 2017, Vol. 37
2017, Vol. 37


2. 北斗导航应用技术河南省协同创新中心,郑州市科学大道62号,450001
本文对测量型接收机的架构进行介绍[1-2],分析接收机的GNSS模块、控制模块及其外部的通信机制,设计出基于控制平台实时获取GNSS模块数据并具备实时解码功能的测量型接收机原理样机。采用零基线对数据进行验证,确认平台具有稳定性与可靠性。
1 接收机系统设计测量型接收机主要由GNSS模块、控制模块、显示屏、外部接口和电源等组成[2]。测量型接收机原理样机的GNSS模块采用BD970 OEM板卡,主要用于接收卫星信号并输出接收到的卫星星历数据和观测数据,支持GPS、GLONASS、Beidou、Galileo、QZSS、SBAS等系统,能够满足用户对多系统数据处理的要求。选用基于ARM7架构的卡片式电脑作为控制平台,主要用于获取BD970 OEM板卡输出的数据并进行处理,控制LCD屏显示卫星状态信息和接收机状态信息。该平台基于Linux系统,能够保证程序稳定运行。电源系统、外部通信接口等集成在一块母板上。测量型接收机原理样机的设计图如图 1所示。

|
图 1 接收机架构设计 Fig. 1 The design of receiver architecture |
母板上各部分设计如下。
1) 电源部分采用降压稳压设计,能够为ARM7架构的卡片式电脑和BD970 OEM板分别提供5 V和3.3 V的稳定电源输入,排除由于电源故障而造成系统连带破坏的可能。采用外部电源与内部蓄电池无缝切换的供电模式,可完全满足野外测量时对电源的要求。
2) ARM7架构的卡片式电脑的网口端1连接网络,可以为实时数据解算提供从IGS等网站下载的相关数据。LCD显示屏可显示当前的卫星状态信息与接收机状态信息,并配有相关信息的指示灯。
3) BD970 OEM板的网口端2方便用户登录Web界面,进行BD970 OEM板的相关配置并下载其数据。用户也可以通过母板上的串口2以二进制命令操作BD970 OEM板[3]。
2 数据采集与解码BD970 OEM一般输出ASCⅡ码与二进制两种形式的数据。ASCⅡ码主要为NMEA格式的数据,包括定位的经纬度、DOP值、时间信息等,其应用非常广泛。但是NMEA不能为数据解算提供原始伪距观测值、载波观测值和星历信息,这一部分的信息要从原始二进制数据中获得。
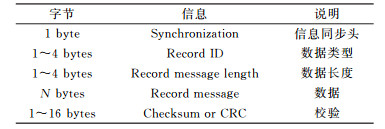
BD970提供CMR、RTCM、RT27和Binex等多种数据格式,由于受数据协议保密的限制,前3种数据格式并不能完全解码多系统数据,所以采用Binex二进制数据进行解码[4]。Binex数据包括多种数据类型,每种数据类型都由数据头、数据类型、数据长度、数据部分、校验位组成(表 1)。Record=01h数据主要包含GPS、GLONASS、Beidou、Galileo、QZSS、SBAS等系统的星历信息,不同的系统以不同的子数据类型区分,Record=7fh的数据为观测值信息。
|
|
表 1 Binex二进制消息格式 Tab. 1 Binex binary message format |
实时接收程序符合串口数据传输协议和网口(Ntrip)数据传输协议,以满足不同情况下的数据传输需求。接收到BD970的二进制数据流首先进行同步头的检验,找到同步头后根据数据的长度信息判断校验位所占的比特位长度,计算出校验位并与接收到的校验位进行比较,校验通过后根据Binex数据协议解算出Record message的信息。解码流程如图 2所示。
3 零基线检验
零基线检验是将测量型接收机原理样机与Trimble NetR9通过功分器连接至同一天线,功分器的作用是将天线信号分成两路分别送至两台接收机。利用这一特性,通过对两台接收机的双差相位观测值进行处理,得到的坐标增量Δx、Δy、Δz和基线长度S的真值应该为0。根据《全球定位系统校准规范》规定,在任意时段基线长度小于1 mm,就认为接收机精度达到标准[6]。
零基线检验法可以消除一系列影响观测值精度的误差来源,包括卫星钟误差、卫星轨道误差、星历误差、电离层和对流层误差、卫星几何图形的影响、天线的多径效应误差、天线相位中心偏移误差和天线的安置误差,所以其能较真实地反映测量型接收机原理样机的质量水平。
4 实验及结果验证 4.1 实时数据流解码实验通过BD970 OEM板卡的Web界面设置接收机的输出数据类型为Binex,BD970 OEM板通过与ARM7架构的卡片式电脑之间的串口将采集到的实时数据传输到卡片式电脑,卡片式电脑在存储原始数据流的同时进行解码,并采用零基线解算验证解算数据的正确性。2016-07-15在郑州某已知点进行静态测试,当天天气晴朗,无遮挡,测量环境良好。测量型接收机原理样机与Trimble NetR9通过功分器连接同一天线,连续运行24 h,数据采样率均为1 s。
测量型接收机原理样机存储的原始二进制流文件如图 3所示,解码得到的星历数据如图 4所示,解码的观测数据如图 5所示(受篇幅限制,图中只截取了部分解码结果)。由实验结果可知,测量型接收机原理样机可连续稳定地运行,持续实时解码原始二进制数据流并产生星历文件与观测值文件。

