


2. 航天泰坦科技股份有限公司, 北京 100070
2. Aerospace TITAN Technology Co., LTD, Beijing 100070, China
海岸带及海岛(礁)影像水边线提取,是利用遥感影像获取海洋地理信息的基础,通过其得到的水边线专题图则是海岸演化状况分析和海岸综合管理的关键数据[1-2]。水边线提取是海岸线提取的关键问题,对于遥感影像上航行方位物和航行目标的检测与提取[3-4]也具有重要意义。目前,遥感影像水边线提取的方法很多,常用的智能化提取方法有阈值分割法[5]、边缘检测法[2]、活动轮廓模型法[6-8]、水平截集法[1]、区域生长法[9]等。阈值分割法实现简单,处理速度快,但仅适合于分割的水体与背景有强烈对比度的图像;边缘检测法提取的水边线位置准确,但检测的边缘容易中断,通常还需要进行后续的边缘处理;活动轮廓模型法总体分割精度高,但是单一的活动轮廓模型,存在对初始轮廓敏感、灰度不均影像分割不准确等问题;水平截集法抗噪能力强,曲线的拓扑变化自适应性好,但算法复杂,检测速度比较慢;区域生长法能够得到完整的水边线,但抗噪性能较差,种子点附近个别像元灰度值的突然变化极易造成水边线的偏移[10]。现有的水边线提取方法主要存在以下3个方面的不足[7, 11-12]:第一,对于灰度变化不明显的弱边缘水边线提取不准确;第二,对于边界复杂的水边线,特别是严重凹陷情况下的水边线不容易正确提取;第三,需要人工选取种子区域,自动化程度低,效率不高。因此,难以满足后续研究和自动测图的需求。
近年来,活动轮廓模型在图像分割领域得到了广泛的应用[8-12],按驱动力的不同可以分为基于边界的和基于区域的模型。基于边界的活动轮廓模型一般是利用图像梯度来构造边界停止函数,从而保证在目标边界处轮廓停止演化,但是由于这种方法利用的是梯度信息,对梯度变化不明显的弱边界,演化很难准确地在目标轮廓处停止[13],测地线活动轮廓(GAC)模型[10]就是一种最典型的基于边界的活动轮廓模型。基于区域的活动轮廓模型,其轮廓演化的驱动力是根据图像的区域统计信息进行构造,因而对梯度变化不明显的弱边界目标或者离散状的边界目标分割效果较好[13],Chan-Vese(CV)模型[12]是一种典型的基于区域的活动轮廓模型,该模型对轮廓的初始化不敏感,但是不能处理灰度不均匀图像。文献[14-15]提出了区域可变的活动轮廓(LBF)模型,该模型克服了CV模型不能分割灰度不均匀图像的缺点,但是需要进行多次卷积计算,计算量大,且对轮廓的初始化比较敏感。在此基础上,国内外学者开始将梯度信息和区域统计信息相结合[16]、将局部统计信息和全局统计信息[17]相结合,进行优势互补,并取得了较好的分割效果。许多学者将活动轮廓模型引入到水边线提取,文献[6]提出了一种四叉树和几何活动轮廓模型相结合的自动海陆影像分割方法,实现了海陆影像的自动快速分割,但是弱边缘分割效果不理想;文献[7]提出了一种基于Canny边缘检测和GAC模型的水边线提取方法,该方法对弱边缘提取效果较好,并且能够提取严重凹陷边缘的水边线,但是需要人工选取种子区域,自动化程度较低,分割时间较长。文献[8]提出了一种四叉树和测地线活动轮廓模型相结合的海陆影像分割方法,不仅实现了自动快速提取,同时对弱边缘和严重凹陷边缘水边线能够准确提取,是目前最新公开发表的水边线提取效果非常好的一种方法,但在有浪花干扰的情况下,提取边缘与实际边缘仍然会存在较大偏差。
通过对以上方法的分析,在对GAC、CV、LBF模型研究的基础上,本文提出一种四叉树和多种活动轮廓模型相结合的遥感影像水边线提取算法,该方法对包括弱边缘和严重凹陷边缘水边线的情况均能够自动准确提取,并且提取速度较快,稳定性较好。
1 基于四叉树和多种活动轮廓模型的水边线提取原理 1.1 基于四叉树的海陆影像分割对于海陆遥感影像,海域部分的像素灰度值具有一定的均匀性,并且连通性较好,但是整体上灰度分布呈现出不均匀性,相对于海域来说,影像整体上边缘特征丰富,特别是在海陆分界处。根据这一特征,海域部分的梯度会相对较小,而海陆分界处的梯度会相对较大,因此为了便于后续分割,先构建影像梯度图,如式(1)所示[6]
 (1)
(1)
四叉树分割的实质是区域的分裂与合并技术和四叉树的结构相结合,来实现图像分割。分割原理如图 1所示[6],其优势在于分割速度快,并且是自动分割,但是对于弱边缘和严重凹陷边缘不能准确地提取。

|
| 图 1 四叉树分割结构示意图 Fig. 1 Structure diagram for quadtree segmentation |
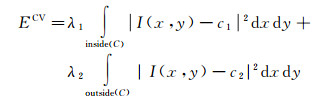
1.2 CV模型、LBF模型和GAC模型 1.2.1 CV模型
