 2017, Vol. 37
2017, Vol. 37



2. 地球空间信息技术协同创新中心,武汉市珞喻路129号,430079
稳定、高精度的轨道是导航定位、钟差估计和大气参数估计中重要的基础数据。由于广播星历精度的限制,高精度GNSS用户一般选用IGS精密轨道和钟差。目前IGS分析中心包括欧洲定轨中心(CODE)、加拿大自然资源部(EMR)、欧洲空间局(ESA)、德国地学研究中心(GFZ)、法国空间研究中心(GRG)、美国喷气动力实验室(JPL)、美国麻省理工学院(MIT)、美国海洋大气局(NGS)和美国斯克里普斯海洋学研究所(SIO),均能独立提供精度优于3 cm的GPS精密轨道。由于各分析中心使用的基准站坐标、数据处理软件和定轨策略等不尽相同,定轨结果存在明显差异[1]。IGS将各分析中心的轨道结果进行处理,获得的综合产品精度优于2.5 cm。
已有许多学者对卫星轨道综合进行研究。Springer等于1993年发现分析中心轨道坐标系统存在偏差,并与其极移参数之差相关;Kouba等在1994年使用L1\|范数法计算转换参数,并基于加权平均进行产品综合。Griffiths在2012年分析了最终轨道产品的不一致性,优化了最终轨道的综合模型。但是,这些研究很少关注使用不同的坐标框架统一方法和分析中心组合对综合产品精度及一致性的影响。故本文使用自行编写的算法对GPS卫星轨道进行综合,并注重分析综合产品的精度及一致性,为北斗系统中不同类型卫星(如GEO/IGSO/MEO)轨道综合方法提供参考[3]。
1 轨道综合原理及数学模型目前IGS仅发布GPS、GLONASS综合轨道产品,产品综合方法有两种,即动力学法和加权平均法[4]。第一种方法是将各分析中心产品作为伪观测数据进行轨道确定,估计卫星初始状态和其他力模型参数,保持了轨道动力学特性,可靠性较高,但增加了算法复杂度,且轨道和钟差综合无法采用同一算法。第二种方法是将分析中心产品首先转换到同一参考框架,然后进行加权平均得到综合产品,是IGS目前采用的方法。该方法简单灵活,轨道和钟差综合可采用类似算法,轨道综合产品在特定条件下满足动力学特性,但丧失了轨道动力学的高阶项特性。本文将使用加权平均法进行轨道综合研究。
1.1 坐标参考框架的统一由于不同分析中心的轨道坐标参考框架之间存在系统性偏差,在轨道综合前需通过旋转变换消除坐标参考框架不一致的影响。在顾及分析中心ERP参数值和SINEX解差异的情况下统一坐标参考框架,对分析中心的轨道坐标系统作旋转变换。
本文使用两种统一坐标参考框架的方法:1)最终轨道综合选取IGS发布的极移解作为“真值”,以当天中间时刻ERP参数为参考,计算分析中心极移解与“真值”的偏差,然后对轨道坐标作旋转变换;2)最终轨道综合选取IGS发布的周总结文件(http://cddis.gsfc.nava.gov/GPS/product)中的分析中心站坐标单天解相对于综合解的SINEX旋转参数RX、RY、RZ作为参考,对分析中心轨道坐标进行旋转变换,并统一至ITRF。考虑到两种方法旋转统一后分析中心卫星坐标系统间仍存在偏差,选取所有分析中心的加权平均轨道作为参考,将分析中心轨道坐标通过Helmert转换统一到相同的坐标参考框架下,并确定分析中心参与轨道综合的权重[1,5-
Springer等发现,不同分析中心轨道坐标X、Y方向的旋转参数RX、RY与其极移参数Y、X方向的差值DY、DX存在强相关性。本文使用相同的方法(方法1),以儒略日(MJD)57 180~57 194数据为例获得相似的结果,如图 1、图 2所示。只需要选择一个分析中心的极移参数作为基准,不同分析中心之间的旋转参数可以用两者间的极移参数之差替代。由于极移差值均为小角度,对分析中心轨道坐标作旋转变换的公式可按式(1)简化为[9]:
|
(1) |

