



2. 南京信息工程大学地理与遥感学院, 江苏 南京 210044
2. School of Geography and Remote Sensing, Nanjing University of Information Science and Technology, Nanjing 210044, China
近年来,三维激光扫描技术在现代测绘中得到广泛的应用和推广,它不仅能够快速大面积获取地表的空间位置和属性信息,还具有耗时少、成本低等特点。在实际生产应用中,根据搭载平台的不同,可分为固定站激光扫描系统、车载激光扫描系统、机载激光扫描系统和船载激光扫描系统[1-3]。船载三维激光扫描系统因其自动化程度高、测量速度快、运行成本低、可降低人工测量危险等优点,在河道测量、滩涂堤岸测量和海岛海岸带测量中具有独特的优势和应用前景[4]。
船载三维激光扫描系统主要由载体平台、IMU惯性测量系统(INS/GNSS组合)、三维激光扫描仪、数据采集存储和数据处理软件组成,所有的传感器和设备都固定在稳定的船载平台上[5-7]。船载三维激光扫描系统获取目标坐标的精度不仅取决于单个传感器的精度,也受传感器之间位置关系的参数精确与否影响[8-10]。一般情况下,商用移动测量系统产品中多传感器的综合参数通常已经确定,但各传感器之间的空间位置和方位关系会在载体移动时产生震动而偏移,进而影响测量精度。目前对于此类误差源的标定,还没有统一有效的方法[11]。2003年6月,美国国家标准与技术研究所举办了LiDAR(light detection and ranging)检校研究讨论会议,讨论和总结了LiDAR的检校成果,确定检校实验室所需要的物质条件,开发和商议了LiDAR实验场的可行计划,并建立了激光扫描仪检校标准[12]。文献[13]依据扫描仪误差类型,提出结合全站仪和扫描仪确定扫描仪参数检校模型的方法。文献[14]利用经纬仪误差模型,提出了一种附加七参数的三维自由网自检校模型,并对Faro 880进行了扫描检校。文献[15]对地面移动三维激光扫描系统进行了系统的质量评估和精度评定,得到了获取点云三维坐标的准确度和精度。国内也开展了相应的研究,文献[11]研究了多传感器的综合参数标定方法及移动扫描系统的空间数据融合算法。文献[16]在机载激光测高系统的基础上,在不需要获取地面点真实坐标的情况下,提出了一种利用重叠航带检校法,并给出了相应的数学模型。文献[17]总结了三维激光扫描系统误差确定方法,提出了自检校法对仪器进行系统误差标定。文献[18]研究使用经纬仪工业测量进行船载测量系统多传感器空间位置与姿态的高精度标定,并对用于水上部分检校的室外检校场建立进行了探讨。文献[19]提出了一种无地面控制点且使用多次扫描数据进行车载激光扫描参数标定方法,提高了参数标定的灵活性和可行性。
不同于车载三维激光扫描系统,目前多数船载三维激光扫描系统需根据作业区域现场租借船舶,进行安装与标定,标定方法根据作业区域实际情况制定。由于船载激光扫描的特性及扫描目标的位置分布特征,标定目标选取、同名点确定以及船体晃动等因素都会对系统的标定精度产生较大影响。本文基于稳健的同名点选取策略,在船载三维激光扫描数据时空配准数学模型的基础上,推导扫描系统安置参数标定模型,最后采用差分最小二乘算法求解参数最优值,并通过试验验证本文方法的合理性和有效性。
1 船载三维激光扫描数据时空配准模型为将采集的三维激光扫描坐标转换为WGS-84坐标,需对每个历元时刻进行空间配准和坐标转换。涉及的坐标系统包括:三维激光扫描仪极坐标系、三维激光扫描仪直角坐标系、IMU直角坐标系、平台参考坐标系、WGS-84坐标系。具体转换过程为:扫描仪极坐标系→扫描仪直角坐标系→IMU坐标系→平台参考坐标系→WGS-84坐标系,如图 1所示。

|
| 图 1 船载三维激光扫描系统定位示意图 Fig. 1 Ship-borne 3D laser scanning system location schematic diagram |
各坐标系定义如下:
