


2. 空间数据挖掘与信息共享教育部重点实验室, 福建 福州 350002;
3. 福州大学数字中国研究院, 福建 福州 350002
2. Key Laboratory of Spatial Data Mining and Information Sharing of Ministry of Education, Fuzhou University, Fuzhou 350002, China;
3. Academy of Digital China, Fuzhou University, Fuzhou 350002, China
实线型交通标线主要包括车行道边缘线和禁止跨越分界线,是重要的道路安全附属设施, 其所传达的信息对规范交通行为、指示道路状况、保障道路功效、引导行人和安全驾驶等方面具有重要的作用,是交通安全与管理、精确导航和辅助驾驶等应用的重要基础数据[1-2]。随着车载激光扫描系统(mobile lidar system, MLS)的快速发展,车载激光扫描系统不仅能够快速获取道路及其周围环境的三维信息,还能提供地物对激光的反射强度信息,为实线型交通标线的识别和更新提供了一种新数据源。
相较于周围地面点云,交通标线对激光呈高亮反射,具有较大的反射强度值。一些学者基于三维点云转化获得的地理参考强度图像完成标线点云分割和提取。如文献[3-4]基于二维强度特征图像利用图像处理相关技术,如Ostu、Canny等算子分割和提取标线,结合几何形状信息优化分割结果从而完成对标线的检测。文献[5]针对强度特征图,考虑到几何因素对强度的影响,采用基于密度分布的多阈值分割方法实现标线的自动分割。为了进一步提高分割精度,文献[6]提出基于强度特征图,通过邻域权重差异估计获得自适应阈值实现标线的粗分割,并利用二维多尺度张量投票机制抑制噪声从而完成标线的精确分割。但这类方法提取交通标线的精度易受特征图像分辨率影响。于是一些学者则逐点分析局部区域中地面与标线的反射强度差异完成标线点云的分割和提取[7-9]。如文献[9]基于峰值检测法提取扫描线的强度值作为道路标线点。该方法虽然能够快速提取标线,但未考虑强度分布不均情况。文献[7]则基于分快处理策略,通过多阈值分割和空间密度滤波直接从路面点云中获得标线,并利用标线的空间形状、几何结构及空间语义结构等信息提取交通标线。文献[10]基于几何形状特征与标线间交互关系,利用模型和数据驱动马尔科夫链蒙特卡洛算法构建能量函数,实现标线自动分类。但是目前基于车载激光点云的标线提取多聚焦于虚线型标线,对于实线型标线研究较少。相较于虚线型标线,实线型标线所处的道路环境、类型更为复杂,也更易受磨损、遮挡、路口虚线和斑马线的干扰和影响,实线型标线的提取和识别更为困难。
车载激光扫描系统获取的反射强度信息多为未经改正或归一化的强度信息,反射强度信息不仅与介质表面反射率相关,还受扫描仪特性、几何结构(扫描距离、激光入射角)、材质新旧磨损、行驶环境等因素影响[11-12],存在同物异谱和异物同谱现象,直接用于标线分割难以得到较高精度。因此,通过强度改正[5, 13-15]或强度去噪[16-17]等方法,提升同类地物的强度一致性,增强不同类型地物的强度差异。车载激光点云的强度改正多基于数据驱动,不考虑激光扫描的物理背景,通过拟合强度与各影响因子之间关系建立模型进行强度改正[11, 13-15]。文献[11]采用数据驱动方法,基于距离-强度关系,通过对比试验选择三次多项式构建校正模型,依据参考距离,利用比值法实现距离的相对校正。文献[17]则基于入射角-强度关系,利用车载激光扫描系统自带的激光扫描角绝对值做入射角,构建线性模型拟合二者关系,以模型值作为校正结果用于强度校正。这些校正模型能较好减弱扫描距离、入射角等几何因素对强度的影响,但单一线性关系或反比例关系校正模型难以描述和改正其他因素对强度的影响,也无法抑制路面磨损产生的强度噪声。对于反射强度信息中的高频噪声数据,目前多采用高斯滤波等图像滤波方法进行去除,从而平滑强度信息[16-17]。此类方法能够抑制点云强度中离散分布的噪声,但难以处理点云密度分布不均以及大面积椒盐噪声对强度信息的影响。
针对以上的问题,本文提出一种基于强度增强策略的实线型交通标线提取方法。采用多个模型组合的策略逐步改正距离、磨损等因素对地面反射强度的影响,增强标线点云的激光强度分布一致性,提升地面和标线点云反射强度的差异性。基于增强后的反射强度值,利用地面点云和标线的局部反射强度、空间分布差异,对标线进行分割。融合实线型标线的形状、结构和语义信息,优化分割结果,克服复杂道路环境下,斑马线、虚线型车道线对实线型标线识别的干扰,实现车载激光点云中实线型交通标线的精确提取和识别。
