 2017, Vol. 37
2017, Vol. 37


2. 地理信息工程国家重点实验室,西安市雁塔路中段1号,710054
GPS坐标时间序列具有时间相关性和空间相关性[1-2]。时间相关性一般采用最大似然估计法进行计算,而空间域误差(共模误差,common mode error,CME)则采用数据后处理方法予以削弱,称之为区域时空滤波[3-7]。文献[3]最早提出堆栈滤波法来减弱空间相关性。但堆栈滤波假设CME在区域内均匀分布,对于空间跨度较大的观测网该假设不成立[6]。文献[4]针对堆栈滤波的不足提出利用主成分分析法(PCA)来去除CME。相对堆栈滤波,PCA在理论上更加严密,但仍存在不足。首先,PCA基于二阶统计量(方差和协方差),其潜在假设为CME服从高斯分布,但CME包含有色噪声,并不满足正态分布[1, 8]。因此,PCA没有充分利用CME的高阶统计信息。其次,PCA滤波时,由于是将各正交分量的方差最大化作为准则,可能会导致提取的某一“数学上”的主成分中包含不同的物理模式,进而导致虚假特征。该问题称为“混合”或“聚类”现象[9]。最后,全球各区域GPS观测网的CME特征并不一致,采用前多少个主分量(principal component,PC)目前仍无客观标准,这就给计算CME带来较大的不确定性。
本文将GPS网的CME提取看作一盲信号分离问题,引入独立分量分析(ICA)方法提取CME。相对于PCA,由于ICA引入高阶统计量,能够分离出统计独立的非高斯信号。本文首先介绍PCA和ICA的理论背景,然后利用GPS数据分析结果进行模拟并加入已知的共模误差对ICA提取共模误差的有效性进行验证,最后与PCA结果进行对比。
1 分析方法 1.1 主成分分析(PCA)设观测网某一区域m×n维矩阵为X,X的列向量为各测站坐标时间序列,其中m为观测历元数,n为测站数,m>n。设X去趋势、去均值后的矩阵为


|
(1) |
式中,S为奇异值si构成的对角阵,i=1, 2, …, k,k为奇异值个数;V的列向量称为主轴或主方向,



|
(2) |
假设有m个不同的时间序列x,为n个相互独立的未知信号s的线性叠加,用混合矩阵A表示。假设该混合模型为一个瞬时模型,也即忽略该模型中任何时间延迟的信号混合,在某一历元t(t=1, …, T)的瞬时数学形式为:
|
(3) |
其中,xt为t时刻m×1维观测向量;sjt为t时刻第j个信号源;aij为第j个信号源对第i个观测值的贡献系数,且满足1≤i≤m,1≤j≤n。考虑所有观测时刻T,写成矩阵形式为:

|
(4) |
式中,X=[x1 x2 … xT],S=[s1 s2 … sT]。
为了恢复原始信号,需要求出A的逆,也称解混矩阵W:

|
(5) |
由于CME在空间域具有相关性,本文采用tICA来提取CME。tICA假设各信号源在时间域相互统计独立,但对应的空间模式并不施加统计约束。本文采用FastICA算法来计算tICA[10]。该算法以各估计的信号源之间的互信息最小化为目标函数,使用基于牛顿迭代的固定点优化方案,其计算效率比传统的梯度法快约10~100倍,且稳健性好。
由(4)和(5)式估计出

|
(6) |
其中,R是


为了验证ICA法提取CME的有效性,本文利用CMONOC I(crustal movement observation network of China) 26个基准站信息生成的模拟数据进行分析。模拟GPS时间序列采用Fakenet软件包生成,其中包括长期速度、周年振幅信号[11]。模拟CME时,假设其为白噪声和闪烁噪声的组合,其噪声模型参数值来自文献[8],各测站速度、周年振幅等参数来源于文献[12]。为了专注于对CME的分析,本实验没有考虑粗差、阶跃以及数据缺失等因素,也没有模拟系统误差以及非线性瞬时信号。将模拟的CME分别加入到26个基准站时间序列上,最终得到包含CME的坐标时间序列。模拟的CME和BJFS站的时间序列如图 1所示。

