



2. 西部矿产资源与地质工程教育部重点实验室,陕西 西安 710054;
3. 德国波茨坦地学中心,德国 波茨坦 14469;
4. 武汉大学测绘学院,湖北 武汉 430079;
5. 国家测绘地理信息局第一大地测量队,陕西 西安 710054
2. Key Laboratory of Western China's Mineral Resources and Geological Engineering, Ministry of Education, Xi'an 710054, China;
3. GFZ, Potsdam 14469, Germany;
4. School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China;
5. The First Geodetic Surveying Brigade of National Administration of Surveying, Mapping and Geoinformation, Xi'an 710054, China
1 引 言
精密单点定位技术(precise point positioning,PPP)自1997年由美国喷气推进实验室(JPL)提出后,成为GPS导航定位领域的一个研究热点[1]。近年来,经过国内外诸多学者的不懈努力,PPP定位中多项关键技术得以解决和发展[2, 3, 4, 5, 6, 7, 8]。目前,事后PPP定位的精度已经可以达到厘米级甚至毫米级,实时PPP的定位精度在分米级到厘米级,并已逐渐应用于测量、导航、授时、空间大气研究和工程变形监测等领域[9, 10, 11, 12, 13, 14, 15]。
由于单频GPS接收机成本低廉,在当前卫星导航与定位领域拥有大量的用户,因此,使用廉价的单频接收机来实现高精度单机定位是许多导航定位用户所追求和关注的热点问题[16],而单频PPP恰好能满足低成本高精度单机定位用户的这些需要,目前已有不少学者开展了GPS单频PPP方面的研究工作并取得了丰富的成果[16, 17, 18, 19, 20, 21, 22, 23, 24]。
对于单频PPP而言,其核心问题是电离层延迟的高效修正技术。在现有的单频PPP数据处理方法中,电离层延迟改正主要采取了4种修正方法:第1种方法是采用电离层模型改正,GPS导航电文的Klobuchar模型只能消除50%~60%的电离层延迟,IGS分析中心等机构提供的全球电离层格网数据,其精度在2~3 TECU,尤其是在电离层活跃区域以及IGS站稀疏地段,其精度难以保证[25, 26];第2种方法是根据电离层引起的群延迟和相延迟大小相等、方向相反这一特点,采用码和相位的半合组合进行修正,因伪距码观测值精度较低,仍然难以保证精度[16, 20];第3种方法是将电离层延迟当作未知参数进行估计,但估计的电离层延迟受不同的电离层投影函数和延迟参数的影响,其结果仍具有不稳定性[27, 28];第4种方法是通过基准站和流动站之间的差分信息对流动站进行改正,有效消除或减弱了电离层影响,但该方法受基准站观测值及距离的限制,不便普遍使用[23]。
当前,基于原始观测值的PPP算法已得到了初步发展,它具有可用观测值多、保留了所有观测信息、不仅能直接得到测站坐标还可以获取高精度电离层和硬件延迟信息的优点,是PPP定位算法研究的主要方向之一[29, 30, 31, 32]。
基于上述背景,本文研究了一种基于原始观测值的单频PPP算法。该算法的主要特点是在单频PPP观测方程中增加了电离层延迟先验信息、空间和时间约束信息,并将电离层延迟当作未知参数与其他定位参数一并解算。
2 算法模型及数据处理策略 2.1 观测方程本文研究的基于原始值的单频PPP观测方程可以写成式(1)—式(5)的形式(式(1)和式(2)为伪距和载波相位的原始观测值方程;式(3)—式(5)为电离层延迟的虚拟观测值方程)
式(1)—式(5)中,P、Φ分别为伪距和载波观测值;i为卫星编号;ρ为接收机和卫星间的几何距离;δtr、δts分别为接收机和卫星的钟差;dr、ds分别为接收机和卫星端的码硬件延迟;δr、δs分别为接收机和卫星端的相位硬件延迟;δφr、δφs分别为接收机和卫星端的初始相位;dtrop、dion分别为对流层和电离层延迟;λ、N为载波波长和整周模糊度;VTEC为天顶方向总电子含量;Δ表示历元差分;ε为各观测值噪声,其对应的方差为σ2;F(vtec)为电离层的天顶延迟与信号传播延迟之间的投影函数[33],其含义如式(6)所示 式中,f为载波频率;R为地球半径;H为电离层单层的高度;Z为卫星天顶角。




由IGS提供的全球格网模型,它的平均精度为2~3 TECU,除了在海洋地区或测站稀疏区域精度略低之外,其精度已经与伪距观测值精度相当。因此,若给定合适的权,这些电离层模型值可以作为电离层的先验信息来增强PPP解的强度。同时,电离层的总电子含量具有一定的空间分布特征,对其空间特性进行合理建模约束也能改善解的强度,其空间信息约束方程式(4)由式(7)获取,其中,λ、φ为穿刺点的经纬度;λ0、φ0为测站的经纬度;Eij为空间约束系数;m、n为模型的阶数。对于单站观测,电离层穿刺点的分布比较集中,m、n通常取2阶。因此,当观测卫星大于等于4颗时,可以采用式(7)和格网模型计算的VTEC求解电离层空间约束的系数
此外,电离层总电子含量也具有时间上的变化规律,因此可以增加电离层的时间约束方程式(5)来保持电离层延迟变化的时间连续性。 2.2 随机模型
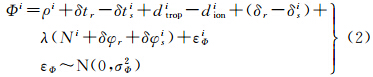
对于以上观测方程,其随机模型的确定如表 1所示,其中,θ为卫星高度角;Bipp为穿刺点的纬度;local_t为测站的地方时。对于伪距和载波观测值的权,根据卫星高度角和观测值噪声来确定,本文中伪距和载波的噪声标准差分别为0.3 m和0.003 m;电离层先验信息观测值的权根据格网电离层模型精度、穿刺点经纬度和地方时确定,本文中模型先验精度的标准差为0.3 m;其空间约束观测值的权根据空间建模残差确定,本文中建模残差的标准差为0.4 m;时间约束观测值的权则根据电离层变化来确定,本文中的历元变化的标准差确定为0.05 m。
