



卫星影像在成像过程中由于受到云层遮挡,导致原地物光谱失真,影响测绘产品生产与影像判读。因此,实现生产前准确云检测具有重要的实际生产意义[1]。现有算法主要利用云的光谱、频率、纹理等特性[2-6],结合阈值法[7-9]、支持向量机法[10, 11]、聚类法[12]等进行检测。光谱结合阈值法主要利用云在可见光波段具有强反射的特性,该类算法对阈值的敏感程度较高,同一卫星数据因时间、天气等原因,检测阈值将发生巨大变化,加大了此类方法的局限性。频率结合阈值法主要利用云的低频特性,通过小波分析[13]、傅里叶变换等方法获取影像低频数据进行云检测,但由于受地面低频信息干扰,通常采用多层小波变换[14, 15]排除,这大大降低了云检测效率。纹理特征法利用云与地面纹理特征差异,常以分块子图为单位,结合二阶矩[16]、分形维数[17]、灰度共生矩阵[18-20]和多次双边滤波[21]进行纹理特征计算,该类方法需要提前获得可靠云特征区间才能保证分类的精度,效率较低。支持向量机与聚类法,需要获取大量的训练样本,对分类特征的选取要求较高,针对不同数据需要重新选取样本,导致效率低下。
本研究基于影像多通道信息,即红、绿、蓝、近红外4个波段信息,进行云检测。通过改进的HIS模型大大降低了薄云的检测难度。研究表明,云对红外波段有特殊的反射与吸收特性[15],但长期以来利用红外波段进行云检测的相关研究却较少,研究中利用近红外波段区分云与高亮的河流等地物取得了理想的效果。另外,直方图均衡化与双边滤波相结合提取影像纹理的方法,有效弥补了传统分形维数和灰度共生矩阵计算精度低、效率低下的不足。
1 影像自动云检测文中介绍的国产高分辨率遥感卫星影像自动云检测分为云层粗提取、粗差剔除、云层精提取3个关键步骤,所制定的云检测算法流程如图 1所示。

|
| 图 1 云检测流程图 Fig. 1 Flow chart of cloud detection |
RGB色彩模型对厚云检测效果较好,但难以识别薄云。为此,笔者引入HIS色彩模型,将基于笛卡儿直角坐标系的单位立方体向基于圆柱极坐标的双椎体转换[22]。卫星影像中云层R、G、B值较高且接近,色彩上表现为偏白,但在传统H通道表现为无规律状态,因此无法用于云识别。为体现云层R、G、B相似特性,文中对H通道作如下改进。
R、G、B灰度值排序
 (1)
(1)
式中,R′、G′、B′分别为R、G、B中最小值、中间值、最大值。
R′、G′、B′权值调整
 (2)
(2)
将权值调整后的R″、G″、B″代入传统公式求取色调值H。
算法改进原理如图 2所示,图 2(a)为传统HIS圆锥体模型,图 2(b)为传统H通道,图 2(c)最上层为传统H通道6等分展开及对应H范围,图 2中竖线仅代表R、G、B相对大小关系,与真实值大小无关。从图中可以发现,仅当R、G、B灰度值较为相似时,H值较小,其他情况下,H值均较大。

|
| 图 2 HIS模型改进原理 Fig. 2 Principle of HIS model improvement |
模型改进前后色调对比如图 3所示。云层R、G、B值较高且接近,集中在图中对角线附近。图 3(a)中云层色调变化区间很大,图 3(b)中云色调较小,可与其他地物明显区分。

|
| 图 3 HIS模型改进前(a)后(b)色调对比 Fig. 3 Effect of RGB to HIS model |
RGB转改进HIS模型效果如图 4所示。从改进HIS色彩模型可以发现,卫星影像中云层具有以下共同特性:

|
| 图 4 RGB转HIS模型效果 Fig. 4 Effect of RGB to HIS model |
(1) 云区受太阳光照射,反射强度较大,导致亮度、温度较高;
(2) 云层在RGB色彩空间表现为白色,因此饱和度较低;
(3) 改进HIS色彩空间下,其他偏色地物色调较大,而高亮的灰白色云层色调较小;
(4) 有云层覆盖的区域细节特征较少;
(5) 云层一般聚集存在。
1.1 云层粗提取 1.1.1 基底图厚云将光线反射入卫星传感器,因此呈现白色。薄云与地物反射光混合传入卫星传感器,给人的色彩感知是地物光谱中“掺入了白色”[23],导致原地物亮度增大,饱和度降低。将I、S线性拉伸到0至1之间转为I′、S′,并利用式(3)计算得到基底中间值
式中,I′为拉伸后亮度值;S′为拉伸后饱和度值;τ为缓冲系数,试验中取值为1.0;J′为基底中间值;将J′线性拉伸到0至255,转为基底像素值J,效果如图 5所示。

|
| 图 5 原始影像与基底图 Fig. 5 Original imageand basal figure |
1.1.2 修正图
使用Otsu阈值可大体将基底图中的云层与下垫面分割开,但往往存在分割阈值过大,薄云漏检,分割阈值过小,误检率过高等现象,试验中采用带约束的Otsu阈值能有效解决这一问题。

|
| 图 6 基底图Otsu阈值分割 Fig. 6 Otsu threshold segmentation on basal figure 注:红色部分为基底图中满足Otsu阈值对象在原图上的标记,TJ中为对应的Otsu阈值。 |
试验中,从高分一号、高分二号、资源三号等卫星影像中,选取500个云层基底图(包含薄云、厚云),统计像素灰度直方图和累积频率分布如图 7所示。

|
| 图 7 云层基底灰度直方图与累积频率分布图 Fig. 7 Gray histogram and cumulative frequency distributing graph of cloud on basal figure |
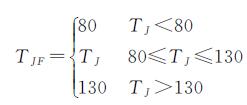
由图 7分析可知,云层基底灰度值大体分布在80至255之间,而累积频率在130处呈快速上升趋势,表征当Otsu阈值大于130,漏掉薄云的可能性随之迅速增大。因此,试验中设定基底图分割阈值范围为80至130,即按式(4)对阈值进行修正
 (4)
(4)
阈值修正前后基底图分割效果在图 8中反映。可以看出,阈值修正后,可在保证查全率前提下,有效控制误检率。

|
| 图 8 阈值修正前(a)后(b)基底图分割效果对比 Fig. 8 Compare of segmentation effects before (a)and after (b)modification of the threshold on basal figure |
利用云层在近红外波段高亮以及色调值较低的特性,排除高亮度水域以及偏色裸地等噪声,可对分割后的基底图进行修正。从图 9发现,云层近红外值IN均大于350,色调值H均小于120。因此修正图IX的生成将以以下3个条件作为依据:

|
| 图 9 云层近红外\色调\基底灰度分布图 Fig. 9 IN\H\J distributing graph of cloud |
(1) 基底值J大于TJF;
(2) 近红外值IN大于350;
(3) 色调H值小于120。
多条件分割生成的修正结果如图 10所示。