|
图 1 模拟的CME和BJFS站时间序列 Fig. 1 Simulated CME and the time series of site BJFS |
将模拟数据E、N、U分量的残差序列(线性速度+周年项模型)分别去均值后,对其协方差阵进行奇异值分解,其特征值谱和累积方差如图 2所示。可以看出,E、N、U分量前3个PC的方差之和分别占总方差的36.57%、36.51%和37.03%,其中PC1的方差对总方差的贡献分别为19.90%、19.33%和22.30%,表明各分量的“信号”主要集中在PC1上。

|
图 2 模拟时间序列PCA分解得到的特征值和累积方差 Fig. 2 Percentage of cumulative variance derived from PCA method for simulated time series |
为进一步评估E、N、U分量前多少个PC具有统计显著性,本文采用PA(parallel analysis)进行检验。PA本质上是一蒙特卡洛方法,通过随机模拟大量服从正态分布的观测数据,求得各特征值在一定显著性水平α下的边界值。若观测值矩阵第i个特征值大于对应的边界值,就认为该特征值是显著的[13],则取前i个PC及对应的SR进行分析。经PA检验表明,在1%的显著性水平下E、N、U3个分量前3、5、5个PC是统计显著的,如图 3所示。

|
图 3 模拟时间序列PA检验结果(显著性水平为1%,模拟1 000次,最大值和最小值分别对应边界值) Fig. 3 The cutoff percentile is 1% and the number of samples is 1 000, "data", "high_value", and "low_value" indicate the observed eigenvalues, 99%, and 1% percentile random data eigenvalues, respectively |
基于上述检验结果,分别对E、N、U分量进行PCA滤波。本文仅给出U分量结果,如图 4所示(SR是归一化后的结果,即绝对值最大的响应为±100%, 下同)。可以看出,SR1的符号均相同,且其量级几乎一致,而其他SR的符号和量级则表现出一定的随机性,因而高阶的PC主要包含了与测站相关的局部效应的影响。虽然在本实验中,E、N、U分量SR1中大于25%的测站刚达到50%,但具有明显的“共同特征”,因此本文分别取E、N、U分量的PC1计算CME。该结果与此模拟实验的设置值相吻合,同时也间接证实了文献[4]的结论,即当区域GPS网的PC1占主导时,PCA法的结果与堆栈滤波相一致。

|
图 4 模拟观测网PCAU分量结果(红色箭头表示空间响应为正,蓝色箭头表示空间响应为负) Fig. 4 The results for up component using PCA method |
分别取E、N、U分量统计显著的PC作为输入数据,采用FastICA法进行ICA分解,其中U分量恢复的独立信号IC和其SR如图 5所示。与PCA不同的是,ICA本身无法确定各IC的符号以及各IC之间的次序,但本文的目的是利用ICA提取CME,ICA的不确定性并不影响最终的结果。从图 5可以看出,U分量的IC1对应的测站具有几乎一致的SR,而其他IC对应的SR则无明显空间分布特征。据此分析,IC1对应的SR分别代表了CME在U分量的“共同空间”特征。因此,本文采用IC1来计算CME。

