 2017, Vol. 34
2017, Vol. 34扩展功能
文章信息
- 田晶晶, 李世武, 孙文财, 杨志发
- TIAN Jing-jing, LI Shi-wu, SUN Wen-cai, YANG Zhi-fa
- 重型商用车载荷状态动态检测方法及试验研究
- A Dynamic Detection Method and Experimental Study for Loading Condition of Heavy-duty Commercial Trucks
- 公路交通科技, 2017, 34(8): 138-144, 151
- Journal of Highway and Transportation Research and Denelopment, 2017, 34(8): 138-144, 151
- 10.3969/j.issn.1002-0268.2017.08.019
-
文章历史
- 收稿日期: 2016-07-13


2. 吉林大学 交通学院, 吉林 长春 130022
2. Shool of Transportation, Jilin University, Changchun Jilin 130022, China
近年来,随着我国国民经济的快速增长,道路运输业也得到了迅猛的发展。与此同时,交通安全形势日益严峻,道路运输群死群伤的重特大恶性事故频发。统计我国所有道路交通事故可知,生产经营性运输车辆导致的事故伤亡比例较高,并且由道路货运车辆和学校校车肇事导致的死亡人数比例较高。载货汽车超载运行是其道路交通事故发生的主要诱因,载货汽车的安全问题已经成为道路交通安全亟待解决的关键问题之一。针对重型商用车载荷状态动态检测,国内外学者进行了一些研究,例如2002年,K.D.Leimbach等[1]提出了一种通过测量对比轮胎转速来计算车辆质心高度的算法。2005年,密歇根大学A.Vahidi等[2]提出了利用带遗忘因子的递推最小二乘算法实时估算车辆载荷与道路坡度的方法。2008年,弗吉尼亚理工大学S.K.Samuel Ⅲ等[3]提出了一种基于多项式混沌理论的车辆簧载质量估计算法,该方法计算量过大,实时性较差。2009年,S.SOLMAZ等[4]提出了一种车辆质心位置多模型估计算法,该方法对车载终端的计算能力要求高,而且需要预知部分车辆状态参数。2008年,王云鹏等[5]设计了一种通过检测悬架变形量来分析车辆超/偏载状态的装置。2009年,王建强等[6]将两组加速度传感器分别安装在载货汽车后轴的左右两侧悬架与车厢连接处,通过测量车辆两侧的垂向加速度的差异程度来判断货车的偏载情况,该装置检测精度较低。2011年,陈光华等[7]设计了一种采用黏贴式应变片的车载实时动态称重装置,并通过短消息技术实现了车辆超载远程监测,该方法可靠性较差。
本研究的重点是重型商用车载荷状态动态检测方法。针对车辆载荷状态检测问题,基于车辆悬架垂向变形量与轮胎垂向载荷的相关关系,采用拉线式位移传感器设计车辆载荷状态动态检测系统。为验证系统的可靠性与准确性,分别在不同类型道路和载荷状态下进行实车道路试验。
1 车辆载荷状态动态检测装置设计车辆的悬架是车辆重要的总成之一,它把车身和车轮弹性地连接在一起。悬架的主要作用是传递作用在车轮和车身之间的力和力矩,并缓和由不平路面传给车身的冲击载荷,衰减由此引起的振动,保证乘员的舒适性,减小货物和车辆本身的动态载荷。车辆与地面的作用力通过悬架传递给车身,车辆和轮胎之间作用力的大小可以表征为悬架变形量的大小。本研究提出一种带过载保护的车辆悬架变形量检测装置,其结构包括车体连接板、拉线位移传感器、连接钢丝、过载保护机构总成、后轴钢板弹簧连接板、机构紧固装置,其总体结构图如图 1所示。部件之间连接关系为:过载保护机构总成通过连接钢丝与拉线位移传感器相关联,拉线位移传感器由传感器连接螺栓连接到车体连接板,并通过车体连接板与后轴两侧车架侧梁连接,过载保护机构总成通过机构紧固装置与后轴钢板弹簧连接板连接,后轴钢板弹簧连接板连接到后轴两侧的钢板弹簧上。

