


2. 武汉大学测绘遥感信息工程国家重点实验室, 湖北 武汉 430079
2. State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China
我国交通基础设施近年来得到高速发展,截至2016年末,全国高速公路通车里程达到130 000 km,高速铁路运营里程超过20 000 km。随着道路/轨道的投入使用,必须要对其进行经常性的检测和测量,以确保其处于正常的使用状态。高精度、高效率和高细致测量是道路/轨道等大型基础设施检测的3个基本要求。传统的精密工程测量采用人工静态离散观测和几何模型解算方法,虽然可以达到高精度和高可靠性的要求,但是无法满足交通基础设施的大范围、连续、高效和细致的检测与测量要求[1-3]。
以多传感器集成技术为核心的动态观测和多源时空数据的协同解算是精密测量发展的重要方向,动态化、自动化、智能化、集成化和实时化是未来精密测量发展的必然要求。近年来,随着传感器技术、激光测微技术、图像智能处理技术以及计算机技术的快速发展,基于时空动态数据的感知、分析和认知的精密测量技术取得了长足的进步,并在道路/轨道精密检测与测量领域得到了成功的应用,并将会发挥越来越大的作用[4-6]。本文针对道路/轨道的动态精密测量所涉及的时空基准建立与维持、观测数据协同处理等关键技术及其应用展开论述。
1 多测量系统时空基准的统一与转换动态精密测量面临的核心问题是动态环境下各传感器时空参考框架的统一,包括高精度时空基准的统一与转换。
1.1 多测量系统时间基准的统一高精度时间基准的建立与维持是实现动态测量的基础,参与测量的各个传感器必须工作在统一的时间基准下。建立时间基准需要两个基本要素:时间的计量起点和时间间隔的长度。全球导航卫星系统(GNSS)是目前应用最为广泛的一种定位和授时系统[7],GNSS卫星的原子钟频率稳定度为1×10-13左右,并可以通过地面注入站适时修正GNSS卫星的时钟,使其达到预定的导航与定位精度要求,因此,GNSS时钟是一种理想的高精度时间参考基准。另外,时间间隔的长度一般采用时钟来计量,常用时钟产生方法包括LC振荡器、石英晶体振荡器、锁相环、直接数字频率合成以及原子频标等。直接数字频率合成技术(DDS)具有极高频率分辨率,可以实现输出信号快速频率切换,并且在输出信号频率改变时能够保持相位连续,特别是具有容易实现输出信号频率、相位和幅度的数控调制等优势,常作为时间基准的高精度时钟源。
为了提高时间基准的长期稳定度,采用GNSS输出的秒脉冲(PPS)对DDS输出时钟进行调控,其原理是通过检测基准时钟边沿与GNSS输出的PPS边沿之间的偏差,进而控制DDS输出时间基准的相位,使之在时间上对齐,从而建立和维持高精度的时间基准。
1.2 多测量系统空间基准的统一空间基准是一组用于位置测量和计算的参考点、线、面,各个坐标系的定义都建立在给定的基准之上。坐标参照系是提供系统原点、尺度、定向及其时间演变的一组协议、算法和参数。坐标参考框架是一组具有相应坐标参照系下坐标及其时间演变的点,它是坐标参照系的具体实现。动态精密测量可以通过GNSS获取对应的坐标参考框架下的状态量,并通过GNSS、惯性导航系统(INS)以及距离测量装置(DMI)的融合建立该参考框架下的动态测量坐标系统。
惯性导航系统(INS)在给定初始状态下,根据三轴加速度计及三轴陀螺仪的测量值,由导航计算机计算每个时刻的位置、速度和姿态。由于INS采用积分运算的方式进行导航状态解算,会导致传感器测量噪声及误差不断地累积,使得推算出的位置、速度和姿态数值随时间增长会逐渐偏离真实值。INS数据更新快、短时精度高且稳定性好,而GNSS具有较好的长期精度,因此基于GNSS/INS组合的导航定位系统可以长时间持续保持较高的位置精度和数据更新速度。道路/轨道等基础设施的精密测量也可采用距离测量装置(DMI)辅助GNSS/INS进行组合解算。DMI输出速度值和位移值,可以显著提高GNSS/INS组合导航中的速度和位置精度。GNSS/IMU/DMI组合导航可由扩展卡尔曼滤波器(EKF)来实现[8],其组合导航算法流程如图 1所示。

|
| 图 1 GNSS/IMU/DMI组合导航算法流程 Fig. 1 Flow chart of GNSS/IMU/DMI integrated navigation algorithm |
1.3 时空关联与时空基准的高精度转换
在动态测量中,需要将各个传感器的位置姿态与其对应的时间相关联,才能实现各观测传感器数据的高精度融合[9-10]。多传感器同步控制的核心思想是要将高精度时间基准转换到各个传感器,使不同传感器获取的数据具有同一时间基准下的精确的时间标签,从而为不同类型观测数据的同步提供参考标识。
根据传感器的工作特性,可将同步控制方式分为3种:主动同步、被动同步以及授时同步。主动同步是指控制电路主动向传感器发送同步控制指令,控制器记录同步控制指令的精确时刻。被动同步是指移动测量系统工作时,各传感器向同步控制器发送相应的同步工作信号,同步控制器接收到该信号后,由内部中断响应机制记录下该信号发生的精确时刻。授时同步是指同步控制器只需完成传感器的时间授时,传感器接收授时的PPS脉冲和时间信号,实现所采集的数据和时间的高精度关联。