对于以上给出的观测模型和随机模型,采用序贯最小二乘法进行参数求解。需要说明的是,在数据处理过程中,采用IGS的精密星历和钟差等定位产品;地球自转、相对论、潮汐、天线偏差、相位缠绕等可以模型化的误差采用现有的模型进行改正[3, 34]。接收机的码硬件延迟被钟差吸收,即δt=δtr+dr,而卫星端的码硬件延迟偏差采用IGS发布的DCB产品改正[34];其相位模糊度中包含了码和相位观测的硬件延迟及初始相位,不再具有整周特性,即amb=-dr+(δr-δis)+λ(Ni+δφr+δφis)。假定每个历元观测到N颗卫星,则总共有5N个观测方程和(5+2N)个未知参数,它们分别是接收机的三维位置、钟差、对流层延迟、各颗卫星上的电离层延迟和相位模糊度。在这些未知参数中,静态处理时,法方程中继承的参数既有坐标参数,又有模糊度和对流层参数(连续弧段内);动态处理时,法方程中继承的参数只有模糊度和对流层参数(连续弧段内),其坐标参数的法方程仅仅是当前历元约化后的法方程。在每个历元处理中,先等价约化得到含有继承参数的等价法方程,再与累计的法方程叠加,求解这些继承参数后,再回代方程求解其他非继承参数。在参数解算过程中,接收机钟差当作高斯白噪声处理;对流层延迟先采用SAAS模型改正,其残差部分采用分段线性处理,每两个小时估计一组系数;其电离层延迟作为随机游走过程处理;模糊度在连续弧段内为常数,在周跳发生时重新初始化处理。
3 测试与结果分析 3.1 数据及方案介绍选取2012年3月12日(年积日72天)全球范围内的178个IGS站的数据进行测试分析,其测站的分布如图 1所示。数据采样间隔为30 s,观测值类型为双频P1、P2、L1、L2。在单频测试分析中,仅使用其P1和L1观测值,且动态测试采样静态数据模拟动态。以下将分别从单频PPP的静态和模拟动态的收敛速度、定位精度和提取的电离层总电子含量精度3个方面来分析本算法的可行性和可靠性。
 |
| 图 1 IGS站点分布图Fig. 1 The distributing map of IGS stations |
图 2和图 3分别为静态和模拟动态PPP收敛速度的对比,其中(a)、(b)、(c)分别代表传统半合模型单频PPP[16](标记为S_Traditional)、基于原始观测值单频PPP(标记为S_New)和双频无电离层组合PPP(D_PPP)算法结果。从图 2和图 3中可以看出,基于原始观测值的单频PPP算法通过增加电离层约束方程来估计电离层延迟,提高了电离层延迟误差改正的精度,因此加快了PPP解的收敛速度,在第350历元左右,解已趋于稳定。尤其是在东西方向和高程方向,常规方法因大气误差难以准确处理,其收敛速度和稳定性较差,使用本文方法已得到显著改善,其静态单频解的收敛速度已接近于双频PPP解的收敛速度;在动态定位中,虽然解算参数增多导致解的强度减弱,且单频PPP解的稳定性远差于双频PPP,但新方法的收敛速度仍然优于传统方法。
 |
| 图 2 静态定位收敛速度对比Fig. 2 Comparison of the convergence speed for the static positioning |
 |
| 图 3 动态定位收敛速度对比Fig. 3 Comparison of the convergence speed for the kinematic positioning |
图 4为单频PPP静态定位单天解的真误差分布情况,(a)、(b)、(c)分别代表E、N、U方向,其真值以IGS公布的双差周解结果为参考,其精度优于5 mm。从计算结果中可以得到,其单天解在E、N、U方向上真误差的RMS值分别为0.025 m、0.013 m、0.038 m,比当前双频PPP的毫米级精度略差。图 5为静态模拟动态定位结果RMS的精度统计,(a)、(b)、(c)分别代表E、N、U方向。从计算结果中可以得到,对于模拟动态的单频PPP,E、N、U方向RMS统计值中90%以上的都小于0.3 m,其均值分别为0.217 m、0.193 m、0.231 m,完全可以到达分米级精度。
 |
| 图 4 静态定位精度统计分析Fig. 4 Statistics and analysis on the accuracy of static positioning |
 |
| 图 5 动态定位精度统计分析Fig. 5 Statistics and analysis on the accuracy of kinematic positioning |
图 6(a)为单频PPP求解的VTEC(标记为S_PPP)与双频PPP求解的VTEC(标记为D_PPP)对比图,从中可以看出,该方法提取的VTEC与双频PPP求解的VTEC结果具有较好的一致性,合理地反映了电离层总电子含量的日变化特征。图 6(b)为所有测站单频PPP求解的VTEC序列与双频PPP求解的VTEC序列比较得到的偏差的RMS值的分布统计,其均值为4.40 TECU。
 |
| 图 6 单、双频PPP求解的电离层VTEC的比较及偏差的精度统计Fig. 6 Comparison and accuracy statistics of ionospheric VTEC between single-frequency PPP and dual-frequency PPP solution |
本文研究了一种基于原始观测值的单频PPP算法,该算法综合考虑电离层先验模型信息和参数估计方法,通过增加电离层的先验信息约束、空间和时间约束方程,将电离层延迟作为未知参数与其他定位参数一并解算。该方法既考虑了电离层先验模型信息,又顾及了电离层的空间和时间特征,为解决单频PPP定位中的电离层误差提供了一种新的途径。算例数据和统计分析结果表明,该算法的收敛速度和稳定性较传统方法均有所改善,基于该方法的单频PPP静态定位解的精度优于3 cm,模拟动态解可以达到3 dm的精度。此外,利用该方法所获取的电离层VTEC也可以作为一种附属定位产品使用。
