



2. 首都师范大学北京成像技术高精尖创新中心, 北京 100048;
3. 首都师范大学三维数据获取与应用重点实验室, 北京 100048
2. Beijing Advanced Innovation Center for Imaging Technology, Capital Normal University, Beijing 100048, China;
3. Key Lab of 3D Information Acquisition and Application, Capital Normal University, Beijing 100048, China
随着测绘技术行业的不断发展,人们对快速获取高精度三维地理信息数据的需求越来越迫切,车载激光扫描技术应运而生。它突破了传统的数据采集方式,是一种非接触式主动测量技术,能够快速获取高密度、高精度的地物信息数据,因此能广泛应用于测绘技术领域,如大比例尺城市测图、三维重建、文物保护、建筑物变形监测等[1-5]。
车载激光扫描系统是一套集成激光扫描仪、GPS、IMU和CCD相机等多种传感器为一体的移动测图系统。该系统的GPS获取GPS天线中心在地理空间坐标系下的实时位置信息,IMU得到的是自身的实时姿态信息。激光扫描仪向地物发射激光脉冲,接收地物反射回波,得到地物信息数据,但该数据所表示地物的位置是在激光坐标系下的坐标。要想得到地物在地理空间坐标系下的坐标,需确定激光扫描仪与地理空间坐标系的旋转平移关系。在此过程中,确定激光扫描仪与IMU的位置与姿态关系是关键环节,这个过程称为系统外参数的标定。车载激光扫描系统外参数的标定直接影响试验区数据采集以及后续数据处理的精度和质量,是获取高精度三维地理信息数据的前提和保障[6-8]。
国内外关于车载激光扫描系统外参数标定的研究不断深入,目前的研究成果主要分为两大类:需要检校点的直接标定和不需要检校点的间接标定。其中第1类的研究主要有:①在平坦的试验场中,利用硅电池找到激光扫描线位置,计算出控制点在像方坐标系和物方坐标系之间的转换关系[2];②将罗德里格矩阵应用到相机坐标系和惯导载体坐标系之间的绝对标定[9],基于此,文献[3, 10]将该思想引入到车载激光扫描仪外参数的标定中,求解控制点与激光点之间的关系;③设计检校标志,利用三平面相交得到检校标志中的特征点在激光扫描仪坐标系和全站仪坐标系中的位置,采用平差的方法得到两个坐标系之间的变换关系[11];④借鉴通过俯仰、翻滚、航向角的转换直接计算影像在测图坐标系中外方位角元素的思想,提出车载激光扫描系统瞬时外方位元素标定的方法[12-13];⑤建立标定场,得到控制点在地理空间坐标系和激光坐标系下的坐标,求解两坐标系之间的转换模型,完成激光雷达外参数的标定[14];⑥通过激光扫描时间读取控制点在激光坐标系下的坐标,引入微小转角的概念,修正时间同步误差的标定结果或利用概略值进行系统外方位元素的直接标定[15];⑦通过基于图像的三维建模的方式获取标定物三维信息, 然后解算该三维信息与标定物的测量信息对应关系来完成检校工作[16]。以上这些方法大多需要人工采集检校点或设置特定的检校场地,优点为可直接标定激光扫描仪的外参数,过程相对较简单,但不足之处是很难找到激光坐标系与全站仪坐标下的对应点。第2类是不需要检校点的间接标定方法,目前研究主要有:①基于同名线段对应的激光扫描仪外方位间接检校方法,通过检校标志上的线段在点云和影像中共面关系解算出激光坐标系和全站仪坐标系的平移旋转矩阵,利用相机来完成标定[17];②借鉴ICP算法的思想,文献[18]提出基于立体像对匹配点与激光点云的最近邻迭代配准方法,实现点云与数字图像配准,完成了激光扫描仪与面阵相机之间位置和姿态的标定;文献[19]也利用ICP算法,完成了低空无人机序列影像与激光点云的自动配准,得到相机外方位元素;③利用吊架设备搭载激光扫描仪和摄像机,获取两台设备所采集的三维场景并利用交互方式对场景进行匹配,最终采用最小化约束方程标定出摄像机与激光扫描仪的位置姿态参数[20]。此类方法对检校标志的设计要求较高,容易受到其他因素带来的误差影响,计算量大,过程较复杂。
基于以上分析,本文提出车载激光扫描系统采用不同车行方向获取同一检校区的重复点云数据,通过提取不同角度的平面特征进行自动配准,设立目标函数求取激光扫描仪外参数,完成系统的检校。该方法不需要设置特定的检校场,也不需要采集控制点,且能够实现外参数的自动化标定,提高了检校工作的效率和数据采集的精度。
1 基于平面特征的系统外参数标定方法 1.1 技术路线车载激光扫描系统集成多个传感器,激光扫描仪发射激光脉冲,接收地物反射回波,得到激光坐标系下的点云数据,GPS和IMU将位置和姿态信息实时传递给激光扫描仪,经过坐标转换,得到地理空间坐标系下的点云数据。