CV模型的能量函数为[12]
 (2)
(2)
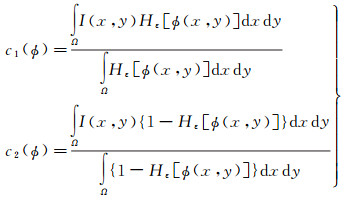
式中,I(x, y)表示原图像;λ1、λ2是值为正的常数,一般情况下可以取λ1=λ2=1;c1和c2分别为轮廓曲线内外的图像灰度均值,其计算公式如下
 (3)
(3)
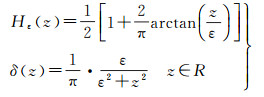
式中,Hε(Φ(x, y)为Heaviside函数的正则化形式,计算公式如式(5)所示;Φ(x, y)为水平集函数。
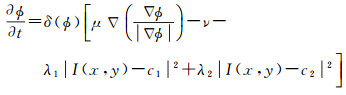
为了避免最后的分割结果中出现较小和孤立区域以及零水平集的光滑,引入长度惩罚项和面积惩罚项,得到水平集演化方程为
 (4)
(4)
式中,μ是大于0的常数;ν一般取为0;▽为梯度算子;δ(Φ(x, y))为Dirac函数的正则化形式,计算公式如式(5)
 (5)
(5)
CV模型是一种基于区域的活动轮廓模型,可以检测梯度变化不明显的弱边界目标[10]。同时,CV模型利用图像的全局信息,因此对轮廓的初始化不敏感,并且对含噪声图像能够有效地处理。但是,因为该模型将图像看作两个常值区域,所以不能处理灰度不均匀的图像。
1.2.2 LBF模型LBF模型的能量函数为
 (6)
(6)
式中,I:Ω→R为输入图像;λ1、λ2是值为正的常数;Kσ是标准差为σ的高斯核函数;f1、f2分别为拟合轮廓内外图像局部区域灰度的函数,其表达式为
 (7)
(7)
为了保持演化的稳定性以及平滑性,通常引入长度和符号距离约束,进行水平集演化。LBF模型利用了图像的局部信息,因此对于灰度不均图像具有很好的分割效果;但是只有局部信息,而没有涉及全局信息,所以对初始轮廓敏感,抗噪性能较差,并且计算量大,因此限制了该模型在实际中的应用。
1.2.3 GAC模型GAC模型是通过最小化如下能量函数
 (8)
(8)
式中,C(q)是参数化的曲线;g是边界停止函数。
通常为了增加轮廓法方向上的演变速度,增加一个常数项α,采用水平集思想最小化式(8),得到水平集演化方程为
 (9)
(9)
式中,div为散度算子。
GAC模型依靠边缘梯度信息演化曲线,能够自适应地处理拓扑结构变化,提供高精度的闭合分割曲线,但是对噪声敏感,需要人工给定初始轮廓,对于严重凹陷边缘容易陷入局部极小值而停止演化,影响提取的精度和可靠性[16],如图 2所示。

|
| 图 2 GAC模型局部极小值问题 Fig. 2 Local minimum value problem of GAC model |
当α较小时,分割曲线未到达凹陷边缘处便提前停止演变,但当α过大时,轮廓越过强边缘的可能性又会增加,因此无法实现弱边缘和严重凹陷边缘的同时提取。
1.3 基于四叉树和多种活动轮廓模型的水边线提取上述模型各有优势和不足,如何相互结合,取长补短,更好地共同完成影像分割是近年来研究的热点和难点。文献[16]利用CV模型改进符号压力函数代替GAC模型的边界停止函数,这样的改进使得分割目标更加突出,弱边缘和灰度不均匀目标分割问题可得到有效改善,并且具有双向演化曲线的能力:当演化曲线在目标内部时,曲线向外演化;当演化曲线在目标外部时,曲线向内演化,最终到达目标边界。符号压力函数对曲线演化的影响如图 3所示。

|
| 图 3 符号压力函数对曲线演化的影响 Fig. 3 The influence of signed pressure force function on curve evolution |
水平集演化方程如式(10)
 (10)
(10)
式中,spf(I)为符号压力函数。
文献[18]利用LBF模型的局部区域统计信息改进符号压力函数,提出了一种新的区域活动轮廓模型。考虑到CV模型对灰度不均的图像无法进行分割;而LBF模型对于灰度不均匀图像分割效果好。因此本文结合CV和LBF模型的优点构造新的符号压力函数
 (11)
(11)
式中,w(0≤w≤1)是一个权重因子,由经验确定,可以根据图像的细节和灰度不均匀性进行调节。当图像细节较多或者灰度不均匀时,w的值应该足够的小,可设为0.1;反之,应该设置为较大的值,通常w设为0.7,便可较好实现边缘提取。改进后的符号压力函数,使得分割目标更加突出,并且具有双向演化的能力,从而有效地改善了GAC模型无法同时提取弱边缘和严重凹陷边缘水边线的问题。因此这种方法构造的符号压力函数在水平集演化时,既保持了全局信息的优势,避免演化轮廓线达到局部最小,同时又保持了局部信息的优势,对灰度不均匀图像的分割效果较好[16]。
