


2. 中国矿业大学 环境与测绘学院,江苏 徐州 221116;
3. 武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079
2. School of Environmental Science and Spatial Informatics,China University of Mining and Technology,Xuzhou 221116,China;
3. State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430079,China
1 引 言
合成孔径雷达干涉测量(synthetic aperture radar interferometry,InSAR)是利用SAR复数据的相位信息获取地形三维信息的技术[1, 2, 3]。为了获取高精度的数字高程模型(digital elevation model,DEM),必须要对系统的干涉参数进行定标,这些参数包括:绝对时间延迟、基线长度、基线倾角、干涉相位、载机姿态等。对于单场景干涉定标,文献[4]从InSAR几何关系出发,介绍了干涉敏感度定标模型;文献[5]对干涉敏感度方程进行补充和修正,推导了斜视几何关系下的干涉敏感度方程;文献[6]提出了基于权重和差分敏感度模型的干涉定标方法;文献[7]提出包含基线长度、基线倾角和干涉相位参数的定标新模型。综上所述,目前常用的单场景干涉定标方法是基于线性化误差近似的敏感度方程模型。
在机载InSAR系统大区域作业时,为了获得高精度DEM,每一架次均须飞临定标场,以减小雷达系统在开关机时系统参数产生的随机误差,这就要求每一架次飞临定标场时,均需人工布设定标点,耗时又耗力。传统的联合定标算法是针对多个相邻场景,利用同名点进行高程信息的传递,然后利用区域网平差理论实现所有场景的定标[8, 9, 10, 11, 12],其目的是实现多场景数据间的拼接。本文提出的多架次同场景数据的联合定标处理,其目的是实现一次布标同时标定多架次干涉系统参数,在不明显降低定标精度的前提下,减少野外布设角反射器的工作量和资金投入,最后实现大区域作业任务区高精度DEM数据的获取,促进我国InSAR技术在测绘领域和测图工程的实用化。本文研究多架次同一场景机载双天线InSAR数据的联合定标问题,提出一种利用一次布设的控制点标定多架次干涉参数的联合定标新算法,主要包括适用于机载双天线InSAR系统的干涉定标参数的选取,以及联合定标模型的研究。最后通过对中国测绘科学研究院的CASMSAR系统X波段的InSAR双天线数据进行联合定标处理,验证了本文提出算法的正确性和有效性。
2 三维重建模型InSAR测量通过距离方程、多普勒方程和干涉相位方程描述InSAR基本测量值与地面目标点位置之间的关系,并通过联立方程组获取地面目标点的三维位置的过程称为地形的三维重建[6, 13]。本文采用视向量正交分解[5, 14, 15, 16]的方法,给出目标三维位置的表达形式。
如图 1所示干涉平台中,A1、A2为平台天线1、2的相位中心;A1、A2为天线A1、A2的位置向量;P为目标点P的位置坐标,r1、r2为天线A1、A2到目标点P的斜距向量,即视向量,ri=|ri|,i=1,2;b为基线向量,b=A2-A1,b=|b|;bn、bv分别表示交轨、顺轨基线分量,bn=|bn|,bv=|bv|;θ为天线A1在目标点P处对应的视角;β为雷达斜视角;O-xyz为ECR(earth centered rotating)坐标系,其中x为平台飞行方向,z为高程方向,y与x、z构成右手坐标系;A1-vnw为移动坐标系(madsen moving coordinate,MMC),其中v为平台飞行方向,n为垂直于航向的基线分量方向,w与v、n构成右手坐标系。

|
| 图 1 机载InSAR几何模型 Fig. 1 Airborne InSAR geometry model |
视向量正交分解法实质就是对视向量进行正交分解,通过坐标变换实现视向量从移动坐标系到全局坐标系的转换[6]。在MMC坐标系下,r1的单位视向量 vnw可表示为
vnw可表示为