车载激光扫描系统重复采集同一区域的点云,其数据结果显示,同名地物并没有完全重合,而是存在一定的偏离。具体来说,是激光坐标系与IMU坐标系没有完全重合[21],它们之间的平移旋转参数的标定就是本文所要解决的问题。若得到高度精确的外参数值(理想情况下),解算出的点云的地理空间坐标是地物的真实坐标,不同车行方向采集的同名地物将会完全重合。现在同名地物之所以存在偏离,是点云数据从激光坐标系向地理空间坐标系转换时,平移旋转参数(3个平移参数,3个旋转参数)存在误差的表现,所以如何高精度快速地标定这6个参数,有效地减小误差是车载激光扫描系统工作的前提和保障。在这里,3个平移参数指的是激光坐标系原点与IMU坐标系原点的偏心矢量,可通过量测获取,而3个旋转参数只能通过计算求取。
本文提出基于平面结构特征的外参数(3个旋转参数)标定方法。选择合适的检校区,在重复采集(不同车行方向采集,如往返行驶)的点云数据中,提取平面特征点云,通过索引(时间或者编码)找到平面点云所对应的原始数据,加入外参数得到地理空间坐标系下的点云,利用提取出的两组点云拟合真实平面,计算这两组点云中的每个点与该平面的距离,解算距离最小时的外参数值,即得到了外参数的最佳值。理论上在一个三维空间中,纠正空间中3个坐标平面(XOY面、XOZ面、YOZ面)即可完成三维空间的配准。基于此,本文进行地面和多个路牌等平面特征结构的提取及校正,从而实现车载激光扫描系统外参数的自动化标定。图 1为车载激光扫描系统外参数标定的工作流程。

|
| 图 1 外参数标定方法流程 Fig. 1 Flow chart of external parameter calibration method |
1.2 系统标定的主要环节 1.2.1 标定平面提取
本文提出的激光扫描系统外参数的标定方法是基于平面结构特征的,所以提取平面是主要工作之一。选择含有不同角度的路牌等平面信息的检校区(如十字路口等),进行车载激光扫描系统的数据采集,得到激光坐标系下的数据。首先解算出点云,对地物进行识别,从中提取平面特征数据。不同车行方向采集的同一地物点云数据在显示中存在不同程度的偏离,由于车载激光扫描系统在检校之前,一般便用设计图纸上得到的安装参数作为初始参数进行解算,误差在一定范围之内,所以偏离程度较小,而平面特征(如不同的路牌)之间的距离远大于同名平面的偏离距离,这为后文涉及的识别同名地物及其编组提供了保证,进而再对其进行配准工作。
下面介绍提取平面的工作,由于地面的点云数据量较大,本文采用随机抽样一致性(RANSAC)算法提取地面平面数据[22-24]。RANSAC算法是一种有效的稳健估计算法[25]。首先将偏差较小的有效数据称为局内点,将偏差较大的无效数据称为局外点。该方法的原理是:假设一个模型,对满足判断条件的尽量少的初始数据,使用一致性数据集去扩大它,如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理,这是一种寻求模型去拟合数据的思想[26]。对于地面提取,本文首先利用点云数据的高程信息,设置合适的阈值,提取出地面点,再利用RANSAC算法拟合出地面点满足的平面方程,得到地面所在平面的点云。
而对于路牌等平面的提取,由于数据量较小,不宜采用RANSAC算法,但该数据的纹理特点是较平坦,杂点较少,结构轮廓明显,与其他地物在空间上存在一定距离,所以较适合采用区域生长[27-28]的方法。该方法较简单,计算速度较快[29]。首先选取一部分点,作为初始点集,将这些种子点作为区域生长的起点,确定生长准则,然后将种子点周围邻域中与种子有相同或相似性质的点合并到种子点所在的区域中,而新的种子点继续向四周生长,直到再没有满足条件的点可以容纳进来,就完成了一个区域的生长。具体操作为人工选取平面内的一部分点,将这些点作为种子点,设置规则:计算种子点与邻域点的距离,小于阈值的邻域点作为新的种子点,继续迭代,直到没有新的点满足条件,就完成了一个路牌平面的提取。
为了增加平面提取的准确度,本文在区域生长的方法之后,考虑到路牌等小平面上每一个点的法向量几乎平行的特点,又计算了每个点的法向量[30],并设置合适的参数(法向量夹角在一定范围内)。若相邻点的法向量夹角过大,那么可以确定噪点的存在,排除噪点,以及z轴坐标为零等规则来精确提取平面特征数据。采用以上方法从车载激光扫描系统不同车行方向采集的同一区域点云中提取地面及多个不同角度的路牌等平面。通过索引找到对应的激光坐标系下的这些平面点云,输入到转换模型中。具体操作为:在对点云解算之前,为每一个点编码(1, 2, 3, 4, 5, …),写入数据中,数据属性:编码,X、Y、Z,时间等。由于解算之后才能在可视化界面呈现地物信息,所以首先无参数值解算出能够可视化的点云,以便提取平面。提取之后,由于要找到平面点云的原始数据,加入待求的外参数进行下一步的配准、自动求解,所以可通过所提取平面数据点云的编码,找到原始点云,将这些解算之后是平面特征的原始点云输入到下一步建立的转换模型中。
