


在现代大地测量动态数据处理中,只要观测值数量大于未知参数个数,即可建立数学模型并采用逐点单历元的平差方法求得所需的动态解[1-2]。数学模型包括函数模型和随机模型两部分,前者表征的是观测值和未知参数之间的关系,而后者描述的是观测值的精度以及相互之间的关系,两者同等重要且缺一不可[3-4]。
通常,可以认为观测误差为高斯白噪声,即假设观测值之间不存在时间相关性。然而在实际观测数据中,由于非模型化误差的存在[5-6],导致观测值中往往包含具有时间相关性的有色噪声,从而影响了已建立数学模型的正确性[7-10]。事实上,在实际应用中如忽略观测值时间相关性往往会得到不可靠的参数解及其精度[11-13]。文献[14]详细分析了忽略观测值时间相关性得到的参数解精度往往过于乐观且不符合实际。文献[15]指出观测值时间相关性将引起GPS长基线定位结果差异达2cm,在高精度定位领域如变形监测中不可忽略。文献[16]研究了顾及时间相关性可以获得符合实际的最小可探测粗差,从而帮助用户在质量控制应用中得到更正确的结果。此外,在GNSS应用中,文献[17]证明了当考虑观测值时间相关性时,可以提高模糊度固定的成功率,在单频观测值中尤其明显。
然而,在动态数据处理中,顾及观测值时间相关性的平差方法虽然得到了一定程度的研究[1, 18-19],尤其是在GNSS导航领域[20-22],但在统一性和实用性两个问题上尚未完全解决。首先,当前应用最为普遍的是通过时间差分变换方式,将原始相关观测值变换为独立观测值,从而达到消除观测值时间相关性的目的[18, 20, 23]。事实上,类似的还有去相关变换法,如利用LDLT分解对观测值的方差-协方差阵进行变换[15]。遗憾的是,这些方法的特点以及相互之间的关系目前并没有得到详细论证,因此容易让人产生困惑,造成混乱。其次,由于时间相关观测的动态数据处理中的方差-协方差矩阵不再是一个分块对角矩阵,单历元或者法方程叠加的方法不再适用,直接求逆又会引起巨大的计算量[24],有色噪声模型往往又很难实时准确地获取[25-27],因此在实际应用时,需要有简化的方法在能够保证解算效率的同时又能有效顾及时间相关性。
因此,本文将深入研究几种时间相关观测的动态数据处理方法。首先,对时间相关观测的动态数据处理方法进行了扩展和统一。利用极大验后(MAP)估计原理,提出了顾及观测值时间相关性动态解的第3种思路,并针对无历元公用参数和有历元公用参数两类应用情景,详细推导了去相关变换法、差分变换法和MAP估计法这3种顾及时间相关性的动态解的解析公式,并重点探讨了它们的适用范围以及等价性。其次,导出了一种实用的时间相关观测的动态数据处理方法,即针对严格考虑时间相关性会导致计算复杂且效率低的客观问题,采用自相关函数(ACF)实时估计时间相关性,从而发展了一种简化且能有效表征观测值时间相关性影响的退化形式。最后,采用双频GPS试验数据,对本文理论进行了验证。
1 无历元公用参数的时间相关观测模型首先探讨无历元公用参数的时间相关观测模型,例如采用GNSS伪距或者模糊度固定后的载波相位进行动态定位。设连续K个历元观测值时间相关,对应的观测方程及其方差-协方差阵为
 (1a)
(1a)
 (1b)
(1b)
式中,y=[y1T, y2T, …, yKT]T;A=blkdiag(A1, A2, …, AK);x=[x1T, x2T, …, xKT]T;ε=[ε1T, ε2T, …, εKT]T。当历元间观测值相互独立时,即Qyiyj=0(i≠j),可采用单历元观测值单独平差的方法进行求解;而当历元间观测值时间相关时,即Qyiyj≠0,需要联立多历元观测值联合平差的方法进行求解。本文将分别采用去相关变换法、差分变换法和MAP估计法推导时间相关观测的动态数据处理解法,并着重论证它们的等价性。
1.1 去相关变换法利用LDLT分解法对方差-协方差阵Qyy进行变换,令分解形式为Qyy=UDUT,其中,U为单位下三角矩阵,对应的递归公式为[28]
 (2)
(2)
式中,Uij表示单位下三角矩阵的第i行第j列子矩阵;D=blkdiag(D1, D2, …, DK)为分块对角矩阵。令LQyyLT=D,则
 (3)
(3)
去相关变换法的基本思想是,通过对相关观测值改造,得到一组新的独立观测量。具体的,对观测方程式(1a)左乘矩阵L,得到新的观测方程
 (4a)
(4a)
式中,