|
图 1 分析中心轨道间旋转参数RX和极移参数Y分量之差的关系 Fig. 1 Difference in Y-coordinate of the pole and X-rotation of the orbit system analysis centers above |

|
图 2 分析中心轨道间旋转参数RY和极移参数X分量之差的关系 Fig. 2 Difference in X-coordinate of the pole and Y-rotation of the orbit system analysis centers above |
式中,XAC、YAC、ZAC分别表示各分析中心卫星坐标(AC代表分析中心编号);X′AC、Y′AC、Z′AC为经过极移旋转之后的分析中心卫星坐标,DXp、DYp是分析中心极移参数与IGS极移参数在X、Y方向的差值。
|
(2) |
其中,
|
(3) |
式中,RXsnxac、RYsnxac、RZsnxac是IGS公布的周总结文件中分析中心站坐标单天解相对于其综合解的旋转参数;TXac、TYac、TZac、DacRXac、RYac、RZac分别为分析中心卫星坐标与加权平均轨道间的平移参数、比例因子和旋转参数;Xiac、Yiac、Ziac是分析中心卫星坐标,X′iac、Y′iac、Z′iac为经过坐标框架统一之后的分析中心卫星坐标。
1.2 轨道综合定权方法及计算流程由于分析中心定轨策略与解算软件不同,导致其精度存在明显差异,但从GPS 1 506周后,分析中心轨道精度趋于稳定,如图 3所示。因此,分析中心合适的权重设定是框架统一之后轨道综合的关键。

1) 采用基于Helmert旋转后的验后方差对各分析中心定权,公式为:
|
(4) |
式中,Nsatcent是分析中心卫星个数(cent代表分析中心编号);Nepochcentsat是分析中心每颗卫星的历元数;p′centsat(X′centsat,Y′centsat,Z′centsat)是分析中心统一坐标参考框架后的精密轨道坐标;

|
(5) |
2) 使用上式计算分析中心权重,加权综合获得轨道pwsat,表示为:
|
(6) |
3) 各分析中心不同卫星的权重计算公式为:

|
(7) |

|
(8) |
式中,Ncentsat提供每颗卫星轨道数据的分析中心个数;p'centsat(X′centsat,Y′centsat,Zcent′sat)是分析中心统一坐标参考框架后的卫星坐标;
4) 分析中心卫星坐标与加权平均卫星坐标进行第二次Helmert旋转时,权重使用pwsat进行估计。
5) 最终的综合轨道计算公式可表示为:
|
(9) |
式中,wcent为各分析中心权重;p″centsat为两次Helmert旋转后的分析中心卫星坐标;pcombsat为最终加权轨道;Ncentsat为提供共视卫星的分析中心个数。
1.3 轨道综合精度评定根据各分析中心两次旋转后的坐标与综合轨道间X、Y、Z 3个方向坐标分量的关系,可得各分析中心与参考轨道间的RMS和WRMS,以及各颗卫星的RMS,公式如下:
|
(10) |
|
(11) |
|
(12) |
其中,
|
(13) |
式中,Nsatcent是分析中心卫星个数;Nepochcentsat是分析中心每颗卫星的历元数;δcentsat是分析中心轨道头文件各卫星精度因子;p″centsat是分析中心经过两次Helmert旋转后的精密轨道坐标; pcombsat是最终综合轨道坐标。
2 实验及结果分析按上述流程,利用自编的轨道综合算法,使用GPS 1 800~1 852周的9家分析中心事后精密轨道为实验数据,进行精密轨道综合实验。
2.1 不同分析中心组合的综合轨道精度分析根据分析中心旋转参数的一致性与先验精度,利用不同的分析中心组合得到综合轨道,并与IGS参考轨道比较得到所有卫星的平均三维RMS。
由图 3可知,分析中心的轨道精度差异明显。在本文所使用的数据中,SIO在分界点(GPS 1 807周)之前,其解算的轨道与ERP产品之间的一致性较差。为保证综合轨道与综合的ERP之间具有较好的一致性,其不参与综合。同时,由SIO转换参数中的旋转参数可以看出,其轨道产品相对其他分析中心的产品存在较为明显的系统性偏差。在GPS轨道综合中,旋转参数超过0.3 mas的分析中心轨道也不参与综合。在分界点之后,SIO的轨道产品满足参与综合的条件,这可能是因为其优化了轨道解算策略。我们选择使用加入分析中心SIO和不加入SIO两种组合情形进行精度分析(两种坐标框架统一方法的趋势相同,故以第二种方法作图),ALLRMS代表单天所有卫星平均值的三维RMS,DELRMS代表去掉质量较差的卫星(卫星的质量由综合轨道各颗卫星精度因子判断)之后的单天所有卫星平均值的三维RMS。统计1 a的结果如图 4所示,在1 807周(MJD=56 893)后加入SIO,综合轨道精度明显提高,所有卫星的三维RMS精度优于3 mm,去除质量较差卫星后的精度总体优于2 mm。这是因为SIO轨道处理模型的精化和轨道质量控制的改进,优化了轨道解算策略,提高了其ERP产品与综合产品的一致性。

