



2. 中国测绘科学研究院, 北京 100039;
3. 中测新图(北京)遥感技术有限责任公司, 北京 100039;
4. 国家测绘地理信息局卫星测绘应用中心, 北京 101300;
5. 武汉大学遥感信息工程学院, 湖北 武汉 430079;
6. 中国地质大学(武汉)信息工程学院, 湖北 武汉 430074;
7. 中国科学院长春光学精密机械与物理研究所, 吉林 长春 130033
2. Chinese Academy of Surveying and Mapping, Beijing 100039, China;
3. China TOPRS Technology Co. Ltd., Beijing 100039, China;
4. Satellite Surveying and Mapping Application Center, NASG, Beijing 101300, China;
5. School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China;
6. Faculty of Information Engineering, China University of Geosciences, Wuhan 430074, China;
7. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China
精度是高分辨率遥感和摄影测量的关键要素。影响精度的因素分为:成像系统误差和数据处理误差。系统误差是由某种物理的、机械的、技术的、仪器的或作业员原因造成的[1]。航天成像系统构建时依据精密光学与精密机械原则,辅以热控方法,系统精度可达±0.1 mm,角度可达±10″[2]。卫星运行环境单一、轨道稳定,即使对于三线阵这类多角度传感器,一旦装调完成,线阵间几乎不存在相对变化。值得注意的是,卫星平台颤振是影响高分卫星对地观测和测图能力的关键问题之一,对此文献[3]提出综合多传感器数据处理的卫星颤振探测补偿技术方法,实现高分卫星的颤振处理与分析。
比较而言,航空摄影系统常采用外拼接的多刚体(多镜头)结构,设计工艺简单,应用广泛[4-6]。但在大型作业前,常需要精密地面检校场进行外场校正,并运用地面控制点开展空中三角测量处理。而业务飞行作业时,由于航空摄影平台没有温控装置且运行环境复杂,温度、气流、风速、造成多镜头无规律非线性变形,系统精度只能达到毫米量级,且原有定标精度也难以在实飞中实现。
为解决上述问题,本文模拟外拼接相机、内拼接相机,以及一次成像、二次成像数字航摄相机结构,构建数字航摄相机通用物理模型,总结现有数字航摄相机系统四大技术特征。接着,研究可变基高比时空模型,该模型表达数字相机空间、时间参量与基高比关系,基于该模型可链接相机光学、机械参数与高程精度;试验表明该模型正确。以上述理论为依据,建立二次成像数字航摄相机(twice imaging digital camera,TIDC)原型系统,推导TIDC系统成像参数;由于光路能量非线性衰减、人工光学元件同光轴难以保障使得TIDC影像质量欠佳。为此,依据精密光学折反式原理开展光路设计,说明单刚体结构的n次折反式同光路系统与n次成像系统物理等效性,推导n次折反式相机的光学成像参数;构建宽波段临边成像光谱仪,试验证明,n次折反式同光路方法能较好地解决光路衰减、光学元件同光轴的问题。通过上述理论推导与原型实现得出数字航摄相机设计原则:设计时应根据测绘精度要求,运用可变基高比时空模型控制光学、机械参量;具体系统实现时,耦合单刚体高精密折反式同光路结构,从平台设计方面保障系统精度,为后续数据处理提供支撑。
1 数字航摄相机通用物理模型与4个对偶技术特征目前航空数字成像系统种类繁多但没有通用的物理模型,致使航摄相机设计时缺乏理论依据,且系统光机参数与地面精度脱节。为此,本节从模拟一次成像、二次成像、内拼接相机和外拼接相机出发,构建数字航摄相机通用物理模型;而后总结现有数字航摄相机的四大技术特征。
1.1 数字航摄相机通用物理模型本节提出数字航摄相机通用物理模型,如图 1所示。通用物理模型包括:大孔径光学镜头L1、承影器件I1、数字拼接相机(C1、C2、…、Cn,n代表参与成像的镜头数目)及数字相机承影面I2。

|
| 图 1 通用物理模型示意 Fig. 1 Schematic of unified physical model |
依据大孔径光学镜头L1的物像中心投影关系,将承影器件I1置于大孔径光学镜头L1的成像面处,设置承影器件I1平面与主光轴垂直。数字拼接相机(C1、C2、…、Cn)置于承影器件I1的后方,对I1进行成像。当物理模型只包含L1和I1,描述一次成像单镜头模型,对应胶片式航摄仪、单镜头数码相机航摄仪。当物理模型只包含I2和(C1、C2、…、Cn),描述拼接相机的成像方式,对应航摄外拼接相机和CCD内拼接相机。当物理模型同时包含L1、I1、(C1、C2、…、Cn)和I2,描述二次成像方式,对应于二次成像数字航摄相机。依据通用物理结构可以绘制如图 2的数字航摄相机通用光路图。为简化模型,本文未给出相机成像角度情况。

