 2017, Vol. 37
2017, Vol. 37


2. 北斗导航应用技术河南省协同创新中心,郑州市科学大道62号,450001;
3. 成都信息工程大学大气探测重点实验室,成都市学府路一段24号,610225
精密单点定位技术需要高精度的卫星钟差作为保障,这是因为,若采用广播星历钟差参数,其卫星钟差精度在3~5 ns[1],将造成1~1.5 m的测距误差,故欲满足优于10 cm的测距误差,卫星钟差精度应优于0.3 ns。实时精密单点定位技术对卫星钟差实效性有更高的要求,卫星钟差的实时解算已成为该领域的一个重要研究热点。目前,卫星钟差实时解算的方法一般先固定卫星轨道(预报轨道产品)和跟踪站坐标,采用非差法或历元差分法来对卫星钟差进行参数估计。历元差分法配合初始钟差才能恢复绝对钟差[2],但解算效率高;非差法解算精度高,但解算时间长[3]。综合两种方法,即用非差法得到高精度的慢更新率钟差,历元差分得到高精度的历元间差,理论上二者之和即可恢复各历元的绝对卫星钟差。非差法得到的卫星钟差更新越快,所恢复的卫星钟差精度越高,因此有必要研究基于非差法的卫星钟差快速解算方法。目前,非差法采用的参数估计方法主要是卡尔曼滤波。卡尔曼滤波经过一段时间后可以逐步收敛模糊度参数,从而提高卫星钟差参数估计的精度,但若周跳探测不准确或计算的舍入误差累积,易导致滤波发散。前者一般通过多种周跳探测方法弥补,后者可通过平方根滤波(SRIF)来改善数值计算的稳定性。滤波过程最耗时的是增益矩阵的计算,原因在于对高阶矩阵的求逆。在参数估计方法中,若更新的量测信号为一维向量,则在序贯算法中,矩阵求逆运算变成数的求倒计算[4],避免了对矩阵的直接求逆,可提高计算效率。基于该种方式,本文设计一种类似序贯算法的平方根滤波过程,并应用于卫星钟差的实时解算。
1 基于非差法的卫星钟差确定原理在观测方程中,卫星位置和跟踪站坐标可事先准确确定:卫星位置可通过超快速预报轨道内插固定,跟踪站坐标可通过IGS发布的SINEX周解文件固定[5]。
1.1 非差法观测模型载波相位和伪距观测量的原始观测方程如下:
|
(1) |
式中,Lrs、Prs分别表示跟踪站r对卫星s的载波相位和伪距观测值,ρrs表示跟踪站至卫星的几何距离,dtr为接收机钟差,dts为卫星钟差,c为光速,f为载波频率,Nrs为模糊度,dtroprs为对流层延迟,dionrs为电离层延迟,dpathrs为多路径效应,εrϕs、εrPs分别为载波相位和伪距观测噪声。
由式(1)可见,原始观测方程包括难以用模型消除的电离层延迟误差,采用消电离层组合观测量、载波相位和伪距的公式如下:

|
(2) |
式中,Lc、Pc分别为消电离层载波相位及伪距组合观测值,f1、f2分别为双频载波频率,L、P分别为载波相位及伪距观测值。消电离层组合观测值虽消掉了电离层影响,但观测噪声却放大3倍,模糊度也不再是整数,需要较长时间来固定模糊度参数[6]。
1.2 数据预处理在利用载波观测量进行非差法数据处理时,需进行周跳探测和粗差剔除。本文综合利用MW法和电离层残差法进行周跳探测和粗差剔除,它们分别基于宽巷模糊度和电离层残差的变化特点来探测周跳。
MW组合观测方程如下:
|
(3) |
式中,Nw为宽巷模糊度,λw为宽巷波长。MW组合几乎消除了所有的观测误差,仅受观测噪声和多路径的影响[6],可通过多历元观测平滑减弱或消除。
电离层残差法基本公式如下:
|
(4) |
式中,A为与电离层电子密度相关的参数,电离层残差组合与接收机至卫星的几何距离无关,同时消除与频率无关的误差,仅包含电离层影响和整周模糊度与频率相关的误差[7]。若未发生周跳,电离层影响变化缓慢,适用于粗差剔除、周跳探测和修复。
2 基于序贯算法的平方根滤波原理影响非差法卫星钟差解算精度的重要参数是模糊度。当模糊度固定时,会明显提高钟差估计的精度,而单历元实时解算无法一次固定模糊度。卡尔曼滤波充分利用参数的先验信息和当前观测信息对待估参数不断预测和修正,经过一段时间后,模糊度得到收敛。卡尔曼滤波过程最耗时的是对增益矩阵的计算,且计算中的舍入误差积累会引起滤波发散。综合两种因素,采用序贯算法来实现平方根滤波。
设n阶方阵P为非负定阵,且其Cholesky因式分解满足如下条件:

|
(5) |
式中,称Δ为P的平方根,Δ为非零的下三角阵[8]。以这种平方根的形式传递均方误差阵Pk和一步预测均方误差阵Pk/k-1信息,分别设为Δk和Δk/k-1。钟差观测方程中的观测量可认为相互独立,则量测噪声方差阵为对角阵Rk。此时,基于序贯算法的平方根滤波可描述如下。设

|
(6) |

|
(7) |
其中,
|
(8) |
对于j=1, 2, …, m,迭代计算为:
|
(9) |
当j=m时,即得到k时刻的量测更新结果:

|
(10) |
式中,Hkj为k时刻系数矩阵Hk的第j行向量,F为状态转移阵,Q为过程噪声方差阵,P为先验协方差阵。
由迭代过程(9)中第2、3式可知,求逆过程仅对数字操作,避免对矩阵直接求逆,极大地节省了计算时长。同时,在数值计算中,计算Δk和Δk/k-1的字长只需计算Pk和Pk/k-1字长的一半,就可达到同样的精度[8]。
3 数据处理策略由于卫星测量得到的是相对钟差,单纯解算钟差无意义且法方程秩亏,故需先固定一个基准钟,再求解相对于该基准钟的相对钟差。本文以一个稳定的测站钟为基准。求解所有的卫星钟差参数需要全球选站,但若选站过多,解算效率低,且精度并无质的提高。本文在全球均匀选取20个IGS跟踪站(图 1)。

|
图 1 选用的20个IGS站的分布 Fig. 1 Distribution of twenty IGS stations |
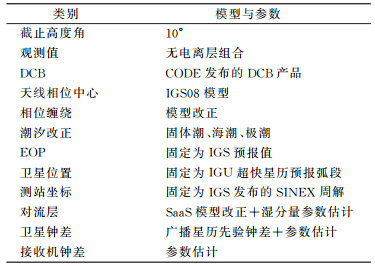
精密卫星钟差解算数据处理过程需进行参数控制及模型选择,一类与观测相关,另一类与力学相关。对流层干延迟用模型改正,并对湿延迟进行参数估计,卫星钟差和接收机钟差均作为白噪声估计。详细的参数配置[9-11]如表 1所示。
|
|
表 1 参数配置 Tab. 1 Observation model |
对数据先进行预处理。本文主要利用MW法和电离层残差法组合探测周跳和剔除粗差,卫星钟差实时解算流程如图 2所示。

|
图 2 卫星钟差实时解算数据处理流程 Fig. 2 Data processing flow chart of real time satellite clock offset determination |
根据§3卫星钟差实时解算策略,选用IGS跟踪站2016年第120~126天共7 d观测数据进行钟差解算,采样率为30 s。精度评估参考IGS公布的最终钟差产品。由于所选钟差基准不同,故需先消去基准钟差偏差才能真实反映卫星钟差精度。评估方式采用均方根(RMS)和标准差(STD)[12]。对每颗卫星钟差统计STD后,再对所有卫星钟差精度计算RMS,并作为钟差整体的解算精度(统计收敛后的卫星钟差二次差值)。
本文主要利用改进的平方根滤波算法同传统卡尔曼滤波算法进行卫星钟差实时解算比较(传统卡尔曼滤波与常规平方根滤波传递的矩阵维度一致,计算量相当,故未与常规平方根滤波进行比较),分别就解算时间、解算精度进行统计分析(以G01星为基准星)。由图 3可看出,两种算法解算精度相当。图 4为两种方法单历元平均解算时间的比较,可以看出,改进的平方根滤波算法计算时长明显少于传统卡尔曼滤波算法,计算时间减少40%左右。图 5给出基于改进的平方根滤波算法解算卫星钟差的精度最大、最小、平均值分布。

|
图 3 两种方法卫星钟差解算精度统计 Fig. 3 Accuracy of two methods of satellite clock offset calculation |

|
图 4 两种方法单历元平均解算时间统计 Fig. 4 The average calculation time of two methods for single epoch |

