 2017, Vol. 37
2017, Vol. 37


2. 湖南联智桥隧技术有限公司,长沙市开元路17号,410199;
3. 湘潭大学土木工程与力学学院,湘潭市羊牯塘,411100;
4. 63798部队,西昌市,615621;
5. 湖南珞珈德毅信息技术有限公司,长沙市尖山路39号,410205
全球卫星导航系统(GNSS)都有3个及3个以上频点的导航信号。目前三频模糊度的解算方法以TCAR和CAR为代表[1-2]。在短基线情形下,两种算法都可以以较高的成功率固定模糊度。而对于中长基线,由于残留系统误差的影响,导致其模糊度难以快速固定。李博峰等[3]提出利用模糊度固定后的两个超宽巷与一个窄巷组合构成无几何无电离层组合观测值,然后通过多个历元仿真数据平滑固定窄巷模糊度,从而实现中长基线的模糊度快速固定。Wang等[4]利用GPS三频实测数据对三频无几何无电离层模糊度解算进行性能分析。
本文分析了双差电离层残差对传统三频模糊度解算中宽巷及窄巷模糊固定成功率的影响,提出一种新的无几何无电离层三频模糊度解算方法。该方法通过对伪距观测值赋予不同的权重,辅助宽巷及窄巷模糊度消除双差电离层残差的影响,使其只受观测噪声的影响。通过多个历元平滑取整,即可获取宽巷及窄巷模糊度值,实现中长基线模糊度的快速固定。通过实测GPS/BDS中长基线三频数据分析表明,该方法可以有效地实现中长基线模糊度的快速解算。
1 传统无几何三频模糊度解算方法几何无关(geometry-free)模型是指采用多频伪距和相位组合观测值消除几何误差的模糊度求解模型。考虑电离层延迟的影响[5],几何无关模型可以表示为:
|
(1) |
式中,ΔN(i, j, k)为组合观测值的双差整周模糊度,ΔP(l, m, n)、Δφ(i, j, k)分别为双差伪距和载波相位组合观测值,ΔI为双差电离层残差,λ(i, j, k)为组合观测值波长,β为频点f1上的一阶电离层延迟系数,i、j、k为载波相位观测值的组合系数,l、m、n为伪距观测值的组合系数,εΔP(l, m, n)、εΔφ(i, j, k)分别为双差伪距和载波相位组合值的观测噪声。
显然,采用几何无关模型求解模糊度的主要限制是电离层延迟和伪距噪声。假定不同频率的双差载波相位观测值精度相等:

|
(2a) |
同时,不同频率的双差伪距观测值精度也相等:

|
(2b) |
根据误差传播率,双差模糊度的精度为:
|
(3) |
假定3个频率满足f1>f2>f3,且f1-f2>f2-f3,根据最优三频线性组合观测值理论筛选的超宽巷(EWL)、宽巷(WL)和窄巷(NL)载波相位观测值分别为φ(0, 1, -1)、φ(1, -1, 0)和φ(1, 0, 0)[6]。传统的三频模糊度解算具体步骤如下。
首先,固定超宽巷模糊度(EWL):

|
(4) |

|
(5) |

|
(6) |
其次,固定宽巷模糊度(WL):

|
(7) |

|
(8) |

|
(9) |
最后,固定窄巷模糊度(NL):
|
(10) |

|
(11) |

|
(12) |

|
(13) |
由方程(4)、(7)、(10)可知,超宽巷、宽巷和窄巷模糊度浮点解的精度分别为:

|
(14) |
|
(15) |

|
(16) |
超宽巷模糊度(EWL)的固定是无几何无电离层组合,即消除了与几何相关的误差(对流层延迟、星历误差等)及电离层延迟,只受多路径及观测噪声的影响;而宽巷模糊度(WL)及窄巷模糊度(NL)的固定只是一个无几何组合,没有消除电离层延迟的影响。假定观测噪声服从零均值正态分布,则:

|
(17) |
|
(18) |

|
(19) |
在给定观测噪声及电离层延迟大小的条件下,可以根据下式计算每一步的模糊度固定成功率[7]:
|
(20) |
式中,x表示模糊度浮点解与相应真值的差值,μ和σ2分别表示x的均值和方差。
假定σΔφ=4 mm,σΔP=60 cm。无论短基线或长基线,对于超宽巷而言,由于其波长较长,观测噪声对其影响较小,则其模糊度固定成功率非常高。但对于宽巷及窄巷而言,由于短基线之间的电离层延迟相关性强,双差之后可以忽略其对宽巷及窄巷的影响,其模糊度固定成功率非常高;而对于长基线,由于电离层延迟相关性减弱,双差之后难以消除,导致其模糊度固定成功率降低。由图 1可以看出,双差电离层残差对窄巷单历元模糊度固定成功率较宽巷更为严重。BDS的宽巷单历元模糊度固定成功率优于GPS,而窄巷两者相当。对于宽巷而言,当双差电离层残差ΔI<1 m时,GPS/BDS的宽巷模糊度固定成功率大于50%/94%。双差电离层延残差ΔI>2 m时,GPS/BDS的宽巷模糊度固定成功率基本为0。对于窄巷而言,当双差电离层残差ΔI<0.035 m时,GPS/BDS的宽巷模糊度固定成功率均大于80%。当ΔI>0.07 m时,GPS/ BDS的窄巷模糊度固定成功率基本均为0。对于中长基线而言,双差电离层残差很容易超过0.07 m,导致窄巷模糊度固定失败。

|
图 1 双差电离层残差对单历元宽巷/窄巷模糊度固定成功率的影响 Fig. 1 WL and NL single epoch AR success rate versus the residual ionospheric delay of double difference |
由§1知,双差电离层残差是影响中长基线无几何三频模糊度解算中宽巷及窄巷模糊度解算的关键因素。为提高模糊度固定的成功率,必须消除或减弱双差电离层残差的影响。本文提出通过对伪距观测值赋予不同的权重,辅助宽巷及窄巷模糊度消除双差电离层残差的影响。
2.1 宽巷模糊度固定为了消除双差电离层残差对宽巷模糊度固定的影响,对伪距观测值和已固定模糊度的超宽巷载波相位观测值赋予不同的权重,组成新的消电离层伪距观测值。宽巷模糊度固定所利用的消电离层伪距观测值为:

|
(21) |
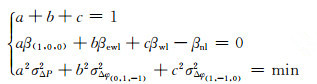
系数a、b、c必须满足以下条件:
|
(22) |
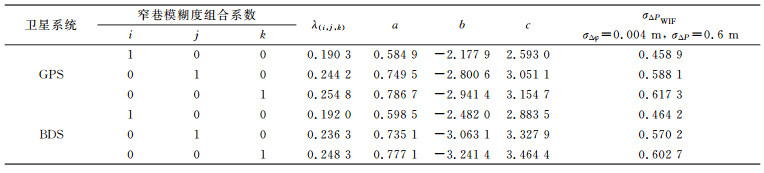
假定σΔφ=4 mm,σΔP=60 cm,通过式(22)进行搜索,得到宽巷观测值对应的消电离层组合ΔPWIF的系数(表 1)。
|
|
表 1 GPS与BDS宽巷对应消电离层组合伪距值的系数a、b、c及观测噪声 Tab. 1 The combination coefficients of ionospheric-free with pseudoranges and observation noise for WL of GPS and BDS |