| [1] | ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks[J]. Journal of Geophysical Research, 1997, 102(B3):5005-5017. |
| [2] | ZUMBERGE J F. Automated GPS Data Analysis Service[J]. GPS Solutions, 1999, 2(3):76-78. |
| [3] | KOUBA J, HROUX H. Precise Point Positioning Using IGS Orbit and Clock Products[J]. GPS Solutions, 2001,5(2):12-28. |
| [4] | YANG Gao. Performance Analysis of Precise Point Positioning Using Real-time Orbit and Clock Products[J]. Journal of Global Positioning Systems, 2004, 3(1-2):95-100. |
| [5] | GAO Y, SHEN X. Improving Ambiguity Convergence in Carrier Phase-based Precise Point Positioning [C] //Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation. Salt Lake City:[s.n.],2001: 1532-1539. |
| [6] | LIU Jingnan, YE Shirong. GPS Precise Point Positioning Using Undifferenced Phase Observation [J]. Geomatics and Information Science of Wuhan University, 2002, 27(3): 234-240.(刘经南,叶世榕. GPS非差相位精密单点定位技术探讨[J]. 武汉大学学报:信息科学版, 2002, 27(3):234-240.) |
| [7] | HAN Baomin, OU Jikun. Precise Point Positioning Based on Undifferenced GPS Data [J]. Geomatics and Information Science of Wuhan University, 2003, 4(28): 409-412.(韩保民,欧吉坤. 基于GPS非差观测值进行精密单点定位研究[J]. 武汉大学学报:信息科学版, 2003, 4(28): 409-412.) |
| [8] | HU Congwei, CHEN Wu, GAO Shan, et a1. Data Processing for GPS Precise Point Positioning[J]. Transactions of Nanjing University of Aeronautics and Astronautics,2005,22(2):43-50. |
| [9] | WU Chen, HU Congwei,LI Zhihua, et al. Kinematic GPS Precise Point Positioning for Sea Level Monitoring with GPS Buoy [J]. Journal of Global Positioning Systems, 2004, 3(1-2):302-307. |
| [10] | ZHANG Xiaohong, LIU Jingnan, FORSBERG R. Application of Precise Point Positioning in Airborne Survey[J]. Geomatics and Information Science of Wuhan University, 2006, 31(1): 19-22.(张小红,刘经南,Forsberg R. 基于精密单点定位技术的航空测量应用实践[J]. 武汉大学学报:信息科学版,2006,31(1):19-22.) |
| [11] | YUAN Xiuxiao, FU Jianhong, LOU Yidong. GPS-Supported Aerotriangulation Based on GPS Precise Point Positioning[J]. Acta Geodaetica et Cartographica Sinica, 2007, 36(3):251-255.(袁修孝,付建红,楼益栋. 基于精密单点定位技术的GPS 辅助空中三角测量[J]. 测绘学报, 2007, 36(3):251-255.) |
| [12] | GENG Tao, ZHAO Qile, LIU Jingnan, et al. Real Time Precise Point Positioning Based on PANDA Software[J]. Geomatics and Information Science of Wuhan University, 2007, 32(4):312-315.(耿涛,赵齐乐,刘经南,等.基于PANDA 软件的实时精密单点定位研究[J]. 武汉大学学报:信息科学版, 2007, 32(4):312-315.) |
| [13] | ZHANG Baocheng, OU Jikun, LI Zishen, et al. Determination of Ionospheric Observables with Precise Point Positioning[J].Chinese Journal of Geophysics, 2011, 54(4):950-957.(张宝成,欧吉坤,李子申,等. 利用精密单点定位求解电离层延迟[J]. 地球物理学报, 2011, 54(4):950-957.) |
