



2. 百度在线网络技术(北京)有限公司, 北京 100085;
3. 同济大学测绘与地理信息学院, 上海 200092;
4. 北京建筑大学测绘与城市空间信息学院, 北京 102616
2. Baidu Online Network Technology(Beijing) Co. Ltd., Beijing 100085, China;
3. College of Surveying and Geo-informatics, Tongji University, Shanghai 200092, China;
4. School of Geomatics and Urban Spatial Informatics, Beijing University of Civil Engineering and Architecture, Beijing 102616, China
智能高精地图(intelligent high-precision map)是汽车自动驾驶的关键基础设施,因此也被称之为自动驾驶地图[1-3]。根据美国汽车工程师学会(Society of Automotive Engineers, SAE)的自动驾驶等级划分[4],智能高精地图也有着相应不同的定义范围(表 1):①L3级以下对于高精地图没有刚需,L0、L1级通过传统地图实现基础的道路导航功能[5],L2级引入ADAS(高级驾驶辅助系统,advanced driving assistant system)数据支撑汽车主动安全;②L3级实时环境感知的主体由人类驾驶员变为自动驾驶系统,高精地图已成为必选项,且需要车辆实时位置与高精地图能匹配一致[6-8],L3级系统作用域为场景相对简单的限定环境(如高速公路、封闭园区等),地图精度要求相对较低,且复杂度高的动态目标(如行人等)数量相对较少,实时传感器数据足够支撑有效的动态目标识别,地图只需提供静态环境与动态交通(即实时路况)信息;③L4级自动驾驶能够完成限定条件下的全部任务,无须人工干预,安全性要求高、地图精度要求高,且需地图提供动态交通和事件信息(包括实时路况与高度动态信息)以辅助周边环境模型构建;④L5级能够在任意环境条件下完全自动驾驶[9],作用域的显著扩大需要海量众包源为地图提供数据支撑,且需要地图具备高度智能性,能结合分析数据实现对环境的高度自适应。
| 环境监控主体 | 分级 | 名称 | 定义 | 系统作用域 | 数据内容 | 地图精度 /m |
采集方式 | 地图形态 | 地图目的 |
| 人类 | L0 | 无自动化 | 完全人类驾驶 | 无 | 传统地图 | 10 | GPS轨迹+IMU | 静态地图 | 道路导航 |
| L1 | 驾驶辅助 | 单一功能辅助,如ACC(Adaptive Cruise Control) | 限定 | 传统地图 | 10 | ||||
| L2 | 部分自动化 | 组合功能辅助,如LKA(Lane Keeping Assist) | 限定 | 传统地图+ADAS数据 | 1~5 | 主动安全 | |||
| 系统 | L3 | 有条件自动化 | 特定环境实现自动驾驶,需驾驶员介入 | 限定 | 静态高精地图 | 0.2~0.5 | 高精度POS+图像提取 | 静态地图+动态交通信息 | 自动驾驶 |
| L4 | 高度自动化 | 特定环境实现自动驾驶,无须驾驶员介入 | 限定 | 动态高精地图 | 0.05~0.2 | 高精度POS+激光点云 | 静态地图+动态交通和事件信息 | ||
| L5 | 完全自动化 | 完全自动控制车辆 | 任意 | 智能高精地图 | 多源数据融合(专业采集+众包) | 静态地图+动态交通和事件信息+分析数据 |
测绘精度是智能高精地图的核心指标。目前虽无强制性标准规定,但普遍认为智能高精地图的绝对坐标精度应在5~20 cm之间[10-12],并包含道路静态与动态环境信息,能够以云端协同、车路协同等方式实现信息加载,辅助车辆感知、定位、规划与控制且具备自学习、自适应、自评估能力。
本文主要研究内容包括:①从地图学理论上提出智能高精地图信息传输模型;②从实际使用上结合轮式机器人自主智能控制流程,提出智能高精地图的数据逻辑结构并分析其各层数据在自动驾驶各环节中的作用;③从计算模式上总结“众包+边云协同计算”的智能高精地图计算模式,并针对众包采集的低质量数据如何满足高精地图制图要求这一问题,开展关键技术分析;④从应用场景上分析未来智能高精地图的有效应用场景;⑤提出本领域未来发展的思考与建议。
1 信息传输模型地图信息传输模型是开展地图研究的基础,用以表现信息传输过程的主体构成、传输指向及信息流。考虑到目前智能高精地图在信息传输模型方面尚缺乏理论支撑,有必要对其信息传输模型进行相关研究,为后续更进一步研究提供理论基础。下面通过结合传统的地图信息传输模型,提出一种智能高精地图信息传输模型,并分析其模型构成、特点及传输过程。
经典的柯拉斯尼地图信息传输模型可以用六元组TT=(P1,P2,U1,U2,C,M)表示,其中:①C表示客观世界,M表示地图;②P1与P2分别表示制图者集合与用图者集合;③U1为制图者对空间环境的认识;④U2为用图者对空间环境的认识。信息传输是从制图者到用图者的单向传递,基本过程为C→P1→U1→M→U2→P2:客观世界通过制图者的认识形成概念,使用地图语言变成地图,用图者通过对地图图形与符号的解析形成对客观世界的概念。该模型将客观世界、制图者、用图者与地图统一在一个相互联系的系统之中[13],在推动地图学发展与应用方面发挥了重大作用[14]。但由于其研究对象是传统地图,信息传输无法满足智能高精地图的实时和机器认知的需求,其本身仍存在着一定的局限性:①U1、U2表示制图者与用图者对空间环境的认识,是相对静态的地图空间认知,缺乏对实时环境的动态认知;②P1与P2被隔离开,P2不直接参与地图制作,只是被动的信息接收者,M并不一定能很好地满足用户需求;③P1→M→P2的信息传递过程中,制图者和用图者依靠自身空间认识与图形思维能力去制作与理解地图,其专业知识素养会对地图信息传输产生较大影响,信息传输效率不高。此后随着互联网地图、个性化地图等新兴地图的出现,柯拉斯尼模型也被不断进行补充与完善[15-17]。
