 2017, Vol. 37
2017, Vol. 37


2. 山东大学空间科学研究院,威海市文化西路180号,264209;
3. 地理信息工程国家重点实验室,西安市雁塔路中段1号,710054
俄罗斯的GLONASS是继美国GPS之后的第2个建成使用的全球导航定位系统。所有GLONASS卫星均装有激光反射器,可以进行卫星激光测距[1-4]。欧洲轨道确定中心(CODE)提供所有GPS和GLONASS的最终轨道产品[5],其精密轨道采用3 d弧段数据进行解算,取中间一天解,以15 min为间隔给出每颗GNSS卫星的精密星历[6]。
卫星激光测距(SLR)是目前导航卫星轨道精度唯一的外部检核手段[6]。文献[7]用CDDIS(crustal dynamic data information system)提供的2003~2004年10个月的SLR标准点格式数据检核CODE提供的GLONASS轨道,残差均值和标准差分别为-2.3 cm和4.9 cm。文献[5]对GLONASS卫星激光反射器质心补偿常数进行修正,利用2004~2006年数据检核其残差均值和标准差分别为-1 cm和5 cm。文献[8]利用2002~2013年数据对GLONASS卫星轨道进行检核,得到整体残差均值和均方根值优于1 cm和4 cm。国内关于GLONASS卫星综合检核的文献并不多,而针对卫星轨道的长期检核,由于统计策略不同检核结果也存在差异。本文利用EDC(European data center)提供的SLR标准点格式数据[9]对2015年的GLONASS卫星进行轨道检核,并分别从卫星轨道面和SLR测站两个方面进行分析。
1 检核原理及模型改正利用SLR检核卫星轨道是通过激光和微波两种观测数据,比较激光测距计算的站星距和微波轨道反算的站星距,其结果直接反映两种不同测量方式的差异[10-11]。
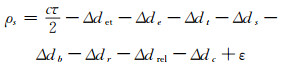
1.1 激光测距原理通过精密测定激光从观测站到卫星激光反射器的往返时间解算两者之间的距离。观测量ρs为测站至卫星距离,其计算公式为[12]:
|
(1) |
式中,c为光速,τ为时间间隔计数器记录的激光脉冲从发射到接收的时间间隔,Δdet为测站位置潮汐位移改正,Δde为测站距离偏差改正,Δdt为测站时间偏差改正,Δds为卫星偏心改正(质心补偿改正),Δdb为地面系统信号延迟,Δdr为大气折射改正(主要考虑对流层延迟改正),Δdrel为广义相对论改正,Δdc为测站板块运动改正,ε为剩余误差。
1.2 微波测量反算站星距原理通过卫星轨道星历提供的坐标位置计算观测站到卫星之间的星地距离ρm,获得微波测量反算的站星距:

|
(2) |
式中,(x, y, z)为GLONASS卫星的位置矢量,(xi, yi, zi)为该测站的位置矢量,Δdet为测站位置潮汐位移改正,Δde为测站距离偏差改正,Δdt为测站时间偏差改正,ε为剩余误差。
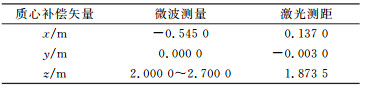
1.3 模型改正在各项误差模型改正中,对流层改正采用Mendes-Pavlis模型[13],地球重力场采用EGM2008相关参数,GLONASS-M卫星质量取1 415 kg[3],其余各项改正与文献[6]中策略相同。利用激光测距计算的星地距是指测站到卫星激光反射器之间的距离,而利用微波测量反算的站星距是指测站到卫星天线相位中心之间的距离。需要指出,在微波测量定轨时,卫星天线相位中心改正是以常量标定给出,其对轨道检核结果存在影响。同时,每颗GLONASS卫星的卫星天线相位中心改正均不同,且两种测量方式的卫星质心补偿矢量也存在差异。表 1列出处理策略中(由ILRS提供)GLONASS卫星质心补偿矢量。其中,激光测距的质心补偿矢量设为固定,微波测量z轴方向的质心补偿常数根据GLONASS卫星的不同而不同。表 2列出2015年时间序列中被检核卫星的基本信息。
|
|
表 1 两种测量的质心补偿矢量 Tab. 1 Centroid compensation vector of two kinds of measurement |
|
|
表 2 SLR检核2015年GLONASS卫星的基本信息 Tab. 2 Basic information of GLONASS satellites by SLR in 2015 |
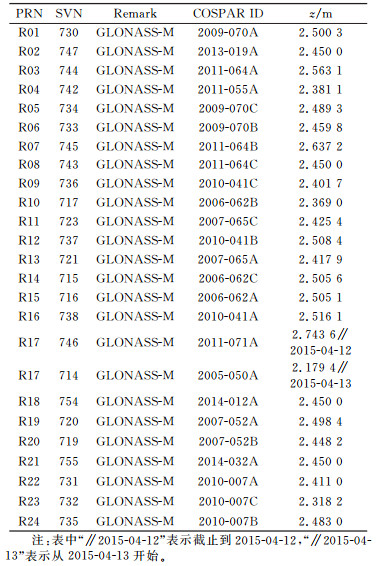
从表 2可知,GLONASS系统星座分3个轨道面,其中R01~R08在第一轨道面,R09~R16在第二轨道面,R17~R24在第三轨道面,利用SLR观测资料检核的所有卫星都是GLONASS-M型卫星。从卫星的国际卫星标识符[14](COSPAR ID)可以知道服役卫星具体的发射年份,例如2009-070A,表示2009年发射的全球第70颗卫星,A表示在该次发射任务中分离出多个部分时用于标识某一部分。
1.4 统计策略对两种测量方式所得站星距求差,得到每一次检核的残差观测量;按照不同卫星的不同观测站对每一天的残差进行统计,给出每天每颗卫星每个观测站所得的残差均值(mean)、均方根值(RMS)以及标准差(STD);最后,按照不同卫星的不同观测站对多天的解算指标进行统计分析。
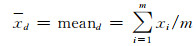
设某观测站观测某颗卫星第d天的观测量为m,任意残差为xi,则第d天的残差均值、均方根值、标准差为:
|
(3) |
|
(4) |

