
Advances in integrated technology of underwater acoustic communication, navigation, and positioning of submarines
-
摘要: 为了改善潜航器通信和导航定位作为独立载荷时在信息交互、带宽利用率、资源限制等方面的劣势,研究了基于水声的通信导航定位一体化技术。借鉴雷达一体化的发展历程;通过梳理水声通信导航定位一体化的研究成果,结合声呐应用背景,分析了声呐一体化的发展趋势;针对潜航器集群中的基础问题,研究了系统结构的一体化和信号体制2个关键点;最后,在潜航器多用户集群编队、水下测控和靶场建设2个方面进行了应用展望。通过分析阐述,可为未来声呐技术向集成化、一体化发展提供新方法和新思路。Abstract: The integrated technology of communication, navigation, and positioning is studied on the basis of underwater acoustic to improve the disadvantages in information interaction, bandwidth utilization, and resource limitation when the communication and positioning of the submarine are applied as independent loads. This paper analyzes the development trend of sonar integration by combining the research results of underwater acoustic integration and the application background of sonar based on the development of radar integration. The study is focused on two key points of submarine clusters, namely system structure and signal system. Finally, the application prospect of submarines in two aspects, including the multi-user cluster formation, the underwater measurement and control, and underwater tracking range construction, is conducted. Such exploration and analysis can provide new methods and ideas for the integrated development of sonar technology in the future.
-
随着UUV技战术性能持续、快速提升,UUV作为海洋信息化网络的重要节点被大量部署和应用,尤其是以集群形式互相协作执行任务已成为近年来的发展趋势[1]。若要达到高效的协同作业能力,通信、导航定位技术是其完成集群作业的前提和基础[2]。
水声技术因在水下通信、导航、定位等方面的优势,在海洋军民活动中发挥着重要作用。在水下作业中,UUV除了安装为完成任务而携带的载荷外,还需配备用于通信与导航定位的声呐设备。目前,这2种声呐设备常作为独立的2套设备安装和使用,其信息获取、利用效率较低,而且增大了平台的体积、功耗,降低了资源的有效利用率[3]。水声通信、导航定位系统在组成、架构、原理、频段上都有相似之处,一定程度上存在着重复设计的部分,给声呐的通导一体化提供了可能。
声呐系统通导一体化设计兼容了通信和导航定位功能,在提高频带使用率、减小体积、降低功耗等方面都具有显著优势,能够在一定程度上缓解UUV资源有限的问题,可实现UUV资源共享,提高作业效率、扩展任务执行能力、增强作业隐蔽性能等。
1. 一体化技术研究进展
声呐系统的一体化研究正处于发展阶段,而雷达系统的一体化技术已经较为成熟,通过梳理雷达的一体化发展历程,给声呐一体化技术发展提供一些参考和借鉴,有助于一体化的水声通信导航定位技术快速发展,如图 1所示。
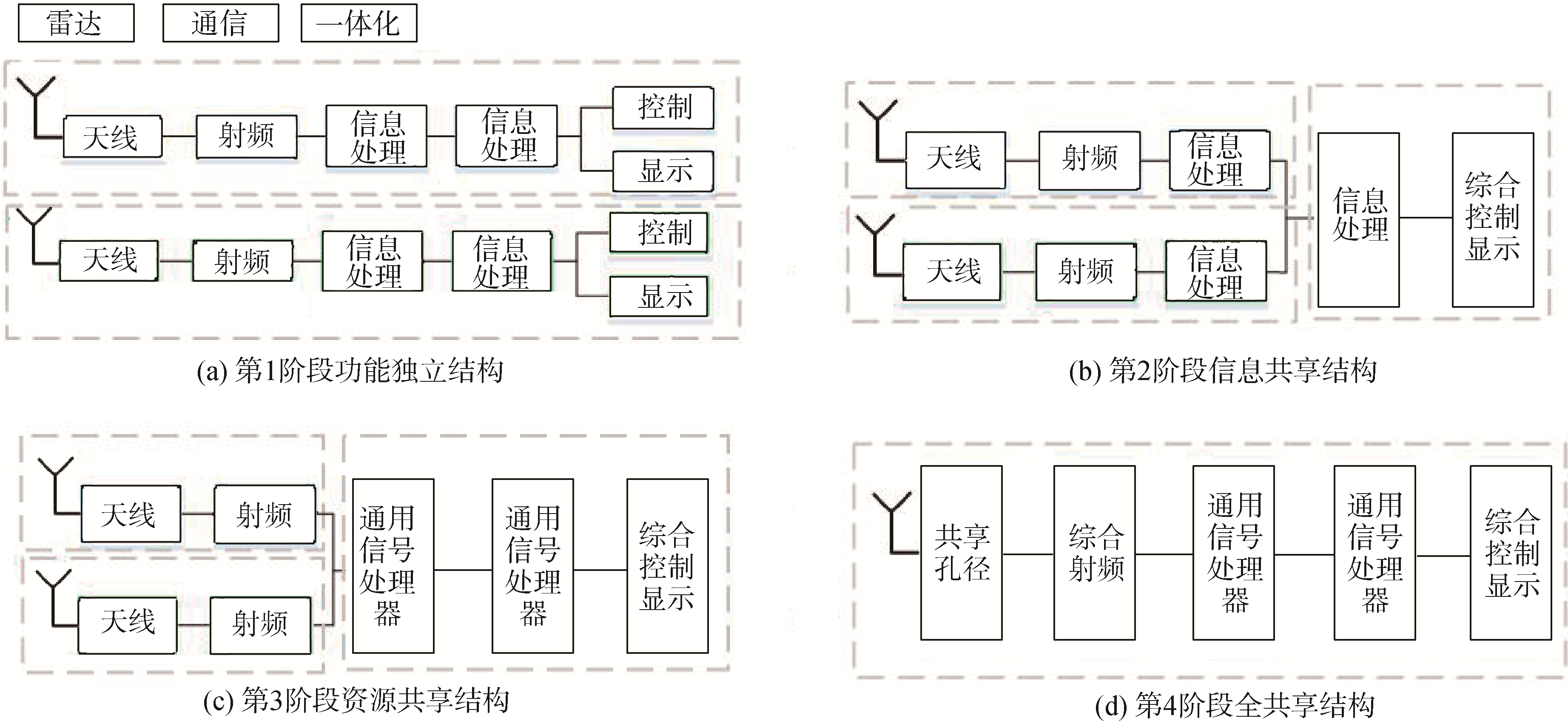 图 1 雷达一体化发展阶段Fig. 1 Radar integration development stage
图 1 雷达一体化发展阶段Fig. 1 Radar integration development stage 下载:
全尺寸图片
下载:
全尺寸图片
1.1 雷达一体化技术发展历程
雷达一体化技术发展的较早,已有广泛应用。自Mealey等[4]提出在雷达上实现通信功能的理念后,利用雷达进行通信、导航的可行性验证和应用研究持续至今。雷达系统的一体化发展历程大致经历了4个阶段[5]:1)功能独立结构,雷达、通信、导航系统集成于一个平台,各自实现独立的功能,在理论上首次提出多功能一体化的概念;2)信息共享结构,雷达、通信、导航等电子系统采用总线机制共享控制与显示终端,提高了系统的自动化程度和操作便捷性,是一体化发展的初级阶段;3)资源共享结构,除了控制与显示终端外,更进一步实现了信号处理机等组件的共享,提高了数据交换速度,实现了信息“零延迟”交互和统一调度;4)全共享结构,进一步实现了对射频通道和天线孔径等资源的共享,传感器子系统的一体化,从而实现电子信息系统的全面融合,迈向智能化。
20世纪60年代,Mealey等[4]利用雷达的脉冲对通信数据进行调制实现了单向通信系统后,雷达一体化研究受到了极大的关注。针对雷达、通信、电子战等多功能一体化需求,1987年,美国空军莱特实验室启动“宝石柱”(Pave Pillar)计划,提出了一个统一的模块化、开放式、具有良好容错性且高度灵活的结构设计规范,被用于第4代战斗机F-22上[6]。20世纪90年代初,美国进一步提出了“综合传感器系统”(integrated sensor system,ISS)和“宝石台”(Pave Pace)计划,研究成果已应用于先进一体化航空电子系统研制中[7]。1996年,美国海军研究局和海军研究实验室联合发起了水面舰船“先进多功能射频系统”(AMRFS)计划,对集成了雷达、电子战和通信等功能在内的宽带射频多功能、低信号特征共用孔径的概念做出了原理性的验证[8]。
2009年,美国海军研究所资助了雷达通信功能融合系统的研究。2013年,美国高级研究计划局DARPA资助了研究项目“雷达通信频谱共享”(shared spectrum access for Radar and communications,SSPARC)[9]。2016年4月,DARPA战略技术办公室发布了“协奏曲”(CONCERTO)项目征询书,旨在为紧凑型无人机设计和实现新的融合式射频架构,为雷达、通信和电子战等一体化带来自适应、灵活可重构等诸多变革性的系统能力。2018年,DARPA和洛马公司共同开展了“体系集成技术与实验”项目研究,旨在将侦查、探测、通信、干扰、打击及评估等各种功能单元进行无缝连接,以及增强单兵便携式多功能装备性能和多兵种协作能力[10]。
1.2 声呐通信导航定位一体化技术
与雷达通信一体化发展历程相似,随着AUV、UUV等无人潜航器的发展,对提供导航定位服务的同时,实现通信一体化的需求越来越迫切。但声呐系统与雷达相比有许多难点,如水下声学信号传输具有带宽窄、基线间距小、传播速度慢、信道复杂等明显的劣势,对基于声呐的通导一体化研究非常不利。为了满足水下信息透明等强烈需求,在诸多国内外学者的努力下,基于声呐的一体化技术也取得了较大进展。