本文认为智能高精地图信息传输模型可以用七元组表示(图 1):HT=(P1,P2,U′1, U′2,C,M,F)。相比于柯拉斯尼模型,主要区别在于:①传感器的大规模普及使用,使地图内容由地理环境扩展为与时空环境相关内容,制图者与用图者对环境的认识从地图空间认知U1、U2提升至动态感知认知U′1、U′2[18-19];②引入由U′2决定的用户认知特征及需求F(不同U′2决定F的独特性),将原来依赖于用户认知特征与思维能力的间接信息自适应转变为直接信息,降低认知负荷,提升认知效果与传输效率,实现地图与用户需求的自适应;③集合P1与P2部分重叠,表示用图者不再是被动接受信息,也参与地图制作,由单一的专业制图者转变为专业制图者与大众化众包认知相融合的形式,地图信息在P1、P2与M间双向传递,并以用户需求与特征为牵引。其信息传输主要包括6个阶段:

|
| 图 1 智能高精地图信息传输模型 Fig. 1 The information transmission model of intelligent high-precision map |
(1) 用户模型构建阶段:获取个性信息F,构建用户模型。
(2) 信息获取阶段:基于直接观测、间接观测、制图者主观因素、用户模型信息,形成制图者对环境的认识U′1。
(3) 信息加工阶段:基于制图者对环境的认识,智能化信息加工,通过互联网传输,形成智能高精地图M。
(4) 信息解译阶段:通过互联网接收地图,结合自身对环境的观测与个人特征,分析与解释地图,形成用户对环境的认识U′2。
(5) 交互反馈阶段:用户对地图个性化服务的评价,制图者对反馈的响应,两者间通过网络进行动态交互。
(6) 行为指导阶段:基于用户对环境的认识,为实际行动提供基础。
信息传输模型的研究对智能高精地图具有重要指导意义,有助于准确把握智能高精地图的本质及内容结构,为实际应用提供支撑。例如:信息传输模型的三大特点:动态化、个性化、众包化,可以辅助智能高精地图确定数据内容(动态信息、用户信息)及数据来源。
2 数据逻辑结构及应用分析智能高精地图由多层数据组合而成,其数据逻辑结构应能准确反映道路环境,实现地图数据的多尺度标定和高效存储,支持定位、路径规划、决策控制,并能满足导航中基于空间索引的需求[20]。许多研究者对智能高精地图进行了研究,但在数据逻辑结构与实际应用等方面缺乏统一认识。基于此,下面通过结合轮式机器人自主智能控制流程及相关地图数据逻辑结构,提出一种相对完整且准确的智能高精地图数据逻辑结构,并分析其各层数据在自动驾驶各环节中的作用。
2.1 智能高精地图数据逻辑结构有效且合理的数据逻辑结构是智能高精地图领域的研究重点:①在静态数据逻辑结构方面,文献[21]将高精地图分为4层:道路层、车道网络层、车道线层与交通标志层;文献[22]建立了用于车道路径导航的3层车道级地图体系结构,设计了道路层、中间层与车道级层;国际导航数据标准协会(Navigation Data Standard Association, NDS)提出用于改进导航定位与路径规划的Open Lane Model[23],存储高达1 cm分辨率的车道拓扑与高精度几何图形。②基于现实环境的动态性与复杂性,仅依靠静态地图数据不足以刻画真实的周边环境,为了保证出行安全,还需引入动态地图数据。BOSCH公司最早于2007年提出局部动态地图(local dynamic map, LDM)概念[24],引入动态数据,将地图分为4层:静态数据层、半静态数据层、半动态数据层、动态数据层,这种动态数据逻辑结构是当前高精地图设计的一个重要参考。③考虑到智能驾驶除了必需的安全性之外,还需提供更加人性化与智能化的舒适体验,相关机构还提出了智能数据逻辑结构。如HERE公司提出的高精度动态地图(HD live map),结合长期存在的道路内容、临时信息及分析数据,提供丰富的环境信息与实时道路信息,并通过分析长期基于位置的驾驶行为获取速度剖面数据,提供特定情况下的速度配置文件(http://360.here.com/2015/04/23/humanized-driving)。
总体来说,智能高精地图的数据应包含丰富且准确的场景语义信息、实时路况信息及驾驶经验信息用以辅助环境感知、车辆定位与规划控制,实现当前情况下最优驾驶策略,支撑自动驾驶汽车的未来出行。结合信息传输模型的特点及现有数据逻辑结构的数据类型特征,本文确定智能高精地图数据逻辑结构的内容构成应满足三大要求:一要高精,意味着地图需要非常准确与详细的数据,能真实反映出地图目标在现实世界中的准确位置;二要动态,意味着地图需要高度动态的道路信息以刻画真实的周边环境,保证现势性以有效应对各种突发情况;三要自适应,意味着地图需要能主动适应各种复杂环境的适时变化,结合驾驶经验数据集提供与当前情况最为匹配的驾驶与信息服务。
基于上述要求,综合分析前面所述数据逻辑结构的分层特点,及参考OpenDrive[25]等相关地图标准对内容组成与分类的定义。本文将智能高精地图数据逻辑结构划分为4层:静态地图层、实时数据层、动态数据层、用户模型层(其中局部代价地图为局部范围内的静态地图层、实时数据层与动态数据层的组合,用以表征真实的周边环境,主要分为静态层与障碍物层)。
2.1.1 静态地图层静态地图层是当前制图的重点。主要目的在于精准刻画静态驾驶环境,提供丰富的道路语义信息约束与控制车辆行为。主要包含道路网、车道网、交通设施与定位图层(表 2)。
| 数据类型 | 内容 | 属性 | 几何表达 | 服务功能 | 合作/竞争 |
| 道路网 | 道路拓扑、道路几何 | 道路方向、曲率、高程、道路类型、车道数量、匝道类型、功能等级等 | 道路基准线网络(线、点) | 全局规划 | 合作领域 |
| 车道网 | 车道拓扑、车道几何 | 车道线、车道高度、车道曲率半径、车道宽度、车道通行方向、车道限制等 | 车道级道路网络(线、点) | 感知、定位、局部规划、车辆控制 | |
| 交通设施 | 交通标示、路侧设施、固定地物 | 类型、高度、宽度、颜色、形状、形状使用规则、形状分类、ID等 | 平面表示(点、线、面)实体表示 | ||
| 定位图层 | 多类型定位数据(如反射率图) | 类型、面积、半径、颜色、反射率、地物高度等 | 平面表示、实体表示 | 定位 | 竞争领域 |
道路网主要由道路基准线网络构成,以描述道路几何、表达与交通设施间的关系,包括道路基准线、道路基准线连接点、路口等。车道网主要由车道级道路网络构成,记录车道网中每个独立车道相关属性,以描述车道几何、道路显示等,包括车道级道路、车道基准线、车道标线等(如图 2所示)[26]。交通设施根据不同种类,可区分为平面表示与实体表示两种表示形态,如图 3所示。上述3层组成静态地图层的基本数据结构,是关乎国家地理数据安全的基础地理信息数据,应由国家主导,相关企业、地方政府与智能高精地图管理中心之间相互协作,保证相关资料与数据的传输、处理与更新,保证国家地理数据安全。定位图层包含企业发布的不同数据类型的定位数据,以适应不同原始设备制造商(original equipment manufacturer,OEM)的传感器设置与定位方案,是基于基础地理信息数据的衍生性服务应用,由各方参与进行市场竞争。