2 多源动态观测数据协同处理动态精密测量采集的传感器数据具有时间多粒度、空间多尺度、海量以及噪声强等特点,且常常不满足经典测量误差理论的前提假设。因此,多源数据的融合配准、数据的质量增强、基于目标精细三维模型的特征提取与识别是多源动态观测数据处理的重要研究内容。
2.1 激光扫描数据、影像与POS数据融合配准移动三维激光扫描系统是一种典型的动态测量系统,一般装备有激光扫描仪、GNSS/IMU组合测量装置(POS)及全景相机等数据采集传感器,各个传感器获取的数据在物理含义、频率及空间维度都不相同,为了得到对所观测的客观地物目标的统一描述,需要将3种数据进行融合配准,得到颜色点云数据[11]。
如图 2所示,OW-XWYWZW代表WGS-84坐标系,OPOS-XPOSYPOSZPOS代表POS坐标系,OS-XSYSZS表示相机成像坐标系,OL-XLYLZL表示激光扫描坐标系。设激光扫描P点的时刻为tL,P点的激光扫描点在OW-XWYWZW坐标系下的坐标如式(1)
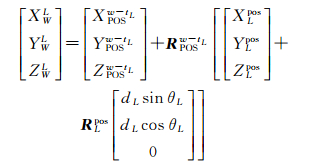 (1)
(1)

|
| 图 2 4个坐标系之间的关系 Fig. 2 The relation between four coordinate systems |
设相机拍摄P点的时刻为tS,设P点在OS-XSYSZS坐标系下的坐标为[XS, YS, ZS]T,P点的成像点在OW-XWYWZW坐标系下的坐标如式(2)
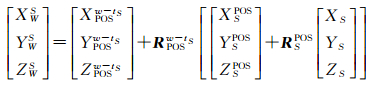 (2)
(2)
联合解算式(1) 和式(2),可得P点在成像系统中坐标[XSYSZS]T,即
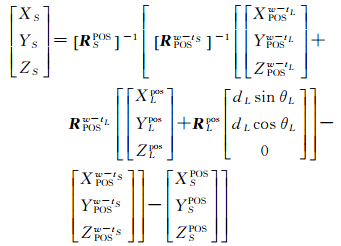 (3)
(3)
为了得到P点的坐标,只需要实现从激光扫描坐标系中的坐标到CCD图像成像点的坐标的映射,从而获得P点的颜色信息,如式(4)
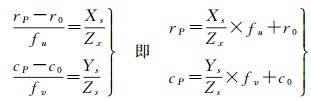 (4)
(4)
颜色点云数据是精密测量得到的一种重要的数据形态,描述其质量的指标主要有精度、可靠性和密度等。在实际应用中,点云数据的精度和可靠性往往是最受关注的。对点云数据的精度控制和可靠性评估方法主要有数据驱动和模型驱动两大类[12]。
数据驱动技术利用地面控制点(GCP)直接提高点云数据精度。常用方法有:① 从点云中提取控制标靶,然后采用条带平差处理方法以纠正数据的绝对误差;② 采用路面标记作为地面控制点来评估点云精度和控制点云质量;③ 采用最邻近点迭代算法(ICP)计算点云到地面控制点的变换参数;④ 利用12参数仿射变化法以改善点云精度。这些数据驱动的方法通过坐标变换直接对点云数据进行改正,其改善效果取决于很多因素,如控制点数量和分布、目标属性等。实际应用中,往往与控制点具有相近扫描角度以及相似误差的点的精度能得到显著提高,而其他点的精度提高则相对较弱[13]。
模型驱动技术侧重分析动态精密测量装置可能存在的随机误差和系统误差及其对点云的影响,进而建立误差分配模型。该模型将定位定姿(POS)误差视为噪声,激光扫描仪和POS之间的标定参数误差被看作系统误差。模型驱动方法常常注重POS与激光扫描仪之间的标定参数误差的修正,而忽略了POS本身存在的误差,但是POS误差在某些情况下将是动态精密测量误差的主要来源[14]。
动态精密测量装置的姿态误差可以被看作是一种较小的随机误差,而定位误差则仅仅在GNSS信号良好的条件下能得到较好的修正。在GNSS信号较差的环境中,GNSS精确性会大大降低,INS累积位置误差将得不到应有的补偿,甚至可能被错误修正,从而产生较大的定位误差。由于反向平滑处理使得POS轨迹连续、平滑、定位误差呈现出一种随时间平稳变化的趋势性。考虑到GNSS误差具有很强的随机性,最终POS定位误差中将包含趋势误差和随机误差。针对这种误差模型,可以采用最小二乘配置模型对POS的误差进行改正以提高点云的精度。
2.3 基于精细三维模型的目标特征提取与识别动态精密三维测量技术通过激光扫描仪可以获得与被检测物体直接相关的点云数据,其中包含了丰富特征信息,如被测物体轮廓、微观粗糙度以及缺陷等。目标的特征提取与识别就是从测量数据中自动检测并识别出这些特征信息,为后期的模型重建作准备[15-17]。
通常情况下,物体轮廓包括标准轮廓、控制轮廓及表面微观粗糙度等。标准轮廓反映了物体无缺陷情况下的表面轮廓;控制轮廓是指表面轮廓的大致形状,包含了控制轮廓和表面较大尺度的变形;微观粗糙度是指表面微观的深度的波段。针对表面控制轮廓,可以通过对点云采用级联滤波的方法,去除局部缺陷以及微观粗糙不平的点。标准轮廓是指物体自然状态下理想的外形。表面缺陷及微观粗糙度可以通过物体的点云与控制轮廓的差值获得[18-21]。