McManus等[11]开发了定向声学应答器(DAT),使用集成了标准声学调制解调器的改进型超短基线(USBL)系统,用通信包信号的到达时间估计方位角和仰角,实现了UUV的海底通信和导航。Watanabe等[12]将AUV中获得的INS数据通过扩频(SS)声学通信方式传输到母船,同时该声信号的数据符号也用于定位,综合定位结果和传输的INS数据,准确跟踪AUV位置。Kebkal等[13]提出了一种基于扫描扩展载波(S2C)技术的定位和通信融合方案,将USBL定位系统与水声调制解调器深度集成,使用相同的声信号来传输信息和估计信号源位置,能够同时跟踪应答器/AUV等目标的运动,并与目标交换即时消息和有效载荷数据,给出了在浅水中USBL的距离和方位实验精度,以及在强混响信道中的数据传输速率。Rodionov等[14]对工作频带12 kHz的调制解调器在10 km距离内的测距精度估计进行了研究。
随着水下任务模式的演变,潜艇、水下UUV等平台已经从“单平台”向“网络化”协作模式演进。相比单体无人潜航器的信息共享方式,进行多水下平台一体化集成时还需考虑模型的适用性和有效性。Caiti等[15]研究了基于时分复用的水下通信网络方案,使用MOOS pub/sub进行应用集成,研究了自主水下机器人集群在网络结构约束条件下的合作定位算法。Yan等[16]提出了一种考虑通信时延的多UUV极地协同导航算法,跟随UUV根据领航UUV发送的信息和超短基线(USBL)声学定位测量的相对位置,修正自身位置和状态,实现高精度导航。
一体化设计是水下网络系统向集成化、信息化、智能化发展的必经之路。在一体化网络系统研究方面,潘笑等[17]提出了一种支持水下通信、定位与导航一体化组网系统,其基于水声换能器通导一体化、兼容主被动的水下定位技术等,利用水声通信定位一体化潜标等关键设备提供高精度定位与导航信息,系统可具备最大100 km2海域范围内的定位导航和400 km2范围内的通信能力。
随着水声一体化技术的发展,以资源共享形式的深度集成一体化结构慢慢呈现。Qiao等[18]提出了一种基于传播损耗、协作、被动、异步分布的UWSNs定位方案,即通信信号传播损耗定位方案(CSPLLS),采用一种新的基于距离的定位方法,根据实验和仿真结果,证实了在质心优化的情况下,定位误差低至2.2%,而且摆脱了节点的时钟资源,实现了水下通信和定位的集成设计。曲思潼等[19]给出了一种基于水声链路的水下潜航器间测距与授时的新方法,采用水声双向伪码授时-测距(Two-Way Pseudocode timing-ranging,T-WPcT-R)及冲突避免多址接入(multiple access with collision avoidance,MACA)协议实现UUV之间的信息交互,利用双向伪距授时-测距(two-way pseudorange timing ranging,T-WPrT-R)体制实现水下UUV间的精密测距及时间同步。
在一体化资源全共享阶段,波形的一体化研究至关重要。Brian Bourgeois等[20]评估了使用不同类型的声学信号解决水下航行器导航、通信和控制问题的有效性,给出了在浅海环境下,当信噪比(SNR)大于-15 dB时,传输速率可以达到350 bit/s,检测概率超过95%,而且相对定位误差不超过0.1%的结论。卢俊等[21]研究了共享体制下基于通信信号的水下探测通信一体化技术,并针对单基地和双基地工作模式,分析了信噪比、误码率与探测性能的关系。胡安平等[22]分析了水声测距通信一体化的技术体制,对水声测距通信共用同步头做了比较,并对线性调频、双曲线调频、伪随机扩频3种信号形式在同步方式下的测距误差及误码率进行仿真分析。徐媛媛[23]为提升水下态势感知能力与信息交互能力,通过分析水声通信信号波形参数与水声定位精度、识别概率间的关联关系,提出水下通信定位识别一体化波形优化设计方法和准则。Yin等[24]提出了一种用于连续主动声呐检测和通信的新型集成波形(IW),分析了IW的时间和频率分辨率以及抗混响能力,并在高斯噪声和多径条件下,比较和分析了2种基于该IW的水声通信接收机的性能。郝梦华[25]提出将复合码作为同步发射序列应用于水声测距系统,针对复合码的三值自相关特性造成多径时延检测误差的问题,提出一种逻辑组合方式构造再生复合码,实验表明在浅海多径及低信噪比(-10 dB)环境下,同步捕获复合码的准确率可达100%。
1.3 水声通信导航定位一体化产品
水声一体化产品的研发一直伴随着相关技术同步发展。近年来,国外几家知名的水声公司已经推出了成熟的定位、通信一体化产品,表 1给出了几种典型产品的参数对比。法国iXblue公司[26]的“Gaps”系列产品不仅可用于水下航行器的精确定位,还可实现水面舰艇和水下航行器之间的双向通信,可用于诸如INS重新对准、传感器数据回传、使用“Canopus”进行LBL阵元校准、AUV控制等。德国EvoLogics公司[27]使用S2C技术可同时实现声学定位与传输数据,如图 2所示。这2个功能在系统中相互补充,不仅用于AUV和ROV的导航、制图、潜水员跟踪等,还用于声学数据传输,可支持USBL和LBL系统。
表 1 国外定位通信一体化产品参数对比Table 1 Comparison of parameters of underwater acoustics integrated products公司名称 产品系列 工作频段 定位方法 定位精度 通信编码 通信速率 IXblue Canopus、Ramses等 MF USBL、LBL、ASBL 最优0.1 m MFSK/MPSK 优于500 bit/s EvoLogics S2C R USBL、S2C R LBL LF、MF、HF USBL、SBL、LBL、iUSBL 最优0.01 m S2C 优于6.9 kbit/s Sonardyne AVTRAK6、ROVNAV6+、ATM、Compatt6+等 MF USBL、LBL 最优0.15 m Wideband 3、Wideband 2 100/9 000 bit/s Kongsberg uPAP、cNODE等 LF、MF SSBL、LBL 最优0.02 m CYMAL宽带编码 优于4.5 kbit/s 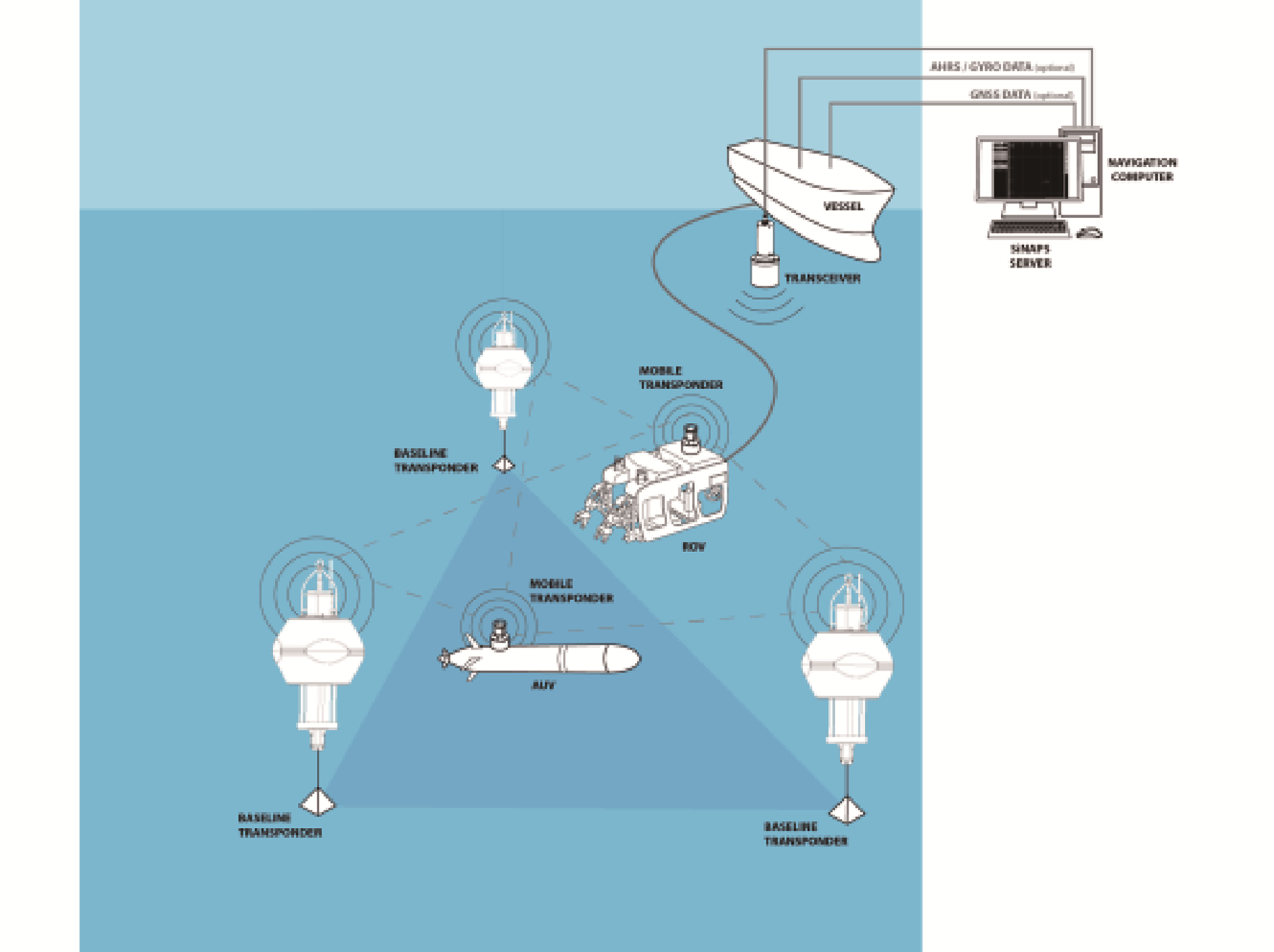 下载:
全尺寸图片
下载:
全尺寸图片
英国Sonardyne公司[28]的“Ranger 2”USBL系列定位产品不仅是声学跟踪和DP参考系统,还具有双向数据遥测功能;“AvTrak 6”系列产品集成了AUV跟踪和导航系统,兼容LBL和USBL,并支持大容量数据传输;“AvTrak 6 Nano”系列更是适合UUV集群,可为UUV同时提供导航定位和位置播发服务。挪威Kongsberg公司[29]的“μPAP”定位产品是一种小型、紧凑的声学定位系统,用于在水面舰艇上跟踪ROV、拖鱼、潜水员等,除此之外,还能利用基于宽带扩频信号进行高速声学数据通信;“cNODE”系列的水声Modem产品,与uPAP定位系统配合使用,兼容SSBL、LBL定位系统,具有水声定位、数据通信功能。
国外水声通信导航定位等一体化产品已得到广泛应用,国内哈尔滨工程大学、中科院声学所东海站等单位已在开展相关产品的研发工作,但尚未有公开发表的成熟产品,与国外在产品化方面存在较大差距。
2. 声呐通信导航定位一体化技术发展趋势分析
源于声波的物理特性和应用环境,现有的水下网络或节点,无论是固定式还是移动式,都面临着频带资源紧张、声信号干扰严重、信息体系不完备等问题。声呐一体化技术能同时为节点提供导航定位与通信功能,节约节点空间、减轻重量、降低能耗、提高系统自动化和智能化程度以及安全性。随着水下应用场景对水下节点在自主性、适用性、高精度、高航速等方面的需求,也对声呐一体化技术提出了新的更高的要求,未来声呐一体化技术发展趋势主要体现在:
1) 具备更快速、更透明的信息传输能力,提高信息传输效率;
2) 具备更高的测量精度和帧率、更低的误码率,改善系统性能;
3) 具备更广的应用范围和适用深度,提升节点使用性能;
4) 具备更复杂、更迅速的水下组网能力,自主、迅速构建网络;
5) 具备更多用户使用能力,一体化程度高,小型化集群应用。
在一体化设计中需统一考虑系统结构,分析重点和难点,信号体制设计是关系到一体化系统性能的重要因素,是研究的关键;针对低信噪比接收、干扰及旁瓣抑制、声学暴露性问题控制、平台移动引起的多普勒补偿等信号处理问题,则需在通信判决与时延估计中进行考虑和设计;未来还需考虑水下组网技术等。其中,系统结构一体化和信号体制是设计的基础和最关键的要素,下面主要对这2方面进行论述。
2.1 系统结构一体化
耦合是一体化结构的优选方式,尤其是紧耦合、深耦合方式,在未来一体化应用场景中,尤其在水下航行器集群应用时优势更明显。根据共享结构不同,从耦合深度划分,通信导航定位一体化结构发展可以分成3个阶段:
1) 松耦合阶段:通信与导航定位系统各自独立工作,通过共享信息提高交互能力,常采用分时或分频体制解决声兼容问题。分时体制是将时间划分为多个间隙,每个间隙独享导航定位信号或通信信号,不能在同一时隙内同时发送2种信号;分频体制是利用不同的频段分别实现导航定位与通信功能,分时分频体制系统简单易实现、干扰小,但是更新效率低,不是严格意义上的耦合结构。如我国4 500 m载人潜水器采用时间同步的方式避免水声通信系统与定位声呐等互相干扰。
2) 紧耦合阶段:通过共享声学传感器基阵、接收部分、发射部分等通用部件,达到减少体积、重量和功耗,在接收端,利用处理器同时对定位信号进行检测和判决解码通信信息,实现导航定位和通信硬件功能一体化。此阶段的工作体制同样可以采用分时或分频体制,对于某些特定功能,还可采用分波束体制。分波束体制在雷达应用较多,是将发射基阵划分为不同的功能区域,实现不同功能,一般在水下应用在多波束声呐上,在定位和通信应用上较少。
3) 深耦合阶段:此阶段为资源全共享阶段,不仅实现了声学传感器基阵、接收部分、发射部分、处理器等硬件平台共享,而且实现了波形、信息处理、功能算法和信息的全共享,不管是前端的接收还是后端的信号处理都具备高度一体化形态,具备全自动化和智能化控制和处理能力,是声呐通信导航定位一体化的理想目标。此阶段的难点在于寻找、设计适合水下声呐多功能应用的一体化波形及相应的信号处理方法。
水下平台的小型化和集群编队将会面临体积、功耗、频带等资源缺乏问题,图 3给出了一体化耦合的3个阶段,一体化的深度耦合方式是首选方式。但是在水下,无论采用松耦合、紧耦合、深耦合的一体化设计,从声学基阵前端到信号处理后端的整个过程都不可避免存在声学干扰问题。一体化结构在前端受换能器工艺、指向性限制,在发射频带外存在不同程度的能量泄露;对于收发分置系统,可采取加装换能器声障板的物理隔离方法,达到隔离收发之间的声干扰问题;对于收发合置系统,可采取延时滤波器方法(加入延迟器、衰减器和移相器等)去除干扰信号;在后端的处理阶段,也会受非对称结构的影响,造成带外泄露。也可采取信道估计、自适应抵消滤波器等对数字化后的信号进行处理,以达到抑制干扰的目的。
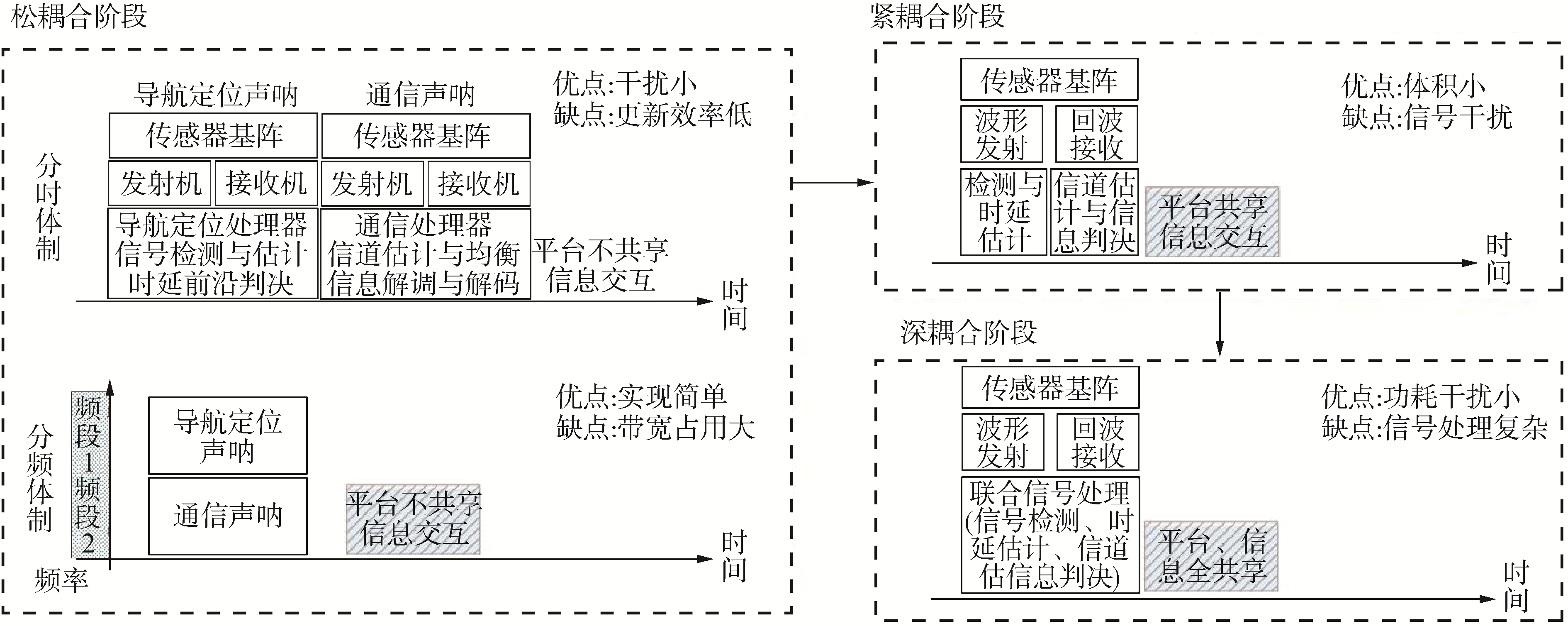 图 3 一体化耦合阶段划分Fig. 3 Sonar integrated coupling stage division下载:
全尺寸图片
图 3 一体化耦合阶段划分Fig. 3 Sonar integrated coupling stage division下载:
全尺寸图片
2.2 一体化信号体制
为了更深层次地实现声呐的一体化设计,共享信号是必经之路,即在同一平台,利用一种信号可同时实现导航定位和通信的功能。在设计过程中,除考虑波形的性能外,还需兼顾声呐环境对波形的适应性及可扩容性。
当前较流行的水声通信信号体制包括单载波、多载波、扩频、脉位调制及仿生水声通信信号等,结合相干MPSK、非相干MFSK、跳频、单边带调制等多体制的水声通信技术也得到了发展[30-32]。水声导航定位信号体制主要是CW脉冲、LFM线性调频、HFM双曲调频等,新的信号体制也得到了广泛关注[30, 32-35]。徐国贵等[33]研究了Gold宽带编码在水声定位中的应用,吴永清等[34]对Pattern时延差编码在水声定位中的时延估计进行了研究。
根据实现方式及波形复用方式,可以将一体化信号体制的共享波形分成表 2给出三大类:叠加波形、基于通信一体化波形和基于定位一体化波形。波形体制为无严格区分或限制,以常用LFM、MSK、CPM、OFDM等信号体制为主的叠加、改进、变形等。
表 2 一体化波形分类Table 2 Integrated waveform classification波形 应用需求 优缺点 在水下应用的限制 叠加波形 集成应用,信号要求正交,应用在性能和效率要求不高平台。 集成易实现,在接收端分离困难,数据率低、干扰大。 频带利用率有限,对接收机和发射机能力要求较高 基于通信一体化波形 应用以通信为主,兼顾定位功能,一般应用在具有较高的数据传输性能上。 具有通信波形的优良特点,低旁瓣、高数据率,高多普勒容限,但是不能同时满足高的时间分辨率。 传播时延大,导致通信速率降低,信道的时变特性对定位精度有影响。 基于定位一体化波形 应用以定位为主,同时有交互数据或命令的能力。 具有定位波形的特点,高可靠性、抗干扰能力,时间分辨率好,但是传输率较低。 受多径干扰影响,以幅度调试或相位调制的波形受干扰较大,性能下降。 1) 叠加的一体化波形:叠加波形是利用2个正交的波形独立产生后叠加合成,分别进行导航定位和通信的调制,波形叠加的前提是2个信号相互正交。对于接收,由于波形是正交的,所以较容易处理和提取,叠加波形解决了2种功能的兼容性,但是效率有限。叠加波形已在雷达上有较多应用,Roberto等[36]研究了利用线性调频(LFM)波形实现雷达与通信的波形集成,以正调频信号作为通信波形,负调频信号作为雷达探测波形,并对误码率、虚警概率与理论值进行了比较;Xu等[37]为了减少雷达交叉和截获概率,提出了一种基于直接序列超宽带(DS-UWB)的雷达与通信集成系统,它利用不同的PN码对雷达和通信数据进行扩频,以避免相互干扰;胡廷舟等[38]对正调频LFM信号进行高阶MPSK调制,然后与负调频信号叠加形成一体化LFM-MPSK波形;代雪飞等[39]为满足设备小型化,提出了一种将线性调频(LFM)信号和最小频移键控(MSK)信号进行融合,针对大多普勒频偏时通信误码率急剧增大的问题给出了解决方法。借鉴雷达的叠加一体化波形,对水声的一体化发展也具有重要意义。周琳等[40]基于单信标水声定位方法提出了线性调频LFM信号和扩频码组合的新型水声定位信号设计方案,更多可适用于水声的叠加一体化波形还有待于进一步研究。
2) 基于通信波形的一体化波形:以通信波形为主,利用或将其改造成为可进行导航定位的波形,通信信息包含定位信号。基于通信波形的一体化波形主要是以编码复用技术为基础,将通信信号改造成适合导航定位的波形,或者在定位精度允许范围内直接采用通信信号作为定位波形。通信编码波形如码分多址(code division multiple access,CDMA)、正交频分复用(orthogonal-frequency division multiplexing,OFDM)和扩频等,可利用信号的频域特性,通过时频变换处理导航定位信号。对于定位处理,独立于通信信号,速度快、旁瓣低,但是此波形是在通信波形基础上改造的,在低信噪比条件下不仅需要大的时间带宽积,而且还需较好的时间分辨率。Sturm等[41]研究基于无线通信,使用经典相位编码波形用于高动态范围的雷达测量,证明了综合通信和雷达应用的实际可行性。王永恒[42]研究了多载波OFDM-MFSK通信信号体制,保留了OFDM系统中良好的抗多途、抗频率选择性衰落、高通信速率和实现简单的优点,并采用非相干的方式实现MFSK信号的检测,具有更好的抗多普勒和抗相位噪声的性能,具备应用于导航定位的潜力。庞永丽等[43]针对水声信道中复杂的噪声环境及各种干扰对定位准确度的影响, 利用扩频通信技术的抗干扰、抗噪声能力, 提出了基于混沌的扩频水声定位信号设计方法,并仿真研究了其性能。