|
| 图 1 车辆载荷状态动态检测装置 Fig. 1 Dynamic detection device for vehicle load 1—传感器连接螺栓;2,6—连接钢丝固定螺栓;3—车体连接板;4—位移传感器;5—连接钢丝;7—过载保护机构;8—过载保护机构紧固装置;9—过载保护机构紧固螺栓;10—钢板弹簧连接板 |
| |
过载保护机构总成分解如图 2所示,主要由滑轮机构总成、过载保护弹簧、导轨、滑道和紧固螺栓组成。各部件的连接关系为:导轨和滑道是套装具有间隙配合的圆柱形管道,滑道有卡销调整孔,过载保护弹簧套装在导轨的圆柱形管道内,过载保护弹簧及导轨的一端分别通过弹簧固定螺栓、第1导轨固定螺栓和第2导轨固定螺栓连接在滑轮机构总成上,另一端通过卡销螺栓和卡销螺母装在滑道的卡销调整孔上,卡销螺栓在卡销调整孔的位置调整过载保护弹簧的预紧度。

|
| 图 2 过载保护机构分解图 Fig. 2 Decomposition of overload protection device 1—滑轮结构; 2, 9, 10—固定螺栓; 3—过载保护弹簧; 4和8—弹簧位置调整卡销; 5—卡销调整孔; 6—滑道; 7—导轨 |
| |
基于上述车辆悬架变形量检测装置结构及工作原理对该装置进行了试制,并安装于解放赛龙Ⅱ中型载货汽车(双轴载货汽车)的4组钢板弹簧的内侧[8],实车安装情况如图 3所示。

|
| 图 3 车辆载荷状态检测装置样机 Fig. 3 Prototypes of detection device for vehicle load condition |
| |
2 车辆载荷检测数据处理算法
车辆行驶过程中对地面的作用力由车辆静态载荷和动态载荷组成。经验模态分解(Empirical Mode Decomposition,EMD)方法是依据数据自身的时间尺度特征来进行信号分解,无须预先设定任何的基函数。EMD方法在理论上可以应用于任何类型信号的分解,特别是在处理非平稳、非线性数据上,具有非常明显的优势。EMD方法是一种基于信号局部特征的分解方法,它将信号分解为若干个本征模态函数(IMF)和一个残余量r,其中IMF反映了信号的动态特性,r反映了信号的趋势,它能使非平稳数据进行平稳化处理,得到有物理意义的频率。文中将汽车静态载荷作为信号的残余量,动态载荷作为信号中的本征模态函数,通过经验模态分解法从载荷信号中分离出动态载荷,得到汽车的静态载荷值[9]。
EMD方法基于以下假设:任何复杂的信号都是由若干个本征模态函数和残余量组成的,每个本征模态函数可以是线性平稳的或非线性非平稳的。EMD方法采用筛选的方法从原始信号中将本征模态函数分离出来。本文采用EMD方法处理悬架变形量信号的具体步骤如下:
(1) 找出悬架变形量检测装置输出的载荷状态原始电信号x(t)的局部极大值点emax(t)和局部极小值点emin(t),分别将局部极大值点和极小值进行3次样条插值,得到信号的上包络线mmax(t)和下包络线mmin(t)。据此求得原始信号的均值包络线m(t):

|
(1) |
将位移传感器输出原始电信号x(t)与均值包络线m(t)相减,得到第1个分量h1(t),即:

|
(2) |
(2) 检查h1(t)是否同时满足IMF定义的EMD终止条件。如果不能同时满足,则令x(t)=h1(t),转至(1),得到h2(t),即:

|
(3) |
这样经过k次筛选得到:

|
(4) |
直到hk(t)同时满足IMF定义的EMD终止条件,此时得到第1阶IMF分量c1(t):

|
(5) |
(3) 将位移传感器输出原始电信号x(t)减去第1阶IMF分量,可得到剩余量r1(t),即:

|
(6) |
令信号x(t)=r1(t),重复步骤(1) 和步骤(2),得到第2阶IMF分量c2(t),再令

|
(7) |
这样继续分解,直至第n阶分量rn(t)小于预先设定的值,或rn(t)己经成为单调函数时分解结束。这样位移传感器输出原始电信号x(t)可以表示成n个IMF分量和1个平均趋势分量rn(t)的和,即:
|
(8) |
(4) EMD分解正交性检查:具有正交性的信号分解方法可以将原始信号中的噪声信息互不干扰地、独立地提取出来。在数学上,如果函数y1(t)和y2(t)满足:

|
(9) |
将x(t)分解为n个IMF分量:
|
(10) |
即把平均趋势分量rn(t)看作第n+1个分量cn+1(t)。然后对信号x(t)求平方得:

|
(11) |
EMD正交性定义到任意两个本征模态函数ci(t)和ck(t)上[10],其正交性表示为:
|
(12) |
根据车辆不同载荷状态下轴重仪获取的轮胎垂向载荷值及与其对应的悬架变形量检测装置输出电信号。车辆载荷状态动态检测系统标定试验结果如图 4所示,分别为前轴左侧轮胎、前轴右侧轮胎、后轴左侧轮胎和后轴右侧轮胎垂向载荷与悬架变形量的对应关系。