(1) 三维激光扫描仪极坐标系(r, Φ, θ),以三维激光扫描仪激光发射点为坐标原点,r为激光发射点与探测物体间的几何距离,Φ、θ分别为三维激光扫描仪极坐标系下的方位角和高度角。
(2) 三维激光扫描仪直角坐标系(XL, YL, ZL),以三维激光扫描仪激光发射中心为坐标原点,以船舶航行的方向为X轴,Y轴指向激光发射的方向,XOY平行于整个扫描平台,Z轴垂直于XOY平面向上,构成右手直角坐标系。
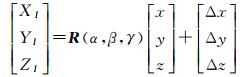
(3) IMU直角坐标系(XI, YI, ZI),以IMU中心为坐标原点,X、Y、Z轴方向与三维激光扫描仪3轴方向相互平行。
(4) 平台参考坐标系(XR, YR, ZR),以两个GPS天线的中心为坐标原点,Z轴与参考椭球的法线重合,X轴与Z轴垂直指向正东方向,Y轴垂直于XOZ平面指向正北方向。
(5) WGS-84坐标系(X84, Y84, Z84),以地球质心为坐标原点,Z轴指向BLH定义的协议地球极(CTP)方向,X轴指向BLH的零子午面与CTP赤道的交点,Y轴与X轴、Z轴构成右手直角坐标系。
船载三维激光扫描系统时空配准的数学模型为
 (1)
(1)
式中,R为子午线收敛角组成的旋转矩阵;RRI是由POSMV提供的IMU系统的姿态参数组成的旋转矩阵;RIL是由激光扫描仪直角坐标系和IMU 3轴方向不平行所形成的夹角组成的旋转矩阵;ΔXIL、ΔYIL、ΔZIL是激光扫描仪中心和IMU中心之间的平移参数;ΔXRI、ΔYRI、ΔZRI是IMU中心和参考坐标系中心之间的平移参数;ΔXGR、ΔYGR、ΔZGR是GPS相位中心和参考坐标系中心之间的平移参数。通常定义船舶的重心点为参考坐标系中心,但船舶重心点是一个相对模糊的点,因此也常定义IMU中心为参考坐标系中心。其中,RIL、ΔXIL、ΔYIL、ΔZIL是需要标定的船载三维激光扫描系统的安置参数。
2 船载三维激光扫描系统安置参数标定模型由于三维激光扫描仪、IMU惯性测量系统的坐标原点通常在仪器内部,进行船载三维激光扫描系统安置参数值的精确测量比较困难;且随着仪器的使用和磨损,通过工业量测获取的安置参数值也存在误差。如果船载三维激光扫描系统存在安置参数误差,则不同测线对同一地物进行扫描得到的坐标会产生差异。利用这种差异,匹配不同测线重叠区域内的同名点,在船载三维激光扫描数据时空配准数学模型的基础上,建立安置参数标定模型,解算安置参数值,修正船载三维激光扫描数据的坐标值。
2.1 同名点选取由于船载激光扫描的特性及航行的安全性,扫描目标一般都位于船的一侧,且船舶距扫描目标都较远、难以靠近。受靶标大小、稳定性及检校区域条件等实际因素的限制,难以在检校区域布设靶标,因此通常选取扫描区域中的固有目标进行安置参数标定。码头上的电线杆、灯塔等杆状目标特征明显、位置独特、便于标定测线布设,成为船载激光扫描系统安置参数标定的首选目标。文献[20-24]已经对点云数据中杆状目标的自动提取进行了较多的研究。本文根据文献[22]中的点云聚类方法,以已传播点云的延伸方向为约束,稳健聚类出场景中的各线状目标点云,可以避免将电线杆与电力线聚类为一体的常见问题。根据杆状物的特点:聚类后的点云呈竖直杆状,且具有一定的高程,制定如下几何约束条件
SL=line, SP=Z, SH=T
式中,SL=line表示该聚类点云形状呈线状;SP=Z表示其方向竖直;SH=T表示其具有一定的高程。根据该几何约束条件,可从各线状目标点云中,确定出场景中的杆状目标点云。
从各杆状目标点云顶端取出n个点(如n=15),计算其重心点,并搜索距离该重心点最近点作为各杆状物的顶部特征点。根据各杆状目标点云最底部的n个点的高程值计算其平均高程值h1,结合顶部特征点的高程h2,计算杆状目标的中部高程值:h=h1+(h2-h1)/2。由该高程值截取各杆状目标点云,可得多个杆状点,计算出其重心点,并搜索距离该重心点最近点作为杆状目标的中部特征点。同理,可得另一测线中各杆状目标的顶部和中部特征点。由于两条测线的激光点云已由船载定位系统实现了地理坐标协同,两站点云间几何偏差较小,所以可由最近邻搜索确定出两测线点云相应的同名点对。