3) 基于定位波形的一体化波形:以定位波形为主,将通信信息调制到定位信号上,定位信号成为传输信息的载体,定位信号包括通信信息。基于定位波形的一体化波形由于要求时延测量精度高、延迟低、实时性强,以定位功能为主,一般波形结构较基于通信的一体化波形简单,所以在数据传输速率上性能不佳。Barrenechea等[44]提出将通信数据以调幅的方式调制在调频连续波雷达信号上,形成调幅-调频连续波(amplitude modulation-frequency modulated continuous wave,AM-FMCW)宽带雷达,但对于水声信道,需要重点解决信号传播过程中出现的幅度衰减不平稳问题。李晓柏等[45]针对系统的抗干扰能力和信号的低截获率,提出了采用同调频率不同初始频率的Chirp信号,实现二进制数据的传送。王诏丰等[46]提出了结合多进制频移键控(multi-frequency shift keying,MFSK)的调制方式,建立了LFM-MFSK的一体化信号模型。殷敬伟[47]研究了Pattern时延差编码(PDS)通信体制和时间反转镜(TRM)技术,采用多种不同Pattern码波形来进行码元分割以抑制码间干扰,提出通过频率分割可实现N通信信道同时工作以提高通信速率。另外,马园等[48]针对占用较少资源和满足应用的前提下,提出一种基于随机频偏调制的频率分集阵一体化波形,将具有随机性的通信信号调制在频率分集阵雷达的频偏上,并在通信信号间增加随机频率间隔,通过有效传输通信信息来提高雷达系统性能,实现特殊环境下的雷达目标定位,也为水声的一体化波形研究提供了新思路。
3. 声呐通信导航定位一体化技术应用展望
通信与导航定位是水下网络或节点的必备功能,具有分布式、网络化、透明、安全、共享的系统模式是未来声呐一体化的主要发展方向。通过各网络节点获取的信息和节点间信息的可靠传输能力,实现水下信息共享、信息融合,从而高效地执行目标导航、定位、探测、跟踪和识别等任务。声呐一体化技术的发展,能够提升水声系统的使用性能。通过梳理国内外声呐一体化技术的进展情况,结合一体化技术在雷达方面的应用效果,综合分析一体化技术的难点、应用要点和关键技术点,声呐一体化技术的主要应用在于:1)能够为水下节点提供了一种快速测量、透明传输、实时安全的运行手段;2)能够为水下节点提供高精度的导航定位、低误码率的信息传输;3)具备复杂、多用户的自组网能力,如UUV的集群等。
3.1 水下多用户集群应用
水下多用户集群是声呐通信导航定位一体化技术的主要应用方向之一。以UUV、AUV为代表的水下多用户移动节点,最初是代替蛙人进行水下勘探、沉船打捞、电缆铺设及维修,后来发展到解决水下调查、侦察、通信和反潜、反水雷任务中遇到的新问题。前期这些应用基本上以单体使用为主,一体化潜在需求不明显。随着航行器的大量应用,为了适应任务的复杂程度和执行效率,潜航器集群使用模式随即浮出水面,多用户信息收集和共享成为潜航器协同作业的基本需求,基于声学技术的通信、导航是水下航行器作业的重要装备,保障了任务的安全性与实时性。但相对独立的2个系统,对实现远距离、长航时的集群任务是非常不利的。
水下潜航器无论单体还是多用户集群作业,除了必需的导航定位信息支持外,针对不同的复杂任务,对信息传输、协同探测、警戒、搜索、攻击、干扰等应用模式都有不同的需求。受限于潜航器的体积、重量、功耗,将通信、导航系统在传感器、电子线路、处理器、信号体制、算法等方面进行紧耦合设计,为集群编队提供导航的同时,可以实现各平台之间的信息交互,提高频带的利用率,减小声学干扰,以满足集群的高精度、高帧率协同定位和通信需求, 如图 4。
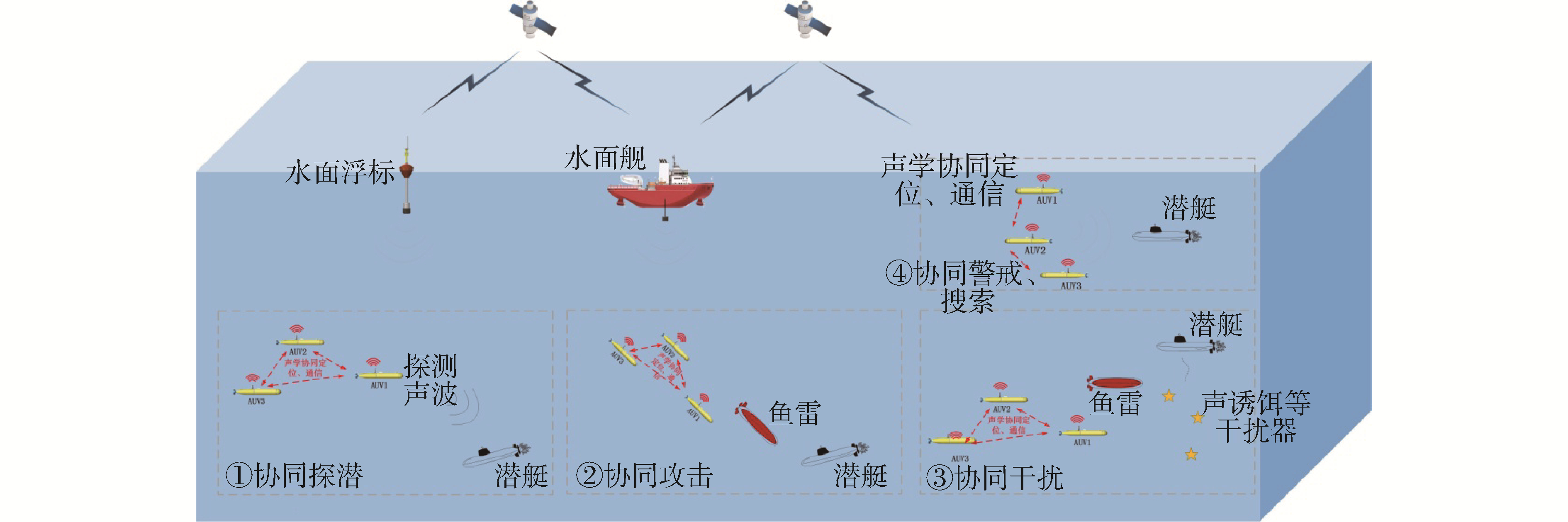 图 4 一体化技术应用在水下集群协作示意Fig. 4 Schematic diagram of integrated technology application in underwater cluster operation下载:
全尺寸图片
图 4 一体化技术应用在水下集群协作示意Fig. 4 Schematic diagram of integrated technology application in underwater cluster operation下载:
全尺寸图片
3.2 水下测控和靶场建设
水声通信导航定位一体化技术的另一个主要应用方向是水下测控和未来靶场建设。水下测控技术是水下协作体系不可或缺的一部分,在水下预警监视系统中,水声测控为其主要手段;在水下指挥通信系统中,水声通信技术是主要手段之一;在水下攻防体系中,水声技术是实现水下态势可视化的主要手段。基于声学技术的水下测控装备是各国水下靶场不可缺少的实航测试方法,为水下靶场提供了大量的测评数据,保障了试验的安全性与实时性。
在水下测控网络中的各种装备主要包括水下潜标等固定式节点和浮标、无人船、航行器、蛙人等移动式节点,以及固定或机动网络部署测控网络等,都离不开水声通信、导航定位技术的支持。随着面对面、半透明到背靠背训练技术的发展,透明的靶场态势和信息交互能力是其有效开展测评的根本要素。水声导航定位和通信属于测控技术的2个方面,随着通信、导航定位技术一体化的提出和研究,新技术的应用能够进一步提高水下测控装备的导航定位、跟踪、导调等综合能力。水下靶场正逐渐向提高测量精度、增加作用范围、扩展深海空间、降低运行成本、增强便捷性与可靠性方向发展,通导一体化已成必然。
4. 结论
1) 通过回顾雷达通信一体化技术发展历程,梳理声呐一体化技术的研究成果和产品,结合应用场景对一体化技术的发展趋势进行了分析和讨论;
2) 重点研究了一体化技术的2个关键点:系统结构的一体化和信号体制设计;
3) 对一体化技术在多用户集群编队、水下测控和靶场建设方面的应用进行了分析。
本文仅是对声呐一体化技术的初步分析和探讨。未来,水下协作将从浅海走向深远海,从较为固定的特定环境向多变、复杂的实战环境,从区域向更广域的信息化网络方向发展,应进一步对水声一体化技术进行深入的研究和验证。
-
图 1 雷达一体化发展阶段
Fig. 1 Radar integration development stage
下载:
全尺寸图片
下载:
全尺寸图片
图 3 一体化耦合阶段划分
Fig. 3 Sonar integrated coupling stage division
下载:
全尺寸图片
图 4 一体化技术应用在水下集群协作示意
Fig. 4 Schematic diagram of integrated technology application in underwater cluster operation
下载:
全尺寸图片
表 1 国外定位通信一体化产品参数对比
Table 1 Comparison of parameters of underwater acoustics integrated products