消电离层伪距观测值的观测噪声σΔPWIF为:

|
(23) |
宽巷(WL)模糊度固定公式为:

|
(24) |

|
(25) |
由式(24)知,宽巷模糊度的固定组合也是一个无几何无电离层组合,消除了双差电离层残差的影响,仅受观测噪声的影响。根据误差传播率,其宽巷模糊度浮点解服从零均值正态分布:

|
(26) |

|
(27) |
可根据式(27)计算宽巷模糊度估值的标准差,见表 2。
|
|
表 2 宽巷模糊度估值标准差 Tab. 2 The STD of WL ambiguity |
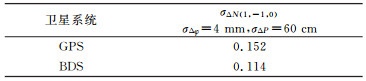
由图 2知,GPS/BDS单历元宽巷模糊度固定成功率都可以达到99.9%,标准差分别为0.152和0.114(表 2),即可以实现单历元模糊度固定。对比图 2与图 1(a),新方法的宽巷模糊度固定不受双差电离层残差的影响。

|
图 2 双差电离层残差对单历元宽巷WL(1,-1,0)模糊度固定成功率的影响 Fig. 2 WL(1, -1, 0) single epoch AR success rate versus the residual ionospheric delay of double difference |
为了消除双差电离层残差对窄巷模糊度固定的影响,通过对伪距观测值和已固定模糊度的超宽巷及宽巷载波相位观测值赋予不同的权重,组成新的消电离层伪距观测值。
窄巷模糊度固定所利用的消电离层伪距组合为:

|
(28) |
系数a、b、c满足以下条件:
|
(29) |
利用式(29)进行搜索,可以得到窄巷观测值对应的消电离层组合ΔPNIF的系数(表 3)。
|
|
表 3 GPS与BDS窄巷对应消电离层组合伪距值的系数a、b、c及观测噪声 Tab. 3 The combination coefficients of ionospheric-free with pseudoranges and observation noise for NL of GPS and BDS |
消电离层伪距观测值的观测噪声σΔPNIF为:

|
(30) |
通过表 3可知,选取窄巷N(1, 0, 0)进行模糊度固定,则:

|
(31) |

|
(32) |
由此可见,窄巷(NL)模糊度固定消除了双差电离层残差的影响,仅受观测噪声的影响。即窄巷模糊度固定也是一个无几何无电离层组合,其窄巷模糊度浮点解服从零均值正态分布:

|
(33) |

|
(34) |
根据式(34)可计算窄巷模糊度估值的标准差,见表 4。
|
|
表 4 窄巷模糊度估值标准差 Tab. 4 The STD of NL ambiguity |
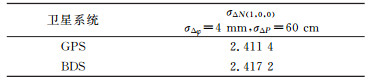
由表 4可知,GPS/BDS窄巷模糊度估值的标准差为2.411 4、2.417 2,导致窄巷模糊度不能实现单历元固定。但该窄巷模糊度解算模型有效地消除了双差电离层残差的影响,几乎不受基线长度的约束,且只受观测噪声的影响。因此,可以通过多个历元平滑取整获取窄巷模糊度固定解:
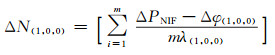
|
(35) |
本文使用司南测量型接收机于2015-12-28在郑州地区采集一组GPS/GLONASS/BDS三星八频静态基线数据,基线长度42.3 km,采样间隔10 s, 数据长度约3 h。为了分析本文提出的三频模糊度解算方法的性能,统计超宽巷及宽巷单历元模糊度固定成功率、宽巷及窄巷模糊度的标准差(STD)和窄巷模糊度的收敛速度(模糊度收敛值的绝对值小于0.5周时所需历元数),与文献[3]提出的中长基线三频模糊度解算方法进行对比(LGIF-TCAR)。实验中,设置截止高度角为20°。使用几何模型采用LAMBDA方法多历元连续搜索[8],确定卫星对的模糊度值作为参考值。采集数据中观测到GPS三频数据的仅有G10、G24。
LGIF-TCAR方法中超宽巷EWL模糊度固定与新方法一样,宽巷WL模糊度固定方法虽然不一样,但固定成功率都非常高,故不对新方法与LGIF-TCAR方法的宽巷超宽巷模糊度解算性能进行对比。论文着重对两种方法的窄巷模糊度收敛速度和模糊度估值的精度(STD)进行对比。
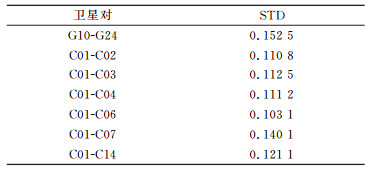
从表 5可以看出,超宽巷EWL的单历元模糊度固定成功率为100%;宽巷的单历元模糊度固定成功率最小值为96.47%,最大值为100%。为了使宽巷模糊度固定解可靠,结合图 3,可以通过2~3个历元平滑而正确固定模糊度值。通过表 6可知,所有卫星对的宽巷模糊度估值的STD全部小于0.15周。由此可知,新方法的超宽巷EWL模糊度固定可以实现单历元模糊度固定,而宽巷WL可以通过2~3个历元平滑而正确固定模糊度值。限于篇幅,只绘制卫星对G10-G24、C01-C02、C01-C06、C01-C14的宽巷模糊度估值的STD及其收敛的时间序列,如图 3。
|
|
表 5 卫星对单历元超宽巷及宽巷模糊度固定成功率 Tab. 5 Single epoch success rate of AR of EWL and WL ambiguity |