1 基于车载激光点云的实线型交通标线提取本文方法需要先对点云数据进行预处理,采用基于扫描线方法提取路面点云[18],计算各激光点与轨迹线的距离R,并根据轨迹线进行点云分段。然后逐段对路面进行强度增强,消除距离、磨损等因素对反射强度值影响,并集合多滤波器集成的策略进行强度变换和去噪,增强地面点云和标线的强度差异;基于增强后的反射强度,采用k均值聚类和连通分支聚类对标线进行分割,并利用归一化图割方法优化实线型交通标线与邻近标线形成的欠分割、过分割结果。最后利用实线型标线的语义信息和空间分布特征从分割后标线对象中识别实线型标线。该方法的主要流程如图 1所示。

|
| 图 1 车载激光点云中实线型交通标线提取流程 Fig. 1 The flow of solid traffic lanes extraction from MLS point clouds |
1.1 路面点云强度增强
相对于机载和地面激光扫描系统,车载激光扫描系统中扫描距离(入射角)、车速、材质新旧磨损程度等因子对点云反射强度的影响更为复杂,难以用单一的模型确定地物的几何特性和反射特性。本文融合多个模型逐步改正距离、材质、磨损等因素对地面强度的影响,使标线点云的激光强度趋于一致,增强地面和标线点云反射强度的差异性。
1.1.1 基于距离的点云强度校正根据激光反射特性,在一定扫描范围内,车载激光点云的反射强度信息随着扫描距离的增加而衰减,反射强度值与距离成反比关系。但是在远离激光扫描仪的边缘处,激光强度不与距离平方成反比关系,采用传统的比值法容易导致边缘处过校正。因此本文融合比值法和差值法,采用三次多项式函数构建强度-距离关系模型(f(R))校正强度,消除扫描距离对反射强度的影响[19]
 (1)
(1)
式中,ηi(i=0, 1, 2, 3)为三次多项式的参数,利用手工提取只包含地面点云的同质数据(homogeneous reflecting surface data),即受磨损程度相似的具有相同反射属性的同材质对象点云,采用最小二乘算法求解参数。
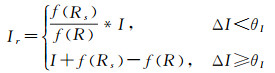
为了避免过校正,本文先采用比值法改正强度[20],通过计算各激光点校正前后强度差值ΔI,判断是否过校正:若强度差值ΔI大于阈值θI,则认为强度过校正,对过校正激光点采用差值法[21]进行校正,否则选用比值法进行强度校正;校正公式为
 (2)
(2)
式中,Rs为参考距离,为等间隔点云片段wd中最小距离;R为各激光点与轨迹线的距离;ΔI=I*f(Rs)/f(R)-I;校正阈值θI设置过小,易造成欠校正,反之,难以有效处理过校正,故本文设定θI=max(I)/2,即校正后强度增量不能超过原始点云中最大强度值的1/2。
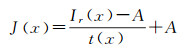
1.1.2 基于暗通道去雾原理的强度变换车载激光点云强度数据除受距离影响外,还存在大量由路面磨损产生的椒盐噪声。这些椒盐噪声使得路面点云强度失去高对比度与保真性,同图像中雾导致的低对比度和弱颜色保真性相似。因此本文将带有噪声反射的强度数据Ir(x)视作雾,基于暗通道去雾模型[22],如式(3)
 (3)
(3)
式中,A为大气光强度;t(x)为透射率。将其去雾复原成无雾数据J(x),即强度变换后强度值It。在去雾过程中,透射率t(x)经常取值较小,并认为取值越趋近于0时,退化求解的复原图像J(x)越接近于无雾图像。由于直接复原的无雾图像存在过饱和现象,一般赋予透射率t(x)一个最小边界值t0=0.1,使得无雾图像在输入图像浓雾区域保留一定的雾,呈现较为自然的图像视觉效果。则暗通道去雾模型修正为
 (4)
(4)
利用暗通道去雾原理去除噪声,需要估计透射率t(x),即估计反射强度数据中因磨损等原因形成的噪声信息。该噪声信息强度值大、分布广,本文通过将反射强度划分为m个区间,统计各区间中反射强度的分布频率p,将强度信息转化成噪声特征F(F=Ir*p)来计算透射率t(x)=F/max(F),并认为t值越大,磨损越严重(图 2)。同时以A=min(Ir)作为大气光强度,确保变换后噪声点云强度接近正常地面点云强度。

|
| 图 2 反射强度数据中透射率t(x)分布 Fig. 2 The distribution of transmittance rate t(x) of intensity data |
1.1.3 多滤波器集成强度去噪
经过距离校正和基于暗通道去雾的强度变换,可以纠正和增强大部分的反射强度信息,但仍会存在一些孤立噪声点。在车载激光点云中路面点密度分布不均,针对该情况,需要在滤除噪声的同时保留相应的标线点云,而单一滤波器难以同时在不同点密度区域取得较好的滤波效果。本文通过统计局部区域内点密度,依据阈值thc,将区域划分为高密度和低密度区域,采用多滤波器集成策略滤除孤立噪声。