 (4b)
(4b)
式中,


 (5)
(5)
式中,


 (6)
(6)
式中,


 (7)
(7)
式中,


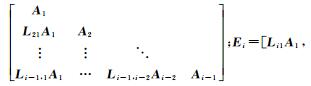
将观测方程式(1a)按前i-1个历元和第i个历元分块表达,则前i-1个历元的观测方程为
 (8)
(8)
式中,

 (9)
(9)
式中,
将第i个历元观测值改造为
 (10)
(10)
式中,
 (11)
(11)
显然,当

 (12)
(12)
式中,
 (13)
(13)
式中,


 (14)
(14)
式中,


与去相关变换法比较,可以证明

MAP估计理论的本质是用观测值y对参数先验信息


 (15)
(15)
式中,E为期望算子。根据MAP理论,当随机变量


 (16)
(16)
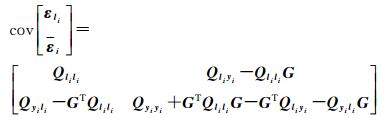
式中,带下划线的变量


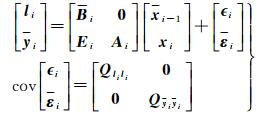
本节采用MAP估计推导时间相关观测的动态解,利用差分变换法中的分块观测方程,按照MAP标准形式进行变量对应,即

 (17a)
(17a)
 (17b)
(17b)
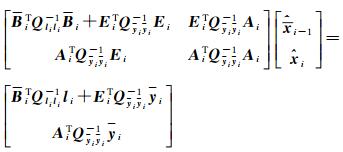
式(17a)的含义不难理解,由于观测值li与yi相关,当已知li的估值


 (18)
(18)
由于上文已证明了去相关变换法与差分变换法等价,这里只证明MAP法的动态解方程式(18)与差分变换法方程式(14)等价。可导出

 (19)
(19)
顾及差分变换法中

 (20)
(20)
此外,由式(17a)得

 (21)
(21)
将式(20)和式(21)代入式(18)得式(14),即证明了MAP法与差分变换法的动态解是等价的。类似的,MAP估计法不需要前后历元的观测值类型和维数相同,而差分变换法则需要。
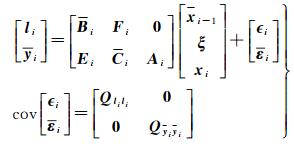
2 有历元公用参数的时间相关观测模型在某些应用场景下,历元间往往存在公用参数,例如,在GNSS长基线精密定位中,除了随历元变化的位置参数外,还含有未固定的模糊度参数和天顶对流层参数。此时,即使历元间观测值相互独立时,也不能再用单历元观测值单独平差的方法,而需要多个历元联合进行平差。但传统的多历元平差方法因其需要不同历元的观测值,容易引起解算效率低的问题。因此,为了能够保证解算结果不变的情况下,尽最大可能地提高解算效率,本节将探讨有历元公用参数的时间相关观测模型的动态数据处理方法。设连续K个历元的观测值存在时间相关,除了随历元变化的参数x外,历元间还存在公用参数ξ,则K个历元的观测方程为
 (22)
(22)
式中,C=[C1T, C2T, …, CKT]T,对应的方差-协方差阵形式与式(1b)相同。由于上节已证明了去相关变换法、差分变换法和MAP估计法的等价性,本文利用去相关变换法进行推导。
对观测方程式(22)左乘矩阵L,得到类似于式(4a)的去相关后的观测方程
 (23)
(23)
式中,
 (24)
(24)
式中,