|
| 图 10 多条件分割生成修正图 Fig. 10 Modified figure generated by multi-conditions segmentation 注:红色为公共区域,绿色为仅满足色调阈值,黄色仅满足近红外阈值,蓝色为仅满足基底阈值。 |
1.2 粗差剔除
修正图中能够将厚云与薄云提取出来,但存在部分高亮度人工建筑等噪声。利用云层弱纹理特性能够有效剔除这些噪声。一般而言,云在图像上的灰度分布均匀、纹理较粗。反之,地物的纹理复杂度和灰度跳变程度较大。
1.2.1 细节图传统纹理分析法依赖于提取的特征,如分数维、灰度梯度共生矩阵等[18-20]。这类算法对航空影像处理效果较好,但卫星影像上大部分地物纹理较粗,与云层纹理特征相似,容易产生混淆。文中直方图均衡与双边滤波相结合的方法能有效克服这一难题。
对影像亮度分量I进行直方图均衡化,转为均衡化亮度图IE,可突出影像中隐含的纹理信息[16]。
双边滤波在对图像进行光滑的同时能有效保持图像边缘特征。对于卫星影像,通常进行多次双边滤波来提取纹理[21],这对计算机内存及运算能力有着极高要求。文中进行直方图均衡化有效强化了地物纹理,仅需一次双边滤波便能有效提取地物纹理。将均衡化亮度图IE按式(5)变换得到滤波影像IE′
 (5)
(5)
式中,Ωx,y表示以(i,j)为中心的M×M(M为奇数)大小的窗口。对该窗口内每一个像素点(i,j),其权重w(i,j)由两部分因子组成
 (6)
(6)
 (7)
(7)
 (8)
(8)
式中,w(i,j)为计算权重;Ws(i,j)为空间距离因子;Wr(i,j)为亮度相似度因子;σs和σr表示高斯函数标准偏差,试验中σs取值为2,σr取值为IEmax/10;IEmax表示均衡化亮度最大值;e表示数学常量;(i,j)为待滤波中心像素坐标;(i′,j′)为窗口内其他像素坐标;IE′(i,j)为双边滤波后的中心像素亮度值。通过式(9)构建细节图,I′D为细节图中像素灰度值
 (9)
(9)
亮度图均衡化以及均衡化前后细节提取效果如图 11所示。

|
| 图 11 直方图均衡化前后细节提取效果对比 Fig. 11 Compare of detail extraction effects before and after histogram equalization |
图 11(c)为图 11(a)直方图均衡化效果,可看出城区呈现明显颗粒感,突出了建筑物细节,而云层只是对比度增强。均衡化前,仅厚云中心区域粗纹理特征明显(图 11(b)),周围薄云与下垫面没有差别,而均衡化后,云区与下垫面表现出明显的差别(图 11(d))。为充分利用这一特性,本文使用带限定条件的Otsu阈值Otsu_2对细节图(图 11(d))进行分割,即在一维Otsu阈值Otsu_1基础上,将满足条件的像素作为统计数据来源,再次计算Otsu阈值,即可获取改进后的自动阈值[6]。
对图 11(d)统计细节灰度直方图如图 12(a)所示,一维Otsu阈值Otsu_1=22分割如图 12(b),采用筛选后的改进直方图如图 12(c),带限定条件Otsu阈值Otsu_2=7,分割结果如图 12(d)。试验结果表明,带限定条件的Otsu阈值在一定程度上提高了阈值适用性与检测精度。

|
| 图 12 一维和带限定条件Otsu阈值细节分割对比 Fig. 12 Compare of segmentation results for One-dimensional and Otsu threshold with condition on detail map |
1.2.2 云种子图
利用分割后的细节图ID对修正图IX进行粗差剔除,得到云种子图
 (10)
(10)
式中,IR表示云种子图;IX表示修正图;ID表示分割后细节图。效果如图 13所示。

|
| 图 13 云种子图生成 Fig. 13 Result of cloud seed figure generation 注:(a)中红色为公共区域即(b),蓝色为仅满足细节分割区域,绿色为修正图中云区域。 |
1.3 云层精检测
上述处理可准确定位云区,但往往存在边缘薄云漏检测现象。为提高云检测精度,采用边缘种子条件膨胀的方式进行精确提取。策略的思想是:首先进行迭代条件膨胀提取边缘厚云,然后进行单次条件膨胀将厚云向薄云过渡,最后再次进行迭代条件膨胀提取边缘薄云。
1.3.1 边缘厚云提取(1) 边缘种子确定。云种子图IR上,在以云像元为中心的3×3窗口内,若存在非云像元,则该云像元为边缘种子。
(2) 条件膨胀。在亮度图I上,将边缘种子与3×3窗口内各邻域点的亮度差绝对值dI=|I(i,j)-I(i′,j′)|作为判断依据,当dI小于种子亮度值的k倍,则认为该邻域点与该种子属于同类,即将该邻域判定为新增云像元。当0.8%≤k≤1.2%时,亮度差值约小于12,这在卫星影像上属于人眼不可区分值,因此试验设定k为0.8%作为条件膨胀阈值。
(3) 判断是否停止迭代。当新增云像元数小于限差T(T为经验阈值,可根据需要调整,试验中取为200),说明已收敛,停止迭代。同时为了防止过膨胀,对膨胀次数也应进行限制,当膨胀次数达到上限D(D为经验阈值,试验中设定为3),终止迭代。
1.3.2 边缘厚云向薄云过渡(1) 边缘种子确定。
(2) 条件膨胀。大量试验数据统计发现,薄云亮度值约为厚云的30%~50%。为了将边缘厚云向薄云过渡的同时保证查准率,试验中设定k为30%进行单次条件膨胀。
1.3.3 边缘薄云提取与提取边缘厚云类似,只是条件膨胀阈值k设定为上限值1.2%。这是因为薄云亮度值相对较小,分散较为稀疏,取较大k值,可避免薄云漏检。 云层精检测具体流程如图 14所示。

