 2017, Vol. 37
2017, Vol. 37


2. 中国科学院上海天文台,上海市南丹路80号,200030
在利用连续GPS观测网数据研究地壳运动时,GPS数据处理得到的测站坐标时间序列往往需要表达成某个框架下的结果,如ITRF2014。采用同样的GPS网观测数据,选取不同的参考框架得到的结果往往是有差异的,这种差异有时会决定能否准确识别数据中所包含的某些有用信息。黄立人等[1]通过模拟计算表明,框架站的几何分布会对测站坐标时间序列产生很大影响,并给出了框架站选取的一般原则。秘金钟等[2]进一步细化了IGS框架站的选取原则。张风霜等[3]从坐标时序位移单天误差、坐标重复率等方面讨论了不同参考框架对GPS数据解算的影响,针对小区域形变监测网提出框架点的选择方案。丁晓光等[4]探讨在全球框架与区域框架下估计测站坐标和速度场存在的差异,并提出分级建立参考框架的方案。本文基于CMONOC连续GPS观测站数据,选取不同参考框架和坐标转换模型,从速度场、周期项、坐标残差RMS等方面分析参考框架的影响。
1 参考框架选取方案为考察不同参考框架,尤其是参考框架的空间分布尺度对数据处理的影响,本文给出3种参考框架站选取方案:第一种方案选取全球分布的133个IGS站,构成全球框架站网络(图 1),这些站点要求数据连续性好,至少有3 a或以上高精度观测数据,空间分布尽可能均匀。第二种方案选取中国境内及周边共52个IGS站(图 2区域框架A。图中,空心三角点加实心三角点:区域框架A;空心三角点:区域框架B;圆形点:CMONOC站点)。第三种方案选取仅包含中国境内的11个IGS站(图 2区域框架B)。

|
图 1 全球框架站网络 Fig. 1 Distribution of global reference frame stations |

|
图 2 区域框架网络及CMONOC站点 Fig. 2 Distribution of regional reference frame stations and CMONOC stations |
首先利用Bernese5.2软件的PPP工具解算测站的单日解近似坐标,在此基础上利用RNX2SNX脚本实现测站坐标的双差单日框架解解算,获得各测站的坐标变化时间序列。Bernese5.2数据处理中选用观测值双差无电离层组合来构建最小二乘平差的误差方程;对流层延迟部分以干延迟和湿延迟两部分表达,其中干延迟部分选用DRY-GMF模型可以改正近90%以上的对流层延迟量,湿延迟部分则基于GMF模型作为参数估计的一部分;双差相位模糊度选用组合MW/L3、L5/L3、QIF以及L1/L2等多种策略,平均可以固定80%左右的模糊度。此外,数据解算中统一采用IGS提供的接收机和卫星天线相位改正模型,以及FES2004海潮模型等。最后,利用HELMERT变换将整体测网绑定至指定的参考框架上。
2.2 坐标转换七参数(平移、旋转、尺度)变换模型为:
|
(1) |
六参数(平移、旋转)变换模型为:
|
(2) |
式中,(X, Y, Z)为转换前坐标,(X′, Y′, Z′)为转换后坐标,(ΔX, ΔY, ΔZ)为3个平移参数,(εX, εY, εZ)为3个旋转参数,k为尺度参数。
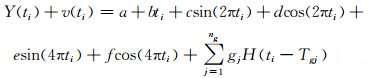
2.3 速度场拟合对测站坐标时间序列进行最小二乘拟合,获取测站速度、季节项、阶跃项等信息[5]:
|
(3) |
式中,ti为GPS站点单日历元(以a为单位的浮点数),Y为测站坐标分量,v为坐标残差,H为Heaviside阶梯函数,a为站点起始坐标分量,b为线速度,c和d组合表示全年周期项,e和f组合表示半年周期项,最后一项表示发生在历元Tgj处、大小为gj的ng个位移阶跃项。
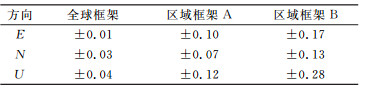
3 结果分析 3.1 速度场从表 1可以看出(单位:mm/a),在采用全球框架时两种坐标转换模型得到的速度场差异是最小的,在N、E、U 3个方向的速度分量差异均方差分别为0.03 mm/a、0.01 mm/a、0.04 mm/a,而采用框架A和B时在3个方向的速度分量差异明显增大,选择的框架站覆盖的区域越小,差异越大。因此,可以认为全球框架网坐标解更稳定。图 3(上排:六参数转换,下排:七参数转换,左列:全球框架,中列:区域框架A,右列:区域框架B)显示了不同方案下的水平速度场,可以看出,各方案下的水平速度场整体空间分布体现出较好的一致性。从图 4(上排:全球框架对区域框架A,下排:全球框架对区域框架B,左列:六参数转换,右列:七参数转换)来看,在水平速度场方面,无论使用六参数或七参数转换,区域框架B与全球框架的差异大于区域框架A与全球框架的差异,与文献[7]研究结果一致。如表 2所示(单位:mm/a),选用六参数时前者平均水平速度场之差为0.46 mm/a,后者为0.20 mm/a;七参数时则分别为0.54 mm/a和0.23 mm/a。但相较于速度场的大小,这些都属于微小差异,在大小上存在区域渐变特征,在方向上呈现出一致性的趋向。而垂向速度场则没有体现出类似的明显特征,仅受平移和尺度参数(仅七参数时)的影响[6],区域框架相较于全球框架,垂向速度场之差在一些区域会得到放大,而在另一些区域被缩小,需分区域讨论。
|
|
表 1 六参数转换和七参数转换下得到的速度场差异均方差 Tab. 1 Standard deviations of the differences between the velocity fields transformed by six-parameter model and seven-parameter model |

