 2017, Vol. 37
2017, Vol. 37


2. 信息工程大学地理空间信息学院,郑州市科学大道62号,450001
北斗卫星导航系统(Beidou navigation satellite system,BDS)和惯性导航系统(inertial navigation system,INS)组合后可提高系统的导航精度、导航效率、容错能力和完好性[1-4],在众多领域得到广泛应用。根据应用需求及参与组合时观测量的不同,BDS/INS组合导航有松、紧、深3种组合模式[1-5]。深组合便于BDS与INS进行一体化设计,实现“芯片级”融合,在抗干扰和动态跟踪性能上更优,是众多学者研究的重点。文献[2-7]仅就深组合导航某一方面的性能进行分析,存在一定局限性。
为全面分析BDS/INS深组合导航性能,本文首先重点分析INS辅助BDS捕获、跟踪环路机理及性能评判准则,给出BDS/INS深组合结构设计,最后基于软件接收机进行BDS/INS深组合导航系统的整体性能分析,为后续工程化应用提供相关支撑。
1 INS辅助BDS机理及评判准则为满足BDS/INS深组合导航系统的高动态、强抗干扰能力,提升其在恶劣环境中的导航能力,实现BDS信号的快速捕获是其重要前提和基础。利用INS辅助BDS信号捕获可以大大缩短信号捕获时间,提高捕获能力。为维持高动态、强干扰环境下BDS接收机环路的稳定跟踪,采用INS解算的用户动态信息辅助BDS接收机跟踪环路,可以提高BDS接收机环路跟踪的稳定性,有效增强其抗干扰能力。
1.1 INS辅助BDS捕获INS辅助BDS信号捕获的结构示意如图 1所示。利用INS导航解算得到当前历元时刻用户的位置和速度信息,结合由卫星星历数据得到的卫星位置、速度信息,计算得到用户至卫星视线方向的单位矢量和伪距信息,进而得到视线方向上的多普勒频移和码相位偏移,以此作为搜索范围的中心,并根据INS解算的位置和速度信息的不确定度来设定搜索范围,控制本地码/载波数控振荡器在此范围内进行搜索,从而缩短BDS接收机信号捕获的时间,提高其信号捕获的性能。

|
图 1 INS辅助BDS信号捕获结构图 Fig. 1 INS assisted BDS signal capture |
这里采用信号捕获灵敏度及平均捕获时间来分析INS辅助BDS的捕获性能。当检测概率一定时,信噪比越低,灵敏度就越高[2, 8]。信号捕获检测概率[9]表示为:

|
(1) |

|
(2) |
|
(3) |
式中,Vt为检测门限, T为相干积分时间, a为信噪比, |δτ|/Tc为码估计偏差, Δf为多普勒频移估计误差。
平均捕获时间T表示为:

|
(4) |
式中,Pd为检测概率, Pfa为虚警概率, Kp为损失因子, T为相干积分时间, Ncell为搜索单元数:

|
(5) |
式中,func、tunc分别为时域和频域的搜索范围, fbin为频率搜索步长, tbin为码移搜索步长。
1.2 INS辅助BDS跟踪环路INS辅助BDS接收机跟踪环路的结构示意如图 2所示。利用INS解算的位置和速度信息,结合BDS星历信息得到的卫星位置和速度信息,计算得到用户至卫星视线方向的多普勒频移信息。将其输入到载波数控振荡器NCO(numerical controlled oscillator)中,以减弱BDS信号的多普勒频移,使BDS接收机载波跟踪的动态性减小。载波环路带宽变窄,可有效提高BDS接收机在高动态条件下的跟踪性能和抗干扰能力,增强BDS接收机的实用性。

|
图 2 INS辅助BDS接收机载波跟踪环路结构图 Fig. 2 Carrier tracking loop for INS assisted BDS receiver |
这里采用PLL(phase locked loop)跟踪误差来分析INS辅助BDS的相位跟踪性能。PLL跟踪环的1σ经验门限表示为:

|
(6) |
式中,σtPLL为热噪声,θA为由Allan偏差引起的振荡器颤动,σv为由振动引起的振荡器颤动,θe为动态应力误差。由于INS辅助消除了用户动态性能的影响,只需考虑辅助频率偏差和外部噪声。
采用载波跟踪过程中PLI(phase lock indicator)值的变化来分析INS辅助BDS载波跟踪性能[9]:

|
(7) |
深组合的核心思想是利用相关器残差来更新导航参数,利用更新后的导航参数预测BDS信号跟踪环路参数。集中式深组合导航系统,其组合导航滤波器的量测值为基带I/Q信息与惯性导航估计的I/Q信息之差。从信息融合最优准则角度考虑,集中式深组合导航系统在导航性能提升层面是最优的。BDS/INS深组合导航结构如图 3所示。

|
图 3 BDS/INS深组合结构图 Fig. 3 BDS/INS deep combination |
从图 3可以看出,这种组合模式将导航参数估计与BDS信号跟踪融合在一起,可同时跟踪处理所有可视北斗卫星信号。组合导航系统可以充分利用INS短时精度高的特点,提供准确的动态信息,增强BDS接收机对动态应力的适应性,减小BDS信号跟踪环路的带宽。同时利用导航滤波器输出信息修正INS, 使BDS接收机跟踪环路仅跟踪由INS解算误差、BDS接收机晶振、外部噪声等导致的多普勒移移误差,有效提高BDS信号跟踪精度。当BDS信号受干扰或遮挡时,INS测量值可以满足无缝导航,同时组合导航系统可以预测载体的动态信息,对BDS信号的Doppler和相位偏移信息进行连续预测,可显著减小BDS接收机重新捕获的时间。
3 滤波器算法设计 3.1 系统状态方程BDS/INS深组合导航滤波器的状态变量为INS的位置误差、速度误差、姿态误差、陀螺仪随机常值漂移、加速度计随机常值偏置、BDS接收机钟差和钟漂。对应的状态方程为[2]:

|
(8) |
式中,X=[XI XB]T为状态变量,F=

BDS/INS深组合导航滤波器的量测信息选取Z={INS估计值-BDS测量值},表示为:

|
(9) |
式中,dIINS和dQINS分别为由INS解算误差引起的INS预测I和Q值的偏差,ηI和ηQ分别为BDS接收机相关器输出的I和Q信号值的噪声,下标i为BDS接收机跟踪通道数。
基于以下两步完成INS预测的I和Q信号计算。
1) 将INS估计的位置、速度信息和卫星星历信息分别代入下式,得到载波角频率误差和相位误差:

|
(10) |

|
(11) |
2) 将计算得到的角频率误差和相位误差代入到下式,得到I和Q信号:
|
(12) |

|
(13) |
Kalman滤波器的量测更新需要建立量测值与误差向量间的数学关系, 相关向量形式参考文献[2]。
3.3 滤波算法由于BDS/INS深组合导航系统中状态变量与量测信息呈非线性关系,在构建量测方程时要对非线性函数求偏导,因此,在集中式深组合导航滤波器中采用UKF算法,可以减少线性化误差,提高滤波性能。具体表达式见文献[2]。
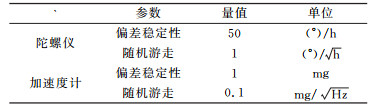
4 性能仿真分析为了对BDS/INS深组合导航系统性能进行全面分析,基于软件接收机搭建了深组合导航平台。BDS信号采用BDS星座B1I信号,码速率为2.046 Mcps,选用的参考时刻为2015-10-09 12:00:00,卫星高度截止角为15°,BDS中频模拟信号的采样频率为30 mHz,中频频率为4.092 mHz,预检测积分为1 ms。模拟低精度的INS器件特性参数见表 1,其更新频率为100 Hz。模拟载体速度为1 200 m/s,加速度为100 m/s2,姿态角均为0°。初始位置信息为东经112°、北纬34°,高程为100 m;初始位置误差为2 m,初始速度误差为0.1 m/s,初始对准姿态角误差为0.1°;仿真时间为120 s。这里设计了以下3组仿真实验。
|
|
表 1 INS器件特征参数 Tab. 1 Characteristic parameters of INS devices |
1) 实验一:INS辅助BDS捕获性能分析
为了更直观地分析INS对BDS信号捕获性能的影响,此仿真实验中INS单独导航,当虚警概率为0.01时,BDS信号捕获检测概率随着时间、载噪比变化的三维曲线如图 4所示。