|
(5) |
需要指出,统计多天的各项解算指标是根据每天的各项解算结果按有效观测量的多少加和求平均。对应的公式如下:
|
(6) |
式中,mi为某颗卫星某观测站第i天的有效观测量,X为其第i天的某项解算指标,S为某颗卫星或某观测站或某轨道面或整体多天的统计结果。
2 算例分析选取2015-01-01~2015-12-31 EDC提供的GLONASS卫星(R01~R24)的SLR标准点格式数据,以及对应时间段内CODE提供的GLONASS卫星的最终轨道星历。本文数据处理策略中初设CODE轨道精度为10 cm,按3倍中误差剔除每一天中每颗卫星每个观测站RMS值大于30 cm的观测量。
2.1 GLONASS卫星的检核分析按照GLONASSS卫星的PRN号进行数据分析,获得各卫星、各轨道面以及整体的残差解算指标。由于数据残差解算是以d为时间节点,故RMS散点图中的每个散点代表的是某一天某颗卫星某观测站的RMS值。图 1为每个轨道面上有效观测量排在前两位的卫星的RMS值散点图。表 3为按卫星统计分析的表格。

|
图 1 R02、R03、R09、R12、R18、R21的RMS值散点图 Fig. 1 The RMS scatter diagram of R02, R03, R09, R12, R18, R21 satellites |
|
|
表 3 2015年全年GLONASS卫星SLR检核结果统计 Tab. 3 The validation list of GLONASS satellites using SLR of 2015 full-year |

由图 1和表 3可知,从整体趋势看,图 1中卫星的大部分RMS值都在10 cm以内,说明利用SLR检核CODE提供的GLONASS卫星最终轨道较稳定。R09和R12的RMS相对较离散,说明第二轨道面的检核结果相对较差。
1) 利用SLR检核发现,GLONASS卫星最终轨道产品精度与卫星所在的轨道面有关。在本文策略中,第一轨道面的统计结果最好,有效观测量在3个轨道面内最多,且该轨道面上每颗卫星的mean值、RMS值及STD值均相对稳定。第三轨道面的统计结果次之,第二轨道面的统计结果最差。虽然R07与R16未能计算出结果,但在大量的统计数据下对结论的影响不大。
2) 卫星的新旧对轨道检核有一定影响。较新的卫星有效观测量较多,观测质量也较好。对应表 2中的COSPAR ID可以看出,第一轨道面上的卫星整体都比较新,第三轨道面上的卫星次之,第二轨道面上的卫星较旧。
3) 检核存在一定的系统误差。SLR检核GLONASS卫星并无类似于文献[6]所述的GPS36卫星存在很明显的系统误差,但仍能确定存在一定的系统误差。而文献[8]中各轨道面的残差均值基本为零,估计系统误差与处理策略中先验估计的站坐标有关。除个别卫星外,大部分的GLONASS卫星激光测距都比微波测量最终轨道反算的站星距要短。
4) SLR检核GLONASS卫星的轨道精度总体优于3.3 cm。第一轨道面的整体RMS值为2.49 cm,第二轨道面为4.72 cm,第三轨道面为3.14 cm,所有卫星的整体RMS值为3.28 cm。
5) 文献[15]和[16]均有提到,SLR的观测精度已达到亚cm级。本文利用SLR检核GLONASS卫星所得的观测精度整体优于1.2 cm。每颗GLONASS卫星的STD值基本都在2 cm以内,第一轨道面的整体STD值为0.97 cm,第二轨道面为1.6 cm,第三轨道面为1.04 cm,整体STD值为1.15 cm。
在2015-04-13(年积日为103),R17卫星经历过转换卫星的情况,其转换前后的RMS值散点序列见图 2。可以看出,转换卫星后,R17卫星检核的效果明显变差。对应表 3,有效观测量明显减少,各项检核指标也都变差。通过查阅资料[3],R17卫星在2015-04-13(竖线)进行了更换,转换后的卫星为曾长期服役于同一轨道面上的R23卫星,服役年限也较长。