|
| 图 2 智能高精地图道路网与车道网 Fig. 2 The road and lane network schematic diagram of intelligent high-precision map |

|
| 图 3 智能高精地图交通设施 Fig. 3 The traffic facilities schematic diagram of intelligent high-precision map |
2.1.2 实时数据层
实时数据层包含更新频率较高的实时路况信息,根据数据类型的差异可大致分为交通限制信息、交通流量信息及服务区信息(如表 3所示)。这些信息有许多来源:道路传感器网络、交通管理部门、道路管理部门、气象局、车载传感器等,最重要的是来自海量行驶车辆的传感器数据。当路况发生改变时车载传感器检测路况变化,并与路上其他车辆或道路传感器网络的输入数据在云端进行交叉检查与数据融合,实时更新路况信息。
| 数据类型 | 内容 | 属性 | 表现方法(示例) | 服务功能 |
| 交通限制信息 | 道路工程、交通管制、交通事件、天气条件等 | 路面状况、可见度、限制起点、限制终点、限制长度、影响范围、车道ID等 | 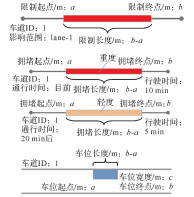 |
动态路径规划、车辆控制 |
| 交通流量信息 | 实时交通拥堵程度、预测交通拥堵程度等 | 通行时间、拥堵起点、拥堵终点、拥堵长度、路段行驶时间、拥堵程度(颜色)、车道ID等 | ||
| 服务区信息 | 停车空位、服务区负载程度等 | 车位宽度、车位起点、车位终点、车位长度、服务区拥堵程度(颜色)、车道ID等 |
2.1.3 动态数据层
动态数据层包含车辆、行人、交通信号灯等高度动态的信息,更新频率快。通常有两种不同类型的信息来源:①车载传感器如摄像头、雷达等直接采集获取的环境信息,即主动感知动态信息;②由智能交通系统(intelligent traffic system)或类似的外部系统提供的信息,即被动感知动态信息,主要是道路用户的V2X(vehicle to X)信息,包括GNSS数据、航向、速度等(如表 4所示)。车辆通过动态信息预测附近运动物体(包括潜在运动物体)的轨迹路径、获取实时交通信号,弥补在能见度低的交叉盲点上车载传感器的视野盲区,保证行驶安全。
| 数据类型 | 内容 | 属性 | 表现方法(示例) | 服务功能 |
| 主动感知动态信息 | 车辆传感器主动感知的附近车辆、行人、交通信号灯等 | 种类、方位、GNSS定位数据、距离、速度、航向等 |  |
动态路径规划、车辆控制 |
| 被动感知动态信息 | 从车辆传感器之外的各种来源获取的附近车辆、行人、交通信号灯等 | 种类、方位、GNSS定位数据、距离、速度、航向等 |
2.1.4 用户模型层
智能高精地图的基本出发点就是以用户为中心,监测、识别并自适应用户需求与场景变化,通过自我调整与自我组织提供与当前情况最为匹配的信息服务与驾驶服务。同时对自适应结果进行评估,通过对用户满意度评估标准的制定、满意度获取及结果反馈,使得整个系统不断优化,实现自学习、自适应、自评估的自主智能控制功能。为此需要增加用户模型层,记录、分析与应用用户个性化信息。由驾驶记录数据集与驾驶经验数据集两个方面的内容构成(如表 5所示):驾驶记录数据集是特定条件下用户对数据、界面、控制、感知、预测的所有操作记录;驾驶经验数据集则是对海量记录数据进行多维时空大数据挖掘、分析与处理后为用户提供的经验信息,用以辅助车辆实现特定约束条件下的最优行驶策略。
| 数据类型 | 内容 | 示意图 | 服务功能 |
| 驾驶记录数据集 | 车辆配置(传感器配置、处理芯片、通信设备、车辆性能等)场景信息(自然环境、应用场合、出行任务、道路状况等)认知特征(人物年龄、文化背景、专业背景、个性化需求等)驾驶行为(横向与纵向控制、跟随距离等) | 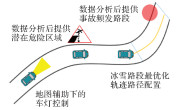 |
个性化路径规划 |
| 驾驶经验数据集 | 危险区域、特定路况的速度配置、用户需求等 |
2.2 数据逻辑结构在自动驾驶汽车自主导航中的应用
结合轮式机器人运行控制流程(流程基于经典的概率机器人[27]运行控制流程),从实际应用的角度详细阐述高精地图数据逻辑结构在自动驾驶中的应用(如图 4所示)。

|
| 图 4 智能高精地图数据逻辑结构及应用 Fig. 4 The data logic structure and application of intelligent high-precision map |
控制流程通常分为“感知-规划决策-控制”3个步骤:
(1) 在感知层面,引入局部代价地图的静态层数据。实际应用中,机载传感器实时感知周边环境及自身粗略位置,通过定位器接收感知数据及静态层数据,经数据融合生成高质量的感知结果,实现车辆对周边环境的精确感知认知。通过将检测到的具备语义意义的特征与静态层数据进行地图匹配,实现相对定位;经过坐标转换,实现绝对定位。
(2) 在规划决策层面,引入局部代价地图、静态地图层的道路网、用户模型层的驾驶经验数据集以及全局范围的实时地图数据。实际应用中,目前自动驾驶主要采用层次化路径规划方式,各规划层分别引入不同地图数据约束与引导车辆轨迹路径:①全局规划:首先基于绝对定位与道路网,确定起终点间的全局规划路径;②语义规划:引入实时地图数据与驾驶经验数据集,充分考虑道路语义(如拥挤程度)和用户语义(如必须途经点),基于全局规划路径进行全局二次规划,得到语义规划路径;③局部一次规划:基于相对定位与局部代价地图,在语义规划路径的基础上生成局部范围内无碰撞可执行的轨迹路径,实现局部一次规划;④局部二次规划:引入驾驶经验数据集,根据当前实际情况优化局部一次规划路径,生成满足用户需求的平滑轨迹,提高自动驾驶安全性与舒适性,实现局部二次规划。
(3) 在控制层面,控制器将局部二次规划生成的轨迹路径转换为机器人的控制指令,控制机器人运动,并向定位器进行信息反馈以修正误差。地图虽与控制器之间无直接连接,但在实际应用中,通过实时环境感知与地图匹配,获取交通标志、障碍物等相对于动态车辆的精确位置,能对特定情况下的自动驾驶车辆实行基于行驶规范(如交通规则、地图数据约束)与驾驶经验(如不同场景下的速度配置)的驾驶行为控制,这是传统导航地图不具备的功能。
