 2017, Vol. 37
2017, Vol. 37



2. 武汉市测绘研究院,武汉市万松园路209号,430022
精密单点定位技术(precise point positioning,PPP)克服了传统差分模式受地面参考站分布、距离等因素的束缚,在诸多领域有着广泛的应用前景[1-3]。随着PPP技术和网络技术的迅猛发展, 国内外已经有不少科研机构相继研发出高精度的PPP处理软件,如P3、PANDA、BERNESE等;以及免费的在线服务系统,如AUSPOS、APPS、GAPS、CSRS-PPP和Magic-PPP等[4-6]。然而,由于上述软件及在线服务代码均不对用户开放,使得用户无法根据自己的应用需求制定及完善相关功能,限制了PPP技术的应用。因此,研发、运用开源高精度定位处理软件,对相关方向的科学研究及工程应用具有重要的价值和意义。目前,广泛使用的开源软件有RTKLIB、gLAB和G-NUT,且现已有相关文献对其定位性能进行初步分析。文献[7]采用静态精密单点定位的模式对RTKLIB软件进行分析,结果表明,采用事后星历和快速星历的坐标精度差异在4 cm左右,满足一般精度要求的工程需要;文献[8]利用gLAB精密单点定位软件,对POL2测站2012-11-30的实测数据进行静态和静态模拟动态处理,得出该软件的静态精密单点定位的精度可以达cm~mm,动态定位结果能够达到dm~cm。然而,基于G-NUT的研究较少,且针对这3种软件解算得到的PPP的动态坐标以及对流层精度,未有相关文献对此作出系统性的对比分析。因此,本文采用RTKLIB、gLAB和G-NUT 3款软件进行动态PPP解算,评估其坐标和对流层解算精度。
1 相关软件介绍RTKLIB是日本东京海洋大学开发的一款用于GNSS精密定位的开源程序包,支持GPS、GLONASS、BDS、Galileo等多个GNSS系统的精密PPP解算,也支持动态、静态等多种GNSS实时和事后处理定位模式。此外,RTKLIB能较好地兼容多种GNSS标准格式和协议、GNSS接收机专有数据协议格式和一些外部通信,能够满足实时PPP应用需求[9]。同时,RTKLIB具有强大的图形输出功能,可对原始观测数据卫星可见性、卫星天空视图、DOP值、多路径及卫星高度角进行图形化显示,为质量分析提供了可视化条件[10]。
gLAB由西班牙加泰罗尼亚科技大学的天文与测量研究组联合开发,是能够在Linux和Windows操作系统上运行的GNSS数据处理与分析软件包。当前gLAB的2.0版本仅能处理GPS观测数据,但在后续发布的版本中,它将对Galileo、GLONASS、EGNOS等系统的数据进行兼容性处理[11-12],以扩大软件的用途。
G-NUT是由GOP机构于2011年开发的一套可以满足各种终端用户需求的面向对象并且支持多线程处理的多功能软件库。目前,G-NUT支持所有可用的全球导航卫星系统,如GPS、GLONASS、Galileo和BDS等的PPP解算,且支持最小二乘估计、卡尔曼滤波、均方根信息滤波等多种参数估计模型[13]。
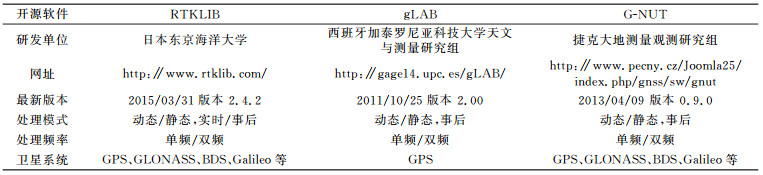
由于3款开源软件处于不断更新中,表 1列出了各个软件的官方网址以及本文解算所选用的软件版本,读者可以根据需求选取不同的版本进行研究。
|
|
表 1 RTKLIB、gLAB、G-NUT 3种软件的主要特征 Tab. 1 Main features of RTKLIB, gLAB and G-NUT |
选取2015-02-28(年积日DOY 118)全球范围内分布的76个IGS跟踪站的观测数据进行分析,图 1给出实验所用不同纬度的测站位置分布。数据采样间隔为30 s,精密星历和钟差分别采用从IGS分析中心下载的对应时段的事后精密星历文件和30 s采样率的卫星钟差文件,分别使用RTKLIB、gLAB和G-NUT 3个开源软件进行事后静态模拟准实时动态PPP数据解算,即采用正向滤波方法且程序设置为动态解算模式。分别统计不同软件解算PPP的对流层估计精度、收敛时间以及收敛后的坐标精度。为了避免卫星轨道外推导致解算精度下降,剔除最后30 min的解算结果。