不同被测物体的形状、粗糙度及几何尺寸等特征不同,不同测量对象的变形特征也不同。通常情况下,描述变形特征包含线性特征(变形深度、长度、宽度、曲率、方向、距离等)、面阵特征(变形区域的深度、面积等)、变形程度特征(如轻、中、重)、连续性特征等。在变形特征提取中,结合变形特征知识库信息,提取预定义的特定变形特征。
三维目标识别技术主要分为两类:① 基于几何模型的三维模型匹配,该方法是将数据场景与模型库中的三维模型进行几何匹配;② 基于形状的二维模型描述,该方法是将三维识别问题转化为一组二维识别问题,其中每个目标的标识用基于形状的二维描述。常用的方法是模板匹配,常用的相似性度量指标是相关度[22]。
3 动态精密测量典型应用动态精密测量技术以多传感器集成技术为核心,具有很好的误差补偿能力,在高精度道路/轨道的检测与测量中发挥了重要作用:① 用于道路的平整度精密测量、车辙精密测量、路基弯沉值动态测量及路面损坏测量;② 用于轨道几何参数快速测量、轨道扣件状态动态检测及钢轨伤损自动检测。
3.1 高精度道路检测与测量 3.1.1 道路平整度测量路面平整度是评价路面使用性能的重要指标,它反映了车辆行驶的舒适度、路面的安全性及使用状态。评价道路平整度的指标一般采用国际平整度指数(international roughness index,IRI)[23]。
通常采用的加速度惯性补偿的激光平整度测量方法因其高效性和准确性,已经成为平整度检测的主流方法。该方法采用高精度的激光测距仪测量检测车车体与路面之间的距离,再使用加速度计的二次积分值补偿激光测距值,从而获得道路纵断面相对高程数据,以此计算道路平整度指标。鉴于加速度计本身的误差,以及复杂的道路检测环境,可以利用加速度数据积分计算过程中所得到的瞬时速度数据和位移数据的序列之间的关系,结合小波变换多分辨率和逐层分解的特性,从而精确地得到路面的平整度指数[24]。
3.1.2 道路车辙深度精密测量车辙测量方法有激光断面仪法、线结构激光三角法以及激光扫描测量法等[25-26]。
激光断面仪法在横断面方向上布置13个或更多的单点激光测距传感器测量道路的横断面高程,以得到车辙值,但是由于测量姿态及驾驶等原因,不能精确测量车辙造成的横断面的波峰与波谷,得到的车辙深度普遍偏低,限制了其在道路检测领域的应用。
激光三角车辙测量法是目前应用最为广泛的测量方法。其原理为:激光线从一侧以一定角度投射到道路表面,面阵CCD相机从另一侧以一定角度采集道路表面图像,如果物体表面有形变,则激光线发生变形。通过对相机进行精细标定,形成像素级标定表,可直接计算出曲线对应的物方实际坐标,从而获取道路表面的横断面数据,进而计算车辙深度。
激光扫描方法采用高精度激光雷达实现毫米级的激光测距精度,在扫描棱镜的转动下,实现对道路横断面的扫描测量。由于激光扫描仪的体积小容易安装、抗环境光干扰能力强、测量精度和可靠性好等优点,逐步将成为车辙测量的重要方法。
3.1.3 道路路基弯沉值动态测量路面弯沉值是表征道路路基路面整体强度的重要参数,反映了路面各结构层及土基的整体强度和刚度,也直接反映了路面的使用性能。常用道路弯沉测量方法有贝克曼梁、自动弯沉仪和落锤式弯沉仪及多功能检测车等测量方法[27-28],但是这些方法检测速度慢。
动态弯沉测量装置以重型牵引车为测量平台,可以在正常交通速度20~90 km/h范围内正常测量道路弯沉值。该方法建立在弹性地基梁的基础上,通过安装在刚性横梁上的多个高精度激光测速仪测量路面在动荷载作用下的变形速度,采用欧拉-伯努利方程反演路面弯沉。实践表明,基于变形速度的动态弯沉测量方法一次测量只需要一次采样,并能够满足0.01 mm测量精度要求。
3.1.4 路面病害检测公路路面在使用过程中,由于车辆荷载和自然因素的作用会出现裂缝等病害,这些病害随着时间的推移而日趋严重,并将会影响到车辆行驶速度、行驶安全性和道路维护。动态精密测量系统采用高分辨率成像装置获取路面的高质量数字影像,然后通过病害提取软件识别裂缝等病害。裂缝自动识别的精确性和可靠性是路面病害识别的关键技术[29-30]。
裂缝是图像中空间分布相对集中、与背景有一定区分度、具备一定几何特征且与整个图像相比占有比例非常小的一部分像素组成。针对获取的路面图像,采用基于亮度高程模型的算法消除阴影,在整体上降低阴影的影响的同时,保持和增强裂缝等病害的完整性、连续性与可识别性[31]。通过提取组成裂缝的像素在图像中的空间分布特征,用稀疏表征的方法对图像重认知,快速定位疑似裂缝区域。对疑似裂缝区域进行子分块划分。以子块为单位提取裂缝的特征值,根据模糊神经网络模型计算该子块内的裂缝置信度。在置信区域内结合分块置信度综合确定裂缝发展趋势,采用感知编组及动态规划的方法实现裂缝定位、自动跟踪与检测[32-37]。
3.2 精密轨道测量 3.2.1 轨道几何参数快速测量轨道几何参数的测量对确保列车安全行驶、改善轨道状态及延长轨道部件和机车车辆使用寿命等有重要的指导作用[38]。主要的轨道几何参数有:超高、三角坑、高低不平顺以及轨向不平顺。轨道动态精密测量系统采用激光扫描仪/惯性测量单元/里程计紧组合的方法实现轨道检测平台的精确位置与姿态的测量,从而计算出轨道几何参数。