|
| 图 2 数字航摄相机通用光路图 Fig. 2 General optical pathway of digital aerial camera |
1.2 数字航摄系统四类对偶技术特征
数字航摄相机和传统胶片式航摄相机在结构设计、成像方式、投影方式等方面均存在较大差异[2, 7]。
结构设计方面,数字航摄相机分为内视场拼接与外视场拼接两类。外视场拼接有SWDC相机[8]和DMC相机[9];内视场拼接相机有DMZ相机[10-11]、UCD相机[12]和本文的TIDC[13]相机。
成像方式方面,分为一次成像相机和n次成像相机[14]。例如,SWDC相机、ADS40相机[15]、DMC相机属于一次成像相机,而UCD相机和TIDC相机属于n次成像系统中的二次成像相机。
投影方式而言,外视场拼接的航摄相机属于多中心投影;内拼接航摄相机具有唯一的光学系统和焦平面,在一次承影面上满足严格中心投影,而后分镜头成像,成像几何物理意义明确、理论严密。
由于相机结构、成像和投影方式不同,数字航摄相机系统发展出有别于经典摄影测量的基线——内基线;以5×3的相机阵列为例,内视场基线的形式如图 3所示。本文将内/外视场基线、多度重叠基线概括为“广义基线(generalized baseline)”。

|
| 图 3 内视场拼接基线形式示意图 Fig. 3 Schematic of the form of in-field multi-CCD baseline |
归纳数字航摄相机的技术特征得到图 4,现有航空成像系统具有对偶的4类技术特征:一次-二次成像、外拼接-内拼接、单基线-多基线、非严格-严格中心投影。

|
| 图 4 数字航摄相机4大技术特征 Fig. 4 Four major technical characteristics of digital aerial camera |
2 可变基高比时空模型与有效性验证
依据数字航摄相机通用模型,本节建立可变基高比时空模型,以此为纽带得到航摄系统光机参量与高程精度链接模型,试验证明该链接模型的正确性。通过可变基高比时空模型,从测绘精度出发对系统参数加以约束,为后端智能化软件处理提供精度保障。
2.1 可变基高比时空模型经典基高比定义为基线与高程之比[16];基高比是影响航空摄影测量结果精度的主要参数,基高比越大,高程精度越高;基高比越小,高程精度越低[17]。数字航摄相机、广义基线的出现使得基高比具有新的特点:①数字航摄相机多拼接、光电参数可调的特点,使基高比成为数字相机内部光学机械空间参数的函数表达;②通过调整数字航摄相机的时间参数,例如CCD积分时间、隔行扫描成像时间,使得基高比的数值发生变化,成为数字相机时间参数的函数表达。基于上述特征,本节建立可变基高比时空模型。
从数字航摄相机内部空间结构出发,基高比可以用承影面航向长度和镜头焦距之比来表达。
 (1)
(1)
式中,R为基高比;B为基线长度;H为相对航高;f1为大孔径光学镜头焦距;qx为航向重叠度;m1为一次承影器件航线方向的像元数;δ1为一次承影器件上探测单元的尺寸;Lx为承影器件I1航线方向长度。
若存在二次成像镜头,则Lx可以表示为
 (2)
(2)
式中,f2为二次成像镜头焦距;h为二次成像镜头距一次承影器件的物距;lx为二次成像系统传感器面阵航线方向的尺寸,该尺寸由二次承影面CCD的探测单元尺寸δ2、CCD像元数m2及CCD拼接方式决定。
将式(2)代入式(1)得到可变基高比时空模型R′
 (3)
(3)
对于一次成像系统,如胶片航摄相机或单个数码相机,不存在二次成像镜头和二次承影面。因此,h/f2可以视1,lx=Lx则R′= 
对于外视场拼接相机,由于不存在承影器件和大孔径光学镜头,只有多个数字拼接相机组成的二次承影面,此时航线方向尺寸为lx,大孔径光学镜头焦距f1=h= 1, 则
 (4)
(4)
本文推导的可变基高比时空模型(3)将基高比与航摄仪光机参数联系起来,该模型适用于胶片航摄相机、多相机拼接数字航摄系统及二次成像航摄相机。可变基高比时空模型应是相机焦距、承影面航向尺寸、物距等硬件结构和CCD积分时间t1、隔行扫描成像时间t2的函数[18]。分析可知,CCD积分时间t1越长,表明镜头对地物凝视时间越长,摄站间曝光时间间隔越短,使得相同摄影条件下基高比变小,精度变低。隔行扫描成像时间t2越长,立体影像之间的角度越大、基高比参数越大。
下面推导可变基高比时空模型与高程精度的关系,将相机内部光学机械参数与地表高程精度链接起来。
2.2 航摄系统光机参量与高程精度链接模型摄影测量中立体像对的基高比值、方位元素精度、像平面坐标量测精度决定前方交会精度[21]。其中,影像外方位元素精度由空中三角测量精度决定,属于数字摄影测量算法研究范畴。本文关注相机设计方法,以可变基高比时空模型为纽带,探讨光学机械参数对精度的影响。