1.2.2 建立转换模型首先介绍车载激光扫描系统涉及的几种坐标系的定义:
(1) 地理空间坐标系:WGS-84高斯克吕格3°带投影坐标系。
(2) 激光扫描仪坐标系:以激光扫描仪的激光发射中心为坐标原点,X轴为移动平台的运动方向,Z轴为激光扫描仪中心与发射孔中心所在的轴,与Y轴共同构成右手坐标系。如图 2所示。

|
| 图 2 激光扫描仪坐标系 Fig. 2 The coordinate system of the laser scanner |
(3) 惯导坐标系:坐标原点为GPS天线相位中心,竖直向上为Z轴,车行方向为Y轴,与X轴成右手坐标系。
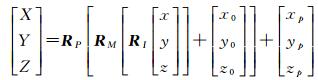
建立转换模型,使得点云从激光坐标系转换到地理空间坐标系下,在车载激光扫描系统工作时,GPS和IMU向激光扫描仪实时传递位置和姿态信息。首先定义原始激光点云坐标为(x y z)T,统一到IMU坐标系下,经过激光坐标系与IMU坐标系坐标轴夹角的旋转矩阵变换,加上激光坐标系原点到IMU坐标系原点的位置偏移量,再经过POS系统中姿态角的旋转变换,最后加入IMU中心在地理空间坐标系下的坐标的修正,得到地理空间坐标系下的点云坐标(X Y Z)T,完成了从激光坐标系到地理空间坐标系的转换[2]。具体模型如下
 (1)
(1)
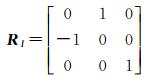
式中,[x y z]T为原始激光坐标系下的点云坐标;[X Y Z]T为地理空间坐标系下的点云坐标;[x0 y0 z0]T为激光坐标系原点到IMU坐标系原点的位置偏移量;[xp yp zp]T为IMU中心在地理空间坐标系下的坐标;旋转矩阵RI,见式(2)
 (2)
(2)
将激光坐标系下的点云坐标变换到IMU坐标系下。转换后的点云坐标为[-y x z]T。
旋转矩阵RM表示激光坐标系的3个坐标轴与IMU坐标系的3个坐标轴之间的旋转变换关系。先将激光坐标系的坐标轴绕X轴逆时针旋转Ω,再将坐标轴绕新的Y轴逆时针旋转Φ,最后将坐标轴绕新的Z轴逆时针旋转Κ,将3次得到的旋转矩阵合并即得到旋转矩阵RM(文献[2])。具体见式(3)
 (3)
(3)
式中,Ω、Φ、Κ为激光扫描仪与IMU之间的3个姿态角,这3个旋转参数即为本文方法所要优化的3个参数。
RP为POS文件中记录的IMU的3个姿态角构成的旋转矩阵。先将IMU坐标系的坐标轴绕Y轴逆时针旋转α,再将坐标轴绕新的X轴逆时针旋转β,最后将坐标轴绕新的Z轴逆时针旋转γ(文献[2])。具体见式(4)
 (4)
(4)
式中,α、β、γ分别为IMU所测得的翻滚角、俯仰角、航向角。
1.2.3 平面特征配准及外参数求解通过所建立的转换模型的解算,得到地理空间坐标系下路牌的点云数据。预先设定车载激光雷达系统往返两次采集同一区域的点云数据,记为第A组和第B组,分别提取A、B组点云中的地面和路牌等数据。由于不同的路牌存在一定的距离d,而重复采集的同一路牌的偏差距离远远小于d,为同名路牌的编组的正确性提供了保障。在可视化界面中人工对同名平面特征编组。对每组的同名平面做配准,纠正同名平面存在的偏差,将其纠正到同一位置。以其中一个路牌点云数据为例,路牌记为A1和B1。以下详细介绍配准及外参数求解过程。
坐标转换过程中,由于外参数存在误差,使得A1和B1两个同名路牌不能完全重合。对A1和B1点云数据采用最小二乘方法拟合平面,确定平面方程为ax+by+cz-d=0,将两组平面点云(假设两组数据共n个点,i=1, 2, 3, …, n)中的每个点[Xi Yi Zi]T代入平面方程中,由于该平面方程是通过点云来拟合的,所以[Xi Yi Zi]T并不能完全满足该平面方程。计算每个点与平面的距离Di
 (5)
(5)
A1和B1中每一个点的地理空间坐标都是由含有6个待求的外参数的式子表示的,所以外参数不断变化的情况下,拟合的平面是不断变化的,每个点到平面的距离也是不断变化的。以其中一个路牌平面(A1和B1)的检校为例,当这个距离平方和趋近于0的情况下,那么A1和B1上所有的点无限趋近于所拟合平面,那么A1和B1所表示的两个路牌平面就无限趋近于重合,这就完成了一组平面的配准。但是此时无法保证同名路牌的边界重合,所以不能仅仅进行一对路牌平面(A1和B1)的检校,要完成地面平面和多个路牌平面(如A2与B2,A3与B3,A4与B4等)的同时配准,而且要求提取的不同平面之间要存在不同的角度。因此目标函数为所有相匹配的同名平面中所求得的每个点到拟合的对应平面的距离平方总和最小,实现不同角度平面的同时配准,从而完成整个三维空间的校准。
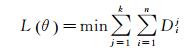