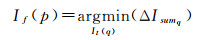
(1) 针对高密度区域噪声点分布较为集中,分析局部区域中强度相似性,统计中心点p中邻域S内各点q与其他点的强度差ΔIq之和ΔIsumq,以局部相似度最高即最小ΔIsumq值对应的激光点q的强度作为中心点p滤波后的强度If(p)为
 (5)
(5)
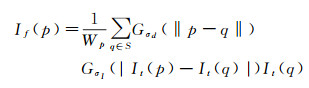
(2) 针对低密度区域中同质点云分布较为邻近,统计中心点p与邻域S内其他点q之间的空间邻近度和强度相似度,采用双边滤波器[23]平滑点云强度并保持标线强度特征
 (6)
(6)
式中,
经过上述距离改正、强度变换和强度去噪处理,能够解决车载激光点云中大部分区域中同质区域强度分布不均问题,提升同质点云强度一致性,增强非同质点云间强度差异性,有利于后续标线点云精确分割。
1.2 标线点云分割基于增强后的强度信息,利用k均值聚类[24]将标线与地面进行分离,并基于连通分支的距离聚类算法[25-26]生成标线对象。因空间邻接的原因,距离分割结果中存在实线型标线与其他对象欠分割的现象,同时存在因遮挡和磨损造成的过分割问题,需进一步优化标线分割结果。
1.2.1 实线型标线欠分割优化在道路路口区域中,实线型标线与停止线因空间邻接未分离,需要根据二者的空间分布特性,利用主方向,基于归一化割方法(Normalized Cuts)对其再进行分割[7]。
此外,在一些高速路口,实线型标线还经常与道路出入口标线连接在一起(如图 3(a))。针对此类问题,根据实线型标线的空间延续性,利用扫描线检测实线型标线:

|
| 图 3 道路出入口标线与实线型标线分离结果 Fig. 3 The segmentation results between entrance markings and solid lanes |
(1) 通过构建对象最小外接圆,以圆心O0到周边的线段生成等间隔分布的扫描线,并逐条提取扫描线上两端点构建上下边界位置(如图 3(b))。
(2) 判断待测点ptk+1与最邻近点ptk的邻近关系,若待测点ptk+1到最邻近点ptk切线Vk的距离dk不大于标线宽度阈值ws,则提取待测点为上下侧实线型标线;否则,为道路出入口标线(如图 3中(c)和(d))。
1.2.2 实线型标线过分割优化由于遮挡或道路磨损,实线型标线与道路出入口标线还存在过分割问题。针对该问题,本文基于长度将已提取的实线型标线划分为长边和短边(如图 4(a)),基于短边末点pt末的切线V末,构建长为2Ls,宽为4ws的感兴趣区域(如图 4(b))。提取与感兴趣区域相交的最邻近对象作为过分割对象,在待分割对象中提取与前短边主方向一致的点进行合并,更新短边并以此为基础依次合并下一个过分割对象进行优化(如图 4(c)和(d)),其中Ls为已获得出入口标线中相邻目标间距的均值。

|
| 图 4 过分割优化结果 Fig. 4 The Over-segmentation optimization results |
1.3 实线型交通标线提取与识别
在道路环境中,实线型标线的类型多为直线和曲线形状,本文利用分割后独立对象的空间分布、形状和道路场景语义信息提取和识别实线型标线,包括以下步骤:
(1) 种子对象初始化。由于实线型标线长度较长,本文以场景中所有对象长度中值mid_len构建阈值ths=2*mid_len,提取长度大于阈值ths的对象作为种子对象。
(2) 定义种子对象的吸引区域和排斥区域。根据Stroke原理[27],为保证线段的延续性和平滑性,两个实线型标线相连,则待连接对象应位于种子对象的延伸方向以保证较小的连接角度。因此,本文预先定义种子对象的排斥区域和吸引区域来连接待连接线段:以线段li中心mi为圆心,半径ri(ri=‖mi, pt末‖2)的圆形区域为排斥区域;以末点pt末的切线Vi为基准,构建宽度为4ws的缓冲区为吸引区域(如图 5)。

|
| 图 5 标线段连接示意图 Fig. 5 Overview of the road marking segments connection |
(3) 实线型标线连接。根据实线型标线的空间分布特性,若待连接线段位于吸引区域,不存在排斥区域中,且其切线方向与种子线段的切线方向夹角τij小于最大连接角度τmax,则被视为连接线段。如图 6中l1为种子对象,l2~l5为待测对象,因为l2处于排斥区域,{l1, l4}的夹角τij大于阈值τmax,因此对象l2与l4不满足条件;对象l3与l5满足条件,但{l1, l3}端点连线距离较短,因此对象l3为最佳连接目标。并以l3为种子对象用于连接下一个目标。

|