公司名称 产品系列 工作频段 定位方法 定位精度 通信编码 通信速率 IXblue Canopus、Ramses等 MF USBL、LBL、ASBL 最优0.1 m MFSK/MPSK 优于500 bit/s EvoLogics S2C R USBL、S2C R LBL LF、MF、HF USBL、SBL、LBL、iUSBL 最优0.01 m S2C 优于6.9 kbit/s Sonardyne AVTRAK6、ROVNAV6+、ATM、Compatt6+等 MF USBL、LBL 最优0.15 m Wideband 3、Wideband 2 100/9 000 bit/s Kongsberg uPAP、cNODE等 LF、MF SSBL、LBL 最优0.02 m CYMAL宽带编码 优于4.5 kbit/s 表 2 一体化波形分类
Table 2 Integrated waveform classification
波形 应用需求 优缺点 在水下应用的限制 叠加波形 集成应用,信号要求正交,应用在性能和效率要求不高平台。 集成易实现,在接收端分离困难,数据率低、干扰大。 频带利用率有限,对接收机和发射机能力要求较高 基于通信一体化波形 应用以通信为主,兼顾定位功能,一般应用在具有较高的数据传输性能上。 具有通信波形的优良特点,低旁瓣、高数据率,高多普勒容限,但是不能同时满足高的时间分辨率。 传播时延大,导致通信速率降低,信道的时变特性对定位精度有影响。 基于定位一体化波形 应用以定位为主,同时有交互数据或命令的能力。 具有定位波形的特点,高可靠性、抗干扰能力,时间分辨率好,但是传输率较低。 受多径干扰影响,以幅度调试或相位调制的波形受干扰较大,性能下降。 -
[1] 潘光, 宋保维, 黄桥高, 等. 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25(2): 44-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YLJS201702005.htm PAN Guang, SONG Baowei, HUANG Qiaogao, et al. Development and key techniques of unmanned undersea system[J]. Journal of unmanned undersea systems, 2017, 25(2): 44-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YLJS201702005.htm [2] 周宏坤, 葛锡云, 邱中梁, 等. UUV集群协同探测与数据融合技术研究[J]. 舰船科学技术, 2017, 39(23): 70-75. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201723015.htm ZHOU Hongkun, GE Xiyun, QIU Zhongliang, et al. Research on UUVs cooperative detection and data fusion[J]. Ship science and technology, 2017, 39(23): 70-75. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201723015.htm [3] 张立川, 许少峰, 刘明雍, 等. 多无人水下航行器协同导航定位研究进展[J]. 高技术通讯, 2016, 26(5): 475-482. doi: 10.3772/j.issn.1002-0470.2016.05.007 ZHANG Lichuan, XU Shaofeng, LIU Mingyong, et al. Advances in cooperative navigation and localization for multi-UUV systems[J]. Chinese high technology letters, 2016, 26(5): 475-482. doi: 10.3772/j.issn.1002-0470.2016.05.007 [4] MEALEY R M. A method for calculating error probabilities in a radar communication system[J]. IEEE transactions on space electronics and telemetry, 1963, 9(2): 37-42. doi: 10.1109/TSET.1963.4337601 [5] 吴龙文. 综合电子系统一体化技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2014. WU Longwen. Research on the technology of integrated electronic systems[D]. Harbin: Harbin Institute of Technology, 2014. [6] 沈天伟. "宝石柱(Pave Pillar)"计划及其所提出的航空电子系统结构[J]. 航空电子技术, 1995, 26(3): 8-21. https://www.cnki.com.cn/Article/CJFDTOTAL-HKDZ503.001.htm SHEN Tianwei. Pave Pillar: a maturation progress for an advanced avionics architecture[J]. Avionics technology, 1995, 26(3): 8-21. https://www.cnki.com.cn/Article/CJFDTOTAL-HKDZ503.001.htm [7] 李涛, 李振初, 唐臻富. 先进的一体化航空电子设备: 综合传感器系统(ISS)[J]. 电子对抗技术, 1994, 9(6): 9-13. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDK199406002.htm LI Tao, LI Zhenchu, TANG Zhenfu. Advanced integrated avionics - integrated sensor system (ISS)[J]. Electronic information warfare technology, 1994, 9(6): 9-13. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDK199406002.htm [8] 薛慧, 王虎. 舰载多功能综合射频一体化研究发展现状[J]. 飞航导弹, 2016(8): 46-50. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201608010.htm XUE Hui, WANG Hu. Research and development status of shipborne multifunctional integrated RF integration[J]. Aerodynamic missile journal, 2016(8): 46-50. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201608010.htm [9] 高向东, 郭晓莹. DARPA着眼开发频谱共享技术[J]. 国际电子战, 2013. GAO Xiangdong, GUO Xiaoying. DARPA focuses on developing spectrum sharing technology[J]. Journal of international electronic warfare, 2013. [10] 陈瑶, 严晓芳, 鲁文帅. "电子复兴计划"奏响射频"协奏曲"[J]. 