 2017, Vol. 37
2017, Vol. 37


传统FG5绝对重力仪一般通过硬件电路检测干涉条纹过零点时刻来测量重力值[1]。随着高速ADC器件等技术的发展,完整记录棱镜自由落体产生的干涉条纹成为一种可能。相对简单的过零时刻而言,完整的干涉条纹信号能提供更多的重力信息,干涉条纹数字化后可结合无相移滤波器滤除部分噪声提高其信噪比。另外可灵活采用多种数据处理算法,有益于进行重力测量系统的优化设计。对软硬件处理干涉条纹进行对比分析,见表 1。
|
|
表 1 软硬件处理干涉条纹对比分析 Tab. 1 Comparison between software and hardware to process the interference fringes |
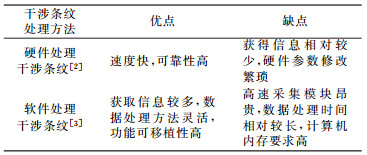
文献[2]详细介绍了硬件电路实现干涉条纹过零检测的方法与步骤,文献[3]进一步说明FG5绝对重力仪中采用的AD9696高速过零比较器,并估计其相位延时的影响小于0.6 μGal;文献[4]对5种软件处理干涉条纹的数据处理方法进行对比分析;文献[5-7]介绍了双采样过零检测算法的实现步骤和线性插值的误差分析;文献[8-9]详细介绍了二阶差分法处理实时数据的过程与误差分析;文献[10-11]介绍了一种通过正交干涉条纹来获取重力值的方法,能显著降低数据处理对内存与采样频率的要求;文献[12-13]描述了非线性最小二乘法来拟合重力值的计算方法。基于高速采集模块与过零比较器件等软硬件干涉条纹的处理方法,可同时测量重力加速度。利用不同的测量方法对同一重力加速度开展测量,对研究系统误差与完善重力仪器具有重要意义。本文针对自由落体方式的绝对重力仪,基于双采样过零检测的数据处理方法,详细分析了干涉条纹电压信号幅值与ADC相关参数对重力测量的影响。计算结果表明,参数优化能将ADC量化等因素引入的重力值偏差限制在0.01 μGal。
1 双采样过零检测光电转换器实现干涉条纹由光信号到电信号的转换,其测量电压可表示为[4]:

|
(1) |
式中,u0和β分别表示直流偏置和线性漂移因子(数据预处理中可以滤除),A0和Ф分别表示干涉条纹信号幅值和相位,其中干涉条纹相位Ф直接与落体棱镜位移S相关,表示为:
|
(2) |
式中,θ0表示初始相位,λ为激光波长。若已知当地重力梯度因子γ,落体棱镜的位移可表示为:
|
(3) |
式中,s0、v0和g0分别表示棱镜下落起始点的位移、速度和加速度信息。若重力梯度信息γ未知,也可直接利用二阶模型计算等效高度heff处的重力加速度geff=g0+γheff,然后进行归算。为简化计算与分析,这里假设重力梯度为0。
基于双采样过零检测方法,对干涉条纹信号的基本处理流程如图 1所示。高速ADC模块将干涉条纹模拟电压转为数字信号;数据预处理可扣除干涉条纹数字信号中的零偏与线性漂移;零相位低通滤波器能抑制部分高频噪声干扰,并防止在零点附近出现多次穿越而产生伪过零检测点。由于正弦信号在零点附近可一阶近似为sinx≈x,利用Ui×Ui+1≤0可确认穿越零点且符号相反的两点Ui和Ui+1,因此可通过线性插值估计出干涉条纹过零点时刻








|
图 1 双采样过零检测方法的数据处理流程 Fig. 1 Two-sample zero-crossing digital fringe signal processing flow |

|
图 2 线性插值计算过零点时刻 Fig. 2 Schematic diagram of obtaining zero-crossing time by linear interpolation |
采用高速ADC模块对干涉条纹正弦电压信号进行数字化时,其最小台阶电压值可表示为
|
(4) |
式中,Round(x)表示距离x最近的整数值。
当高速ADC的VLSB较大时,其幅值精度较差,量化后在零点附近可能产生多个零值电压,如图 3中的红色圆圈所示,这使得利用Ui×Ui+1≤0计算过零点的方法产生较大误差。理想情况下,期望干涉条纹信号U(t)进行量化后的电压信号VADC在零点附近仅有两个符号相反且分别位于横轴上下的测试点,这要求两点之间的电压差大于VLSB。若假设tz为干涉条纹过零点时刻,sz为该时刻的位移,