|
| 图 4 悬架变形量检测装置标定结果 Fig. 4 Calibration result of measure device for suspension deflection |
| |
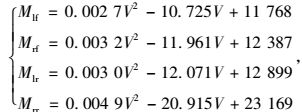
根据车辆轮胎垂向载荷与悬架变形量对应值,采用二次拟合方法得到其映射方程为:
|
(13) |
式中,Mlf为前轴左侧轮胎垂向载荷;Mrf为前轴右侧轮胎垂向载荷;Mlr为后轴左侧轮胎垂向载荷;Mrr为后轴右侧轮胎垂向载荷;V为传感器测量悬架变形量输出电信号。
3.2 B级平直道路试验为了分析平直路面、不同运行工况下行驶时车辆载荷状态动态检测系统工作的可靠性和测量的准确性,在中国第一汽车集团农安汽车试验场的B级平直路面上,分别在5种不同载荷水平(空载、1/4载荷、1/2载荷、3/4载荷和满载)和3种不同车速水平(40, 60, 90 km/h)的正交状态集下进行实车道路试验。以车辆满载、90 km/h车速行驶的试验过程为例,对系统的检测过程进行详细说明。图 5为车辆在B级平直路面行驶[11-12],试验过程中车辆终端以10 Hz的采样频率获取传感器的输出信号。

|
| 图 5 平直路面试验过程 Fig. 5 Straight road test process |
| |
图 6为左前、右前、左后和右后对应的悬架变形量检测装置200 s数据片段的输出电信号。

|
| 图 6 B级平直路面悬架变形检测结果 Fig. 6 Test result of suspension deflection on B-level straight road |
| |
对图 6所示的传感器输出电信号进行频谱分析, 结果如图 7所示,由此可得传感器输出的原始信号是由具有不同频率的信号组成的[13-15],因此可以选用EMD方法进行数据处理。

|
| 图 7 悬架变形数字信号的频率特性 Fig. 7 Frequency characteristic of suspension deflection digit signal |
| |
采用EMD法对悬架变形量检测装置输出电信号进行分解,结果如图 8所示。图中细线为采用EMD方法求解的车辆静态悬架变形量对应的传感器电信号输出值;粗线为悬架变形量检测装置测量的悬架变形量原始信号值。

|
| 图 8 悬架变形量信号EMD分解结果 Fig. 8 Results of suspension deflection signal decomposed by EDM |
| |
图 9为以EMD方法分解4组车辆悬架变形量时,动态检测装置输出的悬架变形量动态信号的正交指标值。4组不同传感器EMD分解结果的正交指标值均小于1%,因此EMD分解具有正交性,说明了EMD分解在车辆载荷信号分解中的有效性。

|
| 图 9 EMD分解正交性指标 Fig. 9 Index of orthogonality of EMD decomposition |
| |
图 10为车辆载荷检测结果,细线为车辆在满载状态下静止时CAS称重仪对车辆总重的测量结果为基准值14.570 t, 粗线为车辆载荷状态动态检测系统对车辆载荷的动态检测值。

|
| 图 10 动态检测值与CAS称重仪静态测量值 Fig. 10 Dynamic measured value and static measured value by CAS weighing instrument |
| |
图 11为车辆行驶于B级平直路面过程中车辆载荷状态动态检测系统对车辆总重的检测误差值。车辆载荷状态动态检测系统检测误差小于3%。

|
| 图 11 车辆满载,90 km/h B级平直路面动态检测系统检测误差 Fig. 11 Measuring error of dynamic measuring systemunder full-loading at 90 km/h on B-level straight road |
| |
图 12为系统对行驶在平直路面过程中车辆载荷分布状态的检测结果。图 12(a)为车辆行驶于平直路面过程中质心的水平位置分布;图 12(b)为左图的局部放大图。车辆质心水平位置在很小的范围内波动,系统可以准确获取车辆载荷的分布状态。若车辆行驶过程中由于货物固定装置失效等原因造成车辆装载的货物位置发生滑移,该系统可以实时动态地检测出车辆质心位置的变化量并对驾驶员发出预警信号,可以预防由异常车辆载荷状态导致的道路交通事故。