|
图 4 综合轨道结果与IGS综合轨道所有卫星平均三维RMS Fig. 4 Mean three dimensional RMS of all satellites between combined obit and IGS combined orbit |
根据§2.1分析,取最优的分析中心组合结果,利用不同的参考框架统一方法获得GPS综合轨道。将IGS综合轨道作为参考轨道,计算每天所有卫星的平均三维RMS,如图 5和表 1所示。经分析得到,使用SINEX旋转参数统一坐标框架的方法优于使用ERP参数旋转的方法,综合轨道的精度明显提高,所有卫星每天的三维RMS总体优于2 mm,所有卫星1 a的平均三维RMS约为1.5 mm,根据各颗卫星的精度因子加权计算的三维WRMS为1.24 mm。

|
图 5 两种统一坐标参考框架方法下综合轨道和IGS参考轨道差异的三维RMS Fig. 5 Three dimensional RMS between combined orbit and IGS with two frame difference elimination methods |
|
|
表 1 两种统一坐标参考框架方法下综合轨道 Tab. 1 RMS and WRMS of combined orbit by two frame difference elimination methods |
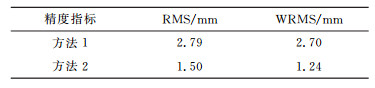
图 6表示利用本文算法得到的GPS综合轨道和IGS综合轨道间的平移参数、旋转参数和比例因子,平移参数精度优于1 mm,比例因子精度优于0.2 ppb,旋转参数精度可达μas量级,其均值小于10 μas,该算法计算得到的综合轨道可以满足精密定位的需要。

|
图 6 综合轨道与IGS参考轨道框架差异参数图 Fig. 6 The frame difference parameters between combined obit and IGS reference orbit |
图 7给出了综合轨道的加权三维WRMS。可以看出,与IGS综合轨道的三维差异小于3 mm,平均值为1.16 mm。由于本文使用最小二乘平差策略,而IGS使用L1-范数平差策略,且实现策略与IGS也存在差异,导致本文结果与IGS计算结果仍存在差异。考虑到IGS标称的GPS轨道一维精度为2.5 cm(三维精度为4.33 cm),本文结果与IGS结果的差异可理解为系统噪声,足以证明算法的正确性。