3 计算模式与更新技术 3.1 “众包+边云协同计算”计算模式维护更新是地图计算层面的重要问题。针对智能高精地图复杂多样的数据类型与庞大的数据体量,如何实现实时的数据更新与有效的数据处理之间的平衡是一个巨大的挑战。终端有限的计算能力难以独自应对实时产生的大量数据处理要求,传统以云计算模型为核心的集中式大数据处理方法也会因为云端负担过重而无法实现实时的数据处理。为了解决这些问题,需要建立新的计算模型。
边缘计算是一种在网络边缘执行计算的计算模型[28],其边缘是指从数据源到云计算中心路径之间的任意计算和网络资源[29-30]。边缘计算能通过将中心云的部分计算任务转移至边缘侧来减轻中心云计算负担,提供当前云计算技术无法保证的低时延、高可靠、高带宽。结合边缘计算基本理念与云计算技术,出现了一种构筑在边缘基础设施之上的弹性云计算平台,即边缘云。作为中心云的延伸,边缘云具备网络边缘侧的计算、网络、存储等能力,并与中心云和终端形成“云边端三体协同”的端到端技术架构[31]。
同时,智能高精地图为了保持周期性数据更新,需要大范围内足量且实时的有效道路数据作为支撑。仅依靠专业测绘难以实现对道路的全时空实时覆盖。基于用户众包是确保智能高精地图实时性的必要来源,也是业内公认的高精地图未来形态。众包作为群智感知的一种分布式任务分配与执行机制,能把过去需要分配给特定个人完成的任务以自由自愿的形式外包给非特定的大众完成,充分利用群体智能以较低的成本完成计算机难以完成的任务[32]。
综上,为了保证数据处理与交互的实时性,本文提出“众包+边云协同计算”的智能高精地图计算模式(如图 5所示)。以“终端-边缘云-中心云”3层架构作为技术支撑,融合集中式在处理能力与分布式在信息效用方面的优势;以众包化的任务分发机制作为策略支撑,充分利用群体智能以较低的成本有效完成复杂任务,实现地图实时更新的低成本和可量产化。实际运用中:①中心云端建立智能高精地图数据服务中心,侧重于非实时、长周期数据、集中式决策的全局性业务需求,如大数据分析与挖掘、AI机器学习、数据存储等,实现地图生成与增量更新、驾驶行为分析、全局性众包任务分发等功能;②边缘云端建立区域性地图数据服务节点,侧重于实时性、短周期数据、多源异构处理等要求较高的区域性业务需求,如区域数据的实时处理与可视化等,实现路况监控、事故预警等功能,同时,边缘云之间互联,根据应用区域、优先等级及处理性能等实现高效的任务调度并通过互联网与中心云互联,实现数据协同、任务协同、管理协同、安全协同;③终端(包括车载单元、移动设备、路侧设施等基本数据采集与处理节点)进行初步的数据采集、对齐和处理,如感知特征识别、地图要素矢量化等,在顶层调度下协作完成感知任务,以众包的方式提高信息与服务的实时性。

|
| 图 5 智能高精地图"众包+边云协同计算"计算模式 Fig. 5 The computing mode schematic diagram of "Crowdsourcing+Edge-Cloud Collaborative Computing" of intelligent high-precision map |
3.2 “众包+人工智能”更新技术
通过众包方式实现智能高精地图数据的实时更新,满足功能测试与车辆自动驾驶要求等,理想状态是各方采用统一的行业标准,通过互换与共享数据实现道路信息的全时空覆盖,基于基础高精地图网以众包方式进行数据采集与更新。然而目前众包更新技术存在的一些问题,制约着地理信息的快速便捷使用。如何提高众包数据质量以满足智能高精地图的制图要求,是其中的关键问题。
针对众包数据目前存在的终端层数据冗余或缺失、云端层数据混杂等质量缺陷,人工智能技术是一个有效的解决方案。“众包+人工智能+摄像头”的众包更新技术路线已成为目前各大参与企业的主流方案,并取得显著进展。下面结合实际应用,详细阐述人工智能技术对众包数据的影响(见图 6):

(1) 在终端层:一方面终端层数据体量大,全部传至云端容易造成数据冗余,可能导致有效数据被掩盖;另一方面,由于天气、光照、拍摄距离、角度的不同、物体自身发生形变或磨损以及被其他物体所遮挡而导致物体感知特征的多样性与模糊性,终端有限的性能容易造成有效数据缺失。因此需要在终端层进行数据一次加工,包括感知特征的有效提取与地图要素矢量化,以提高众包数据质量,降低众包数据体量。实际应用中,深度学习(deep learning)技术[33]以其高准确性、高稳健性、低成本[34]的优点已成为目前众包数据处理领域新的研究热点。作为人工智能技术的代表,深度学习技术能依靠GPU(graphics processing unit)强大的并行处理能力自动地从大量人工标注训练数据集中学习特征[35],训练好的神经网络模型能够对图像数据等进行实时高效的自动化处理[36],将非结构化的原始数据转化为结构化数据,包括目标位置、姿态、种类、语义信息等。基于深度学习方法构建的各类卷积神经网络、深度神经网络、递归神经网络、生成对抗神经网络、长短期记忆网络等极大提高了众包数据中目标检测、跟踪及分割等视觉任务的效率与精度[37-47],为解决场景理解、图像描述、事件检测和活动识别等更复杂更高层次的视觉任务提供支撑[48]。同时,对感知特征高效且精准的提取,也为地图要素矢量化提供数据支撑。
(2) 在云端层:云端层汇集海量众包数据,传感器性能差异、数据格式差异等导致众包数据质量参差、类型混杂。需要有效的分析与学习方法进行数据二次加工,包括特征提取、质量优化、数据融合及场景推理等,实现无效信息过滤与有效信息提取,提高众包数据精度与可信度。实际应用中,主要利用人工智能以及大数据处理等技术,从海量众包数据中获取有效信息。如:①特征提取方面,广泛使用的基于深度学习的目标检测、分割等机器视觉技术,基于云端强大的计算能力足够实现高质量的特征提取;②质量优化方面,图像超分辨率(super-resolution)技术增强图像与视频分辨率[49-51],使低质量的众包影像数据得到显著改善;③数据融合方面,基于众源轨迹数据空间分布特征,融合海量车载轨迹数据来实现车道级道路路段几何与属性信息的自动识别[52-53];④场景推理方面,语义修补(semantic inpainting)技术根据场景语义推断图像缺失区域[54-56],经图像数据修补能提高源数据质量。