|
图 3 宽巷模糊度估值误差及其收敛的时间序列 Fig. 3 Float WL ambiguity error and its averaged ambiguity over different number of epochs |
|
|
表 6 宽巷模糊度估值的STD Tab. 6 The STD of WL ambiguity |
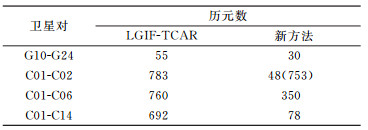
限于篇幅,仅讨论G10-G24、C01-C02(GEO)、C01-C06(IGSO)、C01-C14(MEO)卫星对。通过表 7可知,两种方法的4组卫星对最终全部收敛为正确的模糊度值。其中,GPS卫星对窄巷模糊度收敛速度最快,优于BDS卫星对。对于GPS卫星对,新方法仅需30个历元,而LGIF-TCAR方法需要55个历元。对于BDS卫星对,新方法需要的历元数分别为48(753)、350、78,而LGIF-TCAR方法需要的历元数分别为783、760、692,即北斗MEO卫星窄巷模糊度收敛速度优于IGSO,IGSO优于GEO卫星。北斗IGSO卫星与GEO卫星窄巷模糊度收敛都比较缓慢,可能是由于北斗IGSO、GEO卫星的空间几何结构变化缓慢所致。从图 4发现,采用LGIF-TCAR方法的BDS卫星对的窄巷模糊度估值误差存在周期性波动,由于观测时间比较短没有确定其周期大小,而GPS卫星对的窄巷模糊度估值误差不存在周期性波动。从图 5可以发现,采用新方法的BDS卫星对,仅C01-C02卫星对存在周期波动,其窄巷模糊度第一次收敛为正确的模糊度值需48个历元,第二次收敛为正确的模糊度值需753个历元。由此可见,相比于LGIF-TCAR方法,新方法可以提高窄巷模糊度的收敛速度,GPS卫星对窄巷模糊度收敛速度优于BDS,且北斗MEO卫星优于IGSO、GEO。
|
|
表 7 窄巷模糊度收敛所需的历元数 Tab. 7 The numbers of epoch of the convergence of NL ambiguity |

|
图 4 窄巷模糊度估值误差及其收敛的时间序列(LGIF_TCAR) Fig. 4 Errors of float NL ambiguity and its averaged ambiguity over different number of epochs(LGIF-TCAR) |