假设所提取的路牌等平面名称为j,j=1, 2, 3, …, k,共k个,每组计算的点到拟合平面的距离之和为
 (6)
(6)
式中

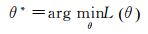
求得L(θ)最小时的3个外参数值,即求解
 (7)
(7)
本文采用梯度下降搜索的方法[31-32]来进行外参数的解算。该方法可用于建模和解决复杂的非线性最小二乘问题,在实际工程问题中,采用基于该原理的Ceres工具进行解算。输入本文研究的目标函数、参数与初始值,设置合适的步长进行迭代,得出最佳的外参数值。该方法不需要对非线性的方程进行求偏导数进行线性化然后再使用最小二乘求解系数,而且具有求解速度快的特点。
2 试验及分析 2.1 设备与数据本文试验采用的是车载激光扫描系统,组成部分有激光扫描仪、GPS天线、惯性组合导航(IMU)、CCD相机等,设备集成外观如图 3所示,硬件参数介绍见表 1。

|
| 图 3 车载激光扫描系统 Fig. 3 Vehicle laser scanning system |
| 硬件 | 型号 | 性能参数 |
| 激光扫描仪 | VUX-1 | 激光器类型:脉冲式 扫描视场角:0°~330° 最大射程920m |
| GPSIMU系统 | G5Ant-42AT1国产 | 差分后姿态精度:0.002° 差分后航向精度:0.005° 数据存储空间:8~32G |
| 相机 | Ladybug5 | 成像模块:6台CCD及低畸变镜头 分辨率:2448×2048 |
本文使用该车载激光扫描系统采集的北京市亦庄泰和路与博兴路交叉口附近路段检校数据。对该数据进行编码以及无检校参数解算,显示该检校区位于十字路口,主要地物有树木、路灯和路牌等如图 4所示,图 5为部分路牌细节显示效果。

|
| 图 4 检校区数据高程渲染 Fig. 4 Elevation color of the data in the test area |

|
| 图 5 检校区数据路牌细节 Fig. 5 Road signs details of the data in the test area |
2.2 试验与验证
对于地面所在平面数据的提取,本试验采用RANSAC算法;对于路牌等平面特征数据的提取,首先采用区域生长,计算点与邻域点的距离,设置阈值为(0~0.06m),提取平面点云,然后计算这些点云的法向量,设置法向量夹角阈值为(0°~5°),与地面平行和法向量Z轴坐标为零等规则的聚类方法完成平面特征的精细化提取,方法原理参照1.2.1节。此次试验提取了15组同名平面(包括地面),进行15组平面配准的外参数标定,路牌、隔离墙等平面之间存在不同大小的夹角,且与地面存在垂直关系,用这些平面来完成两次采集的重叠点云在三维空间上的检校。地面提取结果如图 6所示,路牌、隔离墙等平面的提取结果如图 7所示。

|
| 图 6 地面提取结果 Fig. 6 Ground extraction results |

|
| 图 7 路牌等平面提取结果 Fig. 7 Road signs and other plane extraction results |
对不同车行方向采集的同一区域的点云均进行地面平面数据和路牌等平面数据的提取及同名地物的编组和配准。首先通过编码找到原始激光坐标系下的平面特征点云,经过坐标转换,得到这些数据的带有外参数的地理空间坐标;按照1.2.3节的方法与步骤,以求取每个点与对应拟合平面的距离平方总和最小为目标函数;采用Ceres的方法解决该非线性组合优化问题,求解出最佳的外参数值。试验之前测量了该激光扫描系统中激光扫描仪与IMU之间的偏心矢量,即3个平移参数x0、y0、z0。具体方法是:激光扫描仪、GPS天线、IMU、CCD相机是经过加工后固定在设备平台上的,根据测试加工的工装图,从图纸上量测激光扫描仪与IMU坐标系的原点的相对位置参数。由于这种测量方式精确度较高,所以采用此方法进行两个坐标系原点的相对位置(3个平移参数)的标定;利用本文方法进行两个坐标系坐标轴的相对姿态(3个旋转参数)的标定。6个外参数的求解结果如表 2所示。
| x0 | y0 | z0 | Ω | Φ | Κ |
| -0.005 | -0.015 | 0.297 | -0.172 | 0.387 | 0.348 |
表 2中x0、y0、z0的单位为米(m),Ω、Φ、Κ的单位为度(°)。通过得到的外参数对检校数据进行解算,比较检校前后不同车行方向采集的同一区域地物的重叠情况,通过对比得出:由本文方法标定出的激光外参数值对同名地物实现了较好的配准。如图 8所示,其中(a1)-(h1)、(a2)-(h2)分别为检校前、后同名地物的情况。

|
| 图 8 检校前后同名地物重叠情况 Fig. 8 The features with the same name overlap with each other before and after correction |