4 智能高精地图与车路协同一体化智能高精地图作为交通资源全时空实时感知的载体,要求区域大规模联网与信息交互以实现对静态、动态信息的有效集成与更新。目前应用场景中,通常仅依靠当前车辆车载传感器对于周边环境的主动感知作为主要地图数据来源,这显然是不够的:①数据模型方面,从传感器之外的各种来源(即被动感知)获取信息,对于提高数据模型质量至关重要,尤其对于动态及实时数据层。动态数据层仅包含自身车载传感器直接采集获取的动态环境信息(即主动感知动态信息),无法实现对视野盲区的覆盖,且基于传感器的固有局限也无法实现视野范围内的绝对精确感知(如对交通灯信号的识别,即使使用人工智能技术也无法保证100%的检测精度);实时数据层的路况信息主要来源于交通管理部门、道路管理部门等相关机构,缺少路上其他车辆的路况感知数据,时效性较低,难以实时更新路况信息。②计算模式方面,“云边端”三层技术架构要求区域大规模联网联控,众包的实施策略要求足够数量的基本感知单元相互协作,实现计算任务的有效调度与计算结果的实时交互。
随着5G、V2X(Vehicle to X)等现代通信与网络技术的发展,未来智能高精地图的应用场景将会是协同感知与协同精密定位技术支撑下的车路协同一体化(如图 7所示)。车辆、道路、行人等交通参与者将成为智能交通系统中的信息节点,并通过信息通信技术实现区域联网与信息交互。将基于传感器的主动感知与基于V2X技术的被动感知数据相融合,突破自主式系统对于实时周边环境的感知局限,实现道路全范围全天候全时段的协同感知,提高智能高精地图质量,有效支撑车辆感知与自定位:

|
| 图 7 智能高精地图车路协同一体化应用场景 Fig. 7 The application scenario of vehicle-infrastructure integration of intelligent high-precision map |
(1) 在感知层面,通过协同感知弥补感知盲区与提升感知可靠性。协同感知能从时间维度上预知附近车辆运动、交通拥堵状况、交通事故、红绿灯变换、天气预报等驾驶环境未来状态信息;从空间维度上突破单车视野限制,弥补视角盲区,感知弯道盲区、车辆遮挡盲区等可视范围外的潜在物体,辅助刻画真实的周边驾驶环境[57]。实现智能高精地图与环境感知系统实时数据交互,辅助感知系统信息获取与数据置信度验证,并按需求与规则筛选数据后实现地图的动态更新与动态建库,保证环境感知的准确性。
(2) 在自定位层面,基于精准感知实现协同精密定位。目前主流的自定位技术均存在一定局限,卫星信号易受天气条件与城市环境的干扰,差分技术能有效提高精度但是成本昂贵;航迹推算容易累积误差导致较大偏移;摄像头与激光雷达易受天气条件影响[58]。依靠单一的传感器和算法很难满足实际应用的定位需求,多传感器与算法融合的方案是一种有效的解决办法[59],然而这种多传感器融合定位技术依赖于对实时周边环境的精准感知。协同感知技术能有效保证环境感知的准确性,通过将感知结果与智能高精地图相匹配,实现协同精密定位。
5 思考与建议根据中国《智能汽车创新发展战略》,到2020年,标准智能汽车的路网设施、法规标准等框架基本形成;到2025年标准智能汽车路网设施、法规标准等全面形成,“人-车-路-云”实现高度协同。欧盟从互联网道路环境资源聚合与智能网联汽车两方面来发展智能交通,计划在2050年前完成目标重合。日本于2015年开展自动驾驶的静态数据调研,2016年开展动态数据调研,成立动态地图公司,对动态地图数据用例、要素内容等展开讨论,计划在2020年实现高精地图日本全覆盖。综上,预测我国未来智能高精地图发展的阶段与任务,如图 8所示。

|
| 图 8 智能高精地图发展路线图 Fig. 8 The development roadmap of intelligent high-precision map |
智能高精地图作为实现汽车自动驾驶的关键基础设施,是交通资源全时空实时感知的载体和交通工具全过程运行管控的依据。从我国相关产业发展来看,仍然存在一些对智能高精地图发展的制约:
(1) 地图必要性方面:部分学者认为,智能高精地图在自动驾驶中也不是必需的。人类驾驶员通过自身的“传感器”(眼睛、耳朵)与“智能”(人脑)协作完成驾驶任务,这类似于现在自动驾驶“传感器+AI”的技术路线,自动驾驶汽车完全可以在无图或普通地图环境下按照机器逻辑与感知数据行驶。然而,一方面,即使使用人工智能技术与传感器相结合以提高环境感知能力,仍旧难以完全弥补车载传感器的固有局限(包括性能限制、覆盖范围限制等);传统导航电子地图与传统机器人导航地图(障碍物地图、特征地图、对象地图、语义地图[60-63])承载的信息量也不足以实现当前情况下最优驾驶策略,难以满足自动驾驶汽车作为商业可行性产品的安全性与舒适性需求。另一方面,智能高精地图的车道标志线、拐弯交通标志牌等的位置三维坐标和相关参数(如弯道半径、坡度等)具有驾驶行为控制功能,是在视觉或雷达等车载环境感知系统失效时最后的驾驶控制依据,为车辆安全行驶提供重要的冗余保障,这种地图的控制功能是传感器与传统地图所不具备的。可能未来到了机器超过人类所具有的实时感知、推理、决策与控制能力的时候,人工智能技术充分安全且舒适的指引车辆行驶,可能就不需要智能高精地图。但在目前人机共驾环境下,通过智能高精地图实现自动驾驶汽车的导航与研发,是很有必要的。
(2) 法律法规方面:我国现有法律法规与智能高精地图的实际需求存在一定的冲突,主要体现在3个方面:基本地理信息采集资质、地图偏转加密、地图部分地理信息表达受限。为了减少法律法规对产业发展的影响,建议完善与更新现有制度法规,制定符合各产业需求的全新管理模式与法律规程,从国家政策上支持智能高精地图的发展,提升我国在该领域的核心竞争力。
(3) 地图标准方面:地图标准作为地图生产的指导性规范,其制定可分为基于技术推动的与基于需求推动的两类,由于安全性需求几乎超高苛刻,因此很多标准需要和法规同步制定。目前相关地图标准在国际上以欧洲为主导,如欧洲电信标准化协会(European Telecommunications Standards Institute)和传感器接口规范创新平台(sensoris)的一些标准。相比之下,国内地理信息标准化工作委员会、中国智能交通产业联盟等也开始着手相关标准制定工作,但进度相对滞后且还需要进一步协同立场,亟待整合测绘、汽车、交通全行业资源制定具有我国特色的行业统一标准,包括智能高精地图生产技术标准规范(数据采集工序、数据处理指标及要求等)、智能高精地图数据规范(统一的静态/动态数据标准、数据交换格式等)、保证国家地理数据安全的数据发布与控制标准等。