2.2 安置参数标定船载三维激光扫描系统的安置参数包括3个平移参数ΔXIL、ΔYIL、ΔZIL和3个旋转参数RIL。为获取船载三维激光扫描系统的安置参数,将式(1)改写为
 (2)
(2)
式中,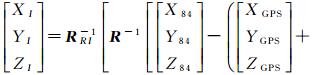


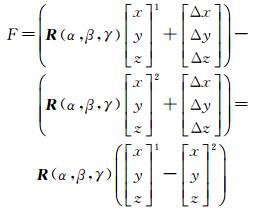
针对不同测线重叠区域内的同一地物点,进行相减处理,消去平移参数,得到函数F
 (3)
(3)
将式(3)进行线性化,利用泰勒级数展开取一阶项,得到
 (4)
(4)
式中,F0为初始值;ζ为无穷小的值。
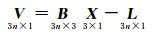
以IMU坐标系下的测量值作为基础值,列出误差方程
 (5)
(5)
式中,
假定选取n对同名点参与解算,则总的误差方程为
 (6)
(6)
式中,
利用间接平差,计算旋转参数的改正数为
 (7)
(7)
对获得的安置角改正数进行迭代计算,直到改正数的绝对值小于指定阈值。迭代的安置角初值选取X0=[0 0 0]T,迭代的最终结果为
 (8)
(8)
单位权中误差为
 (9)
(9)
求得安置角参数值后,将安置角参数带入式(2)进行解算,可求得平移参数值为
 (10)
(10)
船载三维激光扫描系统安置参数的总体计算流程如图 2所示。

|
| 图 2 船载三维激光扫描系统安置参数标定流程图 Fig. 2 Flow chart of mounted parameter calibration for ship-borne 3D laser scanning system |
3 试验与分析
为确定和检验船载三维激光扫描系统安置参数标定模型的准确性和有效性,利用本单位的船载三维激光扫描系统对山东省海阳市某码头两侧布设测线进行扫描,用于安置参数的标定,测线距离码头的距离应尽量相等。为了提高安置参数标定的精度,要求激光扫描仪与扫描目标的距离越近越好,但出于船舶航行安全等因素考虑,本次试验设定激光扫描仪与码头的平均水平距离为60 m,距离电线杆的平均水平距离为73 m。扫描区域相片见图 3。

|
| 图 3 扫描区域相片 Fig. 3 Image of scan region |
船载三维激光扫描系统的传感器采用加拿大Optech公司的ILRIS-LR激光扫描仪以及Applanix公司的POS MV 320系统,将激光扫描仪、IMU及GPS天线集成安装在过渡板上,测量船为租用的当地普通渔船,如图 4所示。连接好UPS、传感器及电脑等之间的电缆线及数据线,并配置电脑的网络设置,即可进行激光扫描数据的采集。

|
| 图 4 船载三维激光扫描系统 Fig. 4 Ship-borne 3D laser scanning system |
通过卷尺或全站仪初步测定船载三维激光扫描系统的安置参数初始值,测定3个平移参数初始值为:-0.269、0.038、0.159;3个旋转参数初始值为0。利用式(1)求解两条测线初始点云数据坐标值,点云图见图 5(a),两条测线重叠区域的地物主要为码头上的电线杆及电力线。通过图 5(a)可以看出,由于安置参数值存在误差,两条测线重叠区域内的目标点存在明显的位置偏差。

|
| 图 5 船载三维激光扫描数据安置参数标定前后对比 Fig. 5 Comparison before and after calibration of mounted parameter for ship-borne 3D laser scanning data |