|
图 4 INS辅助BDS信号捕获的性能曲线(T=1 ms) Fig. 4 Performance of INS-assisted BDS signal acquisition(T=1 ms) |
从图 4可以看出,INS单独导航时,BDS信号捕获检测概率随着信号载噪增高而增大;在信号载噪比一定时,BDS信号检测概率随着INS独立导航时间的增长而逐渐降低,在仿真的120 s时间内,INS仍能对BDS进行有效的辅助捕获。
为了定量对比分析有无INS辅助下BDS信号的捕获性能,在INS独立解算120 s后参与辅助BDS信号捕获。预检测积分时间为1 ms时有无INS辅助的BDS信号捕获性能对比如图 5所示。

|
图 5 有无INS辅助时捕获性能比对(T=1 ms) Fig. 5 Performance comparison by two schemes |
从图 5可以看出,在信号载噪比一定的情况下,有INS辅助下的BDS信号捕获检测概率高于无辅助时的信号捕获检测概率;当信号捕获检测概率为0.95时,无INS辅助下的BDS信号捕获灵敏度约为43.8 dB-Hz,而有INS辅助下的BDS捕获灵敏度约为39.6 dB-Hz,INS辅助可以提高约4.2 dB-Hz的捕获灵敏度。
有无INS辅助下的平均捕获时间对比如图 6所示。

|
图 6 有无INS辅助时平均捕获时间对比 Fig. 6 Average acquisition time by two schemes |
从图 6可以看出,在信号载噪比大于46 dB-Hz时,INS辅助的BDS信号捕获稳态时间为20 s,而无辅助时信号捕获时间为43 s,显示出INS辅助可以显著缩短BDS接收机的平均捕获时间。
2) 实验二:INS辅助BDS跟踪环路性能分析
此仿真实验中INS单独导航,当预检测积分时间为1 ms、环路带宽设为2 Hz时,BDS接收机跟踪性能随着时间、载噪比变化的三维曲线如图 7所示。

|
图 7 INS辅助GNSS接收机跟踪性能 Fig. 7 Performance of INS assisted GNSS receiver tracking |
从图 7可以看出,在信号载噪比为25 dB-Hz时,INS独立解算26 s时参与辅助仍能保持对跟踪环路的锁定;在信号载噪比为30 dB-Hz时,这一时间可以延长至30 s;在信号载噪比为40 dB-Hz时,这一时间为31 s。采用INS辅助BDS接收机跟踪环路,可以维持环路处于锁定跟踪状态;但由于低精度INS的误差随着时间增长而增大,辅助环路效果较差。
对7号北斗卫星的Doppler频移估计误差如图 8所示,跟踪过程的PLI值变化如图 9所示。

|
图 8 多普勒频移估计误差(SV=7) Fig. 8 Doppler shift estimation error(SV=7) |

|
图 9 PLI值的变化(SV=7) Fig. 9 PLI values(SV=7) |
从图 8、图 9可以看出,多普勒频移估计误差控制在4 Hz以内,跟踪过程的PLI值接近1,跳变发生在用户由加速阶段向匀速阶段过渡和匀速阶段向减速阶段过渡时。在INS辅助下,能满足BDS信号跟踪精度的要求,维持卫星信号的持续跟踪。
3) 实验三:BDS/INS深组合导航性能分析
以仿真的标称运动轨迹作为真值,为了更准确地反映深组合导航系统的性能,这里仿真时间延长至3 600 s,深组合导航位置、速度、姿态误差分别如图 10、图 11、图 12所示。