| [14] | LI Li, KUANG Cuilin, ZHU Jianjun, et al. Rainstorm Nowcasting Based on GPS Real-time Precise Point Positioning Technology[J].Chinese Journal of Geophysics, 2012, 55(4):1129-1136.(李黎,匡翠林,朱建军,等. 基于实时精密单点定位技术的暴雨短临预报[J]. 地球物理学报, 2012, 55(4):1129-1136.) |
| [15] | KUANG Cuilin, MIN Qizhong, YI Zhonghai, et al. Monitoring of Wind-induced Responses of High-rise Building Based on PPP Technology[J]. Geotechnical Investigation and Surveying, 2013, (2):58-62.(匡翠林,闵启忠,易重海,等. 基于PPP技术监测高层建筑风致动态响应[J]. 工程勘察, 2013, (2):58-62.) |
| [16] | ZHANG Xiaohong, LI Xingxing, GUO Fei, et al. Realization and Precision Analysis of Single-frequency Precise Point Positioning Software [J]. Geomatics and Information Science of Wuhan University, 2008, 33(8):783-787.(张小红,李星星,郭斐,等. GPS单频精密单点定位软件实现与精度分析[J]. 武汉大学学报:信息科学版, 2008, 33(8):783-787.) |
| [17] | LE A Q, TIBERIUS C. Single-frequency Precise Point Positioning with Optimal Filtering[J]. GPS Solutions,2007,11(11):61-69. |
| [18] | HAO Ming, WANG Qingliang. Study of Precise Point Positioning Using GPS Single-frequency Receiver[J]. Science of Surveying and Mapping, 2010, 35(2):123-124.(郝明,王庆良. 基于GPS单频接收机的精密单点定位研究[J]. 测绘科学, 2010, 35(2):123-124.) |
| [19] | LU Chenxi, TAN Yunhua, ZHU Bocheng, et al. Adaptive Kalman Filter Based Navigation Algorithm for Single-frequency Precise Point Positioning[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2011, 47(4):587-592.(陆晨曦,谭云华,朱柏承,等. 单频精密单点定位中基于卡尔曼滤波的自适应导航算法[J]. 北京大学学报, 2011, 47(4):587-592.) |
| [20] | TU Rui, HUANG Guanwen, LING Qing. Precise Point Positioning of GPS Single-Frequency [J]. Science of Surveying and Mapping,2011, 36(3):68-69.(涂锐,黄观文,凌晴. GPS单频精密单点定位的研究实现[J]. 测绘科学, 2011, 36(3):68-69.) |
| [21] | JIANG Weiping, ZOU Xuan, TANG Weiming. A New Kind of Real-time PPP Method for GPS Single-frequency Receiver Using CORS Network[J].Chinese Journal of Geophysics,2012,55(5): 1549-1556.(姜卫平,邹璇,唐卫明. 基于CORS网络的单频GPS实时精密单点定位新方法[J]. 地球物理学报, 2012,55(5): 1549-1556.) |
| [22] | RUAN Rengui, WU Xianbing, FENG Laiping, et al. Single-frequency Precise Point Positioning Algorithm Based on Satellite Differential GRAPHIC Observables[J]. Journal of Geomatics Science and Technology, 2012, 29(1):24-27.(阮仁桂,吴显兵,冯来平,等. 星间差分GRAPHIC观测量单频精密单点定位算法[J].测绘科学技术学报, 2012, 29(1):24-27.) |
| [23] | TU Rui, HUANG Guanwen, ZHANG Qin, et al. PPP Algorithm of Single Frequency Based on Corrections of Single-base Station and Ionospheric Parameters Estimation [J]. Geomatics and Information Science of Wuhan University, 2012,37(2):170-173.(涂锐,黄观文,张勤,等. 基于利用单基准站改正信息和电离层参数估计的单频PPP算法[J].武汉大学学报:信息科学版,2012,37(2):170-173.) |