| 图 6 4份不同道路场景的试验数据 Fig. 6 Overview of the four test data sets road scenes |
(4) 结果优化。在路口场景中,一些斑马线和虚线型标线因邻近实线型标线,在以上连接过程中,部分斑马线或虚线型标线被误提取为实线型标线。本文利用斑马线和虚线型标线的长度(L)、主方向(v)和规则间距(G)信息构建道路场景语义信息剔除相关对象,优化提取结果,分别采取如下策略:
斑马线误提取场景。根据GB 5768—2009,若分割后对象p的长度小于7 m且在局部区域内存在与之平行的多个分割对象qi,则该对象p视作斑马线剔除(式(7))
 (7)
(7)
虚线型标线误提取场景。根据GB 5768—2009,大部分虚线在同一方向上等间隔分布,且长度基本小于7 m。因此,若在同一方向上存在连续三个分割对象,且长度和间距基本一致,则将其视为虚线剔除(式(8))
 (8)
(8)
式中,Gpqi和Gqiqi+1分别为分割对象qi与相邻分割对象p以及对象qi+1的间距。
2 试验与分析 2.1 试验数据为验证本文方法提取实线型标线可行性,采用4份不同道路场景车载激光点云数据进行试验(如图 6)。其中数据1为Lynx Mobile Mapper系统采集的街区环境数据,场景中标线受遮挡较多(如图 6(a)中①),同时地面存在不同程度磨损(如图 6(a)中②),且路面强度受距离衰减严重(如图 6(a)中③),路面强度信息分布不均;数据2为StreeMapper系统获取的高速公路场景,场景为辅道与主道分离区域,标线形状复杂,存在大量曲线型实线型标线,且路面磨损严重;数据3为Trimble系统获取的街区场景数据,由于地物遮挡以及其他因素影响,数据存在多处缺失,影响分割结果完整性;数据4为StreeMapper系统采集的街区场景数据,场景道路为水泥路面,地面与标线点云之间强度差异较小,且道路中央存在中间分隔带,边缘区域存在大量虚线型标线,不利于实线型标线的提取和识别。
2.2 试验结果分析为了避免建筑物、植被和交通附属设施等地物对目标提取的影响,本文先将离散点云生成扫描线,基于扫描线方法确定路面点云[18]。考虑分块过小,区域中无标线对象将会影响后续标线分割处理;反之,构建的校正模型难以适用整个分块,并影响算法效率。故本文以15 m作为处理单元(包括至少两组标线),人工提取受磨损程度相似的地面点云作为同质数据用于校正模型f(R)构建,从而完成路面点云强度增强。综合考虑算法效率与强度变换效果,在每个分段中设定强度距离区间数m为10;根据GB 5768—2009中标线宽度(0.2 m)设置格网宽度为0.2 m,距离阈值thd和ws为0.3 m;为了有效滤除高密度区域噪声并保留低密度区域中的标线点云,根据试验数据情况点密度thc取值为8,基于以上研究方法,采用如表 1参数设置,实现4份试验数据的实线型标线分割与提取。
| 参数 | m | rc | thc | wg | thd | ws | τmax |
| 参数描述 | 强度区间数量 | 邻域半径 | 点密度阈值 | 网格宽度 | 聚类距离 | 实线型标线宽度 | 最大连接角度 |
| 参数值 | 10 | 0.1 m | 8 | 0.2 m | 0.3 m | 0.3 m | 30° |
4份数据的增强结果如图 7所示。从中可以观察到,本文方法能够消除距离导致的强度衰减问题(如图 7(a)中③),同时能有效抑制道路磨损产生的强度噪声(如图 7(a)中①②和(b)中①)。此外,除了能够增强沥青路面点云强度(如图 7(c)),同时还能有效提升水泥地面与标线点云间强度差异(如图 7(d))。

|
| 图 7 强度增强结果 Fig. 7 The results of Intensity enhancement |
基于强度增强结果,采用k均值和归一化分割方法进行标线分割,并基于实线型标线形状、语义结构进行线段连接与优化,最后实线型标线提取结果如图 8所示。

|
| 图 8 实线型标线提取结果 Fig. 8 The solid lanes extraction results |
试验数据中的绝大部分实线型标线均被准确提取。本文方法不仅能有效提取完整的直线型目标(如数据3),同时对于不连续的直线型目标(如数据3中①②)和曲线型目标(如数据2中①)具有较好的识别效果,并对虚线型标线具有一定的抗干扰性(如数据3中③和数据4中②)。
虽然本文方法能够适用于大部分道路场景,但仍然存在部分误提取和漏提取实线型标线,如因道口磨损严重。尽管经过强度增强能纠正大部分的地面信息,但少数地面信息仍然能导致地面点强度异常被误识别为标线,从而被误提取(如图 9中场景A、场景E);由于少数标线点密度稀疏,难以生成完整对象,造成漏提取(如图 9中场景B);分割后标线分布孤立且长度较短,难以被检测(如图 9中场景C);同时少数标线与目标距离太近产生欠分割,容易被统一识别为实线型标线(如图 9中场景D)。