|
图 1 所选用的76个IGS站的地理分布 Fig. 1 Geographical location of 76 IGS stations used in this study |
为了评价不同软件实时对流层估值的外符合精度,将解算得到的天顶对流层延迟(ZTD)与IGS提供的对流层延迟产品进行对比。由于观测文件采样率为30 s,而IGS提供的ZTD采样间隔为5 min,我们对解算得到的30 s对流层估值进行重采样。本文分别统计了每个测站对流层延迟误差序列的标准差(STD),并综合所有测站对流层误差统计其STD。
图 2给出了每个测站采用不同软件解算得到的天顶对流层估值的STD统计。结果显示,大部分测站对流层估值的中误差优于3.0 cm,而测站PETS(测站编号56)和TWTF(测站编号66)由G-NUT解算得到的对流层估值精度稍差。

|
图 2 3种开源软件动态处理模式解算的天顶对流层延迟的标准偏差(STD) Fig. 2 Standard deviation of tropospheric delay using different software at different stations |
图 3给出了这两个测站的对流层时间序列。可以看出,由G-NUT解算的对流层延迟收敛较慢,从而导致收敛阶段对流层解算结果存在较大的偏差,但收敛后其对流层解算精度与RTKLIB和gLAB相当。考虑到对流层参数与测站高程坐标之间的强相关性,图 4给出了这两个测站高程方向收敛的误差序列。由图 4可见,由G-NUT解算高程坐标也需要较长的收敛时间,且和对流层的收敛时间具有较好的一致性。

|
图 3 PETS(测站编号56)和测站TWTF (测站编号66)对流层标准偏差的时间序列 Fig. 3 ZTD series at station PETS (number 56)and TWTF(number 66) |

|
图 4 PETS和测站TWTF U方向的偏差 Fig. 4 Positioning series of PETS and TWTF stations |
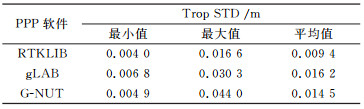
对3种开源软件的对流层延迟估值的标准差进行统计,得到相应的中误差,如表 2所示。可以看出,RTKLIB的对流层估值与IGS符合最好,平均标准差STD为0.9 cm,最大值也仅在1.6 cm左右;G-NUT和gLAB的对流层延迟估计精度相当,平均标准差均在1.5 cm左右。
|
|
表 2 用3种开源软件解算所有测站对流层延迟的STD的统计汇总 Tab. 2 Statistical summary of standard deviation of troposphere |
由于G-NUT未进行天线高改正(下节将有进一步分析),高程方向的坐标与IGS真值相比存在一个系统性偏差。为了对比分析3种软件解算的收敛时间,本文仅设定水平方向的收敛阈值为:N方向和E方向坐标误差小于1.0 dm,且在接下来的20个连续观测历元的误差均小于1.5 dm。图 5给出不同软件解算每个测站的坐标收敛时间。

|
图 5 所有测站收敛时间的统计 Fig. 5 Convergence time of all stations |
由图 5可见,G-NUT解算的收敛时间要明显长于RTKLIB和gLAB,这可能是由于G-NUT中的误差改正模型相对不够完善导致的;gLAB和RTKLIB解算的收敛时间相当,大部分测站都可以在1 h(120个历元)内收敛到指定精度。
2.3 坐标精度分析为了评价不同软件的坐标解算精度,以IGS的周解坐标为参考,从3种软件解算得到的坐标中获得相应收敛之后的坐标估值时间序列与其求差,并将差值转换至N、E、U方向进行比较。本文分别统计收敛后每个测站坐标误差序列的RMS,以及所有测站的每个方向误差序列的RMS值。对3种软件收敛后坐标偏差序列的样本容量进行统计,其中RTKLAB收敛后的样本容量最大为213 401,其次是gLAB的205 247,最后是G-NUT的197 501。此外,将水平方向精度大于15.0 cm的坐标视为粗差剔除,不纳入本文的统计分析中。计算3款开源软件的粗差剔除率可得,G-NUT具有最小的粗差剔除率,为0.07%;其次是gLAB,为0.11%;RTKLIB的粗差剔除率为0.18%,明显高于前两者。图 6给出各测站动态PPP解算所得到定位误差的RMS精度统计。