|
图 5 模拟观测网ICAU分量结果(红色箭头表示空间响应为正,蓝色箭头表示空间响应为负) Fig. 5 The results for up component using ICA method |
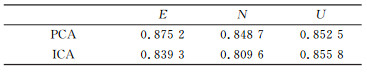
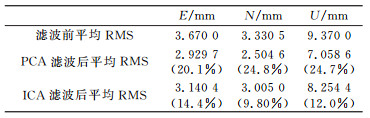
表 1给出了PCA、ICA提取的CME与真值的Pearson相关系数。可以看出,PCA和ICA提取的CME与真值差异不大。该结果表明,当CME在残差中占主导时,ICA能够有效地提取CME,得到和PCA几乎一致的结果。表 2列出了PCA、ICA时空滤波前后残差时间序列RMS的变化情况,括号中的数值为RMS变化百分比。可以看出,PCA滤波后的残差RMS均值在E、N、U分量均比ICA滤波后的RMS要小,其中U分量差异较大。由前文所述,由于PCA是取残差序列方差最大的PC计算CME,因而滤波后的残差序列二阶统计量(RMS)要小于ICA法。
|
|
表 1 PCA、ICA提取的CME与真值的平均相关系数 Tab. 1 Mean Pearson's correlation coefficients of each component for PCA and ICA approaches |
|
|
表 2 PCA和ICA滤波前后平均RMS Tab. 2 Scatter reduction for simulated time series using PCA and ICA approaches |
CME是区域GPS观测网中一项重要误差源,目前广泛应用的PCA仅基于观测数据二阶统计量,丢失了高阶统计信息。本文假设CME与观测网其他误差统计独立,将CME提取看作是一个盲信号分离问题,利用ICA将其与其他误差源进行分离,并用半模拟、半实际数据验证ICA提取CME的有效性和正确性。本文结果为区域GPS观测网时空滤波提供了一个新的思路。
| [1] |
Williams S D P, Bock Y, Fang P, et al. Error Analysis of Continuous GPS Position Time Series[J]. Journal of Geophysical Research: Solid Earth, 2004, 109(B3)
(  0) 0) |
| [2] |
李昭, 姜卫平, 刘鸿飞, 等. 中国区域IGS基准站坐标时间序列噪声模型建立与分析[J]. 测绘学报, 2012, 41(4): 496-503 (Li Zhao, Jiang Weiping, Liu Hongfei, et al. Noise Model Establishment and Analysis of IGS Reference Station Coordinate Time Series Inside China[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(4): 496-503)
( 0) |
| [3] |
Wdowinski S, Bock Y, Zhang J, et al. Southern California Permanent GPS Geodetic Array: Spatial Filtering of Daily Positions for Estimating Coseismic and Postseismic Displacements Induced by the 1992 Landers Earthquake[J]. Journal of Geophysical Research: Solid Earth, 1997, 102(B8): 18057-18070 DOI:10.1029/97JB01378
( 0) |
| [4] |
Dong D, Fang P, Bock Y, et al. Spatiotemporal Filtering Using Principal Component Analysis and Karhunen-Loeve Expansion Approaches for Regional GPS Network Analysis[J]. Journal of Geophysical Research: Solid Earth, 2006, 111(B3)
( 0) |
| [5] |
Nikolaidis R. Observation of Geodetic and Seismic Deformation with the Global Positioning System[D]. San Diego: University of California, 2002
( 0) |
| [6] |
Márquez-Azúa B, DeMets C. Crustal Velocity Field of Mexico from Continuous GPS Measurements, 1993 to June 2001: Implications for the Neotectonics of Mexico[J]. Journal of Geophysical Research: Solid Earth, 2003, 108(B9)
( 0) |
| [7] |
田云锋, 沈正康. GPS观测网络中共模分量的相关加权叠加滤波[J]. 地震学报, 2011, 33(2): 198-208 (Tian Yunfeng, Shen Zhengkang. Correlation Weighted Stacking Filtering of Common Mode Component in GPS Observation Network[J]. Acta Seismologica Sinica, 2011, 33(2): 198-208 DOI:10.3969/j.issn.0253-3782.2011.02.007)
( 0) |
| [8] |
Wang W, Zhao B, Wang Q, et al. Noise Analysis of Continuous GPS Coordinate Time Series for CMONOC[J]. Advances in Space Research, 2012, 49(5): 943-956 DOI:10.1016/j.asr.2011.11.032
( 0) |
| [9] |
Forootan E, Kusche J. Separation of Global Time-Variable Gravity Signals into Maximally Independent Components[J]. Journal of Geodesy, 2012, 86(7): 477-497 DOI:10.1007/s00190-011-0532-5
( 0) |
| [10] |
Hyvärinen A. Fast and Robust Fixed-point Algorithms for Independent Component Analysis[J]. IEEE Trans on Neural Networks, 1999, 10(3): 626-634 DOI:10.1109/72.761722
( 0) |
| [11] |
Agnew D C. Realistic Simulations of Geodetic Network Data: The Fakenet Package[J]. Seismological Research Letters, 2013, 84(3): 426-432 DOI:10.1785/0220120185
( 0) |
| [12] |
田云锋. GPS位置时间序列中的中长期误差研究[D].北京: 中国地震局地质研究所, 2011 (Tian Yunfeng. Study on Inermedian- and Long-term Errors in GPS Position Time Series[D]. Beijing: Institute of Geology, CEA, 2011)
( 0) |
| [13] |
Peres-Neto P R, Jackson D A, Somers K M. How Many Principal Components? Stopping Rules for Determining the Number of Non-trivial Axes Revisited[J]. Computational Statistics & Data Analysis, 2005, 49(4): 974-997
( 0) |
2. State Key Laboratory of Geo-Information Engineering, 1 Mid-Yanta Road, Xi'an 710054, China