3.2.2 轨道扣件状态动态检测轨道扣件状态检测常采用计算机视觉和图像处理等技术实现[39-40]。其中,常利用线结构激光传感器获取扣件系统的高精度和高精细三维点云数据,然后对扣件系统的三维点云进行分类与精细建模,进而可以测量扣件弹舌离缝值,并判定扣件系统是否存在零部件脱落、错位以及型号不符等病害。另外通过轨枕检测器配合高清相机获取扣件弹条的高清图像,通过图像的分析与处理,实现弹条疲劳裂缝自动识别。
3.2.3 钢轨伤损自动检测钢轨伤损检测技术常采用超声波技术[41-43],探测钢轨内部的裂纹及核伤。基于精密三维测量技术,通过线结构激光传感器获取精细的钢轨三维模型,通过与标准钢轨轮廓进行比较,可以测量钢轨磨耗,并可检测钢轨的轨顶面及作用面是否有擦伤、剥离及掉块等表面病害。
4 结论与展望测量精度更高、可靠性更强、自动化更优、实时性更好的动态测量技术是未来精密测量发展的重要趋势。本文主要介绍了针对道路/轨道等带状目标的动态精密测量及其关键技术,涉及高精度时空基准统一与转换、多传感器时间同步控制、观测数据的融合配准、测量数据的质量增强以及基于精细三维模型的特征提取与识别等技术,并简要介绍了动态高精度测量在道路检测、轨道检测中的应用。目前,已经研制出大批高精度的智能化测量仪器来满足现有的工程测量需求,同时自动化实时测量的精度要求不断提高,也对软硬件的进一步研发提出要求。伴随传感器技术的不断发展,未来将会有精度更高、频率和速度更快、价格低廉、功能更全的传感器及组合系统应用于实际的道路与轨道检测与测量。
| [1] | 李德仁. 展望大数据时代的地球空间信息学[J]. 测绘学报, 2016, 45(4): 379–384. LI Deren. Towards Geo-spatial Information Science in Big Data Era[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(4): 379–384. DOI:10.11947/j.AGCS.2016.20160057 |
| [2] | 葛纪坤, 万宏德, 李军吉. 精密工程测量的发展与展望[J]. 地理空间信息, 2015(1): 155–156. GE Jikun, WAN Hongde, LI Junji. Development and Prospect of Precision Engineering Surveying[J]. Geospatial Information, 2015(1): 155–156. |
| [3] | 王丹. 工程测量的发展与需求[J]. 测绘通报, 2003(4): 18–21. WANG Dan. Engineering Surveying:Development and Demands[J]. Bulletin of Surveying and Mapping, 2003(4): 18–21. DOI:10.3969/j.issn.0494-0911.2003.04.006 |
| [4] | 李清泉, 毛庆洲. 车载道路快速检测与测量技术研究[J]. 交通信息与安全, 2009, 27(1): 7–10. LI Qingquan, MAO Qingzhou. Land-borne Pavement Rapid Test and Measurement[J]. Journal of Transport Information and Safety, 2009, 27(1): 7–10. |
| [5] | 张德津, 李清泉. 公路路面快速检测技术发展综述[J]. 测绘地理信息, 2015, 40(1): 1–8. ZHANG Dejin, LI Qingquan. A Review of Pavement High Speed Detection Technology[J]. Journal of Geomatics, 2015, 40(1): 1–8. |
| [6] | 王刚. 路面病害光学无损检测技术——基于超小波与分形理论的算法研究[D]. 南京: 南京理工大学, 2007. WANG Gang. The Optical Nondestructive Examination for Pavement Distress-Algorithm Research Based on Super Wavelet and Multifractal Theorem[D]. Nanjing:Nanjing University of Science and Technology, 2007. http://d.wanfangdata.com.cn/Thesis/Y1154898 |
| [7] | 王泉. 北斗卫星通信授时系统设计及应用[D]. 西安: 西北大学, 2009. WANG Quan. Design and Application of Beidou Satellite Communication Time Service System[D]. Xi'an:Northwestern University, 2009. http://cdmd.cnki.com.cn/Article/CDMD-10697-2009088115.htm |