|
| 图 9 误提取和漏提取结果 Fig. 9 Overview of some subsets of misdetection and error detection |
2.3 试验结果分析与精度评价
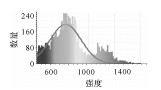
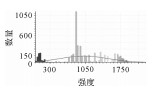
为了分析强度增强算法的有效性,本文统计强度增强前后的强度分布,其中图 10为局部区域中路面强度分布图,表 2为4份试验数据强度增强前后的统计数据表。如图 10所示,增强前,扫描线上标线点强度值分布不均,且与地面点云强度分布存在交叉(如图 10中(b));增强后,扫描线上地面点云强度值分布基本一致,标线点强度普遍高于地面点强度,二者交叉重叠现象得到有效抑制(如图 10中(c))。由表 2可知,4份数据原始点云强度分布较为散乱,其原始地面和标线点云强度值标准差均较大。强度增强后,二者强度值标准差均变小,分布更为集中。并且,二者强度分布具有明显区分性,如数据4中点云经过增强后,地面和标线点云强度值由原来交叉分布在2500和2800左右,转化到集中分布在75和750左右,强度差异性得到有效提升。在数据1中,主要是边缘处标线受距离衰减的影响,其中大部分标线点云强度值较大,因此增强前后标线点云强度分布基本一致。但标线点云强度最小值由58上升为450,说明强度增强消除了距离对强度的衰减影响。此外,数据4边缘区域标线磨损严重,增强后强度值虽然对比地面点云有较大差异,但相较于大部分道路中间区域的标线点云强度值仍然较小,故在400和600附近存在两个孤立分布。

|
| 图 10 局部路面点云强度增强前后强度分布 Fig. 10 The intensity distribution of the subset road surface points before and after intensity enhancement |
| 数据 | 地面点云强度分布 | 标线点云强度分布 | ||||
| 强度分布图 | 强度值分布 | 强度分布图 | 强度值分布 | |||
| 数据1 | 增强前 |  |
最小值:41 最大值:1209 标准差:89 |
 |
最小值:58 最大值:1650 标准差:254 |
|
| 增强后 |  |
最小值:32 最大值:450 标准差:30 |
 |
最小值:450 最大值:1660 标准差:232 |
||
| 数据2 | 增强前 |  |
最小值:10 最大值:31 030 标准差:2553 |
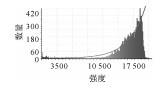 |
最小值:23 最大值:22 412 标准差:3718 |
|
| 增强后 |  |
最小值:10 最大值:720 标准差:818 |
 |
最小值:60 最大值:2242 标准差:468 |
||
| 数据3 | 增强前 | 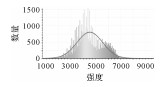 |
最小值:722 最大值:9662 标准差:1033 |
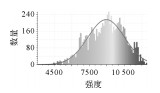 |
最小值:3064 最大值:12464 标准差:1546 |
|
| 增强后 |  |
最小值:35 最大值:666 标准差:76 |
 |
最小值:75 最大值:1984 标准差:281 |
||
| 数据4 | 增强前 | 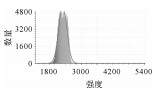 |
最小值:170 最大值:5425 标准差:155 |
 |
最小值:1765 最大值:3930 标准差:274 |
|
| 增强后 |  |
最小值:58 最大值:226 标准差:10 |
 |
最小值:85 最大值:976 标准差:141 |
||
由于没有真实参考数据,本文采用人工数字化实线型标线作为参考数据,以其总长度作为试验结果质量评价参考基准。同时采用准确率P、召回率R以及综合评价指标F1-Measure值作为评价指标,分析4份试验数据中实线型标线的提取精度(表 3)
 (9)
(9)
 (10)
(10)
 (11)
(11)
| 试验数据 | TP/m | FN/m | FP/m | P/(%) | R/(%) | F1-Measure/(%) |
| 数据1 | 2908.32 | 92.23 | 76.66 | 97.43 | 96.92 | 97.17 |