|
| 图 12 车辆载荷水平分布状态检测结果 Fig. 12 Measuring result under horizontal vehicle load distribution condition |
| |
车辆在B级平直路面上以不同运行工况行驶时,系统检测误差如表 1所示。系统能够以大于95%的测量精度动态获取车辆载荷状态。
| 装载状态 | 系统测量误差百分比/% | |||||
| 空载 | 1/4载荷 | 1/2载荷 | 3/4满载 | 满载 | ||
| 静态载荷 | 4.920 | 7.205 | 9.665 | 12.080 | 14.570 | |
| 车速/
(km·h-1) | 40 | 3.21 | 4.69 | 3.51 | 4.29 | 2.65 |
| 60 | 3.42 | 4.89 | 3.61 | 4.47 | 1.70 | |
| 90 | 4.01 | 4.52 | 2.62 | 4.30 | 2.48 | |
3.3 强化道路试验
为了进一步分析车辆在强化环路行驶时系统的工作准确性,制订如表 2所示的强化道路试验方案。按照表 2中的车辆载荷状态动态检测系统强化道路可靠性和准确性分析试验方案,对车辆满载在搓板路、鹅卵石路和石块路3种不同的强化路面上进行实车道路试验分析[16-18],图 13为3种不同的强化试验路面。
| 试验项目 | 试验说明 | ||
| 试验场地 | 第一汽车集团农安汽车试验场强化环路 | ||
| 装载状态 | 额定载荷:10 t | ||
| 道路种类 | 搓板路 | 鹅卵石路 | 石块路 |
| 试验过程 | 车辆在不同强化路面上行驶,系统以10 Hz采样频率 获取传感器输出电信号 | ||