| [8] | CHEN Qijin, NIU Xiaoji, ZHANG Quan, et al. Railway Track Irregularity Measuring by GNSS/INS Integration[J]. Navigation, 2015, 62(1): 83–93. DOI:10.1002/navi.v62.1 |
| [9] | 李清泉, 毛庆洲, 高庆武, 等. 高精度时空数据获取的多传感器集成同步控制方法和系统: 中国, CN101949715A[P]. 2011-01-19. LI Qingquan, MAO Qingzhou, GAO Qingwu, et al. Multi-sensor Integrated Synchronous Control Method and System for High-precision Time-space Space Data Acquisition:China, CN101949715A[P]. 2011-01-19. http://d.wanfangdata.com.cn/Patent_CN201010252860.6.aspx |
| [10] | LI Qingquan, LIU Yong, MAO Qingzhou, et al. Data Acquisition, Analysis and Applications of Multi-sensor Integration[J]. Engineering Sciences, 2010, 8(1): 2–10. |
| [11] | 毛庆洲. 车载道路快速检测与测量关键技术研究[D]. 武汉: 武汉大学, 2008. MAO Qingzhou. Research on Key Technique of Land-borne based Pavement Rapid Test and Measurement[D]. Wuhan:Wuhan University, 2008. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jtjs200901002&dbname=CJFD&dbcode=CJFQ |
| [12] | 张亮. 地面复杂环境下移动三维测量精度改善方法研究[D]. 武汉: 武汉大学, 2015. ZHANG Liang. Accuracy Improvement for Mobile Mapping in Complex Ground Environments[D]. Wuhan:Wuhan University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10486-1015306194.htm |
| [13] | MAO Qingzhou, ZHANG Liang, LI Qingquan, et al. A Least Squares Collocation Method for Accuracy Improvement of Mobile LiDAR Systems[J]. Remote Sensing, 2015, 7(6): 7402–7424. DOI:10.3390/rs70607402 |
| [14] | ZHANG Liang, MAO Qingzhou, LI Qingquan, et al. An Accuracy-Improvement Method for GPS/INS Kinematic Levelling for Use in Linear Engineering Surveying Projects[J]. Measurement, 2014, 54: 22–30. DOI:10.1016/j.measurement.2014.03.026 |
| [15] | 杨必胜, 魏征, 李清泉, 等. 面向车载激光扫描点云快速分类的点云特征图像生成方法[J]. 测绘学报, 2010, 39(5): 540–545. YANG Bisheng, WEI Zheng, LI Qingquan, et al. A Classification-oriented Method of Feature Image Generation for Vehicle-borne Laser Scanning Point Clouds[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(5): 540–545. |