| 数据2 | 3522.87 | 57.66 | 147.53 | 95.98 | 98.38 | 97.16 |
| 数据3 | 1086.85 | 43.89 | 37.88 | 96.63 | 96.11 | 96.36 |
| 数据4 | 750.64 | 66.41 | 3.38 | 99.55 | 91.87 | 95.55 |
式中,TP为正确提取的长度,FP为错误提取的长度,FN为未被提取的长度。
从表 3中可以看出,数据4中实线型标线提取的准确率较高,这是因为其边缘区域路面状况较好,地面与标线点云区分性较好。但由于道路中间有大量的分隔带,漏提取情况较多,召回率相对较低。数据2由于受遮挡情况较少且点密度较大,分割后的标线相对完整,故其召回率较高。但由于路面磨损严重,即便经过强度增强,依然存在部分地面点被误提取为标线点,导致准确率较低。整体而言,在4份试验数据中,实线型标线提取结果的准确率达到95.98%,召回率达到91.87%,F1-Measure值达到95.55%,这表明本文方法能够从车载激光点云数据中精确提取绝大多数的实线型标线,不仅适用于规则道路环境,对于复杂的非规则道路环境也能取得较满意的结果。
由于目前没有仅针对实线型标线提取的方法,因此本文选取文献[7]中标线处理的相关研究,采用两份试验数据(如图 11)与本文方法进行分析对比,试验结果精度如表 4所示。对于样本数据1,本文方法存在实线型标线与停车位标线的欠分割问题(图 11(a)中#1),其准确率相比文献方法较低。但文献方法在道路边缘区域的增强效果有限,且只依据分割后标线长度进行目标提取,使得漏提取情况严重(如图 11(a)中#3,图 11(b)中#2和#4)。而本文方法在边缘区域对强度的增强较好,并适用于不连续、残缺目标的提取,其召回率、F1-Measure值均高于文献方法,进一步验证了本文方法有效性。

3 结论
本文结合比值法与差值法进行距离校正,消除几何因素对反射强度值影响。针对城市环境中,标线因长期使用、磨损等原因导致对激光的反射系数降低,存在与地面强度值接近以及大面积噪声等情况,采用暗通道去雾原理,并集合多滤波器集成的策略进行强度变换和去噪,增强地面和标线点云间强度差异。然后采用k均值聚类和连通分支聚类方法提取标线对象,并基于主方向和几何形状特征处理实线型交通标线与停止线、道路出入口标线粘连产生的欠分割、过分割问题。在此基础上,基于独立标线对象的空间分布特性与场景语义结构信息提取实线型标线。本文采用4份不同场景数据进行试验验证,试验结果中实线型标线提取的准确率为95.98%,召回率达到91.87%,综合评价指标F1-Measure值达95.55%。该方法有效改善了受扫描距离、路面磨损以及点密度分布不均等因素影响的强度信息,解决了实线型标线与停止线、道路出入口标线因空间连接而产生的欠分割、过分割问题,实现了复杂道路环境(多车道、斑马线和虚线型标线干扰)下实线型标线的精确提取。然而,本文方法对于少数小斑块地面磨损区域处理效果仍然有待提高,且仍然存在因点密度稀疏而导致的部分实线型标线误提取和漏提取问题。在后续的学习工作中将结合这些问题进一步研究,尝试增加入射角校正模型,并构建适应小斑块的强度改正模型,同时探讨标线缺失处理方法和适用稀疏标线点云的聚类方法,以提高实线型标线的提取精度。
| [1] | TAN Huachun, ZHOU Yang, ZHU Yong, et al. A novel curve lane detection based on improved river flow and RANSA[C]//Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014: 133-138. |
| [2] | KUMAR A M, SIMON P. Review of lane detection and tracking algorithms in advanced driver assistance system[J]. International Journal of Computer Science & Information Technology, 2015, 7(4): 65–78. |
| [3] | JAAKKOLA A, HYYPPÄ J, HYYPPÄ H, et al. Retrieval algorithms for road surface modelling using laser-based mobile mapping[J]. Sensors, 2008, 8(9): 5238–5249. DOI:10.3390/s8095238 |