|
图 3 不同方案下的水平速度场 Fig. 3 Velocity fileds under different schemes |

|
图 4 不同方案在水平速度场上的差异 Fig. 4 Differences between the horizontal velocity fields under different schemes |
|
|
表 2 全球框架和区域框架下得到的速度场差异均值和均方差 Tab. 2 Mean values and standard deviations of the differences between the velocity fields under global and regional reference frame |
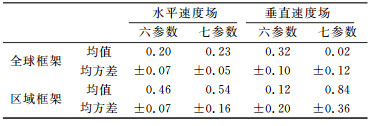
表 3给出在不同框架方案下得到的测站年周期项的平均振幅(单位:mm),垂直方向明显大于水平方向。在水平方向,无论采用六参数转换或七参数转换,各方案之间的差异都较小,仅仅在六参数转换下选用区域框架B时E方向的平均振幅相对较大一些。在垂向,无论采用六参数转换或七参数转换,各方案之间的差异相对较大。需要指出的是,使用六参数转换时,区域框架下得到的垂向平均振幅均小于全球框架下的结果,分别减少19.6%(区域框架A)和28.5%(区域框架B),而使用七参数转换时结果正好相反,分别增加26.4%(区域框架A)和16.5%(区域框架B)。
|
|
表 3 年周期项平均振幅及其均方差 Tab. 3 Mean amplitudes and standard deviations of the annual terms |

图 5(上排:六参数转换,下排:七参数转换,左列:全球框架,中列:区域框架A,右列:区域框架B;箭头长度表示振幅,箭头方向表示初相,指向北、东、南、西,依次表示正极值发生在0.0 a、0.25 a、0.5 a、0.75 a)分别给出了在不同框架方案下得到的垂向年周期项空间分布。可以看出,使用七参数转换时,不同框架选取方案得到的垂向年周期振幅离散度都比较小,各点的垂向年周期信号在坐标转换时由于引入尺度参数而被平滑;而六参数转换下区域框架得到的垂向年周期振幅在一些区域较微弱,而在另一些区域则保留了较强的振幅水平,如川滇西部、青藏高原西南部以及新疆北部,可能由气压、土壤水、积雪等有年周期特性的非构造形变引起[7-9]。因此,六参数模型更能体现局部变化信息。