 (25)
(25)
式中,将式(25)与式(24)的第2个方程进行最小二乘准则下融合,得法方程
 (26)
(26)
式中,


采用最小二乘法方程约化且根据矩阵反演公式,推导得到第i个历元的参数最小二乘估值为
 (27)
(27)
式中,
虽然上述解算公式严密准确,但涉及大量的矩阵运算,计算复杂且效率低。折中的方法是采用尽量简洁且能有效刻画时间相关性的协方差函数,从而在满足计算效率的同时能符合实际时间相关误差特征。假设各历元观测值的方差-协方差阵相同,利用ACF估计该时间相关系数,且相邻历元的时间相关系数为ρ,则原始方差-协方差阵为
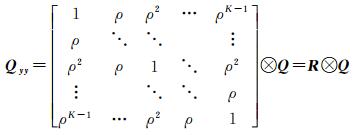 (28)
(28)
式中,符号“⊗”代表克罗内克积,即满足A⊗B= 
以观测方程式(1a)为例,利用去相关变换法进行推导。具体的,对观测方程式(1a)左乘矩阵L⊗I。对应去相关后的观测方程式(4a)中的变量为



 (29)
(29)
式中,





为验证上述理论公式推导的正确性和实用性,选取了同一测区同一时间段内的两条基线长度分别为11.4和42.5km的双频相位GPS数据,分别命名为No.1和No.2。采样间隔为1s,时间长度为1h,模糊度已事先固定。首先利用传统的单历元单独平差方法,获得定位结果,并采用ACF计算观测值残差的时间相关性,通过得到的时间相关系数可以判断相应观测值是否存在时间相关性。图 1是两条基线的双频相位观测值时间相关系数,其中每条曲线代表一个双差卫星对。显然,对于这两条基线,时间相关性在一段时间内都是显著存在的。因此,采用顾及观测值时间相关性的动态数据处理方法是必要的。

|
| 图 1 GPS观测值时间相关系数 Fig. 1 Time correlation coefficients of GPS observations |
为分析观测值时间相关性的影响因素,统计了这两条基线所有双频相位观测值时间相关性小于0.3以及接近0时的平均时间间隔,这里0.3和0分别认为时间相关性不显著以及不存在。计算可得,当基线长度为11.4km时,观测值时间相关性不显著以及不存在的时间间隔平均为86和181s;而当基线长度变为42.5km时,相应时间间隔平均为220和396s。即在200~400s之后,观测值时间相关性才可以完全忽略。事实上,之所以不同基线长度的观测值可以忽略时间相关性的时间间隔不同,是由于上述时间相关性主要是因为观测值中存在一些难以通过经验模型改正及参数化吸收等的非模型化误差所引起的[5-6, 30]。显然,当基线长度越长,所受到的大气误差越严重,因而非模型化误差也越严重,即造成了观测值时间相关性也越强的现象。
接着,采用上述时间相关观测模型中的3种方法分别进行计算,即A、B和C分别表示去相关变换法、差分变换法和MAP估计法。统计了利用这些方法对No.1和No.2这两条基线进行解算后的定位误差的均值和标准差,可以发现这3种方法的定位误差都在厘米级,且他们的定位结果等价,具体统计结果如表 1所示。因此,验证了本文公式推导的正确性及3种方法等价性的论断。
| mm | |||||||
| 数据 | 均值 | 标准差 | |||||
| N | E | U | N | E | U | ||
| No.1 | -4.01 | 0.72 | -5.06 | 8.87 | 12.76 | 31.66 | |
| No.2 | 0.71 | 7.78 | -41.65 | 17.75 | 15.29 | 41.18 | |
为进一步证明采用时间相关观测动态解的必要性,下面将比较不顾及时间相关性和顾及时间相关性的平差结果。因3种顾及时间相关性的方法A、B和C等价,因此以方法A为例与不顾及时间相关性的方法作比较。由于两类方法的定位误差结果不是特别大,这与其他相关研究的结论是相同的[14, 30-31],因此没有展示它们的定位结果。但对一个完整的平差结果来说,参数估计固然重要,但精度评定同样不可或缺,因此笔者着重分析这两类方法对定位精度的影响。推导可得K个历元的基线解方差-协方差阵的精度评定公式