|
图 6 RTKLAB、G-NUT、gLAB 3种软件的坐标精度统计 Fig. 6 Root mean square deviation of N、E、U components of the all stations |
从图 6可以看到,采用不同软件获得的解算结果中,大部分测站N方向和E方向的RMS分别优于3.5 cm和4.0 cm,U方向解算精度优于1 dm。
但其中TSKB测站(编号65)在水平N方向以及RABT测站(编号59)在水平E方向由RTKLIB解算得到的坐标RMS统计精度相比其他两款软件差,同时KOUC测站(编号34)在水平E方向由gLAB解算的坐标也存在明显波动,并且对于大部分测站采用G-NUT解算的坐标序列高程方向统计精度明显较差,因此对这些异常进行进一步的分析。图 7给出了这4个测站的坐标时间序列。可以看出,TSKB测站在历元时刻16:21:14左右重收敛。经分析,主要是由于RTKLIB的LLI周跳探测算法错误地判断该历元所有卫星发生周跳,从而导致模糊度重新初始化,引起重收敛;由RABT图看出,RTKLAB的偏差序列出现一处很大的异常,该异常发生的时间约为20:04:30,这是由于本文分析采用RTKLIB默认的周跳探测阈值,但由于该站的观测值质量较差,进而导致周跳探测失败,当把周跳探测的阈值提高时,该测站的相应时间段的异常将消除;由KOUC图可以看出,使用gLAB软件处理该测站时,在E方向的22:42:00左右出现很大的波动。分析表明,该时刻G13号观测数据中断导致程序处理异常。为了分析G-NUT解算高程方向精度较差的原因,选取CHAN测站(编号13)为代表,对G-NUT解算的坐标序列高程方向进行分析。可以看出,G-NUT处理得到的U方向估计值具有系统性的误差。经分析,主要是G-NUT解算得到的是天线相位中心的位置, 并非参考点的坐标, 而其余两款软件解算的结果则是基于地面参考点的坐标。当G-NUT软件的处理过程中增加了天线高改正后,则该问题被解决,且对应的高程方向精度得到了提高。其他测站也反映出同样的情况,限于篇幅未在此给出。

|
图 7 TSKB、RABT、KOUC、CHAN的坐标偏差时间序列 Fig. 7 Positioning series of station TSKB, RABT, KOUC and CHAN |
表 3给出了所有测站解算精度的综合统计结果。可以看出,水平方向RTKLIB和G-NUT的解算精度相当,其N方向解算精度约为1.8 cm,E方向的解算精度约为2.6 cm;而gLAB的解算结果相比较差,其在N方向的精度为2.3 cm,E方向精度为3.7 cm。在高程方向,RTKLIB的解算精度最优,RMS约为4.7 cm;gLAB次之,其RMS为6.7 cm;而G-NUT由于未进行天线高改正,其解算精度最差,RMS为8.0 cm。总体而言, 采用上述3款开源PPP处理软件均能够实现cm级的动态定位精度,能够满足导航定位用户的需求。
|
|
表 3 PPP定位结果与参考值之间差值的RMS统计 Tab. 3 Statistical summary of root mean square deviation of N、E、U components |