|
| 图 13 试验用强化路面 Fig. 13 Strengthened road for test |
| |
车辆满载在3种不同强化路面上行驶时系统检测结果如表 3所示。低速行驶过程中车辆载荷状态动态检测系统对车辆载荷状态的测量精度均小于8%。
| 路面类型 | 搓板路 | 鹅卵石路 | 石块路 |
| 装载质量(满载)/t | 10 | 10 | 10 |
| CAS测量值/t | 14.57 | 14.57 | 14.57 |
| 系统最大检测误差/% | 7.34 | 5.27 | 5.60 |
4 结论
针对车辆载荷状态动态检测问题,基于车辆轮胎垂向载荷与悬架变形量的相关关系,采用拉线式位移传感器设计开发了一种具有过载保护功能的车辆悬架变形量实时动态测量装置。以我国某汽车厂赛龙载货汽车为试验车,以某公司16位MC9S12 XEP100型单片机作为车载终端主控芯片,设计开发了车辆载荷状态动态检测系统试验平台。为了验证车辆载荷状态动态检测系统在车辆行驶过程中工作的准确性,对该检测系统试验平台进行了标定试验,并分别在B级平直路面和强化路面上进行了道路试验。试验结果表明,系统在5种不同车辆载荷水平和3种不同车速水平的正交状态集、B等级平直路面上试验的系统检测误差均小于5%;在3种不同强化路面上行驶的过程中,系统检测误差均小于8%。该系统为车辆载荷状态动态检测及远程监控提供了一种新方法。
| [1] | LEIMBACH K D, WETZEL G. Method and Device for Determining a Quantity Describing the Height of the Center of Gravity of a Vehicle:US, US 6370938 B1[P].[2002-04-16]. |
| [2] | VAHIDI A, STEFANOPOULOU A, PENG H. Recursive Least Squares with Forgetting for Online Estimation of Vehicle Mass and Road Grade:Theory and Experiments[J]. Vehicle System Dynamics, 2005, 43(1): 31-55 |
| [3] | SHIMP Ⅲ S K. Vehicle Sprung Mass Parameter Estimation Using an Adaptive Polynomial-chaos Method[D]. Blacksburg:Virginia Polytechnic Institute and State University, 2008. |
| [4] | SOLMAZ S, AKAR M, SHORTEN R, et al. Real-time Multiple-model Estimation of Centre of Gravity Position in Automotive Vehicles[J]. Vehicle System Dynamics, 2008, 46(9): 763-788 |
| [5] | 王云鹏, 李世武, 隗海林, 等. 一种公路运输车辆偏载检测装置: 中国, CNIO144713OA[P]. [2009-10-07]. WANG Yun-peng, LI Shi-wu, KUI Hai-lin, et al. Highway Transport Vehicle Unbalanced Loading Detecting Device:China, CNIO144713OA[P].[2009-10-07]. |
| [6] | 王建强, 李克强, 李升波, 等. 货车偏载动态检测报警系统: 中国, CN201304933Y[P]. [2009-09-09]. WANG Jian-qiang, LI Ke-qiang, LI Sheng-bo, et al. Dynamic Detection Alarm System of Unbalanced Loading of Freight Vehicle:China, CN201304933Y[P].[2009-09-09]. |
| [7] | 陈广华, 鞠娜, 杨飞, 等. 基于粘贴式应变传感器的车辆超载监测系统[J]. 北京航空航天大学学报, 2011, 04, 37(4): 409-414 CHEN Guang-hua, JU Na, YANG Fei, et al. Monitoring System for Vehicle Overloading Base on Paste-types Strain Senor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 04, 37(4): 409-414 |
| [8] | LI Shi-wu, TIAN Jing-jing, KUI Hai-lin. Design and Implementation of Vehicle Monitoring and Early-warning System Based on WinCE[C]//2011 International Conference on Electric Information and Control Engineering (ICEICE). Wuhan:IEEE, 2011:2073-2076. |
| [9] | 于哲峰, 杨智春. EMD技术在动态称重数据处理中的应用[J]. 机械科学与技术, 2004, 23(4): 444-446 YU Zhe-feng, YANG Zhi-chun. Study on Signal Processing of Dynamic Weighting with EMD[J]. Mechanical Science and Technology, 2004, 23(4): 444-446 |
| [10] | RILLING G, FLANDRIN P, GONCALVES P. On Empirical Mode Decomposition and Its Algorithms[C]//Proceedings of IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing NSIP-03. Grado:IEEE, 2003. |
| [11] | 郑剑, 梁山, 朱勤, 等. 路面连续减速带下汽车悬架的混沌振动分析[J]. 公路交通科技, 2011, 28(1): 132-137 ZHENG Jian, LIANG Shan, ZHU Qin, et al. Chaotic Vibration of Vehicle Suspension Excited by Consecutive Speed Control Hump[J]. Journal of Highway and Transportation Research and Development, 2011, 28(1): 132-137 |
| [12] | 李文亮, 周炜, 张禄, 等. 考虑路面不平度和速度分布的用户目标载荷谱构建方法[J]. 公路交通科技, 2016, 33(12): 154-158 LI Wen-liang, ZHOU Wei, ZHANG Lu, et al. A Method for Constructing Customer Target Load Spectrum Considering Distribution of Road Roughness and Velocity[J]. Journal of Highway and Transportation Research and Development, 2016, 33(12): 154-158 |
| [13] | 李文亮, 周炜, 郭志平. 汽车试验场搓板路可靠性强化试验仿真研究[C]//2008中国汽车工程学会年会论文集. 北京: 中国汽车工程学会, 2008: 1451-1455. LI Wen-liang, ZHOU Wei, GUO Zhi-ping.Research on Reliability Enhancement Test of Washboard Road in Automobile Proving Ground[C]//2008 SAE-China Congress Proceedings. Beijing:Chinese society of Automotive Engineering, 2008:1451-1455. |
| [14] | 郭虎, 陈文华, 樊晓燕, 等. 汽车试验场可靠性试验强化系数的研究[J]. 机械工程学报, 2004, 40(10): 73-76 GUO Hu, CHEN Wen-hua, FAN Xiao-yan, et al. Research of Enhancement Coefficient of Automobile Reliability Enhancement Test on Proving Ground[J]. Chinese Journal of Mechanical Engineering, 2004, 40(10): 73-76 |
| [15] | 王国丽, 王丽君, 姜宏, 等. 汽车强化道路可靠性试验强化系数的研究[J]. 车辆与动力技术, 2013(2): 1-3 WANG Guo-li, WANG Li-jun, JIANG Hong, et al. Research on Enhancement Coefficient on Enhanced Road in Vehicle Reliability Test[J]. Vehicle & Power Technology, 2013(2): 1-3 |
| [16] | 许源, 朱顺应, 彭武雄, 等. 基于汽车动力学的振动减速带设置间距研究[J]. 交通与科技, 2008(1): 101-103 XU Yuan, ZHU Shun-ying, PENG Wu-xiong, et al. Vibrating Deceleration Facilities' Space Study Based on Vehicle Dynamics[J]. Transportation Science and Technology, 2008(1): 101-103 |
| [17] | KHORSHID E, ALKALBY F, KAMAL H. Measurement of Whole-body Vibration Exposure from Speed Control Humps[J]. Journal of Sound and Vibration, 2007, 304(3/4/5): 640-659 |
| [18] | LI S, YANG S, GUO W. Investigation on Chaotic Motion in Hysteretic Non-linear Suspension System with Multi-frequency Excitations[J]. Mechanics Research Communications, 2004, 31(2): 229-236 |