像平面坐标量测精度由影像空间分辨率和量测精度共同决定,如下式
 (5)
(5)
式中,k为一个常量由量测精度决定;GSD为影像的空间分辨率,由相对航高H、相机焦距f、CCD物理尺寸δ共同决定。
假设航摄相机垂直地面摄影时地面空间分辨率GSD↑
 (6)
(6)
式中,H为相对航高;f1、f2为相机焦距;h为二次成像镜头距一次承影器件的物距;δ1、δ2为CCD物理尺寸。
基高比与高程精度MZ的关系[22]可以表达为
 (7)
(7)
式中,MXY为立体定位平面精度;R为基高比。将可变基高比时空模型式(3)代入式(7)得到MZ的表达式为
 (8)
(8)
进一步,式(6)代入(8)式得
 (9)
(9)
式(9)代表相机垂直地面摄影时光机参量与高程精度模型,可知要提升高程精度,应减小CCD探元物理尺寸δ2;增加航线方向CCD探元数目,以增大影像航向幅面lx。
2.3 精度模型有效性验证为验证航摄系统光机参量与高程精度链接模型正确性,基于中国测绘科学研究院的涿州地面检校场进行有效性验证。地面检校场整体效果如图 5所示,场内建有高50 m、吊臂长50 m的独立塔式吊车,地面布设近1000个控制点[23]。航摄相机采用SWDC-1相机,该相机由哈苏3D数码相机经过加固、精密单机检校改造完成。相机镜头焦距为35 mm,像素大小为6.8 um,CCD面阵长边为49 mm(7205行),CCD短边为36.8 mm(5412列)。相机在试验前经过了严格的实验室内定标。试验时将塔吊高度H固定为45 m,运用西门子星靶标准确检测相机的空间分辨率。

|
| 图 5 塔吊试验场示意图 Fig. 5 Schematic of tower crane test field |
通过改变CCD航线方向幅面lx、CCD探元物理尺寸δ,改变可变基高比数值。对比不同光机参数下的高程精度,验证光机参数与高程关联公式
| 立体像对编号 | 探元尺寸 /μm |
焦距 /mm |
航高 /m |
基线长 /m |
航向尺寸 /mm |
| 1 | 6.8 | 35 | 45 | 18.9 | 36.8 |
| 2 | 13.6 | 35 | 45 | 18.9 | 36.8 |
| 3 | 6.8 | 35 | 45 | 25.2 | 49 |
| 4 | 13.6 | 35 | 45 | 25.2 | 49 |
试验中,从测区选取20个检查点,依据二等水准测量技术要求测量检查点高程真值。分别对4个立体像对计算Mz,得到结果如表 2所示。
| 立体像对编号 | 理论GSD /mm |
理论计算 Mz/k/m |
高程实测精度Mz/m | 理论预测与实测符合情况 |
| 1 | 8.74 | 1.412 | 0.022 | 符合 |
| 2 | 17.49 | 2.824 | 0.040 | 符合 |
| 3 | 8.74 | 0.797 | 0.016 | 符合 |
| 4 | 17.49 | 1.593 | 0.026 | 符合 |
从表 2可得到以下结论:
(1) 将立体像对1和2对比、3和4对比可知,保持航摄相机其他参数不变,当CCD尺寸δ尺寸越小,理论计算得到GSD值越小、MZ/k越小,而实测Mz值减小,高程精度提高。精度模型(9)与实际情况符合。
(2) 将立体像对1与3对比、2与4对比可知,保持航摄相机其他参数不变,当增大影像在航线方向的尺寸lx时,理论计算得到MZ/k减小,而实测的Mz减小,高程精度提高。精度模型(9)与实际情况符合。
(3) 通过理论和试验研究,证明影像立体定位高程精度与相机内部几何参数的关系:在相同摄影条件下,为提高定位的高程精度,在光机参量设计方面,需要适当减小CCD探元物理尺寸δ、增大影像航向幅面lx。由可变基高比时空模型为纽带得到的光机参量-高程精度链接模型是正确的。
3 单刚体二次成像原型系统实现与n次成像物理模型推广传统多刚体拼接的一次成像系统在摄影测量应用中存在较多问题。例如,受CCD芯片尺寸限制,一次成像数字航摄相机成像面积低于传统胶片,且存在边缘非成像区域,成像不完整性[13]。同时,外拼接相机的多刚体结构,存在快门曝光不同步、相机受震动和温度影响较大等问题[16]。此外,长焦距设计有助于提高分辨率,但会带来平台结构尺寸的增大,影响平台组装与运行[17]。
本节针对上述一次成像系统问题,研制单刚体结构的二次成像系统(TIDC),为现有航摄系统朝单刚体-n次折反同光路设计奠定光机结构基础。
3.1 TIDC相机设计及原型实践TIDC是基于大口径、低畸变与高传输效能的胶片航摄相机的光学镜头,应用二次成像方法,集成多路、大面阵、高分辨率CCD数字成像与高速数据存储单元,构成新型航摄相机系统。TIDC的总体结构如图 6所示。

|
| 图 6 基于二次成像原理的数字航摄相机系统 Fig. 6 Digital aerial camera system based on twice-imaging |
