



2. 中国科学院射电天文重点实验室, 江苏 南京 210008;
3. 上海市导航定位重点实验室, 上海 200030
2. Key Laboratory of Radio Astronomy, Chinese Academy of Sciences, Nanjing 210008, China;
3. Shanghai Key Laboratory of Space Navigation and Positioning Techniques, Shanghai 200030, China
甚长基线干涉测量(very long baseline interferom-etry,VLBI)技术诞生于20世纪60年代。得益于氢原子钟、现代通信、电子计算机等技术的快速发展以及观测方法的进步,VLBI测量能力进展迅速,其测量精确度已经达到亚毫角秒量级,是目前角分辨率最高的天文观测技术[1],在天体物理[2-3]、天体测量与大地测量(测地)[4]、深空探测[5-10]等多个领域发挥着重要作用。
VLBI系统通过分布在全球不同位置的VLBI射电望远镜(台站),在一段时间内连续地观测一系列射电源,数据经相关处理后再进行条纹拟合,钟差钟速改正,大气时延及电离层等传播介质补偿,最终得到的观测量可用于天文、测地及深空探测研究[1]。VLBI系统已被用于建立天球参考架。与基于恒星位置的参考架相比,基于河外射电源的天球参考架因具有更高的稳定性,更接近于理想惯性系,被国际天文学联合会(IAU)采纳为国际天球参考架(International Celestial Reference Frame, ICRF)[11-12]。此参考架确定了天球坐标系统的零点以及方向,并提供了一系列参考点,以确定其他天体在参考架中的精确位置。在测地方面,VLBI技术可用于研究地球运动状态变化和确定精确的时间系统,包括进动、章动、极移、世界时等。通过数年至数十年的长时间监测台站坐标的变化,还可分析地球板块运动[13-14]。
近年来国际VLBI大地测量与天体测量服务组织(IVS)[15-16]提出了满足VLBI2010技术标准的全球观测系统VGOS(VLBI2010 global observing system),以适应未来天体测量与大地测量的高精度需求[17]。VGOS系统的预期目标是:2020年后,将在全球尺度上,实现台站位置和地球定向参数的连续监测,24 h快速数据处理,VLBI台站位置精度达到1 mm。这些目标的实现需要对现有VLBI系统进行全面升级,主要包括:采用直径13 m左右的新型小口径望远镜,通过在单位时间内快速观测更多的射电源(每个scan时间30 s左右)实现全天区更好的参考源覆盖并获得更高的天线参考点稳定性;通过超宽带接收机数据采集系统,以16~32 Gbps高数据采样率增加小口径天线观测灵敏度。采用实时超宽带软件相关处理机、高速e-VLBI和自动化数据处理等关键技术以实现长期24 h不间断观测。
VLBI测地观测与数据处理的基本流程是:① VLBI数据中心制定观测纲要,确定观测时间、台站、频率等;② 台站根据观测纲要进行观测,并将数据和日志文件传到指定VLBI中心;③ VLBI中心相关处理机完成相关处理,生成可见度数据,经过相位校正、条纹拟合后,得到VLBI带宽综合时延和时延率,并生成专用数据库格式;④ 通过测地软件解算后,获得台站坐标、地球定向参数等测量结果。
相关处理是整个VLBI测地数据处理的重要步骤,具有数据密集和计算密集的特点。中国科学院上海天文台使用自主研发的CVN(Chinese VLBI network)测地软件相关处理机,已成功处理了数十次测地数据[18-19]。但是,由于该处理机采用探月工程的专用输出格式等原因,与国际测地VLBI处理机输出数据格式不兼容。为支持国际VLBI大地测量数据处理,CVN软件相关处理机进行了功能、性能升级,实现了输出结果的国际测地通用Mk4数据格式输出,提高了信噪比,使处理机结果可直接被通用VLBI测地后处理软件用于时延数据解算。本文以DiFX(distributed FX correlator)处理机[20-21]作为参照,系统比较了CVN软件相关处理机测地时延(率)。分析表明,CVN软件相关处理机测地数据精度与DiFX一致,可以用于IVS国际联测的数据处理以及台站站坐标解算。
1 软件相关处理机 1.1 VLBI相关处理机原理FX型(一条基线涉及的两台站信号先从时域到频域做傅里叶变换,再交叉相乘)VLBI相关处理机的输入是基线两端台站获得的时域信号,输出是台站间互相关谱(称为可见度函数)。由图 1,FX型相关处理机数据处理流程所示,两路信号进入相关处理机后首先按频率通道进行解码;然后根据预先计算的时延模型进行整数比特时延补偿;经过条纹旋转及快速傅里叶变换后,信号从时域变换至频域,并完成分数比特时延补偿;最终两路信号进行共轭相乘及累加积分,得到可见度数据。为完成精确的测地数据处理,对部分失效数据引入的误差必须进行精细的数据有效率控制,对在记录和传输过程中缺失的数据也需专门处理,并进行可见度函数幅度校正。