|
图 5 窄巷模糊度估值误差及其收敛的时间序列(新方法) Fig. 5 Errors of float NL ambiguity and its averaged ambiguity over different number of epochs(new method) |
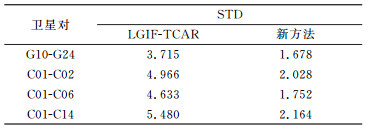
从表 8可以看出,采用LGIF-TCAR方法的4组卫星对的窄巷模糊度估值的STD都大于3.5周,其中GPS卫星对的窄巷模糊度估值STD最小,为3.715周,而BDS卫星对的窄巷模糊度估值的STD都大于4.5周,其分别为4.966、4.633、5.480;而采用新方法的4组卫星对的窄巷模糊度估值的STD都大于1.5周,其中GPS卫星对的窄巷模糊度估值的STD最小,为1.678周,而BDS卫星对的窄巷模糊度估值的STD分别为2.028、1.752、2.164。由此可见,相比于LGIF-TCAR方法,新方法提高了窄巷模糊度估值的精度,且GPS卫星对的窄巷模糊度估值精度优于BDS。
|
|
表 8 窄巷模糊度估值的STD Tab. 8 The STD of NL ambiguity |
通过对传统的无几何三频模糊度解算方法中宽巷及窄巷模糊度受双差电离层的影响进行分析,提出一种新的无几何无电离层三频模糊度解算方法,并应用于中长基线三频模糊度快速解算。通过算例分析得出以下结论:1)新方法可以有效地实现中长基线模糊度的快速解算;2)中长基线GPS三频模糊度解算性能优于BDS,其中北斗MEO卫星的三频模糊度解算性能优于北斗IGSO和GEO卫星。
| [1] |
Forssell B. Carrier Phase Ambiguity Resolution in GNSS-2[C]. ION GPS-97, Kansaa City, 1997
(  0) 0) |
| [2] |
Vollath U, Birnbach S. Analysis of Three-Carrier Ambiguity Resolution (TCAR) Technique for Precise Relative Positioning in GNSS-2[C]. ION GPS-98, Nashville, Tennessee, USA, 1998
( 0) |
| [3] |
李博峰, 沈云中. 中长基线三频GNSS模糊度的快速算法[J]. 测绘学报, 2009, 38(4): 296-301 (Li Bofeng, Shen Yunzhong. A New Method for Medium and Long Range Three Frequency GNSS Rapid Ambiguity Resolution[J]. Atca Geodaetica et Cartographic Sinica, 2009, 38(4): 296-301 DOI:10.3321/j.issn:1001-1595.2009.04.003)
( 0) |
| [4] |
Wang K, Rothacher M. Ambiguity Resolution for Triple-Frequency Geometry-Free and Ionosphere-Free Combination Tested with Real Data[J]. J Geod, 2013, 87: 539-553 DOI:10.1007/s00190-013-0630-7
( 0) |
| [5] |
Feng Y. GNSS Three Carrier Ambiguity Resolution Using Ionosphere-reduced Virtual Signals[J]. J Geod, 2008, 82(12): 847-862 DOI:10.1007/s00190-008-0209-x
( 0) |
| [6] |
李金龙.北斗/GPS多频实时精密定位理论与算法[D].郑州: 信息工程大学, 2014 (Li Jinlong.BDS/GPS Multi-Frequency Real-Time Kinematic Positioning Theory and Algorithms[D]. Zhengzhou: Information Engineering University, 2014)
( 0) |
| [7] |
Teunissen P J G. Success Probability of Integer GPS Ambiguity Rounding and Bootstrapping[J]. J Geod, 1998, 72: 606-612 DOI:10.1007/s001900050199
( 0) |
| [8] |
Teunissen P J G. The Least-Squares Ambiguity Decorrelation Adjustment: A Method for Fast GPS Ambiguity Estimation[J]. J Geod, 1995, 70: 65-82 DOI:10.1007/BF00863419
( 0) |
2. Hunan Lianzhi Bridge and Tunnel Technology Co Ltd, 17 Kaiyuan Road, Changsha 410199, China;
3. College of Civil Engineering and Mechanics, Xiangtan University, Yanggutang, Xiangtan 411100, China;
4. PLA 63798 Troops, Xichang 615621, China;
5. Hunan Luojia Deyi Information Technology Co Ltd, 39 Jianshan Road, Changsha 410205, China