综上,智能高精地图也将是未来出行即服务(mobility as a service, MaaS)的关键组成部分。出行即服务的出现旨在深刻理解公众出行需求,以人为中心,从交通基础设施、运载工具及运行系统等方面综合推进交通运输资源在线集成和共享,充分利用大数据决策实现最优资源调配,使出行便捷安全[64-66]。而智能高精地图可实现城市交通资源的最优化配置,充分发挥不同交通资源之间的联动效果,从源头上解决城市之间交通资源的供需矛盾,实现高效高质量出行,实现“出行即服务”愿景。
| [1] | MATTHAEI R, BAGSCHIK G, MAURER M. Map-relative localization in lane-level maps for ADAS and autonomous driving[C]//2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn, Michigan: IEEE, 2014: 49-55. |
| [2] | SHIM I, CHOI J, SHIN S, et al. An autonomous driving system for unknown environments using a unified map[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 1999–2013. DOI:10.1109/TITS.2015.2389237 |
| [3] | JO K, SUNWOO M. Generation of a precise roadway map for autonomous cars[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(3): 925–937. DOI:10.1109/TITS.2013.2291395 |
| [4] | SAE International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[S]. SAE International, 2016. |
| [5] |
刘少山, 唐洁, 吴双, 等.
第一本无人驾驶技术书[M]. 北京: 电子工业出版社, 2017: 180-191.
LIU Shaoshan, TANG Jie, WU Shuang, et al. The first book on driverless technology[M]. Beijing: Publishing House of Electronics Industry, 2017: 180-191. |
| [6] | GUO Chi, GUO Wenfei, CAO Guangyi, et al. A lane-level LBS system for vehicle network with high-precision BDS/GPS positioning[J]. Computational Intelligence and Neuroscience, 2015, 2015: Article ID 531321. https://www.ncbi.nlm.nih.gov/pubmed/25755665 |
| [7] | LEVINSON J, MONTEMERLO M, THRUN S. Map-based precision vehicle localization in urban environments[C]//Proceedings of Robotics: Science and Systems Ⅲ. Atlanta, GA: Georgia Institute of Technology, 2007. |
| [8] | BAUER S, ALKHORSHID Y, WANIELIK G. Using high-definition maps for precise urban vehicle localization[C]//Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016: 492-497. |
| [9] | SEIF H G, HU Xiaolong. Autonomous driving in the iCity-HD maps as a key challenge of the automotive industry[J]. Engineering, 2016, 2(2): 159–162. DOI:10.1016/J.ENG.2016.02.010 |
| [10] | LEVINSON J, THRUN S. Robust vehicle localization in urban environments using probabilistic maps[C]//Proceedings of the 2010 IEEE International Conference on Robotics and Automation. Anchorage, Alaska: IEEE, 2010: 4372-4378. |
| [11] | SCHREIBER M, KNÖPPEL C, FRANKE U. LaneLoc: lane marking based localization using highly accurate maps[C]//2013 IEEE Intelligent Vehicles Symposium (Ⅳ). Gold Coast City, Australia: IEEE, 2013: 449-454. |
| [12] | FAIRFIELD N, URMSON C. Traffic light mapping and detection[C]//Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 5421-5426. |
| [13] |
陈棉, 刘晓枚, 沈春迎.
多媒体电子地图的信息传递[J]. 测绘科学, 2003, 28(3): 23–26.
CHEN Mian, LIU Xiaomei, SHEN Chunying. Multimedia electronic map (atlas) information transfer[J]. Science of Surveying and Mapping, 2003, 28(3): 23–26. DOI:10.3771/j.issn.1009-2307.2003.03.007 |
| [14] |
王家耀.
时空大数据时代的地图学[J]. 测绘学报, 2017, 46(10): 1226–1237.