TIDC相机系统物理模型包括:一次承影镜头L1、一次承影器件I1、多路数字成像单元C1、C2、…、Cn、二次数字承影面I2。据此实现TIDC系统结构和原型如图 6所示。系统组装时,一次成像镜头采用RMK-TOP型胶片航摄相机镜头;一次承影器件设计尺寸与航空胶片成像幅面等;数字后背尺寸和结构必须与RMK胶片式航摄相机镜头完全兼容,能精确地安装在原胶片式航摄相机的暗箱所在位置。综合考虑硬件成本及成像幅面,将数字后背设计为四拼接模式[24],运用FTF4052M面阵CCD芯片[25],整体装配后效果图如图 7所示。

|
| 图 7 数字后背结构装配体建模图 Fig. 7 Assembly model of digital backing structure |
二次成像光学构像具有以下特点[17]:
(1) 运用二次成像方法能够获取大幅面的航空数字摄影,影像面积与传统航摄仪相同。
(2) 多路平行光轴数字成像传感器进行二次成像采集,可实现获取多种分辨率数字图像组合,以满足不同水平的应用需求。
(3) 多路平行光轴光路系统的主光轴垂直于一次承影器件,且与CCD感光面相互平行,经过精密装调后,各光学系统主点位置与主平面倾斜角度误差都可以控制在一定范围以内且,大大降低图像几何校正的难度。
(4) 多路数字图像拼接生成的完整大幅面数字影像是满足一次承影镜头的严格中心投影构像几何关系,理论上系统误差极小。
(5) 经过严格证明,二次成像系统可以最大限度避免由于地面高程起伏与相邻镜头中心之间的距离而产生非严格中心投影影像拼接误差。
3.2 TIDC相机成像参数当TIDC垂直于地面成像时,依据相似比关系,易得
 (10)
(10)
此时TIDC地面分辨率保持与CCD探测单元尺寸成比的关系,比例系数是一次和二次成像过程物像距比例乘积。
实际航空摄影过程中,相机会与地面有一定倾斜角,推导倾斜情况下TIDC系统空间分辨率公式并推导至n次成像系统。
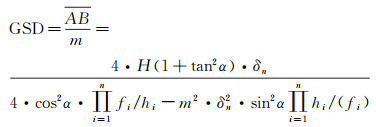
首先,推导倾斜摄影情况下一次成像的空间分辨率,设一次承影面上CCD芯片像元尺寸为δ1,一次成像承影面CCD面阵像元数目m×n(m为列数)。地面摄影范围是AB,相机的下底点为E。透镜的视场角为2×γ,相机的倾角为a,如图 8。可以推导得到平均地面分辨率GSD式(11),(具体推导见附录)。
 (11)
(11)

|
| 图 8 一次成像倾斜摄影投影几何 Fig. 8 Projection geometry of one time imaging oblique photography |
进一步可得,影像上任一点GSDx有
 (12)
(12)
当x=0时,β=γ,像素位于图像边缘处,地面分辨率达到最大值GSDmax
 (13)
(13)
当
 (14)
(14)
为将倾斜摄影状态下一次成像空间分辨率公式推导至二次成像相机,分析二次成像相机的几何投影特点:第一,一次承影器件影像与地表满足一次成像镜头的倾斜投影几何构像关系;第二,在精密光学设计下,二次成像影像与一次承影面之间满足垂直摄影构像几何关系,图 9表达了二次成像系统的光路图。摄影范围仍然是ABCD,其中相机的下底点为E。主透镜的半视角为γ,相机的倾角为α。


|
| 图 9 二次成像倾斜构像分析 Fig. 9 Analysis of twice-imaging oblique imaging |
因此,二次成像系统当相机对地面倾斜摄影时,平均地面分辨率GSD为
 (15)
(15)
式中,δ2为二次成像相机CCD尺寸;h是二次成像镜头距一次承影器件物距;f2是二次成像透镜焦距。当x=0时,地面分辨率达到最大值GSDmax
 (16)
(16)
当
 (17)
(17)
为了直观分析航摄范围、地面分辨率GSD随二次成像镜头焦距f2以及二次成像物距h的变化情况,本文以表 3参数对一次成像与二次成像进行比较得表 4、表 5。
| 参数 | 一次成像镜头焦距f1/mm | 二次成像镜头焦距f2/mm | 航向CCD像元数m | CCD像元尺寸r/um | 相机倾斜角度a/(°) | 航摄高度 H/m |
二次成像物距h/mm |
| 参数1 | 150 | 80 | 5344 | 9 | 10 | 500 | 150 |
| 参数2 | 150 | 90 | 5344 | 9 | 10 | 500 | 150 |
| m | |||||
| 类型参数 | 垂直摄影 | 倾斜摄影 | |||
| 一次成像 | 二次成像 | 一次成像 | 二次成像 | ||
| 摄影区域 | 160.320 0 | 300.600 | 165.436 7 | 310.819 2 | |
| 地面平均分辨率 | 0.030 0 | 0.056 3 | 0.031 9 | 0.060 0 | |
| 最低分辨率 | 0.030 0 | 0.056 3 | 0.033 2 | 0.060 3 | |