进行船载三维激光扫描系统安置参数标定前,首先需要从两条测线重叠区域内选取同名特征点。选取时应根据重叠区域内地物目标在点云中的特征及分布等实际情况确定,选取特征明显的交点、拐角点等作为同名点。本文根据实际情况,自动选取了电线杆顶端及电线杆中部的6对同名点,经人工检核满足要求可用于安置参数的标定。设定相邻两次迭代误差值小于0.001为终止条件。根据本文安置参数标定模型的计算,获取3个最优平移参数值为:-0.269、0.039、0.167;3个最优旋转参数值为:0.001、-0.045、0.132。标定后的点云见图 5(b),可以看出,扫描重叠区域内的电线杆和电力线已经很好的重合。通过计算结果可知,标定前后的平移参数值以及roll与pitch值差别都比较小,只有heading值比较大。由此可以看出,不同测线点云数据的偏差主要是由安置角中的heading值引起的。
最后本文还对选取的同名点进行了安置参数标定前后坐标差值比对,见表 1。其中dx、dy、dz分别为选取的同名点在安置参数标定前的坐标差值,dx1、dy1、dz1分别为选取的同名点在安置参数标定后的坐标差值,单位为米。内符合平面精度由公式(11)计算得到
| 点号 | dx | dy | dz | dx1 | dy1 | dz1 | 标定后内符合平面精度 |
| 点1 | -0.430 | -0.120 | 0.070 | -0.027 | -0.014 | -0.022 | 0.035 |
| 点2 | -0.410 | 0.210 | 0.070 | 0.0420 | 0.0820 | -0.008 | 0.092 |
| 点3 | -0.350 | 0.020 | 0.090 | -0.031 | 0.053 | 0.037 | 0.061 |
| 点4 | -0.450 | 0.320 | 0.070 | -0.026 | 0.050 | -0.022 | 0.056 |
| 点5 | -0.560 | 0.100 | 0.040 | 0.048 | -0.001 | 0.083 | 0.048 |
| 点6 | -0.350 | 0.280 | 0.100 | -0.034 | 0.047 | 0.026 | 0.058 |
 (11)
(11)
根据表 1的计算结果分析可知,船载三维激光扫描系统安置参数标定前不同航带间同名点的平面位置偏差最大可达0.569 m,高程位置偏差最大值为0.10 m;对船载三维激光扫描系统进行安置参数标定后的平面位置最大偏差为0.092 m,在高程方向上的最大位置偏差为0.083 m。扫描定位精度可以满足1:500大比例尺数字测图精度要求,因此,可以应用船载三维激光扫描系统进行大比例尺数字测图[25]。
4 结论安置参数标定是船载三维激光扫描系统测量的必要步骤,能够有效地提高点云数据的精度。文中提出了一种适用于船载三维激光扫描系统安置参数标定的方法,利用测线重叠区域内的同名特征点,采用差分最小二乘方法求解安置参数标定模型的最优值。试验结果表明,该方法是一种切实可行且有效的船载三维激光扫描系统安置参数标定方法,能够显著提升获取点云数据的精度。进一步的研究将关注于GNSS与IMU、GNSS与激光扫描仪的参数标定方法研究,提高标定方法的适用性。
| [1] | YANG Bisheng, ZANG Yufu, DONG Zhen, et al. An Automated Method to Register Airborne and Terrestrial Laser Scanning Point Clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 109: 62–76. DOI:10.1016/j.isprsjprs.2015.08.006 |
| [2] | SCHWARZ K P, EL-SHEIMY N. Digital Mobile Mapping Systems-state of the Art and Future Trends[M]//TAO C V, LI J. Advances in Mobile Mapping Technology. London: Taylor & Francis, 2007: 3-18. |
| [3] |
徐进军, 余明辉, 郑炎兵.