式(10)中,div(▽Φ/▽Φ)|▽Φ|是一个规则化项,其作用是规则化水平集函数Φ。因为水平集函数是一种符号距离函数并且满足|▽Φ|=1,那么该规则化项满足div(▽Φ/|▽Φ|)|▽Φ|=▽Φ[19],说明该规则化项可用水平集函数Φ的拉普拉斯表示。根据文献[20]所述以及尺度空间理论,若一个演化函数按拉普拉斯方式演化,其效果可以等同于用高斯核函数对其初始轮廓进行滤波。因此,在实现时可以用高斯滤波代替该规则化项,因此式(10)的div(▽Φ/|▽Φ|)|▽Φ|可以省略。水平集演化的重新初始化一直都是水平集方法的一个难点,为了保证轮廓演化的准确性,重新初始化被应用于水平集方法中[10],但是理论与实际的数值实现存在着误差,重新初始化可能使得零水平集偏离原始位置,并且计算量大,效率低。此外,很难决定什么时候、怎样进行初始化。文献[17]提出的二值选择和高斯滤波正则化的水平集方法,避免了重新初始化[21],节省了初始化所耗费的时间,效率得以大幅提高。由于本文方法采用了具有更广泛的目标边界捕获范围的区域统计信息,故式(10)中的spf(I)|▽Φ|也可以省略,因此,最后的演化方程为
 (12)
(12)
通过上述的分析可知,基于四叉树的图像分割算法分割速度快,自动化程度高,但是对于弱边缘和严重凹陷边缘的分割不够准确,因此本文先采用四叉树粗分割给定初始轮廓,再利用多种活动轮廓模型细分割得到精确结果的思路。不仅能够准确提取一般的水边线,同时对包括弱边缘和严重凹陷边缘的水边线也能很好提取。
基于四叉树和多种活动轮廓模型的水边线提取算法流程如图 4所示。

|
| 图 4 水边线提取流程 Fig. 4 Flowchart for waterline extraction |
2 试验结果与分析
为了验证本文提出的算法有效性,进行了多组试验,并与其他3种水边线提取方法进行了比较分析。现列出以下6组试验,为定量分析4种方法的提取效率,分别从提取精度、迭代次数、运行时间和提取准确率4个方面进行了统计和验证。在提取准确率方面,利用线特征提取广泛使用的评价方法进行定量评价分析,将各算法提取的水边线与人工提取(或实际)水边线进行比较,采用完整性(CP)、正确率(CR)、提取质量(QL)3个指标对提取结果准确性进行评价,计算方法参考文献[22]。试验1利用标准边缘模拟影像验证本文算法的亚像素提取精度;试验2是利用QuickBird影像对本文算法进行验证;试验3—试验6是利用天绘卫星全色和多光谱影像对本文算法进行验证,并与文献[6-8]提出的水边线提取方法进行对比试验。
2.1 标准边缘模拟影像试验为了简单、准确地评价本文算法的提取精度,试验1采用已知提取结果的标准边缘模拟影像进行了验证。以CCD成像原理为基础,根据方形孔径采样定理生成理想阶跃状边缘[23],分别对倾斜角为10°、15°、35°、45°、60°、75°的6幅标准边缘影像进行试验,影像大小为201×201像素,试验结果如图 5所示,图 5(a)—图 5(f)分别是利用本文方法对按文献[23]方法生成的上述6幅标准影像边缘提取的结果。提取精度利用文献[24]的方法进行定量计算,即以所提取的各边缘点与理论边缘直线的距离平均值来度量提取精度,本文方法对不同倾斜角的标准边缘影像提取精度见表 1。

|
| 图 5 试验1亚像素提取精度验证 Fig. 5 Accuracy verification for sub-pixel extraction in experiment $$ |
| 倾斜角度/(°) | 10 | 15 | 35 | 45 | 60 | 75 |
| 提取精度/像素 | 0.054 | 0.025 | 0.036 | 0.041 | 0.043 | 0.041 |
从表 1和图 5可知,本文方法的提取精度可达0.1像素以内,说明了本文算法提取的精度达到了亚像素级。对理想的屋顶型和线条型边缘也进行了相关试验,均证明本文算法可达到亚像素级的提取精度。
2.2 QuickBird影像试验试验2采用2014年获取的大连地区的QuickBird卫星影像作为试验数据,分辨率为0.61 m,大小为1173×719像素,四叉树分割试验结果如图 6所示。本试验主要针对本文算法的运行效率、弱边缘、严重凹陷边缘水边线提取能力进行对比试验。试验结果如图 7所示,图 7(a)—图 7(c)分别为原始影像和弱边缘、凹陷边缘选区;图 7(d)—图 7(f)分别为文献[6]方法对原始影像、弱边缘和凹陷边缘提取结果;图 7(g)—图 7(i)分别为文献[7]方法对原始影像、弱边缘和凹陷边缘提取结果;图 7(j)—图 7(l)分别为文献[8]方法对原始影像、弱边缘和凹陷边缘提取结果。图 7(m)—图 7(o)分别为本文方法对原始影像、弱边缘和凹陷边缘提取结果。

|
| 图 6 四叉树分割结果 Fig. 6 Results of quad-tree segmentation |

|