| [4] | GUO J, TSAI M J, HAN J Y. Automatic reconstruction of road surface features by using terrestrial mobile lidar[J]. Automation in Construction, 2015, 58: 165–175. DOI:10.1016/j.autcon.2015.07.017 |
| [5] | GUAN Haiyan, LI J, YU Yongtao, et al. Using mobile laser scanning data for automated extraction of road markings[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 87: 93–107. DOI:10.1016/j.isprsjprs.2013.11.005 |
| [6] | GUAN Haiyan, LI J, YU Yongtao, et al. Using mobile LiDAR data for rapidly updating road markings[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2457–2466. DOI:10.1109/TITS.2015.2409192 |
| [7] | YU Yongtao, LI J, GUAN Haiyan, et al. Learning hierarchical features for automated extraction of road markings from 3D mobile LiDAR point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(2): 709–726. DOI:10.1109/JSTARS.2014.2347276 |
| [8] | SOILÁN M, RIVEIRO B, MARTÍNEZ-SÁNCHEZ J, et al. Segmentation and classification of road markings using MLS data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 123: 94–103. DOI:10.1016/j.isprsjprs.2016.11.011 |
| [9] | CHEN X, KOHLMEYER B, STROILA M, et al. Next generation map making: geo-referenced ground-level LIDAR point clouds for automatic retro-reflective road feature extraction[C]//Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Acm-Gis 2009. Washington: ACM, 2009: 488-491. |
| [10] | HERVIEU A, SOHEILIAN B, BRÉDIF M. Road marking extraction using a model & data-driven RJ-MCMC[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2015, Ⅱ-3/W4: 47–54. |
| [11] | TEO T A, YU Huilin. Empirical radiometric normalization of road points from terrestrial mobile lidar system[J]. Remote Sensing, 2015, 7(5): 6336–6357. DOI:10.3390/rs70506336 |
| [12] | JOERG P C, WEYERMANN J, MORSDORF F, et al. Computation of a distributed glacier surface albedo proxy using airborne laser scanning intensity data and in-situ spectro-radiometric measurements[J]. Remote Sensing of Environment, 2015, 160: 31–42. DOI:10.1016/j.rse.2014.12.017 |
| [13] |
方伟, 黄先锋, 张帆, 等.