| 最高分辨率 | 0.030 0 | 0.056 3 | 0.029 7 | 0.054 1 | |
| m | |||||
| 类型参数 | 垂直摄影 | 倾斜摄影 | |||
| 一次成像 | 二次成像 | 一次成像 | 二次成像 | ||
| 摄影区域 | 160.320 0 | 267.200 0 | 165.436 7 | 276.120 5 | |
| 地面平均分辨率 | 0.030 0 | 0.050 0 | 0.031 9 | 0.053 3 | |
| 最低分辨率 | 0.030 0 | 0.050 0 | 0.033 2 | 0.054 1 | |
| 最高分辨率 | 0.030 0 | 0.050 0 | 0.029 7 | 0.048 5 | |
(1) 就摄影范围而言,二次成像较一次成像范围更大,可提升航摄作业效率。在二次成像航摄条件下,航摄范围随着二次成像镜头焦距f2的减小,呈现非线性的增大。
(2) 从地面平均分辨率而言,二次成像系统较一次成像系统分辨率低。二次成像航摄条件下,平均地面分辨率随着二次成像镜头焦距f2的增大,数值上呈现非线性的减小,体现为平均地面分辨率提高。
(3) 在倾斜摄影条件下,就最大与最小地面分辨率之间的差异而言,二次成像较一次成像有所降低,即通过二次成像方法可以获得地面分辨率变化小、成像更加稳定的遥感影像。
(4) 在二次成像摄影条件下,平均地面分辨率的数值随着二次成像尺寸m的增大而呈现近似线性的增大,平均地面分辨率降低。
TIDC系统是n次成像系统特例,属于单刚体结构,能有效避免多刚体结构受温度、震动非线性影响。本文继续推导n次成像系统成像参数。
3.3 由二次成像向n次成像模型推广基于二次成像原理,若n次成像系统垂直于地面成像时,依据相似比关系获得
 (18)
(18)
式中,hi为第i个光学镜头距离第i-1个光学承影面的物距;fi为第i个光学镜头焦距。
当倾斜角为a时,n次成像数字航摄仪地面平均分辨率为
 (19)
(19)
式中,各参数意义与式(15)一致,其形式与TIDC系统类似,对于n次成像数字航摄相机光机参量与高程精度关系
 (20)
(20)
在实际航飞试验中,由于光路非线性衰减效应、人工多元件同光轴工艺制约了TIDC系统的影像质量。由此可知,若成像次数增多,光路衰减现象会更加严重、同光轴工艺会更加难以实现。为此,如下引入n次折反式同光路,为数字航摄相机提供通用的硬件设计保证。
4 单刚体n次成像与n次折反同光路精密模型等效及通用结构实现本节探索单刚体n次折反式结构与n次成像结构的等效性。接着,依据高分辨率航空系统对长焦距的需求,将其转化为n次折反系统的等效焦距,进而将现在普遍使用的多刚体一次成像拼接相机转化为单刚体n次折反式精密光机结构。试验表明,依据精密光机模型建立的n次折反式系统降低了光学衰减效应、保证了多参量光学结构间的严格中心投影;且与单光路或一次成像系统相比,其体积、重量增加不多,但分辨率、精度极大提升;在航飞过程中,其单刚体结构保障了精度不变、形变可控。
4.1 单刚体n次折反式光路与n次成像物理模型等效性分析n次折反式同光路系统,具有无色差、等效焦距较大、易于轻量化等优点,逐渐成为星载遥感系统的主要形式。图 10为折反式系统的原理图,由主镜、次镜和校正透镜组(校正器)组成;其中主镜和次镜都是非球面,且成像面的前端加了校正器,校正轴外像差。目标场景的辐射依次经过主镜、次镜和校正器成像在像面上。图 11为采用此原理的实际空间相机的折反光学结构图。

|
| 图 10 折反式系统原理图 Fig. 10 Schematic of catadioptric system |

|
| 图 11 折反式一次成像空间相机光学结构图 Fig. 11 Optical structure of catadioptric one imaging space camera |
对于n次折反同光路系统,系统由n个镜头组成,其系统整体焦距f可由下列公式表达[26]
 (21)
(21)
式中,f1、f2、f3、…、fn代表n次折反系统中每个镜头的焦距;Δ代表折反系统光学透镜组光学系数。当n次折反同光路系统垂直地面成像时
 (22)
(22)
分析可知,n次折反同光路系统与n次成像系统均是在相机内部通过增加镜头形成的多次成像光路,镜头与镜头间垂直且同光轴;不同在于结构实现上,n次折反同光路系统采用精密光学的方法实现,而n次成像系统采用人工内拼接串联式构建。从物理成像方式而言,两种系统是等效的。
从数学表达形式而言,上节中推导的垂直成像情况下n次成像系统的空间分辨率式(18),从形式上与式(22)是一致的。
综上两点,n次折反式成像系统的等效焦距与n次成像系统的总焦距是一致的,上节推导的n次成像系统的参数可以运用于n次折反同光路系统。因此,可以依据航空遥感多次成像需求即等效焦距需求,将现在普遍使用的多刚体拼接相机方法,转化为n次折反式单刚体精密光机结构加以实现。