|
| 图 1 FX型相关处理机数据处理流程 Fig. 1 Data processing flow of FX type correlator |
由于光速有限,射电源发出的信号波前在不同时刻分别到达两个望远镜,二者的时间差被称为VLBI时延,表示为
 (1)
(1)
式中,τ为总时延;τ0和
根据不同实现方式,VLBI相关处理机可分为软件处理机和硬件处理机两类。近年来,基于通用CPU集群的软件相关处理机因其开发和调试方便、配置灵活、扩展性强等特点,已经成为VLBI相关处理机的主流形式。
CVN软件相关处理机最早由中国科学院上海天文台针对探月工程需求自主开发,已成功应用于嫦娥1号、2号、3号和探月三期CE-5T1试验,在一系列的月球探测器测定轨任务中发挥了关键作用。该相关处理机用C语言开发,运行于Linux集群,采用OpenMP和MPI实现并行,并使用Intel IPP库进行加速。处理机具备实时相关处理功能,并支持探测器信号的快速条纹搜索。在探月工程中,CVN处理机输出的可见度数据采用专用CVN格式,包含一个多维矩阵,能够输出各台站、基线的自相关和互相关函数及辅助信息。
为支持“九五”国家重大科学工程——中国地壳运动观测网络(陆态网),在探月工程相关处理机基础上研制的CVN测地软件相关处理机系统[23],已经成功支持了国内探月工程站坐标测量、陆态网络大量VLBI观测资料处理。2012年后,上海VLBI相关处理机被接纳为IVS相关处理机,准备承担国际观测数据处理任务。上海VLBI中心从2015年开始采用国外DiFX软件相关处理机承担常规的IVS国际数据处理任务,同时对CVN软件处理机进行功能与性能升级,使其能够输出国际通用数据格式,并提高了输出结果信噪比。
为支持测地数据的后处理,需要将CVN格式可见度数据结合时延模型、相位校正信号、钟差钟速等信息生成国际通用测地的Mk4格式,供测地数据后处理软件HOPS(Haystack observatory postprocessing system)读取并做条纹拟合。Mk4是VLBI处理机测地数据处理的输出格式,由美国Haystack天文台提出并作为HOPS的输入格式。Mk4格式由一系列具有相同后缀的文件组成,有5种类型:
(1) root文件——对应scan的整体信息,包括源名称,观测台站,观测时间,频率通道,等等。
(2) type-1文件——相关处理机输出的可见度数据。每条基线对应一个文件。
(3) type-2文件——条纹拟合结果,包括不同频段的带宽综合时延,单通道时延,时延率,信噪比等信息。每个type-1文件可以对应多次拟合,根据拟合序号被保留为多个type-2文件。
(4) type-3文件——台站信息,包括相位校正信号、时延模型,等等。
(5) type-4文件——日志信息,可选。
图 2显示了CVN处理机生成Mk4测地格式数据示意图。处理机采用专用软件读取输出的可见度数据数组、job文件和vex文件,以及可选的相位校正信号文件,生成root文件、type-1和type-3文件。HOPS软件包中的fourfit程序读取Mk4格式进行条纹拟合,将条纹拟合结果,包括残余时延(率)、总时延(率)、信噪比等输出至type-2文件。

|
| 图 2 CVN处理机输出Mk4格式示意图 Fig. 2 Demonstration of CVN correlator output to Mk4 format |
1.3 DiFX软件处理机
为便于判断CVN处理机结果正确性,采用国外DiFX处理机作为对比的参考对象。DiFX是目前世界上应用最广泛的VLBI软件相关处理机,由澳大利亚Swinburne大学、美国NRAO等联合开发,支持天体物理、测地以及深空探测等多种应用。DiFX采用C++语言,高度模块化,运行于Linux集群,使用Intel IPP进行加速。上海VLBI中心已于2015年建立了基于DiFX的天文与测地VLBI数据相关处理平台,目前已成功处理近30次IVS观测数据,得到了IVS组织认可[24]。基于现有的测地观测数据,通过将CVN和DiFX处理结果在不同后处理阶段进行比较,可分析验证CVN处理机的输出精度,为CVN处理机后续进行IVS数据处理做好准备。
2 CVN软件相关处理机与DiFX输出精度比较测地观测数据经过相关处理机后,可通过HOPS中的fourfit程序进行条纹拟合获得时延等观测量。条纹拟合的基本原理是构造全局相关函数
 (2)
(2)
式中,Δτm为带宽综合残余时延;Δτs为单通道残余时延;
带宽综合时延是条纹拟合时,分别综合S频段与X频段所有频率通道数据拟合出的时延,较准确地反映了S频段与X频段的群时延,在参数解算时作为观测量使用。本文使用HOPS中的alist程序读取条纹拟合结果,并从中提取每个scan每条基线拟合得到的带宽综合残余时延和时延率、带宽综合总时延、时延率和信噪比等信息。通过比较同一批观测数据经过两个相关处理机后的拟合结果的差异*,验证了CVN软件相关处理机的精度。在此基础上,本文通过一次完整的测地观测数据处理过程,比较了基于两个处理机相关数据的VLBI台站坐标解算结果,二者在误差范围内一致。