|
| 图 14 云层精提取流程图 Fig. 14 Flow chart of cloud accurate detection |
该处理流程能有效提高云检测精度,改善效果如图 15所示。

|
| 图 15 精检测前(a)后(b)效果对比 Fig. 15 Effects before (a) and after(b) accurate detection |
2 试验结果与分析
文中选取文献[15]中多层无抽样小波变换结合Otsu阈值方法(以下简称小波法)与文献[21]中RGB逐步优化算法(以下简称逐步法)以及文献[12, 24]半自动式云检测方法为参考。选取多幅高分一、二号、资源三号影像(影像信息如表 1所示)进行试验,并在目视效果、检测精度、运算性能上进行比较和评价。
| 影像编号 | 所属卫星 | 成像时间 | 影像波段 | 影像大小 | 地表类型 | 云层类型 |
| 0906000 | 高分一号 | 2013-09-01 | 蓝、绿、红、近红外 | 4548×4596 | 山区、城镇 | 厚、薄云 |
| 0906001 | 高分一号 | 2013-11-15 | 蓝、绿、红、近红外 | 4548×4596 | 山区、城镇 | 厚云 |
| 0906002 | 资源三号 | 2013-05-02 | 蓝、绿、红、近红外 | 8824×9307 | 山区、裸地 | 薄云 |
| 0906003 | 资源三号 | 2013-10-25 | 蓝、绿、红、近红外 | 8824×9285 | 裸地、河流 | 厚云 |
| 0906004 | 高分二号 | 2015-02-17 | 蓝、绿、红、近红外 | 12 000×13 400 | 山区、裸地 | 薄云 |
| 0906005 | 高分二号 | 2015-02-17 | 蓝、绿、红、近红外 | 12 000×13 400 | 城镇、河流 | 厚云 |
| 0906006 | 资源三号 | 2013-10-25 | 蓝、绿、红、近红外 | 20 260×16 388 | 山区、湖泊 | 厚、薄云 |
2.1 目视效果
图 16和图 17分别为本文算法与自动、半自动式云检测算法效果比较。图中黄圈内为漏检区域,蓝圈内为误检区域。

|
| 图 16 云检测算法视觉对比(Ⅰ) Fig. 16 Compare of vision for different cloud detection algorithms (Ⅰ) |