| 图 7 试验2各算法水边线提取结果 Fig. 7 Results of waterline extraction in experiment 2 |
由图 6可以看出,四叉树分割所获得的轮廓非常接近于真实水边线,为水平集演化提供了精确的初始轮廓,减少了演化的次数,提高了演化的效率。由图 7第2列试验结果可以看出,文献[6-8]所述方法在有浪花干扰的情况下,提取边缘与实际边缘相差较大,提取结果不准确,并且严重凹陷边缘水边线提取的能力也较差;而本文方法在有浪花干扰的情况下效果较好,提取结果更接近实际边缘,并且对严重凹陷边缘能够准确提取。同时,提取效率明显高于文献[6-8]所述方法,运行效率和提取准确率统计情况见表 2。
2.3 天绘一号卫星影像试验
试验3采用2013年获取的大连地区的天绘卫星影像作为试验数据,大小为498×427像素,分辨率为2 m,本试验主要针对本文算法的运行效率、一般水边线提取准确性进行对比试验。试验结果如图 8所示,图 8(a)为原始影像,图 8(b)—图 8(d)分别为文献[6-8]方法和本文方法对原始影像的提取结果;图 8(e)为选区放大影像,图 8(f)—图 8(h)分别为文献[6-8]方法和本文方法选区放大的提取结果。运行效率和提取准确率统计结果见表 3。

|
| 图 8 试验3一般水边线提取结果 Fig. 8 Results of general waterline extraction in experiment 3 |
试验4采用2013年获取的大连地区的天绘卫星影像作为试验数据,大小为811×639像素,分辨率为2 m,本试验主要针对本文算法的运行效率、严重凹陷水边线提取准确性进行对比试验。试验结果如图 9所示,图 9(a)为原始影像,图 9(b)—图 9(d)分别为文献[6-8]方法和本文方法对原始影像的提取结果;图 9(e)为选区放大影像,图 9(f)—图 9(h)分别为文献[6-8]方法和本文方法选区放大的提取结果。运行效率和提取准确率统计结果见表 4。

|
| 图 9 严重凹陷边缘水边线提取结果 Fig. 9 Experimental results of waterline extraction for concave edges |
试验5采用2013年获取的大连地区的天绘卫星影像作为试验数据,大小为859×710像素,分辨率为2 m,本试验主要针对本文算法的运行效率、弱边缘水边线提取准确性进行对比试验。试验结果如图 10所示,图 10(a)为原始影像,图 10(b)—图 10(d)分别为文献[6-8]方法和本文方法对原始影像提取结果;图 10(e)为选区放大影像,图 10(f)—图 10(h)为文献[6-8]方法和本文方法选区放大的提取结果。运行效率和提取准确率统计结果见表 5。

|
| 图 10 弱边缘水边线提取结果 Fig. 10 Experimental results of waterline extraction for weak edges |
试验6采用天绘卫星多光谱影像作为试验数据,大小为980×588像素,分辨率为10 m,本试验主要针对多光谱影像进行对比试验。试验结果如图 11所示,图 11(a)为原始影像,图 11(b)—图 11(d)分别为文献[6-8]方法和本文方法对原始影像提取结果;图 11(e)为选区放大影像,图 11(f)—图 11(h)为文献[6-8]方法和本文方法选区放大的提取结果。运行效率和提取准确率统计结果见表 6。
从图 8—图 11也可以看出,本文方法可以较准确地提取水边线,特别是对于弱边缘和严重凹陷边缘水边线也能准确地得到提取,稳定性强,无需人工选择种子点或初始边界,自动化程度高。由表 3—表 6可以看出,从迭代次数和运行时间两方面来看,本文方法的运行效率明显高于文献[6-7]所述的方法,提高效率可达4倍以上;从提取准确率方面来看,从提取完整性、准确性和提取质量3个指标可以看出,本文方法整体提取准确率较高。

|
| 图 11 多光谱影像水边线提取结果 Fig. 11 Experimental results of multispectral image waterline extraction |
通过对上述6组试验结果的分析,可以得到:①本文利用四叉树分割为曲线演化提供初始轮廓,实现了演化的自动化;②结合GAC、CV、LBF模型的优势构造的符号压力函数具有双向演化的能力,从而有效地改善了GAC模型无法同时提取弱边缘和严重凹陷边缘水边线的问题,保持了全局信息的优势,避免演化轮廓线达到局部最小,同时又保持了局部信息的优势,对灰度不均匀图像的分割效果较好;③最后采用二值选择和高斯滤波正则化水平集方法(SBGFRLS)进行演化,避免了重新初始化和规则化,提高了水平集演化的效率,因此较之其他提取方法在效率和精度方面都更有优势;④缺点是构造的符号压力函数中的权重因子由经验决定,需要根据图像的细节和灰度不均匀性进行调节。