为验证本文方法的有效性,采用此套设备采集了北京市亦庄的部分路段的数据,试验区数据如图 9所示。

|
| 图 9 试验区数据高程渲染 Fig. 9 Elevation color of the data in the test area |
使用本文方法所得激光外参数值对该数据进行解算,测试试验区数据精度。采用RTK(real-time kinematic)测量仪器人工采集检校点,这也是目前通用的地物三维坐标采集方式。在本试验验证环节中共量测了该区域28个点的三维坐标,作为检校点。部分检校点数据如表 3所示。
| m | ||
| X | Y | Z |
| 457634.146113 | 4402928.442658 | 21.426000 |
| 457633.753021 | 4402928.573426 | 21.535000 |
| 457631.503014 | 4402924.621605 | 21.539000 |
| 457631.170112 | 4402924.691432 | 21.449000 |
| 457633.100135 | 4402928.713463 | 21.447000 |
| 457632.760146 | 4402928.882646 | 21.513000 |
| 457630.441287 | 4402924.882548 | 21.379000 |
| 457630.131547 | 4402925.034365 | 21.372000 |
| 457632.073335 | 4402929.082578 | 21.527000 |
| 457631.724285 | 4402929.234726 | 21.417000 |
利用以上检校点,对未加入外参数解算的点云数据计算残差,做精度分析,表 4所示为部分结果。对加入外参数解算的点云同样做残差计算,表 5所示为部分结果。
| m | ||
| ΔX | ΔY | ΔZ |
| 0.016113 | 0.042658 | 0.166000 |
| -0.016979 | 0.053426 | 0.275000 |
| -0.046986 | 0.111605 | 0.279000 |
| 0.050112 | 0.041432 | 0.199000 |
| -0.019865 | -0.011537 | 0.187000 |
| -0.039854 | 0.062646 | 0.253000 |
| -0.088713 | 0.062548 | 0.139000 |
| 0.001547 | 0.094365 | 0.142000 |
| -0.036665 | 0.072578 | 0.267000 |
| -0.045715 | 0.114726 | 0.157000 |
| m | ||
| ΔX | ΔY | ΔZ |
| 0.006113 | 0.012658 | -0.094000 |
| -0.006979 | 0.003426 | 0.015000 |
| 0.003014 | 0.021605 | 0.019000 |
| 0.010112 | 0.001432 | -0.061000 |
| -0.009865 | -0.006537 | -0.063000 |
| -0.019854 | 0.012646 | 0.003000 |
| -0.008713 | 0.012548 | -0.101000 |
| 0.041547 | 0.014365 | -0.098000 |
| -0.016665 | 0.012578 | 0.017000 |
| -0.015715 | 0.034726 | -0.083000 |
检校点对加入外参数前后的数据分别进行了中误差的计算,3个坐标值的中误差见表 6、表 7。X的中误差由0.046m减小至0.021m,Y的中误差由0.063m减小至0.014m,Z的中误差由0.206m减小至0.067m。该结果显示利用本文方法所得外参数校正后的点云数据的精度更高。
| m | ||
| dX | dY | dZ |
| 0.046388 | 0.063290 | 0.206498 |
| m | ||
| dX | dY | dZ |
| 0.021486 | 0.013990 | 0.067038 |
3 结论与讨论
本文提出了基于平面特征的车载激光扫描系统外参数标定方法设计试验方案,选择含有不同角度路牌、隔离墙等平面地物的检校区域,对该方法进行了试验和验证。从不同车行方向采集到的同一区域点云中提取平面特征数据,通过同名地物(平面特征)自动化配准完成车载激光扫描系统外参数的标定。其精度结果显示,采用本文所提出的方法得到的外参数对车载激光扫描系统采集的数据进行检校,与没有加入外参数的解算结果相比,提高了数据的精度,为三维地理信息数据的采集提供了质量和精度的保障。