选取76个IGS跟踪站的数据对RTKLIB、gLAB以及G-NUT 3款开源PPP处理软件的坐标及对流层估计精度进行比较分析。结果表明,由于不同软件采取的质量控制及数据处理策略不同,使得其收敛时间和解算精度有所差异,其中RTKLIB误差改正模型较为完善,解算精度最好,但其数据预处理策略相比G-NUT稍差;G-NUT未进行天线高改正且收敛时间相对较长,但收敛后总体解算精度与RTKLIB相当;gLAB解算精度稍差。总体而言,各个软件静态模拟动态解算得到的对流层STD均优于1.6 cm,水平方向坐标精度优于3 cm,可以满足科研及工程需要。
| [1] |
夏鹏飞, 叶世榕, 江鹏. GPS/GLONASS组合精密单点定位技术在三维水汽层析中的应用[J]. 大地测量与地球动力学, 2015, 35(1): 72-75 (Xia Pengfei, Ye Shirong, Jiang Peng. Research on Three-Dimensional Water Vapor Tomography Using GPS/GLONASS PPP Method[J]. Journal of Geodesy and Geodynamics, 2015, 35(1): 72-75)
(  0) 0) |
| [2] |
赵齐乐, 郭向欣, 李敏, 等. 应用PANDA软件计算中国大陆水平运动速度场[J]. 大地测量与地球动力学, 2016, 36(4): 338-342 (Zhao Qile, Guo Xiangxin, Li Min, et al. Calculation of Horizontal Movement Velocity Field of Chinese Continent Using PANDA Software[J]. Journal of Geodesy and Geodynamics, 2016, 36(4): 338-342)
( 0) |
| [3] |
李凯锋, 欧阳永忠, 陆秀平, 等. 基于PPP技术的海岛礁平面控制测量应用实践[J]. 武汉大学学报:信息科学版, 2015, 40(3): 412-416 (Li Kaifeng, Ouyang Yongzhong, Lu Xiuping, et al. Application of Precise Point Positioning for Island Control Survey[J]. Geomatics and Information Science of Wuhan University, 2015, 40(3): 412-416)
( 0) |
| [4] |
Natural Resources Canada.On-Line Precise Point Positioning How to Use Document[R].Canada Centre for Remote Sensing Geodetic Survey, 2004
( 0) |
| [5] |
Leandro R F, Santos M C, Langley R B. GAPS: The GPS Analysis and Positioning Software-A Brief Overview[C].ION GNSS, 2007
( 0) |
| [6] |
Guo Qiuying. Precision Comparison and Analysis of Four Online Free PPP Services in Static Positioning and Tropospheric Delay Estimation[J]. GPS Solutions, 2015, 19(4): 537-544 DOI:10.1007/s10291-014-0413-5
( 0) |
| [7] |
张建龙, 徐爱功, 张兆南, 等. RTKLIB软件静态精密单点定位精度测试与分析[J]. 全球定位系统, 2014, 39(2): 37-41 (Zhang Jianlong, Xu Aigong, Zhang Zhaonan, et al. Static Precise Point Positioning Accuracy Test and Analysis of RTKLIB Software[J]. GNSS World of China, 2014, 39(1): 37-41)
( 0) |
| [8] |
田英国, 郝金明, 谢建涛, 等. 开源精密单点定位软件gLAB定位精度分析[J]. 全球定位系统, 2014, 39(1): 34-36 (Tian Yingguo, Hao Jinming, Xie Jiantao, et al. The Positioning Accuracy Analysis of Open Source Precise Point Positioning Software gLAB[J]. GNSS World of China, 2014, 39(1): 34-36)
( 0) |
| [9] |
GITHUB.RTKLIB: An Open Source Program Package for GNSS Positioning[EB/OL].http://www.rtklib.com
( 0) |
| [10] |
陈佳清. 利用TEQC及RTKLIB软件分析GPS数据质量[J]. 导航定位学报, 2016, 4(3): 126-130 (Chen Jiaqing. GPS Monitoring Data Quality Analysis Using TEQC and RTKLIB[J]. Journal of Navigation and Positioning, 2016, 4(3): 126-130)
( 0) |
| [11] |
Sanz J, Rovira-Garcia A, Hernández-Pajares M.The ESA/UPC GNSS-Lab Tool(gLAB): An Advanced Educational and Professional Package for GNSS Data Processing and Analysis[C].Toulouse Space Show, 2012
( 0) |
| [12] |
Hernandez-Pajares M, Juan J M, Sanz J.The ESA/UPC GNSS-Lab Tool(gLAB): An Advanced Multipurpose Package for GNSS Data Processing[C].2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing(NAVITEC), 2010
( 0) |
| [13] |
Vaclavovic P, Dousa J, Gyori G. G-Nut Software Library-State of Development and First Results[J]. Acta Geodyn Geomater, 2013, 10(4): 431-436
( 0) |
2. Wuhan Geomatics Institute, 209 Wansongyuan Road, Wuhan 430022, China