3 结论针对遥感影像水边线提取中弱边缘和严重凹陷边缘水边线难以准确提取、提取时间长以及自动化程度低等问题,本文提出了一种四叉树和多种活动轮廓模型相结合的水边线提取方法。试验结果表明:该方法对于包括弱边缘、严重凹陷边缘的水边线均能够准确提取,并且具有亚像素提取精度;利用效率较高的四叉树分割方法获取水边线的初始轮廓,无需人工干预,自动化程度高;通过引入四叉树分割,改进符号压力函数以及采用高斯卷积核规则化水平集函数避免了重新初始化,极大地提高了水边线提取的效率。由于本文算法采用Matlab编程实现,所处理的影像大小有限,对于更大图像的处理需要考虑分块或其他的图像处理方法,今后将会进一步作深入研究。
| [1] | RYU J H, WON J S. Application of Neural Networks to Waterline Extraction in Tidal Flat from Optic Satellite Images[C]//IEEE International Geoscience and Remote Sensing Symposium (IGARSS). Toronto, Ont: IEEE, 2002, 4: 2026-2028. |
| [2] | QIN Ping. Waterline Information Extraction from Radial Sand Ridge of South Yellow Sea[C]//Proceedings of the 6th International Congress on Image and Signal Processing (CISP). Hangzhou: IEEE, 2013: 459-463. |
| [3] | LI Heng, WANG Xinyu. Automatic Recognition of Ship Types from Infrared Images Using Support Vector Machines[C]//Proceedings of the International Conference on Computer Science and Software Engineering. Wuhan, Hubei: IEEE, 2008, 6: 483-486. |
| [4] | 汪闽, 骆剑承, 明冬萍. 高分辨率遥感影像上基于形状特征的船舶提取[J]. 武汉大学学报(信息科学版) , 2005, 30 (8) : 685–688. WANG Min, LUO Jiancheng, MING Dongping. Extract Ship Targets from High Spatial Resolution Remote Sensed Imagery with Shape Feature[J]. Geomatics and Information Science of Wuhan University , 2005, 30 (8) : 685 –688. |
| [5] | LI Zhen, LIU Yongxue, LI Manchun, et al. Automatic Waterline Pick-up Based on Improved Embedded Confidence[C]//Proceedings of the 18th International Conference on Geoinformatics. Beijing: IEEE, 2010: 1-6. |
| [6] | ZHANG Hongwei, ZHANG Baoming, GUO Haitao. An Automatic Coastline Extraction Method Based on Active Contour Model[C]//Proceedings of the 21st International Conference on Geoinformatics. Kaifeng: IEEE, 2013, 6: 111-115. |
| [7] | 申家双, 郭海涛, 李海滨, 等. 基于Canny算子和GAC模型相结合的影像水边线提取方法[J]. 测绘科学技术学报 , 2013, 30 (3) : 264–268. SHEN Jiashuang, GUO Haitao, LI Haibin, et al. A Water Edge Extraction Method from Images Based on Canny Operator and GAC Model[J]. Journal of Geomatics Science and Technology , 2013, 30 (3) : 264 –268. |