地面三维激光扫描仪应用综述[J]. 工程勘察, 2008(12): 31–34.
XU Jinjun, YU Minghui, ZHENG Yanbing. Briefing on Terrestrial 3D Laser Scanner[J]. Geotechnical Investigation & Surveying, 2008(12): 31–34. |
| [4] |
张亮. 地面复杂环境下移动三维测量精度改善方法研究[D]. 武汉: 武汉大学, 2015. ZHANG Liang. Accuracy Improvement for Mobile Mapping in Complex Ground Environments[D]. Wuhan: Wuhan University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10486-1015306194.htm |
| [5] | LE SCOUARNEC R, TOUZÉ T, LACAMBRE J B, et al. A New Reliable Boresight Calibration Method for Mobile Laser Scanning Applications[C]//ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-3/W1. Castelldefels: European Calibration and Orientation Workshop, 2014: 67-72. http://adsabs.harvard.edu/abs/2014ISPAr.XL3a..67L |
| [6] |
李杰, 唐秋华, 丁继胜, 等.
船载激光扫描系统在海岛测绘中的应用[J]. 海洋湖沼通报, 2015(3): 108–112.
LI Jie, TANG Qiuhua, DING Jisheng, et al. Application of Shipborne Laser Scanning System in Island Surveying[J]. Transactions of Oceanology and Limnology, 2015(3): 108–112. |
| [7] |
时振伟. 船载激光扫描系统的几个关键问题分析[D]. 青岛: 山东科技大学, 2014. SHI Zhenwei. Analysis of Several Key Problems of Ship-borne Laser Scanning System[D]. Qingdao: Shandong University of Science and Technology, 2014. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2676984 |
| [8] | HABIB A, BANG K I, KERSTING A P, et al. Error Budget of LiDAR Systems and Quality Control of the Derived Data[J]. Photogrammetric Engineering & Remote Sensing, 2009, 75(9): 1093–1108. |
| [9] | FRANCE J I, BUTLER W. Mobile System Angular Alignment Quality Analysis[C]//Proceedings of ASPRS 2012 Annual Conference. Sacramento, California: ASPRS, 2012. |
| [10] | MEZIAN M, VALLET B, SOHEILIAN B, et al. Uncertainty Propagation for Terrestrial Mobile Laser Scanner[C]//Proceedings of ISPRS International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B3. Prague: ISPRS, 2016: 331-335. http://adsabs.harvard.edu/abs/2016ISPAr49B3..331M |
| [11] |
彭彤. 基于船载移动激光扫描的滩涂崩岸测量系统关键技术研究[D]. 抚州: 东华理工大学, 2016. PENG Tong. Research on the Key Technology of Beach Collapse Measurement System of Shipborne Mobile Based on Laser Scanning[D]. Fuzhou: East China University of Technology, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10405-1016758426.htm |
| [12] | CHEOK G S. Proceedings of the LADAR Calibration Facility Workshop[M]. Gaithersburg: NIST, 2003. |
| [13] | SCHULZ T, INGENSAND H. Terrestrial Laser Scanning-Investigations and Applications for High Precision Scanning[C]//Proceedings of the FIG Working Week: The Olympic Spirit in Surveying. Athens, Greece: [s. n. ], 2004. http://www.researchgate.net/publication/237241708_Terrestrial_Laser_Scanning_-_Investigations_and_Applications_for_High_Precision_Scanning |
| [14] | LICHTI D D, FRANKE J. Self-calibration of the iQsun 880 Laser Scanner[R]. Optical 3-D Measurement Techniques Ⅶ. Vienna: [s. n. ], 2005: 112-121. https://www.researchgate.net/publication/290993958_Self-calibration_of_the_iQsun_880_laser_scanner |
| [15] | BARBER D, MILLS J, SMITH-VOYSEY S. Geometric Validation of a Ground-Based Mobile Laser Scanning System[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008, 63(1): 128–141. DOI:10.1016/j.isprsjprs.2007.07.005 |
| [16] |
许晓东, 张小红, 程世来.