|
图 3 存储的二进制数据流 Fig. 3 The stored binary data stream |

|
图 4 解码获得的N文件 Fig. 4 The N file decoded from real-time data stream |

|
图 5 解码获得的O文件 Fig. 5 The O file decoded from real-time data streams |
完成数据解码后,需要验证数据的完整性与可靠性。选取2016-07-15 14:00~16:00测量型接收机原理样机解码产生的O文件、N文件和Trimble NetR9采集的观测数据。对两台接收机同一观测时段的RINEX文件进行对比,图 6和图 7分别显示了Trinmble NetR9和测量型接收机原理样机实时解码得到的同一观测时段观测卫星数。可以看出,同一时段内两台接收机的观测卫星相同,SBAS数据暂不进行比较。

|
图 6 Trimble NetR9的卫星观测数 Fig. 6 Satellite observations numbers of Trimble NetR9 |

|
图 7 测量型接收机原理样机实时解码得到的卫星观测数 Fig. 7 The satellite observations numbers obtained by real-time decoding of the prototype of the geodesic receiver |
利用RTKlib2.4.3软件对测量型接收机原理样机解码产生的O文件、N文件和Trimble NetR9采集的观测数据进行相对定位解算,星历文件采用测量型接收机原理样机实时解码得到的N文件。各个方向残差估计值和基线距离变化如图 8所示,数据统计结果如表 2所示。由结果可知,测量型接收机原理样机实时解码得到的数据能够满足用户对cm级甚至mm级的定位需求,验证了实时数据解码的正确性。

|
图 8 3个方向的残差估计和基线距离变化 Fig. 8 Residual estimation of 3 directions and baseline distance variation |
|
|
表 2 测量型接收机原理样机与Trimble NetR9零基线解算统计 Tab. 2 The zero baseline solution statistical results of geodesic receiver principle prototype and Trimble NetR9 |

本文自主设计了GNSS数据信号采集与处理平台,结合BD970 OEM板与ARM7架构的卡片式电脑,完成了电源设计以及数据通信的硬件设计,方便用户实时地分析处理数据和远程操作接收机。其次,分析了BD970 OEM板的原始二进制数据,并在测量型接收机原理样机内部完成了实时数据流的传输与解码,得到了多系统观测数据和星历,为实时数据处理和接收机内部算法的二次开发奠定了基础。最后,通过解码实例和零基线检验,验证了测量型接收机原理样机的可靠性和稳定性。
致谢: 感谢信息工程大学iGMAS分析中心给予的帮助和支持。
| [1] |
常莉.基于ARM静态测量型GPS接收机设计[D].武汉: 中国地质大学, 2009 (Chang Li. Design of Static Measurement GPS Receiver Based on ARM [D].Wuhan: China University of Geosciences, 2009)
(  0) 0) |
| [2] |
谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2009 (Xie Gang. Principles of GPS and Receiver Design[M]. Beijing: Publishing House of Electronics Industry, 2009)
( 0) |
| [3] |
Liu G, Xiao A P, Qian H. Communication System Design Based on TMS320F2407 with CAN Bus[J]. AASRI Procedia, 2012(3): 463-467
( 0) |
| [4] |
李萌, 胡绍林. 一种解码接收机原始二进制数据的方法[J]. 全球定位系统, 2014, 39(3): 59-61 (Li Meng, Hu Shaolin. A Approach for Decoding Raw Binary Data of Receiver[J]. GNSS World of China, 2014, 39(3): 59-61)
( 0) |
| [5] |
邹进贵, 李勇. GNSS天线阵列接收机数据采集与解码的实现与应用[J]. 测绘通报, 2015(8): 1-3 (Zou Jingui, Li Yong. Implementation and Application of Data Collecting and Decoding Based on GNSS Antenna Array Receiver[J]. Bulletin of Surveying and Mapping, 2015(8): 1-3)
( 0) |
| [6] |
杜鹃, 张会, 刘星, 等. 基于零基线的GPS/BD2兼容接收机精度检测方法研究[J]. 舰船电子工程, 2013, 33(7): 121-123 (Du Juan, Zhang Hui, Liu Xing, et al. Precision Detection Method of GPS/BD2 Compatible Receivers Based on Zero-Basedline[J]. Ship Electronic Engineering, 2013, 33(7): 121-123)
( 0) |
2. Beidou Navigation Technology Collaborative Innovation Center of Henan, 62 Kexue Road, Zhengzhou 450001, China