| [8] | 郭海涛, 孙磊, 申家双, 等. 一种四叉树和测地线活动轮廓模型相结合的海陆影像分割方法[J]. 测绘学报 , 2016, 45 (1) : 65–72. GUO Haitao, SUN Lei, SHEN Jiashuang, et al. An Island and Coastal Image Segmentation Method Based on Quadtree and GAC Model[J]. Acta Geodaetica et Cartographica Sinica , 2016, 45 (1) : 65 –72. DOI:10.11947/j.AGCS.2016.20150240 |
| [9] | 谢明鸿, 张亚飞, 付琨. 基于种子点增长的SAR图像海岸线自动提取算法[J]. 中国科学院研究生院学报 , 2007, 24 (1) : 93–98. XIE Minghong, ZHANG Yafei, FU Kun. Algorithm of Detection Coastline from SAR Images Based on Seeds Growing[J]. Journal of the Graduate School of the Chinese Academy of Sciences , 2007, 24 (1) : 93 –98. |
| [10] | 申家双. 海岸带等水位线信息提取与垂直基准转换技术研究[D]. 郑州: 信息工程大学, 2008. SHEN Jiashuang. Research on Technology of Equal Waterline Information Extraction and Vertical Datum Transformation in Coastal Zone[D]. Zhengzhou: Information Engineering University, 2008. |
| [11] | 王晓峰.水平集方法及其在图像分割中的应用研究[D].合肥:中国科学技术大学, 2009. WANG Xiaofeng. The Study of Level Set Methods and Their Applications in Image Segmentation [D]. Hefei: University of Science and Technology of China, 2009. |
| [12] | CHAN T F, VESE L A. Active Contours without Edges[J]. IEEE Transactions on Images Processing , 2001, 10 (2) : 266 –277. DOI:10.1109/83.902291 |
| [13] | LI Chunming, KAO C Y, GORE J C, et al. Implicit Active Contours Driven by Local Binary Fitting Energy[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Minneapolis, MN: IEEE, 2007: 1-7. |
| [14] | LI Chunming, KAO C Y, GORE J C, et al. Minimization of Region-scalable Fitting Energy for Image Segmentation[J]. IEEE Transactions on Image Processing , 2008, 17 (10) : 1940 –1949. DOI:10.1109/TIP.2008.2002304 |
| [15] | 田法, 周明全, 段福庆, 等. 结合统计和梯度信息的高效活动轮廓模型[J]. 中国图象图形学报 , 2011, 16 (8) : 1489–1496. TIAN Fa, ZHOU Mingquan, DUAN Fuqing, et al. Efficient Active Contour Model Driven by Statistical and Gradient Information[J]. Journal of Image and Graphics , 2011, 16 (8) : 1489 –1496. |