*本节所讨论的时延、时延率、信噪比差异含义为对应scan,波段和基线CVN结果减去DiFX结果的差值。
2.1 带宽综合残余时延和残余时延率精度比较带宽综合残余时延和残余时延率由条纹拟合程序根据可见度数据拟合得到,其拟合结果仅依赖于处理机的相关处理结果,是衡量处理机数据质量最直接的指标。在输入时延模型相同的情况下,两个处理机的带宽综合残余时延和残余时延率可以直接进行比较。比较时采用了2014年IVS联测数据,观测代码为k14349,共有挪威、中国(上海)、日本、德国4个台站(Ny,Sh,Ts,Wz),16个频率通道。每个通道带宽8 MHz;观测时长1 h,共30个scan。其中Wz站记录格式为Mark5a格式,其余3站为Mark5b格式。
本次处理使用的DiFX版本为2.4.1,其调用的Intel IPP库版本为7.0。为精确比较残余时延,两个处理机需采用同样的时延模型。为此,先将DiFX的时延模型替换为CVN的时延模型,然后再进行相关处理。DiFX的im文件中每个scan提供数个模型,彼此衔接,长度均为2 min。CVN处理机每个scan提供一个模型,起始终止时刻与scan重合。替换时保持DiFX模型起始终止时刻不变,将CVN处理机的5次多项式系数变换到每个DiFX模型开始时刻。相关处理时两处理机采用相同的设置,包括FFT点数、积分时间、钟差钟速等。在对两处理机的输出结果进行条纹拟合时,所有选项均采用fourfit默认设置,即采用相位校正信号自动调整和不剔除坏频率通道。在进行比较时,剔除了所有带有错误代码以及数据质量(QC,quality code)低于5的数据,并对两处理机的结果按照scan和基线进行匹配。此处的“数据质量”(QC)为fourfit程序对条纹拟合结果做的一个评估,分为0—9共10个等级(数字越高拟合质量越好)以及若干表示条纹拟合错误的字母。测地解算时通常采用数据质量不小于5的结果。
图 3是带宽综合残余时延差异随信噪比的变化。虚线和实线分别对应着X频段和S频段带宽综合残余时延弥散的理论值,由如下公式给出[2]

|
| 图 3 k14349带宽综合残余时延差异随信噪比变化 Fig. 3 Difference of multi-band residual delay for k14349 as a function of signal to noise ratio |
 (3)
(3)
式中,SSNR是信噪比;frms是对应频段的各频率通道带宽均方根,根据k14349的频率配置,X频段和S频段分别为298.3 MHz和50.9 MHz。由于S频段相比于X频段频率通道带宽均方根较小,相同信噪比条件下,其对应的带宽综合时延弥散较大。由图中可以看出两个处理机的带宽综合残余时延差异随着信噪比的增加而减小,并远小于理论弥散值。图中,X频段和S频段的带宽综合残余时延的加权平均差异分别为0.02 ps和0.74 ps;弥散或加权均方根(weighted root mean square,WRMS)分别为0.77 ps和9.35 ps。加权平均差异远小于加权均方根,说明数据围绕0值波动,无显著系统性偏差。S频段加权均方根差异超过9 ps。此差异源于两处理机实现细节的不同:Wz站数据采用Mark5a格式数据,DiFX输出的最后一个积分周期结束时刻在scan结束时刻之后,而CVN软件相关处理机所有积分周期均在scan范围内,从而导致DiFX在处理某些scan数据时会比CVN处理机多输出一个积分周期,条纹拟合时结果略有不同。
图 4是残余时延率随信噪比的变化,同样可以看出差异随着信噪比的增加而减小,S频段差异比X频段要大,但是大部分在0.1 ps/s之内。

|
| 图 4 k14349残余时延率差异随信噪比变化 Fig. 4 Difference of multi-band residual delay rate as a function of signal to noise ratio |
图 5展示了k14349观测CVN处理机相对于DiFX处理机结果信噪比的差异,以百分比表示。二者大部分数据信噪比相对差异在0.5 %以内。少量数据CVN结果相较于DiFX低约2 %。信噪比稍较低同样是由于某些情况下DiFX会多输出一个积分周期导致其对应条纹拟合结果信噪比较CVN结果稍高。

|
| 图 5 k14349信噪比的相对差异 Fig. 5 Difference of signal to noise ratio for k14349 CVN结果相对于DiFX结果的差异 |
2.2 带宽综合总时延和总时延率精度比较