本文方法无需人工设置特定的检校场,只需选择带有多个不同角度的路牌等平面地物的检校区,如十字路口等,节省人力物力且适用性较强。对于不同检校区,如果平面特征地物形态差别较大,需重新设置合适的参数进行提取。本文方法能够实现车载激光扫描系统外参数的自动化标定,提高数据采集的精度和质量。
| [1] |
杨必胜, 梁福逊, 黄荣刚.
三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10): 1509–1516.
YANG Bisheng, LIANG Fuxun, HUANG Ronggang. Progress, Challenges and Perspectives of 3D LiDAR Point Cloud Processing[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1509–1516. DOI:10.11947/j.AGCS.2017.20170351 |
| [2] |
康永伟, 钟若飞, 吴俣.
车载激光扫描仪外参数标定方法研究[J]. 红外与激光工程, 2008, 37(S3): 254–258.
KANG Yongwei, ZHONG Ruofei, WU Yu. Research of Calibrating Vehicle Laser Scanner's External Parameters[J]. Infrared and Laser Engineering, 2008, 37(S3): 254–258. |
| [3] |
聂倩, 陈为民, 陈长军.
车载三维激光扫描系统的外参数标定研究[J]. 测绘通报, 2013(11): 74–77.
NIE Qian, CHEN Weimin, CHEN Changjun. Research on Absolute Calibration for Vehicle-borne 3D Laser Imaging System[J]. Bulletin of Surveying and Mapping, 2013(11): 74–77. |
| [4] |
高志国.地面三维激光扫描数据处理及建模研究[D].西安: 长安大学, 2010. GAO Zhiguo. The Research of Terrestrial Laser Scanning Data Processing and Modeling[D]. Xi'an: Chang'an University, 2010. http://cdmd.cnki.com.cn/Article/CDMD-11941-2010221604.htm |
| [5] |
周华伟.地面三维激光扫描点云数据处理与模型构建[D].昆明: 昆明理工大学, 2011. ZHOU Huawei. Data Processing and Model Construction of Ground 3D Laser Scanning Point Cloud[D]. Kunming: Kunming University of Science and Technology, 2011. |
| [6] | GLENNIE C, LICHTI D D. Static Calibration and Analysis of the Velodyne HDL-64E S2 for High Accuracy Mobile Scanning[J]. Remote Sensing, 2010, 2(6): 1610–1624. DOI:10.3390/rs2061610 |
| [7] |
徐景中, 寇媛, 袁芳, 等.
基于结构特征的机载LiDAR数据与航空影像自动配准[J]. 红外与激光工程, 2013, 42(12): 3502–3508.
XU Jingzhong, KOU Yuan, YUAN Fang, et al. Auto-registration of Aerial Imagery and Airborne LiDAR Data Based on Structure Feature[J]. Infrared and Laser Engineering, 2013, 42(12): 3502–3508. DOI:10.3969/j.issn.1007-2276.2013.12.061 |
| [8] |
姚连璧, 汪志飞, 孙海丽.
车载激光扫描仪外参数标定方法设计与实现[J]. 同济大学学报(自然科学版), 2016, 44(1): 161–166.