|
| 图 17 云检测算法视觉对比(Ⅱ) Fig. 17 Compare of vision for different cloud detection algorithms (Ⅱ) 注:(b)、(d)中红色代表云区,绿色代表非云区。 |
图 16为小波法、逐步法和本文方法试验结果对比。可看出,本文方法目视效果最好。第1、3幅图中,小波法将大量人工建筑、裸地误判为云,而逐步法存在薄云漏检。第2幅图中,小波法与逐步法均存在薄云漏检现象。第4幅图中,小波法将高亮度水域及裸地误判为云,逐步法存在薄云漏检,以及水域误判情况,而本文方法因加入了近红外信息,因此能够对高亮度水域进行有效排除。小波法通过获取影像低频信息来进行云检测,逐步法通过多次双边滤波提取影像纹理,但在卫星影像中,城镇与裸地均表现为低频率、弱纹理特征,容易与云层产生混淆,而较薄云层又难以与地物有效区分,导致薄云漏检。文中在提取纹理之前进行直方图均衡化,突出隐含纹理信息,有效提高了检测精度。
图 17为最大似然法、图割法和本文方法检测结果对比。最大似然提取结果中存在大量噪声,许多房屋、裸地误判为云。图割法虽然不存在斑点噪声,但是与云区相连通的区域存在过提取现象。最大似然法仅以灰度接近程度为依据,未考虑空间距离特征,导致检测出大量离散噪声。图割法加入了空间距离特征,但与目标连通的噪声区域,不能做到准确分割。本文方法除灰度信息之外,还加入了纹理信息,因此检测效果优于二者。
2.2 检测精度试验中采用手动勾画方式提取真实云图,并将查准率、查全率以及错误率作为度量标准,计算公式为
 (11)
(11)
 (12)
(12)
 (13)
(13)
式中,PR为查准率;TC为准确识别的真云像元数;FA为识别为云像元总数;RR为查全率;TA为真云像元数;ER为错误率;TF为云误判定为非云像元数;FT为非云误判定为云像元数;NA为总像元数。图 16中各算法查准率、查全率与错误率如表 2所示。
| (%) | ||||
| 影像编号 | 性能 | 小波法 | 逐步法 | 本文算法 |
| 0906000 | PR | 48.5 | 100 | 94.5 |
| RR | 94.2 | 34.8 | 85.6 | |
| ER | 11.3 | 6.9 | 2.0 | |
| 00906002 | PR | 99.0 | 99.8 | 83.7 |
| RR | 2.61 | 31.1 | 98.0 | |
| ER | 15.6 | 11.1 | 3.3 | |
| 0906004 | PR | 83.6 | 94.4 | 93.0 |
| RR | 89.3 | 77.9 | 89.4 | |
| ER | 4.6 | 4.4 | 2.8 | |
| 0906006 | PR | 84.6 | 85.4 | 98.0 |
| RR | 83.1 | 82.3 | 89.4 | |
| ER | 6.1 | 6.1 | 2.3 | |
为将本方法与人工交互式方法进行更合理的定量对比,文中引入人工率这一衡量标准,计算公式为
 (14)
(14)
式中,WR为人工率;DR为人工勾画像元数;NA为总像元数。图 17中各算法查准率、查全率、错误率及人工率如表 3所示。
| (%) | ||||
| 影像编号 | 性能 | 最大似然法 | 图割法 | 本文算法 |
| 0906001 | PR | 93.8 | 97.2 | 99.2 |
| RR | 86.3 | 85.4 | 87.8 | |
| ER | 1.5 | 1.3 | 0.8 | |
| WR | 4.0 | 3.4 | 0 | |
| 0906003 | PR | 97.5 | 87.1 | 99.5 |
| RR | 67.9 | 83.5 | 87.3 | |
| ER | 3.3 | 2.8 | 1.2 | |
| WR | 5.0 | 3.9 | 0 | |
| 0906005 | PR | 93.9 | 76.1 | 99.8 |
| RR | 68.2 | 88.1 | 93.9 | |
| ER | 2.3 | 2.4 | 0.6 | |
| WR | 4.5 | 5.3 | 0 | |
结合表 2对图 16中检测结果进行定量分析。小波法和逐步法难以兼顾查准率与查全率,而本文算法两者均在90%左右。在第1、3、4幅图中,小波法查全率均高于83%,但错误率较高,查准率偏低。这是因为该算法易将房屋、道路、裸地、河流等误判为云。在第1幅图中,逐步法查准率达到99.8%,但查全率却只有34.8%,这是因为存在大面积云层漏检。在第2幅图中,小波法和逐步法查准率均高于99%,但查全率却只有2.61%和31.1%,这也是因为对薄云的识别存在较大的局限性。从错误率方面比较,本文算法错误率最高仅为3.3%,其余两种算法错误率最低为4.4%,小波法和逐步法在第2幅图中甚至出现了15.6%和11.1%的高错误率。
结合表 3对图 17中检测结果进行定量分析。最大似然法查准率均在90%以上,但第2、3幅图查全率却均低于70%。主要是因为样本集中在厚云区域,并且负样本中裸地、房屋等与薄云表现出极大的相似性,导致许多薄云误判为非云对象。图割法查全率均高于83%,但查准率较低,特别第3幅图查准率只有76.1%,主要是因为该算法在云层与裸地、房屋相连的区域易出现误提取。本文算法错误率均最低,在1%左右。可以看出,与人工干预云检测算法相比,本文方法仍表现出较强的优越性。