可见度数据经条纹拟合后,得到残余时延(率),通过将其与对应时刻模型时延(率),以及钟差(速)相加,可以得到总时延(率)。本节比较所采用的原始数据为CVN组织的乌鲁木齐南山站(Ur)改造后的站坐标测定试验,观测代码为cn1502。北京密云、上海佘山、云南昆明和乌鲁木齐南山4个CVN台站参加(代号Bj,Sh,Km,Ur),采用S/X双频共16个频率通道,每通道带宽8 MHz;观测时长24 h,共227个scan。观测数据分别用DiFX和CVN软件相关处理机处理,各自采用独立的时延模型。DiFX版本为2.3,其调用的Intel IPP库版本为7.0,模型计算使用Calc9.1。CVN模型计算程序由上海天文台研发,并与国际上的主流模型进行了比较[25]。相关处理时两处理机采用相同的设置,包括FFT点数、积分时间、钟差钟速等。处理机结果采用fourfit做条纹拟合,两组数据剔除的相同的坏频率通道。
由于Bj站没有注入相位校正信号,各台站相位校正均采用手动模式,并对两处理机数据对应通道采用相同的校正值。这样做的原因是,由于两处理机所采用不同的时延模型导致残余条纹的差异,基于两组数据各自进行相位校正会导致一个恒定的相位差异,进而导致条纹拟合时各基线10 ns量级的恒定时延差异。该恒定时延差异完全由于相位校正时不同的初相造成,不影响解算结果。为比较时延的弥散情况,拟合采用了相同的相位校正值,以获得同样的初始相位。本次观测4个台站均采用Mark5b格式记录,不会出现上节中DiFX处理机某些scan比CVN处理机多输出一个积分周期的情况。由于开发环境、任务划分策略等算法实现细以及所采用时延模型的不同,两个处理机的拟合结果以及台站坐标解算结果不完全相同,但分析显示结果在精度范围内一致。
图 6显示了cn1502各基线精度差异。每幅图从上到下依次是带宽综合总时延差异、总时延率差异、信噪比差异。由图可知,WRMS与信噪比呈反相关关系,信噪比较低时WRMS较大。在本次观测中,Ur站由于X频段馈源两个IF的极化均接反,导致Ur站与极化正确台站的相关基线在X频段上信噪均较低,普遍在20以下((f)、(j)图),但Sh站X频段两个IF的一个极化也接反,恰好与Ur站一致,导致对应Sh-Ur基线X频段信噪比反而较高,总的效果介于全部接反和全部正确之间(图l)。除Ur站以外的其余基线X频段信噪比较高,普遍高于20,对应的WRMS均在3 ps以内((b)、(d)、(h)图)。数据表明,两个处理机计算的总时延率符合很好,差异通常在0.1 ps/s以内。

|
| 图 6 cn1502各基线精度差异比较 Fig. 6 Precision comparison of each baseline for cn1502 各分图中从上到下依次为带宽综合总时延差异、总时延率差异和信噪比 |
图 7展示了cn1502两处理机结果数据信噪比的相对差异。由于参与相关的4个台站均为Mark5b格式,两处理机每个scan输出有效积分周期个数基本相同,相较于k14349,信噪比的差异更小,基本集中在0.5%的范围内。

|
| 图 7 cn1502信噪比的相对差异 Fig. 7 Difference of signal to noise ratio for cn1502 |
2.3 台站坐标解算精度比较
在完成cn1502后处理之后,将其导入vgosDB数据库进行Ur台站坐标解算。本次解算使用了最新的测地VLBI后处理软件nuSolve0.2.2版本,由NASA/GSFC开发[26]。nuSolve解算的算法基于广泛使用的传统测地软件CALC/SOLVE。由于借鉴了现代软件工程的开发方法,更加注重用户体验,nuSolve安装和使用均比CALC/SOLVE便捷。针对两个处理机的输出结果,nuSolve附带的vgosDbMake程序将条纹拟合得到的Mk4格式转换为vgosDB版本1数据库;vgosDbCalc程序调用Calc 11生成vgosDB版本2数据库;vgosDbProcLogs程序读取4个台站的log文件,生成vgosDB版本3数据库。数据库准备好之后,使用nuSolve将其分别导入,进行相同的数据操作,基本流程是:
(1) 选择要导入的数据库。
(2) 切换到单通道时延(SB delay),剔除坏数据点,逐基线调整跳秒。
(3) 切换到群时延(GR delay),解模糊度(ambig)。
(4) 解电离层改正值(IonoC)。
(5) 解大气时延(zenith delay)和台站坐标(station)。两组数据均选择Sh站为参考站。
(6) 解基线钟差(baseline clocks)。两组数据均选择Bj站为参考站。
(7) 解时间变化率(dUT1 rate)、章动(nutation)。
(8) 做权重调整(reweighting)。
(9) 做数据修整(outliner),首先剔除(elimination)模式,再恢复(restoration)模式,然后重复,直到没有数据被剔除。
(10) 解算完成,生成解算报告。
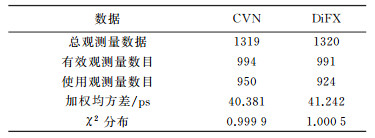
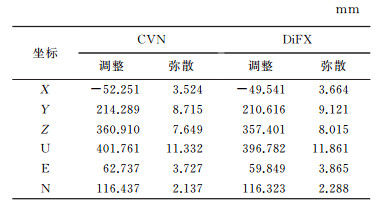