|
(5) |

|
图 3 最小台阶电压值VLSB过大的量化电压曲线 Fig. 3 Quantization fringe voltage curve with large VLSB |
为了使零点附近的量化电压不全为0,其电压差
|
(6) |
式(6)保证了在tk, start时刻之后的量化电压不会连续出现两个零值;该时刻的选取与干涉条纹幅值A0成反比,与台阶电压VLSB、波长λ和采样频率fs成正比。在重力仪实际工作中,拟合数据的选取还需要避开棱镜起始下落与捕获阶段震动的影响,例如MPG系列重力仪仅选取干涉条纹信号频率大于1 MHz的数据进行参数拟合[15]。
为了分析干涉条纹量化过程对重力值精度的影响,这里详细讨论重力值随参考电压Vref、ADC位数N、采样频率Ts和正弦幅值A0等参数的变化,为重力仪参数优化设计提供理论依据。典型仿真参数如表 2所示,在仿真过程中为简化计算,可忽略干涉条纹中的直流偏置和线性漂移因子,并设拟合表达式(3)中重力梯度为零,这样即可略过图 1中的数据预处理步骤,且在最小二乘拟合时选取满足式(6)的数据段。
|
|
表 2 双采样过零检测方法中的仿真参数 Tab. 2 Simulation parameters of two-sample zero-crossing method |
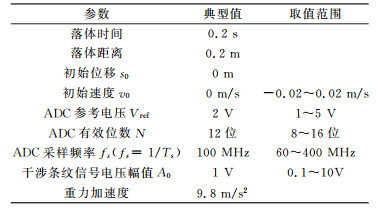
设ADC的有效位数从8到16位变化,其他参数如表 2所示。重力估计值与9.8 m/s2之间差异Δg的变化曲线如图 4所示。重力值差异Δg随着ADC有效位数的增加而减小,且该差异与落体棱镜初始速度v0相关。当有效位数N大于等于10时,重力值差异Δg≤0.01 μGal。

|
图 4 重力值与真值之间的差异随ADC有效位数的变化 Fig. 4 Gravity's variation for the high speed ADCs having resolution between 8 and 16 bits |
若设置ADC参考电压Vref从1~5 V变化,其测量范围将由±1 V变化到±5 V,重力估计值与真值9.8 m/s2之间的差异Δg如图 5所示。重力值差异Δg随着参考电压Vref的增加有增加的趋势,若设置参考电压为典型值Vref = 2 V,重力值差异Δg < < 0.01 μGal。

|
图 5 重力估计值与真值之间的差异随参考电压的变化曲线 Fig. 5 Gravity's variation for the reference voltage between 1 V and 5 V |
根据奈奎斯特采样定理,采样频率至少大于信号频率2倍,而干涉条纹频率最高约6 MHz左右,因此ADC采样频率至少应大于12 MHz。图 6所示为采样频率fs(fs=1/Ts)变化时,重力估计值与9.8 m/s2之间差异随之变化的曲线。随着采样频率fs的增加,该差异Δg越来越小,当采样频率fs大于20 MHz时,重力偏差Δg小于0.1 μGal;当采样频率fs大于100 MHz时,重力偏差Δg不再明显减小;若选取典型采样频率为100 MHz,重力值差异Δg≤0.01 μGal。

|
图 6 重力值与真值之间差异随采样频率的变化曲线 Fig. 6 Gravity's variation for the sampling rates between 20 MHz and 400 MHz |
当选取的干涉条纹信号幅值范围在0.1~10 V变化时,估计的重力值随幅值A0的变化曲线如图 7所示。图中3条曲线分别表示不同初始速度时重力值与9.8 m/s2之间的差异,竖直点线为ADC输入饱和时的幅值,当干涉条纹幅值越接近ADC满量程时,重力差异将随之减小。这里采用双采样过零检测方法进行重力值提取,因此当干涉条纹幅值A0超过ADC量程时仍能正常获得过零点时刻,并正确计算重力值;当幅值A0过大时重力值差异将急剧增加,一般可将干涉条纹幅值设置为ADC量程的0.5~0.8,此时干涉条纹幅值的影响被限制在0.01 μGal。