4.2 n次折反式同光路成像系统实现依据n次折反式同光路设计,建立宽波段临边成像光谱仪[27],光学系统结构如图 12所示,光学系统加工、装调后实物照片如图 13。

|
| 图 12 宽波段临边成像光谱仪光学结构图 Fig. 12 Optical structure of wideband limb imaging spectrometer |

|
| 图 13 宽波段临边成像光谱仪实物照片 Fig. 13 Wideband limb imaging spectrometer |
宽波段临边成像光谱仪的校正透镜加工、检测完成后,镀增透膜,双面平均透射率在98%以上。5片校正透镜的总透射率为0.985=0.9。主、次镜均镀银膜,工作波段内的平均反射率在97%以上,则相机系统的总透射率为0.9×0.97×0.97=84.68%,满足系统透射率高于70%的指标要求。
宽波段临边成像光谱仪的光路能量透过率测算结果以及表 6的结果表明,n次折反式同光路系统确保了光学衰减效应最小和严格中心投影;且与一次成像系统相比,其体积、重量增加不多,但分辨率、精度极大提升;在航飞过程中,其单刚体结构保障了精度不变,形变可控。
| 项目 | 曲率半径 /mm |
间距 /mm |
X偏心 /mm |
Y偏心 /mm |
X倾斜 /(″) |
Y倾斜 /(″) |
圆锥系数K | 面型精度 (RMS值λ=0.632 8 μm) |
| 孔径光阑 | — | ±0.1 | ±0.05 | ±0.05 | 10 | 10 | — | — |
| 望远物镜 | ±0.2 | ±0.01 | ±0.05 | ±0.05 | 10 | 10 | ±0.01 | 0.02λ |
| 入射狭缝 | — | ±0.02 | ±0.01 | ±0.05 | 10 | 10 | — | — |
| 平面反射镜 | — | ±0.02 | ±0.1 | ±0.1 | 10 | 10 | — | 0.02λ |
| 准直镜 | ±0.5 | ±0.1 | ±0.05 | ±0.05 | 10 | 10 | ±0.01 | 0.02λ |
| 棱镜 | — | ±0.1 | ±0.02 | ±0.05 | 10 | 10 | — | 0.02λ |
| 成像镜 | ±0.5 | ±0.02 | ±0.05 | ±0.05 | 10 | 10 | ±0.01 | 0.02λ |
| 滤光片表面1 | — | ±0.02 | ±0.1 | ±0.1 | 10 | 10 | — | 0.02λ |
| 滤光片表面2 | — | ±0.02 | ±0.1 | ±0.1 | 10 | 10 | — | 0.02λ |
| 像面 | — | — | ±0.1 | ±0.1 | 10 | 10 | — | — |
5 结论与展望
(1) 以模拟多种形式的数字航摄相机出发,发展数字航摄相机的通用物理模型[28],分析归纳了现有数字航摄系统四大对偶的技术特征:一次-二次成像,外拼接-内拼接,单基线-多基线,非严格-严格中心投影;为现有航摄相机多刚体拼接转换为单刚体、多次成像数字航摄相机提供基础。
(2) 发展可变基高比时空模型[29-30],将可变基高比分别表达为数字航摄相机内部几何空间函数;研究并推导光机参量与高程精度模型。基于涿州地面检校场对此精度模型进行验证。试验结果表明:通过改造数字航摄相机,减小CCD探元的物理尺寸、增大CCD面阵航向尺寸,能够提高立体定位的高程精度。
(3) 基于可变基高比时空模型、单刚体机械结构和二次成像理论,设计并实现了TIDC系统,推导该成像参数并推广到n次成像系统。
(4) 针对TIDC系统光路能量非线性衰减、人工同光轴难以实现的问题,引入精密光学精密机械的n次折反式光路设计方法,实现宽波段临边成像光谱仪。该系统解决了TIDC光路能量的衰减、多光学元件同光轴的问题;同时,n次折反同光路系统与n次成像系统在梳理方面的等效性,可以得到n次折反式同光路系统的成像参数;可知,随着等效焦距的增大,高程精度也能得以保证。
以上述理论推导与原型实践,得到数字航摄成像系统设计原则:运用可变基高比时空模型控制光学、机械参量,实现系统精度的精密刻画。相机系统实现时,应耦合单刚体结构和高精密折反式光路系统设计,达到高精度、工艺简单、体积小、载重轻的目的,实现航空遥感载荷规范化、模块化、产业化,为高分辨率航空遥感系统的数据处理和应用提供硬件保障。
附录: (1)
(1)
所以,视场角的一半
 (2)
(2)
 (3)
(3)
同理
 (4)
(4)
所以,
 (5)
(5)
式中,ab=m×δ1,平均地面分辨率GSD
 (6)
(6)
致谢: 本文作为多个团队2006年起的10余年合作成果,首次在国内外正式发表,感谢段依妮、刘先林、丁晓波、王家琪给予的贡献和帮助。
| [1] |
李德仁, 袁修孝.
误差处理与可靠性理论[M]. 2版. 武汉: 武汉大学出版社, 2013.