2.3 运算性能实际生产中对云检测速度要求较高,为提高生产效率,可从原始数据降采样,高性能并行处理,算法优化3方面进行。本算法与参照算法相比,复杂度适中,计算量小,并且检测精度也较高。在系统配置为Intel(R)Core(TM)i5-3230M CPU @2.60 GHz,内存4 GB的计算机上各算法在耗时方面的对比结果如表 4所示。
| s | |||
| 影像编号 | 小波法 | 逐步法 | 本文算法 |
| 0906000 | 50.65 | 10.56 | 3.45 |
| 0906001 | 54.18 | 12.15 | 3.49 |
| 0906002 | 98.73 | 30.89 | 8.55 |
| 0906003 | 93.26 | 29.85 | 8.51 |
| 0906004 | 131.08 | 40.27 | 19.03 |
| 0906005 | 142.30 | 45.38 | 19.63 |
| 0906006 | 234.29 | 93.29 | 26.61 |
表 4中实、虚框中分别为同组数据处理速度最快与最慢。可以看出,本文算法效率高于逐步法和小波法。主要是因为逐步法通过多次双边滤波的方式提取纹理,这对计算的内存以及运算能力要求较高。而小波法通过多次小波变换获取低频信息,大大增加了计算量,直接导致检测效率低下。
3 结 语本文提出了一种基于多通道信息的国产高分辨率遥感卫星影像自动云检测方法。该方法通过改进的HIS模型,提高了薄云检测精度。在使用双边滤波提取影像纹理信息之前,采用直方图均衡化对亮度信息进行预处理,以突出地物纹理细节,有效弥补了传统纹理分析方法计算精度低、效率低下的不足。
本方法已用于实际项目生产中,可全自动地对资源三号、高分一号、高分二号等国产高分辨率卫星影像进行云检测。从实践生产分析该方法有以下优点:
(1) 无须人工干预,全自动化处理。
(2) 算法复杂度适中,计算量小,计算速度快。
(3) 检测精度高。可在准确检测厚云、薄云的前提下,有效排除高亮度水域、房屋、裸地等的干扰。
(4) 适用性较广,可用于能提供红、绿、蓝、近红外波段数据的国产高分辨率遥感卫星影像云检测。
另一方面,本方法也有其局限性,主要表现在处理厚薄不均的卷云时,会出现漏检测现象,主要是利用带限定条件Otsu阈值分割细节图时,易将纹理较细的卷云误判为非云。当条件允许时,可通过约束纹理阈值范围的方式加以改善,后期将针对此问题进行深入研究。
| [1] |
潘红播, 张过, 唐新明. 资源三号测绘卫星传感器校正产品几何模型[J].测绘学报,2013, 42 (4) : 516 –522 .
PAN Hongbo, ZHANG Guo, TANG Xinming, et al. The Geometrical Model of Sensor Corrected Products for ZY-3 Satellite[J]. Acta Geodaetica et Cartographica Sinica,2013, 42 (4) : 516 –522 . |
| [2] | CHEN P Y, SRINIVASAN R, FEDOSEJEVS G, et al. An Automated Cloud Detection Method for Daily NOAA-14 AVHRR Data for Texas, USA[J]. International Journal of Remote Sensing,2002, 23 (15) : 2939 –2950 . |
| [3] | OTSU N. A Threshold Selection Method from Gray-level Histograms[J]. Automatica,1975, 11 (285-296) : 23 –27 . |
| [4] | ZHU Zhe, WOODCOCK C E. Object-based Cloud and Cloud Shadow Detection in LandSat Imagery[J]. Remote Sensing of Environment,2012, 118 : 83 –94 . |
| [5] | PANEM C, BAILLARIN S, LATRY C, et al. Automatic Cloud Detection on High Resolution Images[C]//Proceedings of IEEE International Geoscience and Remote Sensing Symposium. Seoul: IEEE, 2005: 1-4. |
| [6] |
高贤君, 万幼川, 郑顺义, 等. 航空摄影过程中云的实时自动检测[J].光谱学与光谱分析,2014, 34 (7) : 1909 –1913 .
GAO Xianjun, WAN Youchuan, ZHENG Shunyi, et al. Real-time Automatic Cloud Detection during the Process of Taking Aerial Photographs[J]. Spectroscopy and Spectral Analysis,2014, 34 (7) : 1909 –1913 . |