|
| 图 2 No.1数据U方向上不顾及和顾及时间相关性的定位精度比较 Fig. 2 Positioning precisions of ignoring and considering time correlations in U direction of dataset No.1 |
下面将以GNSS模糊度固定为例来研究考虑时间相关性的作用。基于LAMBDA方法,分别采用L1、L2和L1+L2进行单历元模糊度固定,并与真值比较分析模糊度固定成功率。以No.1为例,表 2显示的是不顾及和顾及时间相关性的模糊度固定成功率。当考虑时间相关性时,模糊度固定的成功率显著提高,平均提高约7%。其原因是考虑时间相关性的方差-协方差阵更加符合实际观测数据情况,导致模糊度搜索空间与浮点解相容[17]。
| (%) | |||
| 模糊度固定策略 | L1 | L2 | L1+L2 |
| 不顾及时间相关性 | 47.2 | 58.3 | 85.7 |
| 顾及时间相关性 | 55.0 | 65.4 | 92.2 |
5 结论
本文围绕解决现代大地测量数据处理中观测值时间相关的问题,深入研究并提出了几种时间相关观测的动态解法,包括无历元公用参数和有历元公用参数两类模型下3种方法的推导,即去相关变换法、差分变换法和MAP估计法,同时结合ACF,导出了它们的等价退化形式,得出以下结论:
(1) 推导出的3种顾及观测值时间相关性的动态解的结果是等价的且各有特点,因此在实际使用中可选择任意一种易于实现的方法。
(2) 导出的等价退化形式理论上简化了历元之间的关系,且有效提高了计算效率,可以应用于实时观测数据,便于编程计算。
(3) 算例表明,实际观测值中往往存在时间相关性,利用顾及观测值时间相关性的动态解能得到更为可靠和准确的计算结果,如可以提高模糊度固定成功率。
| [1] |
黄维彬.
近代平差理论及其应用[M]. 北京: 解放军出版社, 1992.
HUANG Weibin. Modern Adjustment Theory and Its Application[M]. Beijing: PLA Publishing House, 1992. |
| [2] |
杨元喜.
自适应动态导航定位[M]. 北京: 测绘出版社, 2006.
YANG Yuanxi. Adaptive Navigation and Kinematic Positioning[M]. Beijing: Surveying and Mapping Press, 2006. |
| [3] | YANG Y, HE H, XU G. Adaptively Robust Filtering for Kinematic Geodetic Positioning[J]. Journal of Geodesy, 2001, 75(2-3): 109–116. DOI:10.1007/s001900000157 |
| [4] |
李博峰.
混合整数GNSS模型参数估计理论与方法[M]. 北京: 测绘出版社, 2014.
LI Bofeng. Theory and Method of Parameter Estimation in Mixed Integer GNSS Model[M]. Beijing: Surveying and Mapping Press, 2014. |
| [5] | LI Bofeng, ZHANG Zhetao, SHEN Yunzhong, et al. A Procedure for the Significance Testing of Unmodeled Errors in GNSS Observations[J]. Journal of Geodesy, 2018, 92(10): 1171–1186. DOI:10.1007/s00190-018-1111-9 |
| [6] | ZHANG Zhentao, LI Bofeng, SHEN Yunzhong. Comparison and Analysis of Unmodelled Errors in GPS and BeiDou Signals[J]. Geodesy and Geodynamics, 2017, 8(1): 41–48. |
| [7] | GAZIT R. Digital Tracking Filters with High Order Correlated Measurement Noise[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(1): 171–177. DOI:10.1109/7.570736 |
| [8] |
黄贤源, 隋立芬, 范澎湃.
有色观测噪声的随机模型级数表示及其补偿法[J]. 武汉大学学报(信息科学版), 2008, 33(6): 644–647.
HUANG Xianyuan, SUI Lifen, FAN Pengpai. A New Approach for Colored Measurement Noises by Correcting Random Model[J]. Geomatics and Information Science of Wuhan University, 2008, 33(6): 644–647. |
| [9] |
林旭, 罗志才, 许闯, 等.
有色噪声的自协方差最小二乘估计[J]. 测绘学报, 2013, 42(6): 804–809.
LIN Xu, LUO Zhicai, XU Chuang, et al. Autocovariance Least Squares Estimation for Colored Noise[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(6): 804–809. |
| [10] |