中国电子科学研究院学报, 2019, 14(4): 348-353. https://www.cnki.com.cn/Article/CJFDTOTAL-KJPL201904004.htm CHEN Yao, YAN Xiaofang, LU Wenshuai. "electronics resurgence initiative"Plays the "CONCERTO"of RF[J]. Journal of China academy of electronics and information technology, 2019, 14(4): 348-353. https://www.cnki.com.cn/Article/CJFDTOTAL-KJPL201904004.htm [11] MCMANUS S J. A method of navigation using a modified ultra short base line directional acoustic transponder[C]//OCEANS 2007-Europe. Piscataway, NJ: IEEE: 1-5. [12] WATANABE Y, OCHI H, SHIMURA T, et al. A tracking of AUV with integration of SSBL acoustic positioning and transmitted INS data[C]//OCEANS 2009-EUROPE. Piscataway, NJ: IEEE: 1-6. [13] KEBKAL K G, KEBKAL O G, BANNASCH R, et al. Performance of a combined USBL positioning and communication system using S2C technology[C]//2012 Oceans-Yeosu. Piscataway, NJ: IEEE: 1-7. [14] RODIONOV A Y, KULIK S Y, DUBROVIN F S, et al. Experimental estimation of the ranging accuracy using underwater acoustic modems in the frequency band of 12 kHz[C]//2020 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS). Piscataway, NJ: IEEE: 1-3. [15] CAITI A, CALABRÒ V, FABBRI T, et al. Underwater communication and distributed localization of AUV teams[C]//2013 MTS/IEEE OCEANS - Bergen. Piscataway, NJ: IEEE: 1-8. [16] YAN Zheping, WANG Lu, WANG Tongda, et al. Polar cooperative navigation algorithm for multi-unmanned underwater vehicles considering communication delays[J]. Sensors, 2018, 18(4): 1044. [17] 潘笑, 王鹏, 温雯, 等. 一种百平方千米级水下通信定位导航系统[J]. 舰船科学技术, 2021, 43(1): 161-163, 179. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202101031.htm PAN Xiao, WANG Peng, WEN Wen, et al. An underwater communication and navigation system covering hundreds of square kilometers[J]. Ship science and technology, 2021, 43(1): 161-163, 179. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202101031.htm [18] QIAO Gang, ZHAO Chen, ZHOU Feng, et al. Distributed localization based on signal propagation loss for underwater sensor networks[J]. IEEE access, 7: 112985-112995. [19] 曲思潼, 吴朝慧, 叶旅洋, 等. 基于水声链路的UUV之间测距授时体制[J]. 通信技术, 2021, 54(6): 1356-1362. https://www.cnki.com.cn/Article/CJFDTOTAL-TXJS202106011.htm QU Sitong, WU Zhaohui, YE Lüyang, et al. UUV ranging and timing system based on underwater link[J]. Communications technology, 2021, 54(6): 1356-1362. https://www.cnki.com.cn/Article/CJFDTOTAL-TXJS202106011.htm [20] BLIDBERG B. Integrated communications for underwater operations[C]//15th International Symposium on Unmanned Untethered Submersible Technology (UUST'07). Durham, New Hampshire, USA, 2007: 66-78. [21] 卢俊, 张群飞, 史文涛. 水下探测通信一体化关键技术分析[J]. 水下无人系统学报, 2018, 26(5): 470-479. https://www.cnki.com.cn/Article/CJFDTOTAL-YLJS201805017.htm LU Jun, ZHANG Qunfei, SHI Wentao. Analysis on the key technology of integrated underwater detection and communication[J]. Journal of unmanned undersea systems, 2018, 26(5): 470-479. https://www.cnki.com.cn/Article/CJFDTOTAL-YLJS201805017.htm [22] 胡安平, 高锐, 张建春. 水声测距通信一体化技术分析及试验[J]. 电讯技术, 2014, 54(8): 1052-1058. https://www.cnki.com.cn/Article/CJFDTOTAL-DATE201408003.htm HU Anping, GAO Rui, ZHANG Jianchun. Underwater acoustic communication integration ranging: technical analysis and test[J]. Telecommunication engineering, 2014, 54(8): 1052-1058. https://www.cnki.com.cn/Article/CJFDTOTAL-DATE201408003.htm [23] 徐媛媛. 