YAO Lianbi, WANG Zhifei, SUN Haili. Design and Implementation of Vehicle Laser Scanner's External Parameter Calibration[J]. Journal of Tongji University (Natural Science), 2016, 44(1): 161–166. |
| [9] |
张钧, 柳健, 刘小茂.
利用罗德里格矩阵确定三维表面重建中的绝对定向模型[J]. 红外与激光工程, 1998, 27(4): 30–32.
ZHANG Jun, LIU Jian, LIU Xiaomao. Three Dimensional Absolute Orientation Model Using the Roderick Matrix[J]. Infrared and Laser Engineering, 1998, 27(4): 30–32. |
| [10] |
张卡, 盛业华, 叶春, 等.
车载三维数据采集系统的绝对标定及精度分析[J]. 武汉大学学报(信息科学版), 2008, 33(1): 55–59.
ZHANG Ka, SHENG Yehua, YE Chun, et al. Absolute Calibration and Precision Analysis for Vehicle-borne 3D Data Acquiring System Integrated with GPS, INS and CCD-camera[J]. Geomatics and Information Science of Wuhan University, 2008, 33(1): 55–59. |
| [11] |
杨长强, 叶泽田.
一种基于点对应的激光扫描仪外方位参数检校方法[J]. 测绘科学, 2011, 36(5): 190–192.
YANG Changqiang, YE Zetian. A Calibration Method for Laser Scanner's External Orientation by Corresponding Points[J]. Science of Surveying and Mapping, 2011, 36(5): 190–192. |
| [12] | ZHAO Haitao, ZHANG Bing, WU Changshan, et al. Development of a Coordinate Transformation Method for Direct Georeferencing in Map Projection Frames[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013(77): 94–103. |
| [13] |
李晓红.
车载移动激光扫描测量瞬时外方位元素精确直接解算方法[J]. 测绘通报, 2014(10): 70–73.
LI Xiaohong. Direct Determination of Instant Exterior Orientation Parameters for Mobile Terrestrial Laser Scanning System[J]. Bulletin of Surveying and Mapping, 2014(10): 70–73. DOI:10.13474/j.cnki.11-2246.2014.0332 |
| [14] |
汪帆, 何文峰, 林昀.
车载激光扫描测量系统外标定方法的研究和实现[J]. 城市勘测, 2014(2): 103–107.
WANG Fan, HE Wenfeng, LIN Yun. Calibration Methodology and Realization of Mobile Laser System[J]. Urban Geotechnical Investigation & Surveying, 2014(2): 103–107. DOI:10.3969/j.issn.1672-8262.2014.02.028 |
| [15] |
叶泽田, 杨勇, 赵文吉, 等.
车载GPS/IMU/LS激光成像系统外方位元素的动态标定[J]. 测绘学报, 2011, 40(3): 345–350.
YE Zetian, YANG Yong, ZHAO Wenji, et al. Dynamic Calibration of Exterior Orientations for Vehicle GPS/IMU/LS Laser Imaging System[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(3): 345–350. |
| [16] | ZHANG Qilong, PLESS R. Extrinsic Calibration of a Camera and Laser Range Finder (Improves Camera Calibration)[C]//Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems. Sendai, Japan: IEEE, 2003(3): 2301-2306. |
| [17] |
杨长强.激光扫描仪检校及车载激光点云的分类与矢量化研究[D].青岛: 山东科技大学, 2010. YANG Changqiang. Study of Laser Scanner Calibration and Vehicle-borne Laser Point Cloud Classification & Vectorization[D]. Qingdao: Shandong University of Science and Technology, 2010. http://cdmd.cnki.com.cn/article/cdmd-10424-1010120913.htm |
| [18] |
邓非, 张祖勋, 张剑清.
一种激光扫描数据与数码照片的配准方法[J]. 武汉大学学报(信息科学版), 2007, 32(4): 290–292, 296.
DENG Fei, ZHANG Zuxun, ZHANG Jianqing. A Method of Registration Between Laser Scanning Data and Digital Images[J]. Geomatics and Information Science of Wuhan University, 2007, 32(4): 290–292, 296. |
| [19] |
陈驰, 杨必胜, 彭向阳.
低空UAV激光点云和序列影像的自动配准方法[J]. 测绘学报, 2015, 44(5): 518–525.