杨元喜, 徐天河.
基于移动开窗法协方差估计和方差分量估计的自适应滤波[J]. 武汉大学学报(信息科学版), 2003, 28(6): 714–718.
YANG Yuanxi, XU Tianhe. An Adaptive Kalman Filter Combining Variance Component Estimation with Covariance Matrix Estimation Based on Moving Window[J]. Geomatics and Information Science of Wuhan University, 2003, 28(6): 714–718. |
| [11] |
崔先强, 杨元喜, 高为广.
多种有色噪声自适应滤波算法的比较[J]. 武汉大学学报(信息科学版), 2006, 31(8): 731–735.
CUI Xianqiang, YANG Yuanxi, GAO Weiguang. Comparison of Adaptive Filter Arithmetics in Controlling Influence of Colored Noises[J]. Geomatics and Information Science of Wuhan University, 2006, 31(8): 731–735. |
| [12] |
宋迎春, 朱建军, 陈正阳.
动态定位中测量噪声时间相关的Kalman滤波[J]. 测绘学报, 2006, 35(4): 328–331, 341.
SONG Yingchun, ZHU Jianjun, CHEN Zhengyang. Kalman Filter for Kinematic Positioning with Timing Correlated Observation Noises[J]. Acta Geodaetica et Cartographica Sinica, 2006, 35(4): 328–331, 341. DOI:10.3321/j.issn:1001-1595.2006.04.006 |
| [13] |
薛树强, 杨元喜.
连续观测系统的平差模型与有色噪声补偿[J]. 测绘学报, 2014, 43(4): 360–365.
XUE Shuqiang, YANG Yuanxi. Adjustment Model and Colored Noise Reduction of Continuous Observation System[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(4): 360–365. DOI:10.13485/j.cnki.11-2089.2014.0054 |
| [14] | LI Bofeng. Stochastic Modeling of Triple-frequency BeiDou Signals:Estimation, Assessment and Impact Analysis[J]. Journal of Geodesy, 2016, 90(7): 593–610. DOI:10.1007/s00190-016-0896-7 |
| [15] | HOWIND J, KUTTERER H, HECK B. Impact of Temporal Correlations on GPS-derived Relative Point Positions[J]. Journal of Geodesy, 1999, 73(5): 246–258. DOI:10.1007/s001900050241 |
| [16] | LI Bofeng, ZHANG Lei, VERHAGEN S. Impacts of BeiDou Stochastic Model on Reliability:Overall Test, w-test and Minimal Detectable Bias[J]. GPS Solutions, 2017, 21(3): 1095–1112. DOI:10.1007/s10291-016-0596-z |
| [17] | AMIRI-SIMKOEEI A, JAZAERI S, ZANGENEH-NEJAD F, et al. Role of Stochastic Model on GPS Integer Ambiguity Resolution Success Rate[J]. GPS Solutions, 2016, 20(1): 51–61. DOI:10.1007/s10291-015-0445-5 |
| [18] | CHANG Guobin. On Kalman Filter for Linear System with Colored Measurement Noise[J]. Journal of Geodesy, 2014, 88(12): 1163–1170. DOI:10.1007/s00190-014-0751-7 |
| [19] |
赵长胜.
有色噪声滤波理论与算法[M]. 北京: 测绘出版社, 2011.
ZHAO Changsheng. Colored Noise Filtering Theory and Algorithms[M]. Beijing: Surveying and Mapping Press, 2011. |
| [20] | PETOVELLO M, O'KEEFE K, LACHAPELLE G, et al. Consideration of Time-correlated Errors in a Kalman Filter Applicable to GNSS[J]. Journal of Geodesy, 2009, 83(1): 51–56. DOI:10.1007/s00190-008-0231-z |