|
图 2 R17的RMS值 Fig. 2 The RMS scatter diagram of R17 satellite |
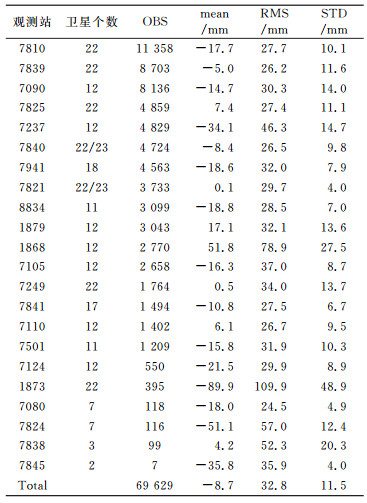
按照SLR观测站来进行统计分析,可以反映各观测站的观测精度及观测站对GLONASS卫星的检核效果。图 3列出有效观测量排在前7位的观测站(对应表 4)的RMS值。

|
图 3 前7个观测站的RMS值 Fig. 3 The RMS scatter diagram of the selected 7 stations |
|
|
表 4 SLR测站检核统计 Tab. 4 The validation list of SLR sites |
选取7839站,并按照不同卫星展出排在各轨道面前两位的卫星(图 4)。从图 4可以看出,纵向散点是因为观测站对多颗卫星观测,而每颗卫星RMS值散点参差不齐。表 4列出按测站的统计分析。