水下通信定位识别一体化波形优化方法[J]. 现代导航, 2018, 9(4): 279-282. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDH201804009.htm XU Yuanyuan. Optimization method for integrated waveform of underwater acoustic communication positioning and identification[J]. Modern navigation, 2018, 9(4): 279-282. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDH201804009.htm [24] YIN Jingwei, MEN Wei, HAN Xiao, et al. Integrated waveform for continuous active sonar detection and communication[J]. IET radar, sonar & navigation, 2020, 14(9): 1382-1390. [25] 郝梦华. 基于浅海多径结构的复合码水声测距研究[D]. 天津: 天津大学, 2020. HAO Menghua. Research on composite code underwater acoustic ranging based on shallow sea multipath structure[D]. Tianjin: Tianjin University, 2020. [26] Ixblue. Products[DB/OL]. [2022-2-17]. https://www.ixblue.com, 2022. [27] Evologics. PRODUCTS[DB/OL]. [2022-2-17]. https://evologics.de/, 2022. [28] Sonardyne. Products[DB/OL]. [2022-2-17]. https://www.sonardyne.com, 2022. [29] Kongsberg. WHAT WE DO[DB/OL]. [2022-1-15]. https://www.kongsberg.com/, 2022. [30] 袁兆凯. 水声网络中多体制通信关键技术研究[D]. 北京: 中国科学院研究生院, 2012. YUAN Zhaokai. Research on Key Technologies of multi system communication in underwater acoustic network[D]. Beijing: Graduate University of Chinese Academy of Sciences, 2012. [31] 刘凇佐. 仿生隐蔽水声通信技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. LIU Songzuo. Biomimetics Based Covert Underwater Acoustic Communication. Harbin: Harbin Engineering University, 2014. [32] 武岩波, 朱敏, 张琳园, 等. 4 500 m载人潜水器水声通信系统: 调制方式及兼容设计[C]//中国声学学会第十一届青年学术会议会议论文集. 西安, 2015: 250-253. [33] 徐国贵, 朱元林. Gold宽带编码在水声定位信号中的应用研究[J]. 舰船电子工程, 2021, 41(4): 67-69, 84. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC202104016.htm XU Guogui, ZHU Yuanlin. Applied research of gold coding in acoustic positioning signal[J]. Ship electronic engineering, 2021, 41(4): 67-69, 84. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC202104016.htm [34] 吴永清, 邬松, 许枫. Pattern时延差编码水声定位的时延估计研究[J]. 声学技术, 2014, 33(3): 189-192. https://www.cnki.com.cn/Article/CJFDTOTAL-SXJS201403001.htm WU Yongqing, WU Song, XU Feng. Research on time delay estimation in underwater positioning of Pattern time delay shift coding system[J]. Technical acoustics, 2014, 33(3): 189-192. https://www.cnki.com.cn/Article/CJFDTOTAL-SXJS201403001.htm [35] 李焜, 方世良, 安良. 波形未知的水声脉冲信号双阵元相关匹配场定位[J]. 东南大学学报(自然科学版), 2013, 43(2): 236-240. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX201302004.htm LI Kun, FANG Shiliang, AN Liang. Matched field localization using correlation of two-hydrophone underwater acoustic pulse signals with unknown waveform[J]. Journal of Southeast University (natural science edition), 2013, 43(2): 236-240. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX201302004.htm [36] ROBERTON M, BROWN E R. Integrated radar and communications based on chirped spread-spectrum techniques[C]//IEEE MTT-S International Microwave Symposium Digest. Piscataway, NJ: IEEE: 611-614. [37] XU S J, CHEN Y, ZHANG P. Integrated radar and communication based on DS-UWB[C]//2006 3rd International Conference on Ultrawideband and Ultrashort Impulse Signals. Piscataway, NJ: IEEE: 142-144. [38] 胡廷舟, 谢锐, 刘俊, 等. LFM-MPSK雷达通信一体化系统时频联合同步技术研究[J]. 