WANG Jiayao. Cartography in the age of spatio-temporal big data[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1226–1237. DOI:10.11947/j.AGCS.2017.20170308 |
| [15] |
刘芳, 游雄, 於建峰, 等.
网络地图的信息传输模型研究[J]. 测绘通报, 2009(10): 15–17.
LIU Fang, YOU Xiong, YU Jianfeng, et al. A study of information transmission model of web map[J]. Bulletin of Surveying and Mapping, 2009(10): 15–17. |
| [16] |
马京振, 孙群, 肖强, 等.
基于自发地理信息的空间信息传输研究[J]. 地理空间信息, 2016, 14(7): 9–11, 19.
MA Jingzhen, SUN Qun, XIAO Qiang, et al. Research on spatial information transmission based on volunteered geographical information[J]. Geospatial Information, 2016, 14(7): 9–11, 19. DOI:10.3969/j.issn.1672-4623.2016.07.003 |
| [17] |
杨振凯.
个性化地图的信息传输模型初探[J]. 地理空间信息, 2018, 16(9): 55–57.
YANG Zhenkai. Research on information transmission model of personalized map[J]. Geospatial Information, 2018, 16(9): 55–57. DOI:10.3969/j.issn.1672-4623.2018.09.016 |
| [18] |
王家耀, 武芳, 郭建忠, 等.
时空大数据面临的挑战与机遇[J]. 测绘科学, 2017, 42(7): 1–7.
WANG Jiayao, WU Fang, GUO Jianzhong, et al. Challenges and opportunities of spatio-temporal big data[J]. Science of Surveying and Mapping, 2017, 42(7): 1–7. |
| [19] |
王家耀.
地图制图学与地理信息工程学科发展趋势[J]. 测绘学报, 2010, 39(2): 115–119, 128.
WANG Jiayao. Development trends of cartography and geographic information engineering[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(2): 115–119, 128. |
| [20] |
《中国公路学报》编辑部.
中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30(6): 1–197.
Editorial Department of China Journal of Highway and Transport. Review on China's automotive engineering research progress:2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1–197. DOI:10.3969/j.issn.1001-7372.2017.06.001 |
| [21] |
贺勇, 路昊, 王春香, 等.
基于多传感器的车道级高精细地图制作方法[J]. 长安大学学报(自然科学版), 2015, 35(S1): 274–278.
HE Yong, LU Hao, WANG Chunxiang, et al. Generation of precise lane-level maps based on multi-sensors[J]. Journal of Chang'an University (Natural Science Edition), 2015, 35(S1): 274–278. |
| [22] | LIU Chaoran, JIANG Kun, YANG Diange, et al. Design of a multi-layer lane-level map for vehicle route planning[C]//MATEC Web of Conferences. France: EDP Sciences, 2017. |
| [23] | Navigation Data Standard. Publishing high-accuracy map standard for companies: industrial consortium pushes autonomous driving[EB/OL]. (2016-09-14). https://www.nds-association.org/wp-content/uploads/20160914-PR-E.pdf. |
| [24] | SHIMADA H, YAMAGUCHI A, TAKADA H, et al. Implementation and evaluation of local dynamic map in safety driving systems[J]. Journal of Transportation Technologies, 2015, 5(2): 102–112. DOI:10.4236/jtts.2015.52010 |
| [25] | DUPUIS M, STROBL M, GREZLIKOWSKI H. OpenDRIVE 2010 and beyond-status and future of the de facto standard for the description of road networks[C]//Proceedings of the Driving Simulation Conference DSC Europe. Paris, 2010: 231-242. |
| [26] |
刘经南, 吴杭彬, 郭迟, 等.
高精度道路导航地图的进展与思考[J]. 中国工程科学, 2018, 20(2): 99–105.
LIU Jingnan, WU Hangbin, GUO Chi, et al. Progress and consideration of high precision road navigation map[J]. Engineering Science, 2018, 20(2): 99–105. |
| [27] | THRUN S, BURGARD W, FOX D. Probabilistic robotics[M]. Cambridge, Massachusetts: MIT Press, 2005. |
| [28] |
边缘计算产业联盟.边缘计算参考架构2.0[EB/OL]. (2018-04-05). http://www.ecconsortium.net/Lists/index/cid/11.html. Edge Computing Consortium. Edge computing reference architecture 2.0[EB/OL]. (2018-04-05). http://www.ecconsortium.net/Lists/index/cid/11.html. |
| [29] | SATYANARAYANAN M. The emergence of edge computing[J]. Computer, 2017, 50(1): 30–39. DOI:10.1109/MC.2017.9 |
| [30] | SHI Weisong, CAO Jie, ZHANG Quan, et al. Edge computing:vision and challenges[J]. IEEE Internet of Things Journal, 2016, 3(5): 637–646. DOI:10.1109/JIOT.2016.2579198 |
| [31] |
阿里云计算有限公司, 中国电子技术标准化研究院, 等.边缘云计算技术及标准化白皮书(2018)[EB/OL]. (2018-12-14). http://www.cesi.cn/images/editor/20181214/20181214115429307.pdf. Alibaba Cloud Computing Co. Ltd., China Electronics Standardization Institute, et al. White paper on edge cloud computing technology and standardization(2018)[EB/OL]. (2018-12-14). http://www.cesi.cn/images/editor/20181214/20181214115429307.pdf. |
| [32] |
冯剑红, 李国良, 冯建华.
众包技术研究综述[J]. 计算机学报, 2015, 38(9): 1713–1726.
FENG Jianhong, LI Guoliang, FENG Jianhua. A survey on crowdsourcing[J]. Chinese Journal of Computers, 2015, 38(9): 1713–1726. |
| [33] | HINTON G E, SALAKHUTDINOV R R. Reducing the dimensionality of data with neural networks[J]. Science, 2006, 313(5786): 504–507. DOI:10.1126/science.1127647 |
| [34] |
张新钰, 高洪波, 赵建辉, 等.
基于深度学习的自动驾驶技术综述[J]. 清华大学学报(自然科学版), 2018, 58(4): 438–444.