|
图 5 基于平方根滤波法的钟差精度最大、最小、平均值分布 Fig. 5 The maximum, minimum, average of clock offset accuracy based on the square root filter |
综上结果可看出,基于序贯算法的平方根滤波算法,卫星钟差实时解算精度整体优于0.25 ns,绝大多数条件下均能优于0.2 ns,虽在精度上没有明显提升,但计算时长明显减少,适合于实时应用。
5 结语基于序贯算法的平方根滤波器,可以避免对高维矩阵直接求逆,提升了计算效率,计算时长比传统卡尔曼滤波算法缩短40%,在卫星钟差实时解算中,基本可以保证优于0.2 ns的相对卫星钟差精度,满足实时高精度定位的需求。
致谢: 感谢信息工程大学iGMAS分析中心提供数据!
| [1] |
李征航, 丁文武, 李昭. GPS广播星历的轨道误差分析[J]. 大地测量与地球动力学, 2008, 28(1): 50-54 (Li Zhenghang, Ding Wenwu, Li Zhao. Error Analysis of Orbit Determined by GPS Broadcast Ephemeris[J]. Journal of Geodesy and Geodynamics, 2008, 28(1): 50-54)
(  0) 0) |
| [2] |
赵齐乐, 戴志强, 王广兴, 等. 利用非差观测量估计北斗卫星实时精密钟差[J]. 武汉大学学报:信息科学版, 2016, 41(5): 686-690 (Zhao Qile, Dai Zhiqiang, Wang Guangxing, et al. Real-Time Precise BDS Clock Estimation with the Undifferenced Observation[J]. Geomatics and Information Science of Wuhan University, 2016, 41(5): 686-690)
( 0) |
| [3] |
何明宪, 李星星, 李盼. 基于非差与历元差分两种观测模型估计精密卫星钟差的方法比较[J]. 大地测量与地球动力学, 2011, 31(1): 95-99 (He Mingxian, Li Xingxing, Li Pan. Comparison and Analysis of Estimations of Precise Satellite Clock Error Based on Non-Difference Model and Epoch Differential Model[J]. Journal of Geodesy and Geodynamics, 2011, 31(1): 95-99)
( 0) |
| [4] |
隋立芬, 宋力杰, 柴洪洲. 误差理论与测量平差基础[M]. 北京: 测绘出版社, 2010 (Sui Lifen, Song Lijie, Chai Hongzhou. The Basis of Error Theory and Surveying Adjustment[M]. Beijing: Surveying and Mapping Press, 2010)
( 0) |
| [5] |
李黎, 匡翠林, 朱建军, 等. 基于IGU预报轨道实时估计精密卫星钟差[J]. 大地测量与地球动力学, 2011, 31(2): 111-116 (Li Li, Kuang Cuilin, Zhu Jianjun. Real-Time Estimation of Precise Satellites Clock Bias Based on IGU Predicted Orbit[J]. Journal of Geodesy and Geodynamics, 2011, 31(2): 111-116)
( 0) |
| [6] |
许国昌. GPS理论、算法与应用[M]. 北京: 清华大学出版社, 2012 (Xu Guochang. GPS Theroy, Algorithms and Applications[M]. Beijing: Tsinghua University Press, 2012)
( 0) |
| [7] |
陈品馨, 章传银, 黄昆学. 用相位减伪距法和电离层残差法探测和修复周跳[J]. 大地测量与地球动力学, 2010, 30(2): 120-124 (Chen Pinxin, Zhang Chuanyin, Huang Kunxue. Cycle Slips Detecting and Repairing by use of Phase Reduce Pseudorange Law and Ionized Layer Remnant Method of Difference[J]. Journal of Geodesy and Geodynamics, 2010, 30(2): 120-124)
( 0) |
| [8] |
张国良, 曾静. 组合导航原理与技术[M]. 西安: 西安交通大学出版社, 2008 (Zhang Guoliang, Zeng Jing. Combined Navigation Principle and Application[M]. Xi'an: Xi'an Jiaotong University Press, 2008)
( 0) |
| [9] |
宋伟伟.导航卫星实时精密钟差确定及实时精密单点定位理论方法研究[D].武汉: 武汉大学, 2011 (Song Weiwei. Research on Real-Time Clock Offset Determination and Real-Time Precise Point Positioning[D]. Wuhan: Wuhan University, 2011) http://cdmd.cnki.com.cn/Article/CDMD-10486-1011403756.htm
( 0) |
| [10] |
潘宗鹏, 蔡洪洲, 董冰泉. 实时GPS精密卫星钟差估计及实时精密单点定位[J]. 海洋测绘, 2015, 35(5): 12-15 (Pan Zongpeng, Cai Hongzhou, Dong Bingquan. Real-Time GPS Precise Satellite Clock Error Estimation and Precise Point Positioning[J]. Hydrographic Surveying and Charting, 2015, 35(5): 12-15 DOI:10.3969/j.issn.1671-3044.2015.05.003)
( 0) |
| [11] |
李星星, 徐运, 王磊. 非差导航卫星实时/事后精密钟差估计[J]. 武汉大学学报:信息科学版, 2010, 35(6): 661-664 (Li Xingxing, Xu Yun, Wang Lei. Undifferenced Precise Satellite Clock Error Estimation and Precision Analysis[J]. Geomatics and Information Science of Wuhan University, 2010, 35(6): 661-664)
( 0) |
| [12] |
于合理, 郝金明, 刘伟平, 等. 一种卫星钟差精度评估方法[J]. 海洋测绘, 2014, 34(2): 11-13 (Yu Heli, Hao Jinming, Liu Weiping, et al. Method of Accuracy Assessment of Satellite Clock Error[J]. Hydrographic Surveying and Charting, 2014, 34(2): 11-13 DOI:10.3969/j.issn.1671-3044.2014.02.003)
( 0) |
2. Beidou Navigation Technology Collaborative Center of Henan, 62 Kexue Road, Zhengzhou 450001, China;
3. Key Laboratory of Atmospheric Detection, Chendu University of Information Technology, 24 1st Segment of Xuefu Road, Chengdu 610225, China