机载激光扫描测高系统的安置角误差检校[J]. 黑龙江科技信息, 2010(1): 13.
XU Xiaodong, ZHANG Xiaohong, CHENG Shilai. Boresight Misalignment Calibration of Airborne Laser Scanning System[J]. Heilongjiang Science and Technology Information, 2010(1): 13. |
| [17] |
官云兰, 程效军, 詹新武, 等.
地面三维激光扫描仪系统误差标定[J]. 测绘学报, 2014, 43(7): 731–738.
GUAN Yunlan, CHENG Xiaojun, ZHAN Xinwu, et al. Research on Systematic Errors Calibration of Terrestrial Laser Scanner[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(7): 731–738. DOI:10.13485/j.cnki.11-2089.2014.0101 |
| [18] |
王宝岭. 船载多传感器水上水下综合测量系统检校技术研究[D]. 青岛: 山东科技大学, 2015. WANG Baoling. The Research on Calibration Technology of Shipborne Overwater and Underwater Integrated Surveying System with Multi-sensors[D]. Qingdao: Shandong University of Science and Technology, 2015. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2924835 |
| [19] |
闫利, 刘华, 陈长军, 等.
无地面控制点的车载激光扫描系统外标定方法[J]. 武汉大学学报(信息科学版), 2015, 40(8): 1018–1022.
YAN Li, LIU Hua, CHEN Changjun, et al. A Calibration Method of Mobile Laser System without Control Points[J]. Geomatics and Information Science of Wuhan University, 2015, 40(8): 1018–1022. |
| [20] | LALONDE J F, VANDAPEL N, HUBER D F, et al. Natural Terrain Classification Using Three-dimensional LADAR Data for Ground Robot Mobility[J]. Journal of Field Robotics, 2006, 23(10): 839–861. DOI:10.1002/(ISSN)1556-4967 |
| [21] | YANG Bisheng, DONG Zhen. A Shape-based Segmentation Method for Mobile Laser Scanning Point Clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 81: 19–30. DOI:10.1016/j.isprsjprs.2013.04.002 |
| [22] | YANG Bisheng, ZANG Yufu. Automated Registration of Dense Terrestrial Laser-scanning Point Clouds Using Curves[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 95: 109–121. DOI:10.1016/j.isprsjprs.2014.05.012 |
| [23] |
董震, 杨必胜.
车载激光扫描数据中多类目标的层次化提取方法[J]. 测绘学报, 2015, 44(9): 980–987.
DONG Zhen, YANG Bisheng. Hierarchical Extraction of Multiple Objects from Mobile Laser Scanning Data[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(9): 980–987. DOI:10.11947/j.AGCS.2015.20140339 |
| [24] | YANG Bisheng, DONG Zhen, LIU Yuan, et al. Computing Multiple Aggregation Levels and Contextual Features for Road Facilities Recognition Using Mobile Laser Scanning Data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 126: 180–194. DOI:10.1016/j.isprsjprs.2017.02.014 |
| [25] |
国家测绘局. CH/T 9008. 1-2010基础地理信息数字成果1: 5001: 10001: 2000数字线划图[S]. 北京: 测绘出版社, 2010. National Administration of Surveying, Mapping and Geoinformation. CH/T 9008. 1-2010 Digital Products of Fundamental Geographic Information 1: 5001: 10001: 2000 Digital Line Graphs[S]. Beijing: Surveying and Mapping Press, 2010. |