 2017, Vol. 37
2017, Vol. 37

2. 贵阳护理职业学院信息中心,贵阳市石林西路2号,550081
随机误差是测量过程中必然存在的误差。对于惯性器件,目前主要使用Allan方差法分析其输出中的随机误差[1-3]。传统的非重叠Allan方差[4]在长相关时间下估计误差较大,震荡也比较大。完全重叠Allan方差[5]的置信度优于非重叠Allan方差,但是数据量较大时,计算时间较长[6]。本文在分析传统总方差法的基础上,构造出半重叠总方差法。
1 传统Allan方差与完全重叠Allan方差法Allan方差的计算过程为:
1) 以固定的采样周期τ0采集数据,得到长度为N的原始数据,记原始数据序列为{ωk};
2) 将样本数据每m个分一组,得M组数据;
3) 对每组数据取平均值,得到新的输出序列

|
(1) |
4) Allan方差的计算式为:

|
(2) |
步骤2)实际为重新采样过程,如图 1。

|
图 1 非重叠采样 Fig. 1 Non-overlapping sampling |
可以看出,采样过程中没有重叠部分,每组数据之间相互独立,所以此采样过程称为非重叠采样。重新采样后组数
完全重叠Allan方差法是在传统Allan方差法基础上发展而来,其改进就体现在采样过程上,如图 2。可以看出,重新采样时每次滑动的步幅d=1,最大程度地利用了原始数据,组数M=N-m+1。这种采样方式称为完全重叠采样。

|
图 2 完全重叠采样 Fig. 2 Fully-overlapping sampling |
容易看出,完全重叠采样得到的组数约为非重叠采样的m倍,数据量较大,计算速度慢。非重叠采样方式得到的数据量较小,而分析精度较低。本文使用折中的采样方式,如图 3。每次滑动步幅d介于1与m之间,得到的组数M介于另外两种采样方式之间,故称其为半重叠采样。

|
图 3 半重叠采样 Fig. 3 Half-overlapping sampling |
传统的总方差法[7]使用镜像映射,在数据的两端进行延拓,从而增加原始数据量。记原始输出序列为ω={ω1, ω2, …, ωN},延拓后数据序列为ω*,则映射规则为[8]:

|
(3) |
映射后数据序列长度为3N-2,约为原始数据的3倍。对新序列使用完全重叠采样方式,得每组数据的平均值:

|
(4) |
式中,M*=3N-m-1,M*表示延拓数据所分组数。总方差的计算式[7]为:

|
(5) |
式(5)也可以写为:

|
(6) |
式中,m最大值为N。传统总方差法使用的是全重叠采样方式,因此称为全重叠总方差。总方差的估计误差为:

|
(7) |
式中,edf(τ)为等效自由度,其计算公式为:

|
(8) |
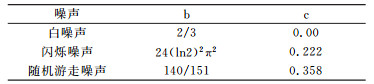
式中,b、c为幂律谱噪声系数,其值取决于幂律谱噪声类型。表 1列出了3种噪声的b、c值。
|
|
表 1 不同类型幂律谱噪声的b、c值 Tab. 1 bandc of different power-law spectrum noise |
本文使用半重叠采样方式得到改进的总方差法,即半重叠总方差。对于半重叠采样方式,每组数据的平均值为:

|
(9) |
式中,


|
(10) |
在对算法进行验证之前,首先分析不同算法采样后得到的组数M和计算时间。两种Allan方差法和两种总方差法的比较如表 2。不同方法对原始数据所分组数M不同,导致的计算时间差距很大。当所分组数M较大时,算法所用时间也较长,如完全重叠Allan方差法和总方差法;当所分组数较小时,算法的分析时间也很短,如Allan方差法;对于半重叠总方差法,其得到的组数居中,分析时间也居中。
|
|
表 2 不同方法的比较 Tab. 2 Comparison of different methods |

实验设备包括数据采集计算机、电源、温控转台、惯性组件、磁防护罩等,如图 4所示。

|
图 4 实验设备图 Fig. 4 Diagram of experimental equipment |
将温控转台放置在隔离振动的地基上,惯性组件固定在温控转台上,将温控箱温度设置为20 ℃,并保温24 h以上,开始收集陀螺的输出。采样频率为100 Hz,采集时间为15 h。陀螺的原始输出为电压值,除以标度因数得到输入角速度(rad/h)。在设备相应位置放置温度传感器以监测惯性器件的温度是否恒定。在实验过程中,温度的平均值和标准差分别为20 ℃和0.09 ℃,说明在实验过程中温度几乎不变,因此可以将陀螺的工作环境视为温度恒定。
以Y轴光纤陀螺的输出数据为例,去除输出中的趋势项和常数项,得到随机信号分布图,如图 5。图中3条直线外的点是根据3σ原则去除的粗差点,将去除粗差后的数据进行随机误差分析。