|
图 7 重力估计值与真值之间差异随干涉条纹幅值A0的变化曲线 Fig. 7 Gravity's variation for amplitude of the fringe voltage between 0.1 V and 10 V |
基于数字化的干涉条纹信息,详细分析了双采样过零检测方法中ADC等效位数、参考电压、采样频率、干涉条纹幅值等对重力值测量精度的影响。结果表明,参数优化能将这些因素引入的重力值偏差限制在0.01 μGal。采用软件处理干涉条纹计算重力值的精度不仅与ADC参数设置相关,还需要结合落体棱镜旋转、落体系统震动、光电转换模块噪声等因素进行综合考虑。
| [1] |
MicroG-Lacoste. G9 User's Manual[Z]. 2012
(  0) 0) |
| [2] |
Zumberge M A, Rinker R L, Faller J E. A Portable Apparatus for Absolute Measurements of the Earth's Gravity[J]. Metrologia, 1982, 18(3): 145 DOI:10.1088/0026-1394/18/3/006
( 0) |
| [3] |
Niebauer T M, Sasagawa G S, Faller J E, et al. A New Generation of Absolute Gravimeters[J]. Metrologia, 1995, 32(3): 159-180 DOI:10.1088/0026-1394/32/3/004
( 0) |
| [4] |
Svitlov S, Araya A, Tsubokawa T. Digital Fringe Signal Processing Methods in Absolute Gravimetry[C]. IAG Symposium Onterrestrial Gravimetry: Static and Mobile Measurement TG-SMM, Saint Petersbourg, 2013
( 0) |
| [5] |
胡华, 伍康, 申磊, 等. 新型高精度绝对重力仪[J]. 物理学报, 2012, 69(9): 99-101 (Hu Hua, Wu Kang, Shen Lei, et al. A New High Precision Absolute Gravimeter[J]. Acta Phys Sin, 2012, 69(9): 99-101)
( 0) |
| [6] |
Svitlov S, Rothleitner C, Wang L. Accuracy Assessment of the Two-Sample Zero-Crossing Detection in a Sinusoidal Signal[J]. Metrologia, 2012, 49(4): 413-424 DOI:10.1088/0026-1394/49/4/413
( 0) |
| [7] |
Altice K S, Meer D E. Estimating Zero-Crossings of Uniformly Sampled Data[C]. IEEE Areospace and Electronics Conference, 1991
( 0) |
| [8] |
Tsubokawa T. A Fringe Signal Processing Method for an Absolute Gravimeter[J]. Metrologia, 1984, 20(3): 107-113 DOI:10.1088/0026-1394/20/3/006
( 0) |
| [9] |
Tsubokawa T, Svitlov S. New Method of Digital Fringe Signal Processing in an Absolute Gravimeter[J]. IEEE Transactions of Instrumentation and Measurement, 1999, 48(2): 488-491 DOI:10.1109/19.769637
( 0) |
| [10] |
Niebauer T M. Analytical Signal Demodulation of Phase-Modulated Frequency-Chirped Signals[J]. Applied Optics, 2013, 52(9): 1838-1846 DOI:10.1364/AO.52.001838
( 0) |
| [11] |
Svitlov S, Araya A. Homodyne Interferometry with Quadrature Fringe Detection for Absolute Gravimeter[J]. Applied Optics, 2014, 53(16): 3548-3555 DOI:10.1364/AO.53.003548
( 0) |
| [12] |
Niebauer T M, Schiel A, Westrum D V. Complex Heterodyne for Undersampled Chirped Sinusoidal Signals[J]. Applied Optics, 2006, 45(32): 8322-8330 DOI:10.1364/AO.45.008322
( 0) |
| [13] |
Svitlov S, Maslyk P, Rothleitner C, et al. Comparison of Three Digital Fringe Signals Processing Methods in a Ballistic Free-Fall Absolute Gravimeter[J]. Metrologia, 2010, 47(6): 677-689 DOI:10.1088/0026-1394/47/6/007
( 0) |
| [14] |
Kester W.Taking the Mystery out of the Infamous Formula "SNR = 6.02N + 1.76 dB, " and Why You Should Care[Z]. Analog Devices, MT-001Tutorial, 2005
( 0) |
| [15] |
Rothleitner C H, Svitlov S, Mérimèche H, et al. Development of New Free-Fall Absolute Gravimeters[J]. Metrologia, 2009, 46(3): 283-297 DOI:10.1088/0026-1394/46/3/017
( 0) |