LI Deren, YUAN Xiuxiao. Error Processing and Reliability Theory[M]. 2nd ed. Wuhan: Press of Wuhan University, 2013. |
| [2] |
张祖勋, 张剑清.
数字摄影测量学[M]. 武汉: 武汉大学出版社, 2001.
ZHANG Zuxun, ZHANG Jianqing. Principles of Digital Photogrammetry[M]. Wuhan: Press of Wuhan University, 2001. |
| [3] |
童小华, 叶真, 刘世杰.
高分辨率卫星颤振探测补偿的关键技术方法与应用[J]. 测绘学报, 2017, 46(10): 1500–1508.
TONG Xiaohua, YE Zhen, LIU Shijie. Essential Technology and Application of Jitter Detection and Compensation for High Resolution Satellites[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1500–1508. DOI:10.11947/j.AGCS.2017.20170384 |
| [4] |
张建霞, 刘宗杰, 刘先林.
国产数码航摄仪应用于我国西部测图分析[J]. 测绘科学, 2010, 35(1): 36–38.
ZHANG Jianxia, LIU Zongjie, LIU Xianlin. The Simple Analysis of the Application of Chinese Digital Aerial Camera to Western Mapping in China[J]. Science of Surveying and Mapping, 2010, 35(1): 36–38. |
| [5] |
段福洲, 宫辉力, 李小娟, 等.
SWDC数字航空摄影仪在特大地震灾害中的应用[J]. 自然灾害学报, 2009, 18(5): 36–40.
DUAN Fuzhou, GONG Huili, LI Xiaojuan, et al. Application of SWDC Aerial Digital Camera to Violent Earthquake Disasters[J]. Journal of Natural Disasters, 2009, 18(5): 36–40. |
| [6] |
李天子, 王留召.
大面阵数字航摄仪-SWDC系统优势及应用[J]. 辽宁工程技术大学学报(自然科学版), 2013, 32(6): 797–801.
LI Tianzi, WANG Liuzhao. System Advantage and Application of Digital Airborne Photogrammetric Camera-SWDC With Larger Plane Array[J]. Journal of Liaoning Technical University (Natural Science), 2013, 32(6): 797–801. |
| [7] |
何欣年.
航空数字相机的发展与应用[J]. 遥感技术与应用, 2000, 15(2): 124–129.
HE Xinnian. Development and Application of Airborne Digital Camera[J]. Remote Sensing Technology and Application, 2000, 15(2): 124–129. DOI:10.11873/j.issn.1004-0323.2000.2.124 |
| [8] |
李健, 刘先林, 刘凤德, 等.
SWDC-4大面阵数码航空相机拼接模型与立体测图精度分析[J]. 测绘科学, 2008, 33(2): 104–106.
LI Jian, LIU Xianlin, LIU Fengde, et al. Mosaic Model of SWDC-4 Large Form at Aerial Digital Camera and Accuracy Analysis of Stereo Mapping[J]. Science of Surveying and Mapping, 2008, 33(2): 104–106. |
| [9] | HINZ A, HEIER H. The Z/I Imaging Digital Camera System[J]. The Photogrammetric Record, 2000, 16(96): 929–936. DOI:10.1111/0031-868X.00158 |
| [10] |
赵桂华. 大面阵CCD数字航空相机影像预处理技术研究[D]. 郑州: 解放军信息工程大学, 2012. ZHAO Guihua. Research on Image Preprocessing of Large Format CCD Digital Aerial Camera[D]. Zhengzhou: PLA Information Engineering University, 2012. http://cdmd.cnki.com.cn/Article/CDMD-90005-1013161297.htm |
| [11] |
方勇, 崔卫平, 马晓锋, 等.
单镜头多面阵CCD相机影像拼接算法[J]. 武汉大学学报(信息科学版), 2012, 37(8): 906–910.
FANG Yong, CUI Weiping, MA Xiaofeng, et al. Image Stitching Algorithm of Digital Camera with Single Field Lens and Multiple Area CCD[J]. Geomatics and Information Science of Wuhan University, 2012, 37(8): 906–910. |
| [12] | LEBERL F, GRUBER M. ULTRACAM-D: Understanding Some Noteworthy Capabilities[C]//Photogrammetric Week 2005. Stuttgart: [s. n. ], 2005: 57-68. |
| [13] |
沈添天, 赵康年, 赵世湖, 等.
二次成像航摄相机数字后背的设计与定标[J]. 全球定位系统, 2009, 34(3): 33–37.
SHEN Tiantian, ZHAO Kangnian, ZHAO Shihu, et al. Design and Calibration for Digital Backing System of Twice-Imaging Aviation Camera[J]. GNSS World of China, 2009, 34(3): 33–37. |
| [14] |
段依妮. 遥感影像立体定位的相对辐射校正和数字基高比模型理论研究[D]. 北京: 北京大学, 2015. DUAN Yini. Study on Relative Radiometric Correction and Digital Baseline-height Ratio Model for Stereo Mapping[D]. Beijing: Peking University, 2015. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2667832 |
| [15] | CRAIG J C. Comparison of Leica ADS40 and Z/I Imaging DMC High-resolution Airborne Sensors[C]//Proceedings of Volume 5655, Multispectral and Hyperspectral Remote Sensing Instruments and Applications Ⅱ. Honolulu, Hawai'i: SPIE, 2005, 5655: 271-281. |
| [16] |
王之卓.