由表 2可得,本文计算的各分析中心与IGS参考轨道差异的RMS与WRMS均大于10 mm,与IGS公布的各分析中心RMS与WRMS基本一致,而本文加权综合后的轨道与IGS参考轨道的差异均小于3 mm,RMS为1.5 mm,证明了加权综合算法的有效性。
3 结语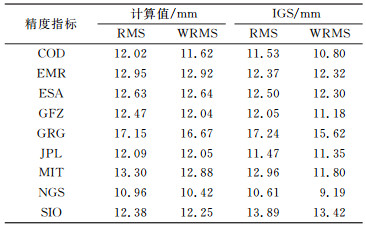
1) 根据不同分析中心的先验轨道精度,以及旋转参数精度与一致性分析发现,加入分析中心SIO和不加入SIO获得的综合轨道精度三维RMS差异可达4 mm。在GPS 1 807周之后,分析中心SIO的Z方向旋转参数较其他分析中心的精度和一致性有所提高;加入SIO进行综合,最终轨道所有卫星的三维RMS值整体优于3 mm,均值优于2 mm。
2) 使用不同统一参考框架进行轨道综合,精度差异明显。对1 a的数据进行统计,方法1三维RMS精度平均2.8 mm,方法2精度平均1.5 mm。故使用单天SINEX旋转参数统一坐标参考框架进行轨道综合,结果优于使用极移参数旋转方法。
3) 选择最优的分析中心组合和框架差异消除方法进行精密轨道综合,获得的最终综合轨道与IGS综合轨道的三维差异小于3 mm,均值为1.50 mm,根据各卫星精度因子的差异加权获得三维RMS平均值为1.16 mm,故可证明本文所使用算法的精度和稳定性,可为北斗系统的GEO/IGSO/MEO卫星轨道组合方法的改进和对比提供理论基础。
| [1] |
Springer T A, Beutler G.Towards An Official IGS Orbit by Combining the Results of All IGS Processing Centers[C].1993
(  0) 0) |
| [2] |
李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2010 (Li Zhenghang, Huang Jinsong. GPS Surveying and Data Processing[M]. Wuhan: Wuhan University Press, 2010)
( 0) |
| [3] |
Steigenberger P, Hugentobler U, Hauschild A, et al. Orbit and Clock Analysis of Compass GEO and IGSO Satellites[J]. Journal of Geodesy., 2013, 87(6): 515-525 DOI:10.1007/s00190-013-0625-4
( 0) |
| [4] |
Beutler G, Kouba J, Springer T. Combining the Orbits of the IGS Analysis Centers[J]. Journal of Geodesy, 1995, 69(4): 200-222
( 0) |
| [5] |
Kouba J, Mireault Y, Lahaye F.IGS Orbit/Clock Combination and Evaluation[R].International GPS Service for Geodynamics Annual Report, 1994
( 0) |
| [6] |
Kouba J, Mireault Y, Analysis Coordinator Report[R].International GPS Service for Geodynamics (IGS) Annual Report, 1996
( 0) |
| [7] |
Willis P, Slater J.International GPS Service[R].IGS Annual Report, 1988
( 0) |
| [8] |
Weber R, Fragner E.Combined GLONASS Orbits[C].IGS International GLONASS Experiment IGEX-98 Workshop, Tennessee, USA, 1999
( 0) |
| [9] |
陈康慷.IGS分析中心轨道/钟差产品综合及网解模式动态精密单点定位研究[D].西安: 长安大学, 2014 (Chen Kangkang.Studies on the Orbit/Clock Combination of IGS Analysis Centers and Kinematic Precise Point Positioning Based on Local GNSS Network[D].Xi'an: Chang'an University, 2014)
( 0) |
| [10] |
Springer T A, Zumberge J F, Kouba J.The IGS Analysis Products and the Consistency of the Combined Solutions[C].Citeseer, 1998
( 0) |
| [11] |
GPS ICD.GPS Interface Control Document[Z].Navstar GPS Space Segment/Navigation User Interfaces, 1993
( 0) |
| [12] |
Ferland R, Piraszewski M. The IGS-Combined Station Coordinates, Earth Rotation Parameters and Apparent Geocenter[J]. Journal of Geodesy., 2009, 83(3): 385-392
( 0) |
2. Collaborative Innovation Center of Geospatial Technology, 129 Luoyu Road, Wuhan 430079, China