| [21] |
胡国荣, 欧吉坤.
改进的高动态GPS定位自适应卡尔曼滤波方法[J]. 测绘学报, 1999, 28(4): 290–294.
HU Guorong, OU Jikun. The Improved Method of Adaptive Kalman Filtering for GPS High Kinematic Positioning[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(4): 290–294. DOI:10.3321/j.issn:1001-1595.1999.04.003 |
| [22] |
赵长胜, 陶本藻.
有色噪声作用下的卡尔曼滤波[J]. 武汉大学学报(信息科学版), 2008, 33(2): 180–182.
ZHAO Changsheng, TAO Benzao. Kalman Filtering of Linear System with Colored Noises[J]. Geomatics and Information Science of Wuhan University, 2008, 33(2): 180–182. |
| [23] | BRYSON JR A E, HENRIKSON L J. Estimation Using Sampled Data Containing Sequentially Correlated Noise[J]. Journal of Spacecraft and Rockets, 1968, 5(6): 662–665. DOI:10.2514/3.29327 |
| [24] | KERMARREC G, SCHÖN S. Taking Correlations in GPS Least Squares Adjustments into Account with a Diagonal Covariance Matrix[J]. Journal of Geodesy, 2016, 90(9): 793–805. DOI:10.1007/s00190-016-0911-z |
| [25] | BONA P. Precision, Cross Correlation, and Time Correlation of GPS Phase and Code Observations[J]. GPS Solutions, 2000, 4(2): 3–13. DOI:10.1007/PL00012839 |
| [26] | LI Bofeng, SHEN Yunzhong, XU Peiliang. Assessment of Stochastic Models for GPS Measurements with Different Types of Receivers[J]. Chinese Science Bulletin, 2008, 53(20): 3219–3225. |
| [27] |
杨元喜, 崔先强.
动态定位有色噪声影响函数——以一阶AR模型为例[J]. 测绘学报, 2003, 32(1): 6–10.
YANG Yuanxi, CUI Xianqiang. Influence Functions of Colored Noises on Kinematic Positioning:Taking the AR Model of First Class as an Example[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(1): 6–10. DOI:10.3321/j.issn:1001-1595.2003.01.002 |
| [28] | ASHCRAFT C, GRIMES R G, LEWIS J G. Accurate Symmetric Indefinite Linear Equation Solvers[J]. SIAM Journal on Matrix Analysis and Applications, 1998, 20(2): 513–561. DOI:10.1137/S0895479896296921 |
| [29] | GUO Jianfeng, OU Jikun, REN Chao. Partial Continuation Model and Its Application in Mitigating Systematic Errors of Double-differenced GPS Measurements[J]. Progress in Natural Science, 2005, 15(3): 246–251. DOI:10.1080/10020070512331342060 |
| [30] | ZHANG Zhentao, LI Bofeng, SHEN Yunzhong. Efficient Approximation for a Fully Populated Variance-covariance Matrix in RTK Positioning[J]. Journal of Surveying Engineering, 2018, 144(4): 04018005. DOI:10.1061/(ASCE)SU.1943-5428.0000259 |
| [31] | El-RABBANY A E S. The Effect of Physical Correlations on the Ambiguity Resolution and Accuracy Estimation in GPS Differential Positioning[D]. Fredericton: University of New Brunswick, 1994. |