| [16] | 程效军, 贾东峰, 程小龙. 海量点云数据处理理论与技术[M]. 上海: 同济大学出版社, 2014. CHENG Xiaojun, JIA Dongfeng, CHENG Xiaolong. Theory and Technology of Massive Point Cloud Data Processing[M]. Shanghai: Tongji University Press, 2014. |
| [17] | 陈利, 贾友, 张尔严. 激光雷达技术及其应用[J]. 河南理工大学学报(自然科学版), 2009, 28(5): 583–586. CHEN Li, JIA You, ZHANG Eryan. LiDAR Technology and Its Application[J]. Journal of Henan Polytechnic University (Natural Science), 2009, 28(5): 583–586. |
| [18] | 王愉龙. 公路路面裂缝三维检测技术[J]. 电子测试, 2016(7): 49–50. WANG Yulong. 3D Road Surface Cracks Detection Technology[J]. Electronic Test, 2016(7): 49–50. |
| [19] | 赵海伟. 路面裂缝三维检测算法研究[D]. 西安: 长安大学, 2015. ZHAO Haiwei. The Research on 3D Pavement Crack Detection Algorithm[D]. Xi'an:Chang'an University, 2015. http://d.g.wanfangdata.com.cn/Thesis_D748127.aspx |
| [20] | 李清泉, 毛庆洲, 熊智敏, 等. 基于深度和灰度图像的路面裂缝检测装置和方法: 中国, CN104005325A[P]. 2014-08-27. LI Qingquan, MAO Qingzhou, XIONG Zhimin, et al. Pavement Crack Detecting Device and Method Based on Depth and Gray Level Images:China, CN104005325A[P]. 2014-08-27. |
| [21] | 李清泉, 毛庆洲, 靳华中, 等. 融合影像梯度信息和分水岭方法的裂缝检测方法: 中国, CN104008553B[P]. 2017-03-22. LI Qingquan, MAO Qingzhou, JIN Huazhong, et al. Crack Detection Method with Image Gradient Direction Histogram and Watershed Method Conflated:China, CN104008553B[P]. 2017-03-22. |
| [22] | 刘瑶. 基于激光雷达的三维典型地面目标识别技术研究[D]. 武汉: 华中科技大学, 2011. LIU Yao. Study of Typical Three-Dimensional Ground Target Recognition Based on Laser Radar[D]. Wuhan:Huazhong University of Science and Technology, 2011. http://cdmd.cnki.com.cn/Article/CDMD-10487-1012012868.htm |
| [23] | 蔚晓丹. 国际平整度指数IRI作为路面平整度评价指标的研究[J]. 公路交通科技, 1999, 16(S1): 9–13. WEI Xiaodan. Research on the International Roughness Index (IRI) as the Pavement Roughness Index[J]. Journal of Highway and Transportation Research and Development, 1999, 16(S1): 9–13. |
| [24] | 毛庆洲, 叶浩, 丁诗雄, 等. 基于小波变换的路面平整度自适应提取算法[J]. 中国公路学报, 2015, 28(10): 11–17. MAO Qingzhou, YE Hao, DING Shixiong, et al. Adaptive Extraction Algorithm of Pavement Roughness Based on Wavelet Transformation[J]. China Journal of Highway and Transport, 2015, 28(10): 11–17. |