依据点云强度校正的壁画纠正[J]. 测绘学报, 2015, 44(5): 541–547.
FANG Wei, HUANG Xianfeng, ZHANG Fan, et al. Mural image rectification based on correction of laser point cloud intensity[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(5): 541–547. DOI:10.11947/j.AGCS.2015.20140244 |
| [14] | FANG Wei, HUANG Xianfeng, ZHANG Fan, et al. Intensity correction of terrestrial laser scanning data by estimating laser transmission function[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(2): 942–951. DOI:10.1109/TGRS.2014.2330852 |
| [15] | CHENG Ming, ZHANG Haocheng, WANG Cheng, et al. Extraction and classification of road markings using mobile laser scanning point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(3): 1182–1196. DOI:10.1109/JSTARS.2016.2606507 |
| [16] | YAN Li, LIU Hua, TAN Junxiang, et al. Scan line based road marking extraction from mobile LiDAR point clouds[J]. Sensors, 2016, 16(6): 903. DOI:10.3390/s16060903 |
| [17] | YANG Bisheng, LIU Yuan, DONG Zhen, et al. 3D local feature BKD to extract road information from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 130: 329–343. DOI:10.1016/j.isprsjprs.2017.06.007 |
| [18] | YANG Bisheng, FANG Lina, LI J. Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 79: 80–93. DOI:10.1016/j.isprsjprs.2013.01.016 |
| [19] |
谭凯, 程效军.
激光强度值改正模型与点云分类精度[J]. 同济大学学报(自然科学版), 2014, 42(1): 131–135.
TAN Kai, CHENG Xiaojun. Correction methods of laser intensity and accuracy of point cloud classification[J]. Journal of Tongji University (Natural Science), 2014, 42(1): 131–135. |
| [20] | TAN Kai, CHENG Xiaojun, DING Xiaoli, et al. Intensity data correction for the distance effect in terrestrial laser scanners[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(1): 304–312. DOI:10.1109/JSTARS.2015.2497310 |
| [21] |
程效军, 郭王, 李泉, 等.
基于强度与颜色信息的地面LiDAR点云联合分类方法[J]. 中国激光, 2017, 44(10): 267–274.
CHENG Xiaojun, GUO Wang, LI Quan, et al. Joint classification method for terrestrial LiDAR point cloud based on intensity and color information[J]. Chinese Journal of Lasers, 2017, 44(10): 267–274. |
| [22] | HE Kaiming, SUN Jian, TANG Xiaoou. Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(12): 2341–2353. DOI:10.1109/TPAMI.2010.168 |
| [23] | WEISS B. Fast median and bilateral filtering[C]//Proceeding SIGGRAPH'06 ACM SIGGRAPH 2006 Papers. New York: ACM, 2006: 519-526. |
| [24] |
李冠林, 马占鸿, 黄冲, 等.
基于K_means硬聚类算法的葡萄病害彩色图像分割方法[J]. 农业工程学报, 2010, 26(S2): 32–37.
LI Guanlin, MA Zhanhong, HUANG Chong, et al. Segmentation of color images of grape diseases using K_means clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(S2): 32–37. |
| [25] | YU Yongtao, LI J, GUAN Haiyan, et al. Automated extraction of urban road facilities using mobile laser scanning data[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2167–2181. DOI:10.1109/TITS.2015.2399492 |
| [26] |
罗海峰, 方莉娜, 陈崇成, 等.
基于DBN的车载激光点云路侧多目标提取[J]. 测绘学报, 2018, 47(2): 234–246.
LUO Haifeng, FANG Lina, CHEN Chongcheng, et al. Roadside multiple objects extraction from mobile laser scanning point cloud based on DBN[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 234–246. DOI:10.11947/j.AGCS.2018.20170524 |
| [27] | YANG Bisheng, FANG Lina. Automated extraction of 3-D railway tracks from mobile laser scanning point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(12): 4750–4761. DOI:10.1109/JSTARS.2014.2312378 |