|
图 10 深组合导航的位置误差 Fig. 10 Deep integrated navigation position error |

|
图 11 深组合导航的速度误差 Fig. 11 Deep integrated navigation speed error |

|
图 12 深组合导航的姿态误差 Fig. 12 Deep integrated navigation attitude error |
从图 10~12可以看出,东向和北向位置精度优于1 m、天向位置精度基本控制在2 m以内;东向和北向速度误差优于0.1 m/s、天向速度误差优于0.2 m/s;姿态误差控制在200″。BDS/INS深组合导航系统可以提供较高的导航精度。
5 结语本文对BDS/INS深组合导航进行了较为全面的性能分析。实验表明,在INS辅助下可以显著提高BDS信号捕获灵敏度、缩短平均捕获时间、维持环路的锁定跟踪状态,说明BDS/INS深组合导航系统可以提高导航精度。这里考虑的是极端情况下,如GNSS接收机受到超强干扰或卫星信号受到持续遮挡时,GNSS/INS深组合导航系统自动调整为INS独立工作模式下的性能分析,当GNSS接收机可以收到卫星信号时,计算结果要好于该仿真结果。
| [1] |
王新龙, 于洁. 基于矢量跟踪的SINS/GPS深组合导航方法[J]. 中国惯性技术学报, 2009, 17(6): 710-717 (Wang Xin-long, Yu Jie. Deeply SINS/GPS Integrated Navigation Method Based on Vector Tracking[J]. Journal of Chinese Interial Technology, 2009, 17(6): 710-717)
(  0) 0) |
| [2] |
陈坡. BDS/INS深组合导航理论与方法研究[D].郑州: 信息工程大学, 2013 (Chen Po. Research on Theories and Methods of Deeply Coupled GNSS/INS Integrated Navigation[D]. Zhengzhou: Information Engineering University, 2013)
( 0) |
| [3] |
陈坡, 孙付平, 李海峰, 等. 采用多信息源的超紧能组合导航系统性能分析[J]. 导航定位学报, 2013, 1(4): 26-30 (Chen Po, Sun Fuping, Li Haifeng, et al. Performance Analysis of Ultra-Tightly Integrated INS/GPS/BDS[J]. Journal of Navigation and Positioning, 2013, 1(4): 26-30 DOI:10.3969/j.issn.2095-4999.2013.04.007)
( 0) |
| [4] |
陈坡, 孙付平, 郝万亮, 等.BDS/INS深组合导航系统性能分析[C]. CSNC2012, 广州, 2012 (Chen Po, Sun Fuping, Hao Wanliang, et al. Perforamnce Analysis Deep Interated GNSS/INS[C]. CSNC2012, Guangzhou, 2012)
( 0) |
| [5] |
唐康华, 吴美平, 胡小平. INS辅助的高性能GPS接收机设计[J]. 测绘学报, 2008, 37(1): 128-134 (Tang Kanghua, Wu Meiping, Hu Xiaoping. Design of MEMS IMU Aided High-performance GPS Receiver[J]. Acta Geodaetica et Cartographica Sinica, 2008, 37(1): 128-134 DOI:10.3321/j.issn:1001-1595.2008.01.022)
( 0) |
| [6] |
Jovancevic A, Brown A, Ganguly S, et al. Ultra Tight Coupling Implementation Using Real Time Software Receiver[C]. ION BDS 2004, Long Beach CA, 2004
( 0) |
| [7] |
Babu R, Wang J. Analysis of INS Derived Doppler Effects on Carrier Tracking Loop[J]. Journal of Navigation, 2005, 58(3): 493-507 DOI:10.1017/S0373463305003309
( 0) |
| [8] |
Babu R, Wang J. Ultra-Tight Integration of Pseudolites With INS[C]. IEEE/ION Plans 2006, San Diego CA, 2006
( 0) |
| [9] |
Sun D. Ultra-Tight GPS/Reduced IMU for Land Vehicle Navigation[D]. Canada: University of Calgary, 2010
( 0) |
2. School of Surveying and Mapping, Information Engineering University, 62 Kexue Road, Zhengzhou 450001, China