|
图 4 7839站6颗卫星的RMS值 Fig. 4 The RMS scatter diagram of the selected 6 satellites for 7839 site |
从图 3、4和表 4可以看出,从整体上看,由于每个观测站各自的条件不同,RMS值散点分布也各不相同。大部分测站的RMS值散点都分布在5 cm以内(大都在3 cm左右),说明利用SLR检核GLONASS卫星最终轨道有较好的一致性。
在每一天的时间轴上,基本存在明显的纵向散点。结合图 3和表 4可以看出,纵向散点明显的观测站可观测到的卫星个数多。该现象与测站有效观测的卫星个数有关。从测站方面的整体均值看,大部分的检核激光测距比微波轨道反算的站星距要短。
观测效果好的测站主要分布在欧洲。7810(瑞士)、7839(奥地利)、7090(澳大利亚西南)、7825(澳大利亚东南)、7237站(长春)、7840(英国)、7941(意大利)、7821站(上海)、8834(德国)、1879(俄罗斯西部)为对应表 4中的前10个观测站。其中,中国的2个观测站7237站(长春)、7821站(上海)观测水平排在中等;澳大利亚的2个观测站7090(澳大利亚西南)、7825(澳大利亚东南)观测质量也较好;其余的观测站都集中分布在欧洲。
3 结语本文通过利用SLR观测资料对CODE提供的GLONASS卫星的最终轨道进行检核,分别从卫星和测站2个不同的角度对检核进行统计分析。结果表明,在近70 000个有效标准点的统计中,利用SLR检核CODE提供的GLONASS最终轨道精度整体优于3.3 cm,GLONASS卫星的SLR观测精度整体优于1.2 cm。距今更新较近的GLONASS-M卫星检核结果较好,说明SLR测站的观测质量也跟技术的进步密不可分。
致谢: CODE提供了GLONASS轨道数据,EDC提供了SLR数据,在此一并表示感谢!
| [1] |
韩梦泽. 俄罗斯GLONASS系统发展进程研究[J]. 江苏科技信息, 2013(19): 73-74 (Han Mengze. Research on the Development Process of GLONASS System in Russia[J]. Jiangsu Science and Technology Information, 2013(19): 73-74 DOI:10.3969/j.issn.1004-7530.2013.19.041)
(  0) 0) |
| [2] |
赵爽. 2012年俄罗斯GLONASS系统发展及概况[J]. 卫星应用, 2013(2): 21-23 (Zhao Shuang. Development and General Situation of GLONASS System in Russia in 2012[J]. Satellite Application, 2013(2): 21-23)
( 0) |
| [3] |
Dach R, Walser P. Bernese GNSS Software Version 5.2[M]. Astronomical Institute, University of Bern, 2015
( 0) |
| [4] |
刘基余. GLONASS现代化的启迪[J]. 遥测遥控, 2010, 31(5): 1-6 (Liu Jiyu. Some Enlightenment from GLONASS Modernization[J]. Journal of Telemetry Tracking & Command, 2010, 31(5): 1-6 DOI:10.3969/j.issn.2095-1000.2010.05.001)
( 0) |
| [5] |
Urschl C, Beutler G, Gurtner W, et al. Contribution of SLR Tracking Data to GNSS Orbit Determination[J]. Advances in Space Research, 2007, 39(10): 1515-1523 DOI:10.1016/j.asr.2007.01.038
( 0) |
| [6] |
Yang H L, Xu T H, Sun D W.Validation of GPS36 Satellite CODE Precise Orbit with SLR Measurements[C]. China Satellite Navigation Conference (CSNC) 2016, Changsha, 2016
( 0) |
| [7] |
Urschl C, Gurtner W, Hugentobler U, et al. Validation of GNSS Orbits Using SLR Observations[J]. Advances in Space Research, 2005, 36(3): 412-417 DOI:10.1016/j.asr.2005.03.021
( 0) |
| [8] |
So nica K, Thaller D, Dach R, et al. Satellite Laser Ranging to GPS and GLONASS[J]. Journal of Geodesy, 2015, 89(7): 725-743 DOI:10.1007/s00190-015-0810-8
( 0) |
| [9] |
Ricklefs R L, Moore C J. Consolidated Laser Ranging Data Format (CRD)[R].International Laser Ranging Service, 2009
( 0) |
| [10] |
徐天河, 杨元喜. VLBI, SLR, GPS综合数据处理方案研究[J]. 测绘工程, 2002, 11(4): 7-10 (Xu Tianhe, Yang Yuanxi. The Research on the Schemes of Combination Adjustment of VLBI, SLR and GPS Data[J]. Engineering of Surveying & Mapping, 2002, 11(4): 7-10 DOI:10.3969/j.issn.1006-7949.2002.04.002)
( 0) |
| [11] |
瞿锋, 王谭强, 陈现军, 等. GPS35卫星的SLR轨道与IGS轨道的联合比较[J]. 测绘通报, 2003, 32(3): 224-228 (Qu Feng, Wang Tanqiang, Chen Xianjun, et al. Precise Orbit Determination of GPS35 Satellite Using SLR Data[J]. Bulletin of Surveying and Mapping, 2003, 32(3): 224-228)
( 0) |
| [12] |
李征航, 魏二虎, 王正涛. 空间大地测量学[M]. 武汉: 武汉大学出版社, 2010 (Li Zhenghang, Wei Erhu, Wang Zhengtao. Space Geodesy[M]. Wuhan: Wuhan University Press, 2010)
( 0) |
| [13] |
Mendes V B, Pavlis E C. High-Accuracy Zenith Delay Prediction at Optical Wave-Lengths[J]. Geophysical Research Letters, 2004, 31(14): 189-207
( 0) |
| [14] | |
| [15] |
Pearlman M R, Degnan J J, Bosworth J M. The International Laser Ranging Service[J]. Advances in Space Research, 2002, 30(2): 135-143 DOI:10.1016/S0273-1177(02)00277-6
( 0) |
| [16] |
Qin X, Yang Y. Evaluation of CHAMP Satellite Orbit with SLR Measurements[J]. Geo-Spatial Information Science, 2005, 8(3): 209-213
( 0) |
2. Institute of Space Science, Shandong University, 180 West-Wenhua Road, Weihai 264209, China;
3. State Key Laboratory of Geo-Information Engineering, 1 Mid-Yanta Road, Xi'an 710054, China