| [24] | TU Rui, HUANG Guanwen, ZHANG Qin, et al. A New Algorithm on Ionospheric Delay Correction for Single Frequency GPS Receivers[J]. Geomatics and Information Science of Wuhan University, 2012,37(6):667-670.(涂锐,黄观文,张勤,等. GPS单频机电离层延迟改正新算法[J]. 武汉大学学报:信息科学版,2012,37(6):667-670.) |
| [25] | FELTENS J, DOW J M, MARTN-MUR T J, et al. Verification of ESOC Ionosphere Modeling Status of IGS Intercomparison Activity[C]//IGS Presentation. IGS Analysis Center Workshop. Silver Spring, MD:[s.n.],1996. |
| [26] | TU Rui, ZHANG Qin, HUANG Guanwen, et al. Establishment of Regional Ionospheric Delay Model in Xi'an Based on Phase Smoothing Pseduo-range and LS Surface Function[J]. Geomatics and Information Science of Wuhan University, 2011,36(2):218-221.(涂锐,张勤,黄观文,等. 基于相位平滑伪距和最小二乘曲面函数建立西安市区域电离层模型[J]. 武汉大学学报:信息科学版,2011,36(2):218-221.) |
| [27] | TU Rui, ZHANG Qin, HUANG Guanwen. On Ionospheric Delay Processing Methods for Single Frequency Precise Point Positioning [J]. Journal of Geodesy and Geodynamics, 2010, 30(2):99-103.(涂锐,张勤,黄观文. 单频精密单点定位电离层延迟处理方法研究[J]. 大地测量与地球动力学, 2010, 30(2):99-103.) |
| [28] | RUAN Rengui, WU Xianbing, FENG Laiping, et al. Single-frequency Precise Point Positioning with Simultaneous Ionospheric Delay Estimation[J]. Acta Geodaetica et Cartographica Sinica,2012, 41(4):490-495.(阮仁桂,吴显兵,冯来平,等. 同时估计电离层延迟的单频精密单点定位方法[J]. 测绘学报, 2012, 41(4):490-495.) |
| [29] | TU R, GE M, ZHANG H, et al. The Realization and Convergence Analysis of Combined PPP Based on Raw Observation[J]. Advances in Space Research, 2013, 52(1):211-221. |
| [30] | LI X, GE M, DOUA J, et al. Real-time Precise Point Positioning Regional Augmentation for Large GPS Reference Networks[J]. GPS Solutions, 2014, 18(1):61-71. |
| [31] | ZHANG Baocheng, OU Jikun, YUAN Yunbin, et al. Precise Point Positioning Algorithm Based on Original Dual-frequency GPS Code and Carrier-phase Observations and Its Application[J]. Acta Geodaetica et Cartographica Sinica,2010, 39(5): 478-483.(张宝成,欧吉坤,袁运斌,等. 基于GPS双频原始观测值的精密单点定位算法及应用[J]. 测绘学报, 2010, 39(5):478-483.) |
| [32] | YUAN Yunbin, HUO Xingliang, OU Jikun. Models and Methods for Precise Determination of Ionospheric Delay Using GPS[J]. Progress in Natural Science, 2007, 17(2): 187-196. |
| [33] | MANNUCCI A J, WILSON B D, EDWARDS C D. A New Method for Monitoring the Earth's Ionospheric Total Electron Content Using the GPS Global Network[C]//Proceeding of the ION GPS-93.Salt Lake City:[s.n.],1993:1323-1332. |
| [34] | DACH R, HUGENTOBLER U, FRIDEZ P, et al. Bernese GPS Software Version 5.0[R].[S.l.]: Astronomical Institute,2007. |