对两个处理机的对应数据根据上述步骤进行了解算、评估(见表 1)。解算过程中所涉及的观测量均为时延,其中有效观测量是指通过fourfit进行条纹拟合得到的数据质量在5—9之间的数据。表 1显示,两组数据的观测量数目及拟合质量一致。由前文可知,两处理机条纹拟合结果差异的均方差约10 ps,小于解算结果的均方差(40 ps),即CVN处理机输出结果的条纹拟合精度可以满足解算的需要。本次解算主要关心Ur站坐标,两组数据的解算结果X、Y、Z、U、E、N分量结果分别罗列于表 2中。解算结果表明,在精度范围内,两组数据对于Ur站坐标的解算结果无显著差异。
3 结论
为支持VLBI国际测地数据处理,CVN软件相关处理机进行了升级改造。通过对CVN和DiFX软件相关处理机的测地观测结果的条纹拟合及站坐标解算,分析了CVN软件相关处理机测地应用精度。结果表明,两处理机输出的带宽综合残余时延的加权平均差异无系统性偏差,S频段加权均方差在10 ps之内,X频段加权均方差在1 ps以内。S频段带宽综合总时延差异的加权均方差在9 ps以内,X频段在信噪比较高时(大于20) 加权均方差在3 ps以内。残余时延率和总时延率差异通常在0.1 ps/s以内。信噪比差异通常在0.5%以内。两个处理机相关结果分别经参数解算得到的乌鲁木齐南山站坐标一致,差异在误差范围内。综合对比试验数据可知,CVN软件相关处理机已经达到了测地数据处理要求,具备处理IVS国际联测数据的能力。
| [1] | THOMPSON A R, MORAN J M, SWENSON G W JR. Interferometry and Synthesis in Radio Astronomy[M]. New York: Wiley-Interscience Publication, 2001. |
| [2] | FISH V L, JOHNSON M D, DOELEMAN S S, et al. Persistent Asymmetric Structure of Sagittarius A on Event Horizon Scales[J]. The Astrophysical Journal, 2016, 820(2): 90. DOI:10.3847/0004-637X/820/2/90 |
| [3] | WALTER F, BRINKS E, DE BLOK W J G, et al. THINGS: The H I Nearby Galaxy Survey[J]. The Astrophysical Journal, 2008, 136(6): 2563. |
| [4] | 乔书波, 李金岭, 柴洪洲, 等. 天球参考架的稳定源选取及其最新实现[J]. 测绘学报, 2010, 39(2): 120–128. QIAO Shubo, LI Jinling, CHAI Hongzhou, et al. Newly Realization of Celestial Reference Frame by Stable Sources Selection[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(2): 120–128. |
| [5] | 乔书波, 李金岭, 孙付平. VLBI在探月卫星定位中的应用分析[J]. 测绘学报, 2007, 36(3): 262–268. QIAO Shubo, LI Jinling, SUN Fuping. Application Analysis of Lunar Exploration Satellite Positioning by VLBI Technique[J]. Acta Geodaetica et Cartographica Sinica, 2007, 36(3): 262–268. DOI:10.3321/j.issn:1001-1595.2007.03.004 |
| [6] | 钱志瀚, 李金岭. 甚长基线干涉测量技术在深空探测中的应用[M]. 北京: 中国科学技术出版社, 2012. QIAN Zhihan, LI Jinling. The Application of Very Long Baseline Interferometry in Deep Space Navigation[M]. Beijing: China Science and Technology Press, 2012. |
| [7] | 陈世杰, 杜兰, 旦增曲英, 等. 航天器姿轨控始末时刻的动力学标定方法[J]. 测绘学报, 2013, 42(6): 824–830. CHEN Shijie, DU Lan, DANZENG Quying, et al. Dynamic Detection Algorithm for Spacecraft Attitudinal Control and Orbital Control Epoch[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(6): 824–830. |