摄影测量原理[M]. 武汉: 武汉大学出版社, 2007.
WANG Zhizhuo. Principles of Photogrammetry[M]. Wuhan: Press of Wuhan University, 2007. |
| [17] | ACKERMANN F. Practical Experience with GPS Supported Aerial Triangulation[J]. The Photogrammetric Record, 1994, 14(84): 860–874. DOI:10.1111/phor.1994.14.issue-84 |
| [18] |
段依妮.
遥感影像立体定位的相对辐射校正和数字基高比模型理论研究[J]. 测绘学报, 2015, 44(2): 235–235.
DUAN Yini. Study on Relative Radiometric Correction and Digital Baseline-height Ratio Model for Stereo Mapping[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(2): 235–235. DOI:10.11947/j.AGCS.2015.20140373 |
| [19] |
张剑清, 胡安文.
多基线摄影测量前方交会方法及精度分析[J]. 武汉大学学报(信息科学版), 2007, 32(10): 847–851.
ZHANG Jianqing, HU Anwen. Method and Precision Analysis of Multi-baseline Photogrammetry[J]. Geomatics and Information Science of Wuhan University, 2007, 32(10): 847–851. |
| [20] | DUAN Yini, YAN Lei, ZHONG Yubiao, et al. A New Method of Improving Height Accuracy of Airborne Photogrammetry Using a Multi-camera System[C]//Proceedings of 2014 IEEE International Geoscience and Remote Sensing Symposium. Qubec City: IEEE, 2014: 13-18. |
| [21] |
姚继锋. 多传感器集成检校的理论方法与实践[D]. 青岛: 山东科技大学, 2011. YAO Jifeng. The Theoretical Approach and Praxis of Multi-sensor System Calibration[D]. Qingdao: Shandong University of Science and Technology, 2011. http://cdmd.cnki.com.cn/Article/CDMD-10424-1012277215.htm |
| [22] |
张祖勋.
航空数码相机及其有关问题[J]. 测绘工程, 2004, 13(4): 1–5.
ZHANG Zuxun. Aspects on Aerial Digital Cameras[J]. Engineering of Surveying and Mapping, 2004, 13(4): 1–5. |
| [23] |
赵世湖. 数字航摄相机几何辐射传输模型的建立及二次成像原型系统验证[D]. 北京: 北京大学, 2010. ZHAO Shihu. Digital Aerial Camera's Geometric Radiative Modeling and Its Validation in Twice Imaging Prototype System[D]. Beijing: Peking University, 2010. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1775049 |
| [24] |
张红蕾. 新型航摄相机多路成像控制与光机结构设计及一体化实现[D]. 北京: 中国矿业大学, 2009. ZHANG Honglei. Multi-channel Imaging Control and Opto-mechanical Structure Design and Integrated Implementation of New Aerial Camera[D]. Beijing: China University of Mining and Technology, 2009. |
| [25] | DALSA Professional Imaging. FTF4052M 22M full-frame CCD image sensor data sheet[M]. Canada: DALSA, 2006. |
| [26] |
郁道银, 谈恒英.
工程光学[M]. 北京: 机械工业出版社, 2011.
YU Daoyin, TAN Hengying. Engineering Optics[M]. Beijing: China Machine Press, 2011. |
| [27] |
薛庆生.
折反式大口径星敏感器光学设计及杂散光分析[J]. 光学学报, 2016, 36(2): 171–177.
XUE Qingsheng. Optical Design and Stray Light Analysis for Large Aperture Catadioptricstar Sensor[J]. Acta Optica Sinica, 2016, 36(2): 171–177. |
| [28] |
晏磊, 李英成, 段晓辉, 等. 一种二次成像摄影方法及装置: 中国, CN200710099585. 7[P]. 2007-10-24. YAN Lei, LI Yingcheng, DUAN Xiaohui, et al. Secondary Imaging Shooting Method and Device: CN, CN200710099585. 7[P]. 2007-10-24. |
| [29] |
晏磊, 段依妮, 赵红颖, 等. 一种利用数字基高比时间模型的高程定位精度提升方法: 中国, CN201410406891. 0[P]. 2014-08-18. YAN Lei, DUAN Yini, ZHAO Hongying, et al. Elevation Positioning Accuracy Lifting Method Using Digital Base-height Ratio Time Model: CN, CN201410406891. 0[P]. 2014-08-18. |
| [30] |
晏磊, 赵海盟, 段依妮, 等. 一种基于数字基高比模型的高程精度估算方法: 中国, CN201410058165. 4[P]. 2014-02-20. YAN Lei, ZHAO Haimeng, DUAN Yini, et al. Vertical Accuracy Estimation Method Based on Digital Base-height Ratio Model: CN, CN201410058165. 4[P]. 2014-02-20. |