|
图 5 不同方案得到的垂向年周期项分布 Fig. 5 Distribution of the vertical annual terms under different schemes |
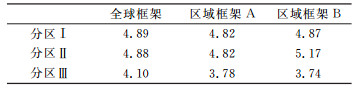
图 6(箭头朝上表示区域框架下RMS值高于全球框架;左列:六参数转换,右列:七参数转换,上排:区域框架A对全球框架,下排:区域框架B对区域框架)显示六参数和七参数转换模型得到的全球与区域框架下坐标序列在垂向的最小二乘拟合残差的均方根(RMS)差异。结合表 4可以看出,在选用七参数转换时,区域框架A相较于全球框架在垂向坐标拟合残差RMS值虽有降低,但降幅很小,平均仅为0.7%;区域框架B相较于全球框架在垂向坐标拟合残差RMS值则大幅提高,平均提高达10.7%。而在选用六参数转换时,不论区域框架A还是B相较于全球框架在多数站点的垂向坐标拟合残差RMS值都有所降低,平均降低分别为4.5%和2.2%。从表 4还能发现,七参数转换下无论采用哪种框架,残差RMS均值水平都高于六参数转换,且框架覆盖范围越小差异越大,反映六参数转换得到的测站坐标时间序列自洽性更好。此外,六参数转换下区域框架与全球框架得到的垂向坐标拟合残差RMS值之差呈现出明显的区域分布特征。依据中国大陆活动块体模型[10],将观测区域粗略分成3块,华南块体记为分区Ⅰ;川滇西部及青藏高原大部记为分区Ⅱ;剩下的区域记为分区Ⅲ,如图 6的左列所示。表 5列出3个分区内测站拟合残差均方根的平均值,可以看出,在分区Ⅲ中区域框架B的垂向坐标拟合残差RMS均值最小,较全球框架降低了8.78%,但在地壳活动较为活跃的分区Ⅱ中,区域框架B的垂向坐标拟合残差RMS均值最大,较全球框架提高5.94%。这可能是由于该区域观测值包含较大的噪声,也可能含有一些未被分离的信号成分,需要进一步研究。

|
图 6 不同方案测站垂向坐标拟合残差RMS值差异 Fig. 6 Differences of the RMS of the vertical residual time series between different schemes |
|
|
表 4 垂向坐标拟合残差RMS平均值 Tab. 4 Mean RMS of the vertical residual time series |