| [8] | 童锋贤, 郑为民, 舒逢春. VLBI相位参考成像方法用于玉兔巡视器精确定位[J]. 科学通报, 2014, 59(34): 3362–3369. TONG Fengxian, ZHENG Weimin, SHU Fengchun. Accurate Relative Positioning of Yutu Lunar Rover Using VLBI Phase-referencing Mapping Technology[J]. Chinese Science Bulletin, 2014, 59(34): 3362–3369. |
| [9] | 周欢, 童锋贤, 李海涛, 等. 深空探测器同波束相位参考成图相对定位方法[J]. 测绘学报, 2015, 44(6): 634–640. ZHOU Huan, TONG Fengxian, LI Haitao, et al. Relative Position Determination between Deep-space Probes Based on Same Beam Phase-referencing Imaging Technique[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(6): 634–640. DOI:10.11947/j.AGCS.2015.20140240 |
| [10] | 朱柯, 郑为民, 童锋贤, 等. 深空探测器VLBI成图技术研究[J]. 中国科学:物理学力学天文学, 2016, 46(8): 089513. ZHU Ke, ZHENG Weimin, TONG Fengxian, et al. A Study of VLBI Imaging Techniques for Deep Space Probes[J]. Scientia Sinica: Physica, Mechanica & Astronomica, 2016, 46(8): 089513. |
| [11] | MA C, ARIAS E F, EUBANKS T M, et al. The International Celestial Reference Frame as Realized by Very Long Baseline Interferometry[J]. The Astronomical Journal, 1998, 116(1): 516. DOI:10.1086/300408 |
| [12] | MA C, ARIAS E F, BIANCO G, et al. The Second Realization of the International Celestial Reference Frame by Very Long Baseline Interferometry[R]. IERS Technical Note No. 35. Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, 2009. |
| [13] | 李金岭, 王广利. 上海VLBI站相对于欧亚板块稳定区域的运动[J]. 中国科学院上海天文台年刊, 2001(22): 57–62. LI Jinling, WANG Guangli. The Relative Motion of Shanghai VlbI Station to the Stable Part of Eurasia Plate[J]. Annals of Shanghai Observatory Academia Sinica, 2001(22): 57–62. |
| [14] | FEIGL K L, AGNEW D C, BOCK Y, et al. Space Geodetic Measurement of Crustal Deformation in Central and Southern California, 1984-1992[J]. Journal of Geophysical Research, 1993, 98(B12): 21677–21712. DOI:10.1029/93JB02405 |
| [15] | BEHREND D. Data Handling within the International VLBI Service[J]. Data Science Journal, 2013, 12: WDS81–WDS84. |
| [16] | SCHUH H, BEHREND D. VLBI: A Fascinating Technique for Geodesy and Astrometry[J]. Journal of Geodynamics, 2012(61): 68–80. |