| [25] | 李清泉, 雷波, 毛庆洲, 等. 利用激光三角法进行快速车辙检测[J]. 武汉大学学报(信息科学版), 2010, 35(3): 302–307. LI Qingquan, LEI Bo, MAO Qingzhou, et al. A Fast Method for Pavement Ruts Measuring with Laser Triangulation[J]. Geomatics and Information Science of Wuhan University, 2010, 35(3): 302–307. |
| [26] | 张德津, 李清泉, 何莉. 一种新的激光车辙深度测量方法研究[J]. 光学学报, 2013, 33(1): 115–121. ZHANG Dejin, LI Qingquan, HE Li. A New Method for Laser Rut Depth Measurement[J]. Acta Optica Sinica, 2013, 33(1): 115–121. |
| [27] | LI Qingquan, ZOU Qin, MAO Qingzhou, et al. Efficient Calibration of a Laser Dynamic Deflectometer[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(4): 806–813. DOI:10.1109/TIM.2013.2240932 |
| [28] | 张德津. 基于路面变形速度的弯沉测量方法[D]. 武汉: 武汉大学, 2012. ZHANG Dejin. Deflection Measurement Method Based on the Velocities of Pavement Deflections[D]. Wuhan:Wuhan University, 2012. http://d.wanfangdata.com.cn/Periodical_shjtdxxb201502014.aspx |
| [29] | ZOU Qin, CAO Yu, LI Qingquan, et al. CrackTree:Automatic Crack Detection from Pavement Images[J]. Pattern Recognition Letters, 2012, 33(3): 227–238. DOI:10.1016/j.patrec.2011.11.004 |
| [30] | LI Qingquan, ZOU Qin, ZHANG Daqiang, et al. FoSA:F* Seed-Growing Approach for Crack-Line Detection from Pavement Images[J]. Image and Vision Computing, 2011, 29(12): 861–872. DOI:10.1016/j.imavis.2011.10.003 |
| [31] | 李清泉, 胡庆武. 基于图像自动匀光的路面裂缝图像分析方法[J]. 公路交通科技, 2010, 27(4): 1–5, 27. LI Qingquan, HU Qingwu. A Pavement Crack Image Analysis Approach Based on Automatic Image Dodging[J]. Journal of Highway and Transportation Research and Development, 2010, 27(4): 1–5, 27. |
| [32] | 李清泉, 邹勤, 毛庆洲. 基于最小代价路径搜索的路面裂缝检测[J]. 中国公路学报, 2010, 23(6): 28–33. LI Qingquan, ZOU Qin, MAO Qingzhou. Pavement Crack Detection Based on Minimum Cost Path Searching[J]. China Journal of Highway and Transport, 2010, 23(6): 28–33. |
| [33] | 邹勤, 李清泉, 毛庆洲, 等. 利用目标点最小生成树的路面裂缝检测[J]. 武汉大学学报(信息科学版), 2011, 23(6): 71–75. ZOU Qin, LI Qingquan, MAO Qingzhou, et al. Target-Points MST for Pavement Crack Detection[J]. Geomatics and Information Science of Wuhan University, 2011, 23(6): 71–75. |
| [34] | LI Qingquan, ZHANG Dequan, ZOU Qin, et al. 3D Laser Imaging and Sparse Points Grouping for Pavement Crack Detection[C]//25th European Signal Processing Conference (EUSIPCO). 2017. |