ZHANG Xinyu, GAO Hongbo, ZHAO Jianhui, et al. Overview of deep learning intelligent driving methods[J]. Journal of Tsinghua University (Science and Technology), 2018, 58(4): 438–444. |
| [35] |
王科俊, 赵彦东, 邢向磊.
深度学习在无人驾驶汽车领域应用的研究进展[J]. 智能系统学报, 2018, 13(1): 55–69.
WANG Kejun, ZHAO Yandong, XING Xianglei. Deep learning in driverless vehicles[J]. CAAI Transactions on Intelligent Systems, 2018, 13(1): 55–69. |
| [36] | WONG N, CHAMBERS C, STOL K, et al. Autonomous vehicle following using a robotic driver[C]//Proceedings of the 15th International Conference on Mechatronics and Machine Vision in Practice. Auckland, New Zealand: IEEE, 2008: 115-120. |
| [37] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV: IEEE, 2016: 779-788. |
| [38] | WANG Xiaolong, GUPTA A. Generative image modeling using style and structure adversarial networks[C]//Proceedings of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016: 318-335. |
| [39] | LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//Proceedings of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016: 21-37. |
| [40] | HE Kaiming, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision. Venice, Italy: IEEE, 2017: 2980-2988. |
| [41] | ZHAO Hengshuang, SHI Jianping, QI Xiaojuan, et al. Pyramid scene parsing network[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, Hawaii: IEEE, 2017: 6230-6239. |
| [42] | ZHANG Shifeng, WEN Longyin, BIAN Xiao, et al. Single-shot refinement neural network for object detection[C]//Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018: 4203-4212. |
| [43] | GOODFELLOW I J, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial networks[Z]. eprint arXiv: 1406.2661, 2014. |
| [44] | ARJOVSKY M, CHINTALA S, BOTTOU L. Wasserstein generative adversarial networks[C]//Proceedings of the 34th International Conference on Machine Learning. Sydney, Australia: IMLS, 2017: 214-223. |
| [45] | CRESWELL A, WHITE T, DUMOULIN V, et al. Generative adversarial networks:an overview[J]. IEEE Signal Processing Magazine, 2018, 35(1): 53–65. DOI:10.1109/MSP.2017.2765202 |
| [46] | FISCHER T, KRAUSS C. Deep learning with long short-term memory networks for financial market predictions[J]. European Journal of Operational Research, 2018, 270(2): 654–669. DOI:10.1016/j.ejor.2017.11.054 |
| [47] | SHARMA S, KIROS R, SALAKHUTDINOV R. Action recognition using visual attention[Z]. arXiv: 1511.04119, 2015. |
| [48] | ZHAO Zhongqiu, ZHENG Peng, XU Shoutao, et al. Object detection with deep learning: a review[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019. DOI: 10.1109/TNNLS.2018.2876865. |
| [49] | DONG Chao, LOY C C, HE Kaiming, et al. Image super-resolution using deep convolutional networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(2): 295–307. DOI:10.1109/TPAMI.2015.2439281 |
| [50] | DONG Chao, LOY C C, HE Kaiming, et al. Learning a deep convolutional network for image super-resolution[C]//Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland: Springer, 2014: 184-199. |
| [51] | LEDIG C, THEIS L, HUSZÁR F, et al. Photo-realistic single image super-resolution using a generative adversarial network[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, Hawaii: IEEE, 2017: 105-114. |
| [52] | YANG Xue, TANG Luliang, NIU Le, et al. Generating lane-based intersection maps from crowdsourcing big trace data[J]. Transportation Research Part C:Emerging Technologies, 2018(89): 168–187. |
| [53] | YANG Xue, TANG Luliang, STEWART K, et al. Automatic change detection in lane-level road networks using GPS trajectories[J]. International Journal of Geographical Information Science, 2018, 32(3): 601–621. DOI:10.1080/13658816.2017.1402913 |
| [54] | PATHAK D, KRÄHENBVHL P, DONAHUE J, et al. Context encoders: feature learning by inpainting[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 2536-2544. |
| [55] | YANG Chao, LU Xin, LIN Zhe, et al. High-resolution image inpainting using multi-scale neural patch synthesis[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, Hawaii: IEEE, 2017: 4076-4084. |
| [56] | YEH R A, CHEN Chen, YIAN LIM T, et al. Semantic image inpainting with deep generative models[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, Hawaii: IEEE, 2017: 6882-6890. |
| [57] |
李克强, 戴一凡, 李升波, 等.
智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1–14.
LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1–14. DOI:10.3969/j.issn.1674-8484.2017.01.001 |
| [58] | ZANG Andi, LI Zichen, DORIA D, et al. Accurate vehicle self-localization in high definition map dataset[C]//Proceedings of the 1st ACM SIGSPATIAL Workshop on High-Precision Maps and Intelligent Applications for Autonomous Vehicles. Redondo Beach, California: ACM, 2017: Article No. 2. |
| [59] | WAN Guowei, YANG Xiaolong, CAI Renlan, et al. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes[C]//Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, Australia: IEEE, 2018: 4670-4677. |
| [60] | THRUN S. Learning occupancy grid maps with forward sensor models[J]. Autonomous Robots, 2003, 15(2): 111–127. |
| [61] | OHYA A, NAGASHIMA Y, YUTA S I. Exploring unknown environment and map construction using ultrasonic sensing of normal direction of walls[C]//Proceedings of the 1994 IEEE International Conference on Robotics and Automation. San Diego, CA: IEEE, 1994: 485-492. |
| [62] | TOMONO M. 3-D object map building using dense object models with sift-based recognition features[C]//Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1885-1890. |
| [63] | KOSTAVELIS I, GASTERATOS A. Semantic mapping for mobile robotics tasks:a survey[J]. Robotics and Autonomous Systems, 2015(66): 86–103. |
| [64] | HIETANEN S. Mobility as a service[J]. The New Transport Model, 2014: 2–4. |
| [65] | JITTRAPIROM P, CAIATI V, FENERI A M, et al. Mobility as a service:a critical review of definitions, assessments of schemes, and key challenges[J]. Urban Planning, 2017, 2(2): 13–25. DOI:10.17645/up.v2i2.931 |
| [66] | GOODALL W, DOVEY T D, BORNSTEIN J, et al. The rise of mobility as a service[J]. Deloitte Review, 2017(20): 112–129. |