| [16] | ZHANG Kaihua, ZHANG Lei, SONG Huihui, et al. Active Contours with Selective Local or Global Segmentation: A New Formulation and Level Set Method[J]. Image and Vision Computing , 2010, 28 (4) : 668 –676. DOI:10.1016/j.imavis.2009.10.009 |
| [17] | WANG Xiaofeng, MIN Hai. A Level Set Based Segmentation Method for Images with Intensity Inhomogeneity[M]//HUANG Deshuang, JO K H, LEE H H, et al. Emerging Intelligent Computing Technology and Applications. With Aspects of Artificial Intelligence. Berlin: Springer, 2009: 670-679. |
| [18] | 苏日娜, 吴纪桃. 改进符号压力函数的区域活动轮廓模型[J]. 中国图象图形学报 , 2011, 16 (12) : 2169–2174. SU Rina, WU Jitao. Region-based Active Contour Model Improving the Signed Pressure Force Function[J]. Journal of Image and Graphics , 2011, 16 (12) : 2169 –2174. |
| [19] | OSHER S, FEDKIW R. Level Set Methods and Dynamic Implicit Surfaces[M]. New York: Springer-Verlag, 2003 : 77 . |
| [20] | SHI Yonggang, KARL W C, Real-time Tracking Using Level Sets[C]//Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA: IEEE, 2005: 34-41. |
| [21] | ZHANG Kaihua, SONG Huihui, ZHANG Lei. Active Contours Driven by Local Image Fitting Energy[J]. Pattern Recognition , 2010, 43 (4) : 1199 –1206. DOI:10.1016/j.patcog.2009.10.010 |
| [22] | 丁磊, 姚红, 郭海涛, 等. 利用邻域质心投票从分类后影像提取道路中心线[J]. 中国图象图形学报 , 2015, 20 (11) : 1526–1534. DING Lei, YAO Hong, GUO Haitao, et al. Using Neighborhood Centroid Voting to Extract Road Centerline from Classified Image[J]. Journal of Image and Graphics , 2015, 20 (11) : 1526 –1534. |
| [23] | 贺忠海, 王宝光, 廖怡白. 理想边缘产生方法的研究[J]. 光学精密工程 , 2002, 10 (1) : 89–93. HE Zhonghai, WANG Baoguang, LIAO Yibai. Study of Method for Generating Ideal Edges[J]. Optics and Precision Engineering , 2002, 10 (1) : 89 –93. |
| [24] | 陈小卫, 徐朝辉, 郭海涛, 等. 利用极值梯度的通用亚像素边缘检测方法[J]. 测绘学报 , 2014, 43 (5) : 500–507. CHEN Xiaowei, XU Zhaohui, GUO Haitao, et al. Universal Sub-pixel Edge Detection Algorithm Based on Extremal Gradient[J]. Acta Geodaetica et Cartographica Sinica , 2014, 43 (5) : 500 –507. DOI:10.13485/j.cnki.11-2089.2014.0073 |