CHEN Chi, YANG Bisheng, PENG Xiangyang. Automatic Registration of Low Altitude UAV Sequent Images and Laser Point Clouds[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(5): 518–525. DOI:10.11947/j.AGCS.2015.20130558 |
| [20] | BAUERMANN I, STEINBACH E. Joint Calibration of a Range and Visual Sensor for the Acquisition of RGBZ Concentric Mosaics[C]//Vision Modeling and Visualization 2005. Erlangen, Germany: [s.n.], 2005. |
| [21] |
曲来超.基于车载测量系统的激光扫描仪检校研究与应用[D].焦作: 河南理工大学, 2009. QU Laichao. The Research and Application of Laser Scanner Based on Vehicle Measurement[D]. Jiaozuo: Henan University of Science and Technology, 2009. http://cdmd.cnki.com.cn/Article/CDMD-10460-2010281462.htm |
| [22] | FISCHLER M A, BOLLES R C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[M]//FISCHLER M A, FIRSCHEIN O. Readings in Computer Vision. Amsterdam: Elsevier, 1987: 726-740. |
| [23] |
李宝, 程志全, 党岗, 等.
一种基于RANSAC的点云特征线提取算法[J]. 计算机工程与科学, 2013, 35(2): 147–153.
LI Bao, CHENG Zhiquan, DANG Gang, et al. A RANSAC-based Line Features Detection Algorithm For Point Clouds[J]. Computer Engineering & Science, 2013, 35(2): 147–153. DOI:10.3969/j.issn.1007-130X.2013.02.026 |
| [24] |
程金龙, 冯莹, 曹毓, 等.
车载激光雷达外参数的标定方法[J]. 光电工程, 2013, 40(12): 89–94.
CHNEG Jinlong, FENG Ying, CAO Yu, et al. Extrinsic Calibration Method for Multiple LiDARs Mounted on Mobile Vehicle[J]. Opto-Electronic Engineering, 2013, 40(12): 89–94. DOI:10.3969/j.issn.1003-501X.2013.12.015 |
| [25] |
李孟迪, 蒋胜平, 王红平.
基于随机抽样一致性算法的稳健点云平面拟合方法[J]. 测绘科学, 2015, 40(1): 102–106.
LI Mengdi, JIANG Shengping, WANG Hongping. A RANSAC-based Stable Plane Fitting Method of Point Clouds[J]. Science of Surveying and Mapping, 2015, 40(1): 102–106. |
| [26] |
周春霖, 朱合华, 李晓军.
随机抽样一致性平面拟合及其应用研究[J]. 计算机工程与应用, 2011, 47(7): 177–179.
ZHOU Chunlin, ZHU Hehua, LI Xiaojun. Research and Application of Robust Plane Fitting Algorithm with RANSAC[J]. Computer Engineering and Applications, 2011, 47(7): 177–179. DOI:10.3778/j.issn.1002-8331.2011.07.051 |
| [27] | SATO M, LAKARE S, WAN Ming, et al. A Gradient Magnitude Based Region Growing Algorithm for Accurate Segmentation[C]//Proceedings 2000 International Conference on Image Processing. Vancouver, BC, Canada: IEEE, 2000(3): 448-451. |
| [28] | LU Yingli, JIANG Tianzi, ZANG Yufeng. Region Growing Method for the Analysis of Functional MRI Data[J]. NeuroImage, 2003, 20(1): 455–465. DOI:10.1016/S1053-8119(03)00352-5 |
| [29] |
徐蔚波, 刘颖, 章浩伟.
基于区域生长的图像分割研究进展[J]. 北京生物医学工程, 2017, 36(3): 317–322.
XU Weibo, LIU Ying, ZHANG Haowei. Research Progress in Image Segmentation Based on Region Growing[J]. Beijing Biomedical Engineering, 2017, 36(3): 317–322. DOI:10.3969/j.issn.1002-3208.2017.03.16. |
| [30] |
李宝顺, 岑红燕, 包亚萍, 等.
基于平面提取的点云数据分割算法[J]. 计算机应用与软件, 2014, 31(7): 145–148.
LI Baoshun, CEN Hongyan, BAO Yaping, et al. Segmentation Algorithm for Point Cloud Data Based on Plane Extraction[J]. Computer Applications and Software, 2014, 31(7): 145–148. DOI:10.3969/j.issn.1000-386x.2014.07.037 |
| [31] | VAPNIK V N. Statistical Learning Theory[M]. New York: Wiley, 1998. |
| [32] |
汪宝彬, 汪玉霞.
随机梯度下降法的一些性质[J]. 数学杂志, 2011, 31(6): 1041–1044.
WANG Baobin, WANG Yuxia. Some Properties Relating to Stochastic Gradient Descent Methods[J]. Journal of Mathematics, 2011, 31(6): 1041–1044. |