 2017, Vol. 37
2017, Vol. 37


GNSS和INS在导航上各具优势, 可通过组合导航方式弥补各自的劣势。根据观测量的不同, 有松组合、紧组合和深组合3种组合模式[1-4]。GNSS/INS深组合是一种深层次的、基于硬件层面的组合方式, 实现了INS导航参数与GNSS接收机相关器输出的I/Q信号的融合, 利用修正后的导航信息来控制、调整码/载波数控振荡器(NCO), 在满足动态性能指标的前提下, 减小跟踪环路带宽, 提高接收机的抗噪能力[2-9]。GNSS/INS深组合模式降低了INS对精度的要求, 并在结构设计上具有优势, 这就为微电子机械系统(micro-electro-mechanical system, MEMS)IMU参与组合提供了可能。目前, BDS已经在亚太区域得到广泛应用, 国内MEMS IMU研究工作也取得了较大进展, 采用硬件集成技术对BDS/MEMS IMU深组合导航系统进行芯片级的改造, 不仅有利于强干扰、超高动态应用背景下的精确制导武器现代化改造, 在民用领域也有广阔的应用前景。
基于软件接收机的BDS/MEMS深组合导航系统提供了一个开放的信号处理平台, 便于进行深组合导航滤波算法的研究, 方便深组合系统的设计及性能验证分析。本文尝试用软件接收机进行BDS/MEMS深组合导航系统算法分析, 为后续工程化应用提供技术依据。
1 BDS软件接收机结构BDS软件接收机是软件无线电在北斗卫星导航领域的具体体现[3, 8]。基于软件的接收机系统首先采用硬件和射频前端实现获取、滤波变频BDS数据, 再利用模数转换模块给出中频信号, 并基于软件的策略完成BDS数据的截取、信号跟踪、信号电文调制解调、量测数据输出以及参数计算等[5, 9]。BDS软件接收机结构见图 1。

|
图 1 软件接收机结构框图 Fig. 1 Software receiver frame |
数据截获是按照一定的搜寻策略遍历全部北斗导航卫星, 实现导航数据多普勒频移和伪码相位的估计与检测[7-8]。信号实时跟踪通过伪码跟踪环和载波跟踪环来具体实现, 其核心是将原始数据与本地码偏移和载波频率完全同步, 以便获得精确的量测数据和导航电文数据, 完成数据计算[2, 9-11], 其具体工作流程见图 2。

|
图 2 BDS软件接收机工作流程图 Fig. 2 BDS software receiver work flow |
深组合的中心思想是通过设计相关器残差实现参数计算, 并基于此进行北斗卫星数据跟踪环路的数据估计。通常有2种设计方案[7, 11-12]:一种是级联式深组合导航系统, 其组合导航滤波器的量测值为经基带信号预处理滤波器处理后的基带I/Q信息; 另一种是集中式深组合导航系统, 其组合导航滤波器的量测值为基带I/Q信息与惯性导航估计的I/Q信息之差。本文以集中式深组合导航系统为例进行分析。BDS/MEMS IMU深组合导航结构见图 3。

|
图 3 BDS/MEMS IMU深组合结构图 Fig. 3 BDS/MEMS IMU deep integration frame |
从图 3可以看出, 这种组合模式将导航参数估计与BDS信号跟踪融合在一起, 可在同一时刻遍历全部北斗卫星观测数据。基于MEMS IMU短时间内的高精度导航优势, 依靠其确定载体的运动状态, 提高接收机对系统动态性能的稳定性, 降低北斗信号跟踪环路的带宽。同时, 利用导航滤波器输出信息修正MEMS IMU, 使BDS接收机跟踪环路仅跟踪由MEMS IMU解算误差、BDS接收机晶振、外界干扰等产生的Doppler频移误差, 进一步改善跟踪精度。当北斗信号受干扰或丢失时, 仍然可以凭借MEMS IMU的观测数据继续导航, 并对北斗卫星观测数据的Doppler和相位偏移数据进行持续估计, 大大降低接收机再次截取数据的时间。
3 滤波器算法设计 3.1 系统状态方程全面分析BDS/MEMS IMU深组合导航系统, 为进一步提高导航滤波精度, 依据导航系统滤波器设计原则, 选择MEMS IMU的各项相关误差项作为状态变量, 其状态方程为[13-14]:

|
(1) |
式中, X=[XI XB]T为状态变量, F= 
MEMS IMU误差状态方程为:

|
(2) |
式中, XI=[δL δλ δh δvE δvN δvU φE φN φU εx εy εz 

BDS的误差状态主要包括与接收机钟误差等效的距离误差δtu和与接收机钟频率误差等效的距离率误差δtru, 其状态方程表示为:

|
(3) |
式中, XB=[δtu δtru]T, WB=[wtu wtru]T, FB= 

|
(4) |
式中, Xk、Xk, k-1分别为k和k-1时刻的状态向量, Φk, k-1为经过离散化处理后的状态转移矩阵, Wk为系统状态方程噪声向量, 具体描述参考文献[6, 8, 11]。
3.2 系统量测方程集中式深组合模型的关键是建立准确的量测模型, 其核心思想是选择1个过渡变量进行偏微分求导, 进一步明确I/Q数据与INS数据之间的关系, 建立I/Q数据与其位置和速度的数学关系, 得到滤波器的观测方程。
BDS/MEMS IMU深组合导航滤波器的量测信息选取Z={IMU估计值-BDS测量值}, 表示为:
|
(5) |
式中, dIIMU和dQIMU为由IMU计算误差导致的IMU对I与Q数据的估计偏差, ηI与ηQ为接收机相关器产生的I与Q数据噪声, ηI=N(0, 1), ηQ=N(0, 1), 2类噪声都是属于高斯分布的零均值白噪声[9], i为接收机跟踪信道的频道数。
I与Q数据的实现分2步估计:
1) 将IMU预测的位置和速度数据以及星历数据全部代入下式, 得到与载波角频率和相位相关的误差信息:
|
(6) |

|
(7) |
2) 将第1步的相关误差信息代入下式, 得到所要求的信号数据:

|
(8) |

|
(9) |
BDS接收机相关器输出的基带I/Q信息获取参考文献[11]。
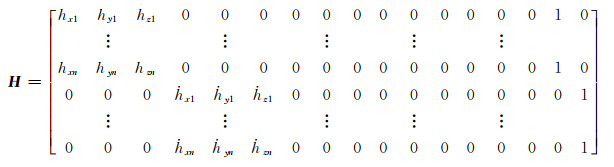
根据系统状态方程和观测方程特点, 卡尔曼滤波器的观测矩阵具体描述如下:
|
(10) |
其中,

|
(11) |

|
(12) |

|
(13) |

|
(14) |

|
(15) |

|
(16) |
hx建立I信号与位置分量dPx的关系, 
滤波系统方程和观测信息中存在非线性特点, 标准卡尔曼不能满足滤波要求。为了避免EKF过程存在雅克比矩阵的求解, 采用无迹卡尔曼算法进行迭代滤波, 减少滤波收敛时间, 进一步提高滤波精度。具体迭代过程如下。
1) 状态参数初始化:
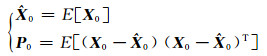
|
(17) |
2) 计算sigma点:
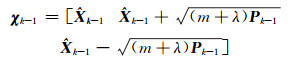
|
(18) |
3) 计算时间更新方程:
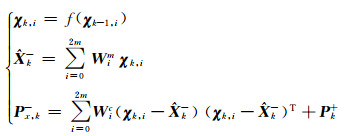
|
(19) |
4) 计算量测更新方程:
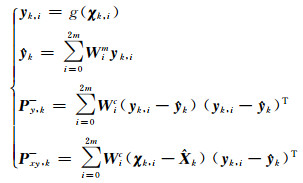
|
(20) |
5) 滤波更新:

|
(21) |
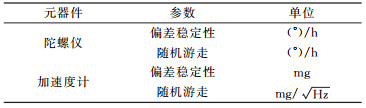
为了验证BDS/MEMS IMU深组合导航系统性能, 基于系统原理和环境特性设计开发仿真平台, 其主要功能包括:标称轨迹的生成、中频北斗卫星信号仿真、模拟北斗卫星软件接收机、多精度IMU数据仿真、惯性导航计算等。BDS信号采用BDS星座B1频点信号, 码速率为2.046 mHz, 选用的参考时刻为2015-09-09 00:00:00, 卫星截止高度角取15°, 频点模拟信号的采样频率为30 mHz, 中频频率为7 mHz, 预检测积分为1 ms, 组合周期为1 s。模拟MEMS IMU系统元件数据见表 1, 迭代频率为100 Hz。仿真初始运动速度为1 000 m/s, 初始运动加速度为100 m/s2, 姿态方位角全部为0°。初始方位数据为东经108°、北纬39°, 高程为200 m, 初始方位误差信息为2 m, 初始速度误差为0.1 m/s, 初始对准姿态角误差为0.1°。模拟实验时长为200 s, 以模拟实验的理论运动轨迹为标准值, 仿真结果与BDS/MEMS IMU紧组合导航系统进行比较。
|
|
表 1 MEMS IMU器件特征参数 Tab. 1 MEMS IMU device characteristic parameter |
考虑3个方向的误差较为一致, 选择纬度的位置误差和东向速度误差进行分析, 结果见图 4和图 5。表 2是BDS/MEMS IMU深、紧组合导航位置、速度误差RMS比较。

|
图 4 纬度方向的位置误差曲线图 Fig. 4 Position error curve of latitude direction |

|
图 5 东方向速度误差曲线 Fig. 5 Position error curve of east direction |
|
|
表 2 RMS比较 Tab. 2 Comparision of RMS |