信号处理, 2020, 36(10): 1687-1697. https://www.cnki.com.cn/Article/CJFDTOTAL-XXCN202010009.htm HU Tingzhou, XIE Rui, LIU Jun, et al. Joint timing and frequency synchronization in LFM-MPSK based radar and communication integrated system[J]. Journal of signal processing, 2020, 36(10): 1687-1697. https://www.cnki.com.cn/Article/CJFDTOTAL-XXCN202010009.htm [39] 代雪飞, 陆满君, 张文旭. 基于弹载场景的MSK-LFM雷达通信一体化波形优化[J]. 制导与引信, 2021, 42(3): 5-11, 38. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDYK202103002.htm DAI Xuefei, LU Manjun, ZHANG Wenxu. Waveform optimization of MSK-LFM radar communication integration based on missile borne scene[J]. Guidance & fuze, 2021, 42(3): 5-11, 38. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDYK202103002.htm [40] 周琳, 迟书凯. 基于单信标的水声定位信号设计及捕获算法研究[J]. 中国科技论文, 2015, 10(14): 1622-1625. https://www.cnki.com.cn/Article/CJFDTOTAL-ZKZX201514004.htm ZHOU Lin, CHI Shukai. The research on acoustic positioning and navigation algorithm based on single-beacon[J]. China sciencepaper, 2015, 10(14): 1622-1625. https://www.cnki.com.cn/Article/CJFDTOTAL-ZKZX201514004.htm [41] STURM C, WIESBECK W. Waveform design and signal processing aspects for fusion of wireless communications and radar sensing[J]. Proceedings of the IEEE, 2011, 99(7): 1236-1259. [42] 王永恒. 基于OFDM-MFSK的水声通信技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. WANG Yongheng. Research on the technology of underwater acoustic communication based on OFDM-MFSK[D]. Harbin: Harbin Engineering University, 2017. [43] 庞永丽, 郭亚静, 王黎明. 基于混沌的水声定位信号设计及性能分析[J]. 中国测试, 2017, 43(10): 134-138. https://www.cnki.com.cn/Article/CJFDTOTAL-SYCS201710026.htm PANG Yongli, GUO Yajing, WANG Liming. Design and performance analysis of underwater acoustic positioning signal based on chaos[J]. China measurement & test, 2017, 43(10): 134-138. https://www.cnki.com.cn/Article/CJFDTOTAL-SYCS201710026.htm [44] BARRENECHEA P, ELFERINK F, JANSSEN J. FMCW radar with broadband communication capability[C]//2007 European Radar Conference. Piscataway, NJ: IEEE: 130-133. [45] 李晓柏, 杨瑞娟, 程伟. 基于Chirp信号的雷达通信一体化研究[J]. 雷达科学与技术, 2012, 10(2): 180-186. https://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201202012.htm LI Xiaobai, YANG Ruijuan, CHENG Wei. Integrated radar and communication based on Chirp[J]. Radar science and technology, 2012, 10(2): 180-186. https://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201202012.htm [46] 王诏丰, 廖桂生, 杨志伟. 一种步进MFSK调制的雷达通信共享信号设计方法[J]. 系统工程与电子技术, 2016, 38(8): 1758-1763. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201608008.htm WANG Zhaofeng, LIAO Guisheng, YANG Zhiwei. Signal design method for integrated radar and communication based on step multi-frequency shift keying[J]. Systems engineering and electronics, 2016, 38(8): 1758-1763. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201608008.htm [47] 殷敬伟. 多途信道中Pattern时延差编码水声通信研究[D]. 哈尔滨: 哈尔滨工程大学, 2007. YIN Jingwei. A study of Pattern time delay shift coding communication in underwater acoustic multipath channel[D]. Harbin: Harbin Engineering University, 2007. [48] 马园, 欧阳缮, 廖可非, 等. 基于随机频偏调制的频率分集阵雷达通信一体化波形[J]. 桂林电子科技大学学报, 2019, 39(4): 259-266. https://www.cnki.com.cn/Article/CJFDTOTAL-GLDZ201904001.htm MA Yuan, OUYANG Shan, LIAO Kefei, et al. The waveform of frequency diversity array radar communication integration based on random frequency offset modulation[J]. Journal of Guilin University of Electronic Technology, 2019, 39(4): 259-266. https://www.cnki.com.cn/Article/CJFDTOTAL-GLDZ201904001.htm