| [7] |
秦永, 付仲良, 周凡, 等. 一种利用TM影像自动检测云层的方法[J].武汉大学学报(信息科学版),2014, 39 (2) : 234 –238 .
QIN Yong, FU Zhongliang, ZHOU Fan, et al. A Method of Automatic Cloud Detection Using TM Image[J]. Geomatics and Information Science of Wuhan University,2014, 39 (2) : 234 –238 . |
| [8] |
刘健. FY-2云检测中动态阈值提取技术改进方法研究[J].红外与毫米波学报,2010, 29 (4) : 288 –292 .
LIU Jian. Improvement of Dynamic Threshold Value Extraction Technic in FY-2 Cloud Detection[J]. Journal of Infrared and Millimeter Waves,2010, 29 (4) : 288 –292 . |
| [9] |
单娜, 郑天垚, 王贞松. 快速高准确度云检测算法及其应用[J].遥感学报,2009, 13 (6) : 1138 –1155 .
SHAN Na, ZHENG Tianyao, WANG Zhensong. High-speed and High-accuracy Algorithm for Cloud Detection and Its Application[J]. Journal of Remote Sensing,2009, 13 (6) : 1138 –1155 . |
| [10] | CHEN Gang, E Dongchen. Support Vector Machines for Cloud Detection over Ice-snow Areas[J]. Geo-spatial Information Science,2007, 10 (2) : 117 –120 . |
| [11] |
梁栋, 孔颉, 胡根生, 等. 基于支持向量机的遥感影像厚云及云阴影去除[J].测绘学报,2012, 41 (2) : 225 –231 .
LIANG Dong, KONG Jie, HU Gensheng, et al. The Removal of Thick Cloud and Cloud Shadow of Remote Sensing Image Based on Support Vector Machine[J]. Acta Geodaetica et Cartographica Sinica,2012, 41 (2) : 225 –231 . |
| [12] | VENKATESWARLU N B, SINGH R P. A Fast Maximum Likelihood Classifier[J]. International Journal of Remote Sensing,1995, 16 (2) : 313 –320 . |
| [13] |
张波, 季民河, 沈琪. 基于小波变换的高分辨率快鸟遥感图像薄云去除[J].遥感信息,2011 (3) : 38 –43 .
ZHANG Bo, JI Minhe, SHEN Qi. Wavelet-based Cloud Removal from High resolution Remote Sensing Data: An Experiment with QuickBird Imagery[J]. Remote Sensing Information,2011 (3) : 38 –43 . |
| [14] |
陶淑苹, 金光, 张贵祥, 等. 实现遥感相机自主辨云的小波SCM算法[J].测绘学报,2011, 40 (5) : 598 –603 .
TAO Shuping, JIN Guang, ZHANG Guixiang, et al. A Wavelet SCM Algorithm Used to Detect Cloud in Remote Sensing Cameras[J]. Acta Geodaetica et Cartographica Sinica,2011, 40 (5) : 598 –603 . |
| [15] |
陈奋, 闫冬梅, 赵忠明. 基于无抽样小波的遥感影像薄云检测与去除[J].武汉大学学报(信息科学版),2007, 32 (1) : 71 –74 .
CHEN Fen, YAN Dongmei, ZHAO Zhongming. Haze Detection and Removal in Remote Sensing Images Based on Undecimated Wavelet Transform[J]. Geomatics and Information Science of Wuhan University,2007, 32 (1) : 71 –74 . |
| [16] |
陈振炜, 张过, 宁津生, 等. 资源三号测绘卫星自动云检测[J].测绘学报,2015, 44 (3) : 292 –300 .DOI:10.11947/j.AGCS.2015.20130384.