| [17] | PETRACHENKO W, BEHREND D, HASE H, et al. The VLBI2010 Global Observing System (VGOS)[C]//General Assembly European Geosciences Union. Vienna, Austria: EGU, 2013. |
| [18] | SHU F, ZHENG W, ZHANG X, et al. Shanghai Correlation System Upgrade for Geodetic Application[C]//Proceedings of the 19th European VLBI for Geodesy and Astrometry Working Meeting. Bordeaux, Frane: VLBI, 2009. |
| [19] | WANG Guangli, XU Minghui, ZHANG Zhibin, et al. The CVN Geodetic Observation and Its Result[C]//Proceedings of the 22nd European VLBI Group for Geodesy and Astronomy Working Meeting. Azores, Portugal: EVGA, 2015. |
| [20] | DELLER A T, TINGAY S J, BAILES M, et al. DiFX: A Software Correlator for Very Long Baseline Interferometry Using Multiprocessor Computing Environments[J]. Publications of the Astronomical Society of the Pacific, 2007, 119(853): 318–336. DOI:10.1086/509215 |
| [21] | DELLER A T, BRISKEN W F, PHILLIPS C J, et al. DiFX-2: A More Flexible, Efficient, Robust, and Powerful Software Correlator[J]. Publications of the Astronomical Society of the Pacific, 2011, 123(901): 275–287. DOI:10.1086/658907 |
| [22] | TAKAHSASHI F, KONDO F, TAKAHASHI Y, et al. Very Long Baseline Interferometer (Wave Summit Course)[M]. Tokoyo: Ohmsha Ltd., 2000. |
| [23] | ZHENG Weimin, QUAN Ying, SHU Fengchun, et al. The Software Correlator of the Chinese VLBI Network[C]//Proceedings of the Sixth International VLBI Service for Geodesy and Astronomy. Hobart, Tasmania, Australia: VLBI, 2010: 157-161. |
| [24] | SHU Fengchun, ZHENG Weimin, JIANG Wu, et al. Shanghai VLBI Correlator[C]//International VLBI Service for Geodesy and Astrometry 2014 Annual Report. 2015: 171. |
| [25] | KLOPOTEK G, ARTZ T, BELLANGER A, et al. Results from the VLBI Analysis Software Comparison Campaign 2015[C]//International VLBI Service for Geodesy and Astrometry 2016 General Meeting. Johannesburg, South Africa: VLBI, 2016. |
| [26] | BOLOTIN S, BAVER K, GIPSON J, et al. Current Status of nuSolve[C]//Proceedings of the 21st Meeting of the European VLBI Group for Geodesy and Astronomy. Espoo, Finland: VLBI, 2013: 77-80. |