|
图 5 Y轴陀螺原始数据 Fig. 5 Original data of Y-axis gyro |
为了比较表 2中不同方法对随机信号的分析精度和计算时间,选取Y轴上光纤陀螺的300 s输出数据共30 000个数据点进行分析。
为了对不同采样间隔τ的分析精度进行比较,将采样间隔分为0~10 s、10~40 s、40~100 s三段,分别代表短相关时间、中等相关时间、长相关时间。每种算法的计算时间、不同采样间隔τ对应的标准差如表 3所示,其中括号中的值为各方法相对于Allan方差法的精度提高百分比。
|
|
表 3 各方法分析结果比较 Tab. 3 Comparison of analytical results for various algorithms |

分析表 2和表 3可以看出,表 2中各算法的分组数M与表 3中相应的计算时间成正相关。分析表 3中数据可以看出,在短相关时间条件下,Allan方差、完全重叠Allan方差、半重叠总方差和全重叠总方差的计算精度一致;在中等相关时间和长相关时间条件下,半重叠总方差法相对于Allan方差法有了很大提高,相对于全重叠总方差法分析精度一致,但是半重叠总方差法的分析时间比总方差法减小很多。综上所述,半重叠总方差法分析精度较高,而且算法的计算时间也比较短,克服了总方差法计算时间长、计算困难的问题。
4 结语为解决总方差法计算时间长的问题,本文在分析Allan方差法和完全重叠Allan方差法的基础上,提出非重叠采样方式、完全重叠采样方式和半重叠采样方式,并在此基础上构造了半重叠总方差法。实验表明,半重叠总方差法保持了总方差法的分析精度,且计算时间较短,在原始数据量为30 000的情况下,分析时间仅为总方差法的1/200。
| [1] |
赵思浩, 陆明泉, 冯振明. MEMS惯性器件误差系数的Allan方差分析方法[J]. 中国科学:物理学力学天文学, 2010, 40: 672-675 (Zhao Sihao, Lu Mingquan, Feng Zhenming. Allan Variance Analysis on Error Coefficients of MEMS Inertial Components[J]. Scientia Sinica: Phys, Mech & Astron, 2010, 40: 672-675)
(  0) 0) |
| [2] |
祁家毅, 任顺清, 冯士伟, 等. 半球谐振陀螺仪随机误差分析[J]. 中国惯性技术学报, 2009, 17(1): 98-101 (Qi Jiayi, Ren Shunqing, Feng Shiwei, et al. Random Error Analysis of Hemispherical Resonator Gyro[J]. Journal of Chinese Inertial Technology, 2009, 17(1): 98-101)
( 0) |
| [3] |
李颖.慢光光纤陀螺关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2009 (Li Ying. Key Techniques for the Slow Light Fiber Optic Gyroscope[D].Harbin: Harbin Institute of Technology, 2009)
( 0) |
| [4] |
张树侠, 柳贵福. Allan方差法在光纤陀螺随机噪声分析中的应用[C]. 2001年飞行器惯性器件学术交流会, 镇江, 2001 (Zhang Shuxia, Liu Guifu. Application of Allan Variance Methods in Analyzing Fiber Optic Gyro Random Noise[C]. 2001 Academic Conference on Aircraft Inertial Components, Zhenjiang, 2001)
( 0) |
| [5] |
薛学铭. Allan方差分析测量数据噪声特性的性能研究[J]. 大地测量与地球动力学, 2014, 34(6): 131-134 (Xue Xueming. Study on Properties of Noise Analysis with Allan Variance[J]. Journal of Geodesy and Geodynamics, 2014, 34(6): 131-134)
( 0) |
| [6] |
Riley W J. Handbook of Frequency Stability Analysis[C]. NIST SP, 2007
( 0) |
| [7] |
韩军良, 葛升民, 沈毅. 基于总方差法的光纤陀螺随机误差特性研究[J]. 哈尔滨工业大学学报, 2007, 39(5): 708-711 (Han Junliang, Ge Shengmin, Shen Yi. Research on the Random Error Properties of FOG Based on Total Variance[J]. Journal of Harbin Institute of Technology, 2007, 39(5): 708-711 DOI:10.3321/j.issn:0367-6234.2007.05.008)
( 0) |
| [8] |
石国祥, 陈坚, 叶军, 等. 总方差法在光纤陀螺随机误差分析中的应用[J]. 光电工程, 2012, 39(1): 63-67 (Shi Guoxiang, Chen Jian, Ye Jun. Applications of Total Variance Method in Random Error Analysis of the Fiber Optic Gyro Signal[J]. Opto-Electronic Engineering, 2012, 39(1): 63-67)
( 0) |
2. Information Center, Guiyang Nursing Vocational College, West-Shilin Road, Guiyang 550081, China