CHEN Zhenwei, ZHANG Guo, NING Jinsheng, et al. An Automatic Cloud Detection Method for ZY-3 Satellite[J]. Acta Geodaetica et Cartographica Sinica,2015, 44 (3) : 292 –300 .DOI:10.11947/j.AGCS.2015.20130384. |
| [17] |
吴更石, 梁德群, 田原. 基于分形维数的纹理图像分割[J].计算机学报,1999, 22 (10) : 1109 –1113 .
WU Gengshi, LIANG Dequn, TIAN Yuan. Texture Image Segmentation Using Fractal Dimension[J]. Chinese Journal of Computers,1999, 22 (10) : 1109 –1113 . |
| [18] |
冯建辉, 杨玉静. 基于灰度共生矩阵提取纹理特征图像的研究[J].北京测绘,2007 (3) : 19 –22 .
FENG Jianhui, YANG Yujing. Study of Texture Images Extraction Based on Gray Level Co-occurrence Matrix[J]. Beijing Surveying and Mapping,2007 (3) : 19 –22 . |
| [19] |
夏德深, 金盛, 王健. 基于分数维与灰度梯度共生矩阵的气象云图识别(I):分数维对纹理复杂度和粗糙度的描述[J].南京理工大学学报,1999, 23 (3) : 278 –281 .
XIA Deshen, JIN Sheng, WANG Jian. Fractal Dimension and GGCM Based Meteorology Cloud Pictures Recognition——Description of Texture Complexity and Roughness by Fractal Dimension(I)[J]. Journal of Nanjing University of Science and Technology,1999, 23 (3) : 278 –281 . |
| [20] |
夏德深, 金盛, 王健. 基于分数维与灰度梯度共生矩阵的气象云图识别(II):灰度梯度共生矩阵对纹理统计特征的描述[J].南京理工大学学报,1999, 23 (4) : 289 –292 .
XIA Deshen, JIN Sheng, WANG Jian. Fractal Dimension and GGCM Meteorology Cloud Pictures Recognition——Deshcription of Texture Statistical Characteristics by Gray Level-gradient Co-occurrence Matrix(Ⅱ)[J]. Journal of Nanjing University of Science and Technology,1999, 23 (4) : 289 –292 . |
| [21] | ZHANG Qing, XIAO Chunxia. Cloud Detection of RGB Color Aerial Photographs by Progressive Refinement Scheme[J]. Journal of Latex Class Files,2012, 11 (4) : 1 –12 . |
| [22] |
黎曦, 郑宏, 刘操. 利用HSI色彩空间的PCNN人脸识别方法[J].武汉大学学报(信息科学版),2014, 39 (12) : 1499 –1503 .
LI Xi, ZHENG Hong, LIU Cao. A Method of Face Recognition Based on HIS-PCNN[J]. Geomatics and Information Science of Wuhan University,2014, 39 (12) : 1499 –1503 . |
| [23] |
徐逸祥, 朱子豪, 刘英毓. 卫星影像的云雾检测及干扰去除[J].国土资源遥感,2006 (3) : 23 –28 .
XU Yixiang, ZHU Zihao, LIU Yingyu. Developing Technique for the Detection and Removal of Cloud and Haze in Satellite Images[J]. Remote Sensing for Land &Resources,2006 (3) : 23 –28 . |
| [24] | BOYKOV Y Y, JOLLY M P. Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images[C]//Proceedings of the 8th IEEE International Conference on Computer Vision. Vancouver, BC:IEEE, 2001, 1: 105-112. |