从仿真结果比较可以看出:
1) BDS/MEMS IMU深组合系统的位置和速度误差能够进入较为准确的区间内, 位置误差小于1 m, 速度误差小于0.01 m/s, 并且收敛时间较短。
2) 在高动态条件下, 就BDS/MEMS IMU导航系统而言, 其深组合的导航精度较紧组合的导航精度有较大提高。
5 结语本文基于软件接收机在处理基带数据方面具有良好特性的优点, 对BDS/MEMS IMU深组合导航的性能进行分析。考虑到组合导航系统中状态变量与量测信息呈非线性关系, 采用UKF算法进行滤波器设计。仿真实验结果表明, 在高动态条件下, 就BDS/MEMS IMU导航系统而言, 其深组合的导航精度较紧组合的导航精度有较大提高, 且其位置和速度误差能够进入较为准确的区间内, 位置误差小于1 m, 速度误差小于0.01 m/s。本文分析结果为进一步开发BDS/MEMS IMU深组合导航系统提供了理论借鉴。
| [1] |
王君, 高鹏, 富立.基于速度辅助跟踪环路的GNSS/INS超紧组合导航系统研究[C].中国卫星导航学术年会, 上海, 2011 (Wang Jun, Gao Peng, Fu Li.Research on GNSS/INS Ultra Tight Integrated Navigation System Based on Speed Aided Tracking Loop[C]. CSNC, Shanghai, 2011)
(  0) 0) |
| [2] |
王新龙, 于洁. 基于矢量跟踪的SINS/GPS深组合导航方法[J]. 中国惯性技术学报, 2009, 17(6): 710-717 (Wang Xinlong, Yu Jie. SINS/GPS Deep Integration Navigation Method Based on Vector Tracking[J]. Journal of Chinese Inertial Technology, 2009, 17(6): 710-717)
( 0) |
| [3] |
贾超广, 肖海霞. 基于卫星信号模拟器的北斗接收机性能测试与分析[J]. 导航定位学报, 2013, 1(4): 14-17 (Jia Chaoguang, Xiao Haixia. Performance Test and Analysis of the Beidou Receiver Based on the Satellite Signal Simulator[J]. Journal of Navigation and Positioning, 2013, 1(4): 14-17 DOI:10.3969/j.issn.2095-4999.2013.04.004)
( 0) |
| [4] |
唐康华, 吴美平, 胡小平. MEMS IMU辅助的高性能GPS接收机设计[J]. 测绘学报, 2008, 37(1): 128-134 (Tang Kanghua, Wu Meiping, Hu Xiaoping. Design of High Performance GPS Receiver Aided by IMU MEMS[J]. Acta Geodaetica et Cartographica Sinica, 2008, 37(1): 128-134 DOI:10.3321/j.issn:1001-1595.2008.01.022)
( 0) |
| [5] |
高鹏, 闫立伟, 富立, 等.一种微惯性/软件接收机超紧组合方案研究[C].中国卫星导航学术年会, 北京, 2010 (Gao Peng, Yan Liwei, Fu Li, et al. Research on a Super Compact Combination Scheme of Micro Inertial/Software Receiver[C]. CSNC, Beijing, 2010))
( 0) |
| [6] |
Jovancevic A, Brown A, Ganguly S, et al. Ultra Tight Coupling Implementation Using Real Time Software Receiver[C].ION GNSS, Los Angeles, 2004
( 0) |
| [7] |
Babu R, Wang J L. Analysis of INS Derived Doppler Effects on Carrier Tracking Loop[J]. Journal of Navigation, 2005, 58(3): 493-507 DOI:10.1017/S0373463305003309
( 0) |
| [8] |
Babu R, Wang J L. Ultra-Tight Integration of Pseudolites With INS[C]. IEEE/ION Position, Location, and Navigation Symposium, San Diego, 2006
( 0) |
| [9] |
Sun D B. Ultra-Tight GPS/Reduced IMU for Land Vehicle Navigation[D]. Calgary: University of Calgary, 2010
( 0) |
| [10] |
祖秉法."北斗二号"民用软件接收机关键技术研究[D].哈尔滨: 哈尔滨工程大学, 2010 (Zu Bingfa.Research on the Key Technology of "Beidou 2" Civil Software Receiver[D].Harbin: Harbin Engineering University, 2010) http://cdmd.cnki.com.cn/Article/CDMD-10217-1011021313.htm
( 0) |
| [11] |
陈坡. GNSS/INS深组合导航理论与方法研究[D].郑州: 信息工程大学, 2013 (Chen Po. Research on Theory and Method of GNSS/INS Deep Integration Navigation [D].Zhengzhou: Information Engineering University, 2013) http://xuewen.cnki.net/CDFD-1013353747.nh.html
( 0) |
| [12] |
王新龙, 于洁.SINS辅助GPS软件接收机的设计与实现[C].中国卫星导航学术年会, 北京, 2010 (Wang Xinlong, Yu Jie. The Design and Implementation of SINS Aided GPS Software Receiver[C].CSNC, Beijing, 2010)
( 0) |
| [13] |
何晓峰.北斗/微惯性组合导航方法研究[D].长沙: 国防科学技术大学, 2009 (He Xiaofeng. Research on Beidou / Micro Inertial Integrated Navigation System[D].Changsha: National University of Defense Technology, 2009) http://cdmd.cnki.com.cn/Article/CDMD-90002-2010147294.htm
( 0) |
| [14] |
文立, 李荣冰, 刘建业.基于北斗二代的多导航星座的惯性深组合算法研究[C].中国卫星导航学术年会, 北京, 2010 (Wen Li, Li Rongbing, Liu Jianye. Research on the Inertial Deep Interation Algorithm Based on the Beidou 2 Multi Navigation Constellation[C]. CSNC, Beijing, 2010)
( 0) |
| [15] |
Woessner W, Noronha J, Jovancevic A, et al. A Software Defined Real-Time Ultra-Tightly Coupled (UTC) GNSS-INS Architecture[C].The 19th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, 2006
( 0) |
| [16] |
董俊杰.基于Matlab的北斗二代B1频点软件接收机研究与实现[D].西安: 长安大学, 2014 (Dong Junjie. Research and Implementation of the B1 Frequency Point Software Receiver of Beidou 2 Based on Matlab[D].Xi'an: Chang'an University, 2014)
( 0) |