| [35] | ZHANG Dejin, LI Qingquan, CHEN Ying, et al. An Efficient and Reliable Coarse-to-fine Approach for Asphalt Pavement Crack Detection[J]. Image and Vision Computing, 2017, 57: 130–146. DOI:10.1016/j.imavis.2016.11.018 |
| [36] | 李清泉, 刘向龙. 路面裂缝影像几何特征提取算法[J]. 中国科技论文在线, 2007, 2(7): 517–522. LI Qingquan, LIU Xianglong. An Algorithm to Image-based Pavement Cracks Geometry Features Extraction[J]. Sciencepaper Online, 2007, 2(7): 517–522. |
| [37] | 刘向龙, 李清泉. 基于金字塔结构的海量路面影像破损统计模型[J]. 武汉大学学报(信息科学版), 2008, 33(4): 430–432, 436. LIU Xianglong, LI Qingquan. A Pyramid-based Cracks Statistical Modal for Massive Pavement Images[J]. Geomatics and Information Science of Wuhan University, 2008, 33(4): 430–432, 436. |
| [38] | 冯超. 接触轨几何参数高精度动态测量方法研究[D]. 成都: 西南交通大学, 2014. FENG Chao. Study of the High Precision Dynamic Measurement Method of Contact Rail Geometric Parameters[D]. Chengdu:Southwest Jiao Tong University, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10613-1014257566.htm |
| [39] | 毛庆洲. 铁路弹条扣件紧固状态自动检查方法及其装置: 中国, CN103061219A[P]. 2013-04-24. MAO Qingzhou. Method and Device for Automatically Checking Fastening States of Railway Fasteners And Spring Fasteners:China, CN103061219A[P]. 2013-04-24. |
| [40] | 吴梦, 陈建政, 林森. 基于图像处理的轨道扣件状态检测[J]. 信息与电脑, 2013(1): 46–47. WU Meng, CHEN Jianzheng, LIN Sen. Track Fastener State Detection Based on Image Processing[J]. China Computer & Communication, 2013(1): 46–47. |
| [41] | 张利斌. 基于结构光技术的高速铁路道岔三维检测及应用研究[D]. 成都: 西南交通大学, 2016. ZHANG Libin. Research on 3D Detection and Application of High-speed Railway Turnout Based on Structured Light Technology[D]. Chengdu:Southwest Jiao Tong University, 2016. http://d.g.wanfangdata.com.cn/Thesis_Y3039122.aspx |
| [42] | 王旺华, 毛庆洲, 熊智敏. 钢轨几何尺寸自动测量系统研究[J]. 中国铁道科学, 2012, 33(S1): 117–121. WANG Wanghua, MAO Qingzhou, XIONG Zhimin. Research on the Automatic Measurement System for Rail Physical Dimension[J]. China Railway Science, 2012, 33(S1): 117–121. |
| [43] | 徐其瑞, 许建明, 黎国清. 轨道检查车技术的发展与应用[J]. 中国铁路, 2005(9): 37–39. XU Qirui, XU Jianming, LI Guoqing. Development and Application of the Technology of Track Inspection Car[J]. Chinese Railways, 2005(9): 37–39. |