|
|
表 5 分区六参数垂向坐标拟合残差RMS平均值 Tab. 5 Mean RMS of the vertical residual time series in zone under six-parameter transformation |
1) 与区域框架相比,全球框架网下得到的坐标解更稳定,受不同参数转换模型的影响更小。全球框架与区域框架在水平速度场上存在类似系统性的偏差,且区域框架覆盖的地域越小,偏差越大。
2) 在垂向年周期项的讨论中发现,七参数转换得到的3种框架下的结果都受到不同程度的平滑作用。因此,在利用连续GPS观测网数据研究垂向年周期成分时,采用六参数相似变换进行坐标转换是更好的选择。
3) 在对年周期项、垂向坐标拟合残差RMS进行讨论中发现,区域框架反映出更显著的区域变化特征。六参数估计的区域框架垂向拟合残差RMS相对全球框架整体减小,且呈现区域分布特征,部分地区减小幅度显著,而部分地区有所增加,因此需要分区域进行讨论。
| [1] |
黄立人, 马青. 参考框架的一致性及其对形变分析的影响[J]. 地壳形变与地震, 2001, 21(2): 31-36 (Huang Liren, Ma Qing. Consistency of Reference Frame and Its Influence on Deformation Analysis[J]. Crustal Deformation and Earthquake, 2001, 21(2): 31-36 DOI:10.3969/j.issn.1671-5942.2001.02.005)
(  0) 0) |
| [2] |
秘金钟, 蒋志浩, 张鹏, 等. IGS跟踪站与国内跟踪站联合处理的框架点选择研究[J]. 武汉大学学报:信息科学版, 2007, 32(8): 704-706 (Bei Jinzhong, Jiang Zhihao, Zhang Peng, et al. On Frame Work Sites Selection for Unite-Processing of IGS CORS and Domestic CORS[J]. Geomatics and Information Science of Wuhan University, 2007, 32(8): 704-706)
( 0) |
| [3] |
张风霜, 杨国华. GPS连续观测资料不同方案计算结果对比分析[J]. 测绘科学, 2011, 36(2): 20-23 (Zhang Fengshuang, Yang Guohua. Comparative Analysis and Related Discussion about Different Calculation Schemes Results of GPS Continuous Observation Data[J]. Science of Surveying and Mapping, 2011, 36(2): 20-23)
( 0) |
| [4] |
丁晓光, 占伟, 王紫燕, 等. 不同参考框架对区域连续GPS数据解算的影响[J]. 大地测量与地球动力学, 2014, 34(2): 161-164 (Ding Xiaoguang, Zhan Wei, Wang Ziyan, et al. Influence on Results Calculated for Regional GPS Continuous Data with Different Reference Frames[J]. Journal of Geodesy and Geodynamics, 2014, 34(2): 161-164)
( 0) |
| [5] |
Nikolaidis R. Observation of Geodeticand Seismic Deformation with the Global Positioning System[D].San Diego: University of California, 2002 http://www.mendeley.com/catalog/observation-geodetic-seismic-deformation-global-positioning-system/
( 0) |
| [6] |
Legrand J, Bergeot N, Bruyninx C, et al. Impact of Regional Reference Frame Definition on Geodynamic Interpretations[J]. Journal of Geodynamics, 2010, 49(3): 116-122
( 0) |
| [7] |
王敏, 沈正康, 董大南. 非构造形变对GPS连续站位置时间序列的影响和修正[J]. 地球物理学报, 2005, 48(5): 1 045-1 052 (Wang Min, Shen Zhengkang, Dong Danan. Effects of Non-Tetonic Crustal Deformation on Continuous GPS Position Time Series and Correction to Them[J]. Chinese Journal of Geophysics, 2005, 48(5): 1 045-1 052)
( 0) |
| [8] |
朱良玉, 王庆良, 蒋锋云, 等. 非构造形变对区域网GPS垂直形变的影响[J]. 测绘科学, 2014, 39(9): 49-53 (Zhu Liangyu, Wang Qingliang, Jiang Fengyun, et al. Effects of Non-Tectonic Crustal Deformation on Vertical Velocity of Network GPS in China[J]. Science of Surveying and Mapping, 2014, 39(9): 49-53)
( 0) |
| [9] |
梁洪宝, 刘志广, 黄立人, 等. 非构造形变对中国大陆GNSS基准站垂向周期运动的影响[J]. 大地测量与地球动力学, 2015, 35(4): 589-593 (Liang Hongbao, Liu Zhiguang, Huang Liren, et al. Effects of Non-Tectonic Deformation on the Vertical Periodic Motion of GNSS Reference Stations on China[J]. Journal of Geodesy and Geodynamics, 2015, 35(4): 589-593)
( 0) |
| [10] |
王敏, 沈正康, 牛之俊, 等. 现今中国大陆地壳运动与活动块体模型[J]. 中国科学:D辑, 2003, 33(增1): 21-32 (Wang Min, Shen Zhengkang, Niu Zhijun, et al. Present-Day Crustal Movement of Chinese Mainland and Active Block Model[J]. Science in China Series D, 2003, 33(S1): 21-32)
( 0) |
2. Shanghai Astronomical Observatory, CAS, 80 Nandan Road, Shanghai 200030, China