 ;
; ;
; 。定义回波到达方位角为
式中,(
。定义回波到达方位角为
式中,(
 ,
, ,
, )为MMC坐标系下的单位正交基;fdc1为多普勒频率;v为载机速度;λ为波长;φ为目标的干涉相位;Q为雷达的工作模式,Q=1对应单发双收模式,Q=2对应乒乓模式。则在O-xyz坐标系目标点P可以表示为
式中,Γ为从MMC坐标系到全局坐标系的旋转矩阵[6],包括平台姿态角(θy,θp,θr)和基线倾角α参数。正侧视模型右侧视几何关系条件下,β=0,此时重建模型表示为
3 联合干涉参数定标算法
3.1 算法处理流程
)为MMC坐标系下的单位正交基;fdc1为多普勒频率;v为载机速度;λ为波长;φ为目标的干涉相位;Q为雷达的工作模式,Q=1对应单发双收模式,Q=2对应乒乓模式。则在O-xyz坐标系目标点P可以表示为
式中,Γ为从MMC坐标系到全局坐标系的旋转矩阵[6],包括平台姿态角(θy,θp,θr)和基线倾角α参数。正侧视模型右侧视几何关系条件下,β=0,此时重建模型表示为
3 联合干涉参数定标算法
3.1 算法处理流程
本文提出的多架次同场景的联合干涉参数定标算法基本思路是:首先选取多架次数据中的布控制点InSAR双天线数据利用改进敏感度方程模型进行干涉参数定标处理,获取定标后的高程数据文件;其次,选取多架次数据间高相干性振幅稳定的高程连接点,其间主要利用基于局部配准的配准方法和PS点目标选取方法中的振幅阈值离差法和相干系数阈值法;最后,根据高程控制点和连接点属性的不同,建立联合定标模型,迭代求解各架次的干涉参数。其中干涉参数选择、高程连接点选取和建立联合定标模型是算法的关键步骤, 本文对选择干涉参数和建立联合定标模型进行了详细论述,只简单介绍了高程连接点选取的思想。其具体流程如图 2所示。

|
| 图 2 多架次同一场景SAR数据联合定标流程图 Fig. 2 Joint calibration flow chart of multi-flight SAR data in same area |
由三维重建模型中的式(4)可知目标高程的表达式为
对于机载InSAR系统,获取数据在成像过程中通过运动补偿处理后,平台姿态角补偿为0,则在干涉定标过程中不再对平台姿态角进行改正。在InSAR测高中,可简化模型,即bn=b,此时目标高程是关于平台高度、雷达斜距、基线长度、基线倾角和干涉相位参数的函数。由于载机安装有高精度的POS系统,其定位精度在0.1m以内,对反演高程精度影响较小,因此本文亦不对平台高度进行定标。干涉参数定标标定各参数的系统误差,而对于机载双天线系统数据而言,SAR复数据共轭相乘获取的干涉相位的系统误差大部分得以消除。由干涉相位方程可知,干涉相位与雷达斜距紧密相关,敏感度方程模型充分利用了斜距和干涉相位的关系,在对斜距补偿的时候,亦可在一定程度上对干涉相位产生的高程误差进行补偿。因此本文构建一种考虑雷达斜距、基线长度和基线倾角3个参数的敏感度方程定标方法,则式(5)线性化误差近似的敏感度方程模型可表示为 式中,F为目标点的高程真值;F0为目标点的高程初值,该值可从干涉处理生成的高程数据文件中获得;Δb、Δα、Δr1为需要标定的改正数参数;a0、a1、a2为敏感度系数,具体表示形式为 由图 1可知HP=HA1-r1·cosθ,联立式(5)可得θ=arccos(cos(θ1+α))。



由上可知,控制点高程差和改正参数组成的改进敏感度方程模型为
式中,A为敏感度系数组成的敏感度矩阵;ΔX为待估计的干涉参数偏差;Δh为控制点高程差。 3.3 高程连接点的选取
由于不同架次获取数据时载机平台的飞行速度、姿态都不尽相同,因此多架次同一场景SAR数据间会产生平移、缩放、旋转,甚至会产生不规则的局部变形,影像间相对较大的相对变形使得repeat-pass机载SAR数据配准精度很难满足干涉处理的要求,因此本文采用基于局部配准的配准方法[17, 18]的思想,小区域范围内,对应图像间旋转和缩放作用忽略不计,利用基于窗口的自动配准互相关函数[19]算法,选取搜索窗口内最大相干系数点作为配准点。
对这些配准点进行粗差剔除后,本文引入永久散射体(permanent scatters,PS)点目标提取思想用于最终高程连接点的选取。文献[11]指出,高程连接点应为干涉相位误差尽量小、相干系数较大、散射特性简单的点,根据PS[20, 21]的特性,PS点即为振幅相位稳定、信噪比较高、单独相关的像元点,因此理论上利用PS选点方法能够提高选点稳定性。现有PS点目标提取方法很多,一般根据幅度、相干性、相位等信息进行选择。本文算法首先利用振幅阈值离差法[20, 22, 23]选取在测图期间保持振幅稳定的特征点,之后对这些特征点再利用相干系数阈值法[20, 22, 23]选取保持高相干性的点作为最终的高程连接点。由于处理的SAR影像是通过信号的发射接收、距离向压缩生成SLC数据的复杂过程得到的,其中一系列因素会影响图像的辐射能量值,因此在进行特征点选择之前,必须对多架次机载SAR影像进行相对辐射校正,转换为同一基准的振幅数据。
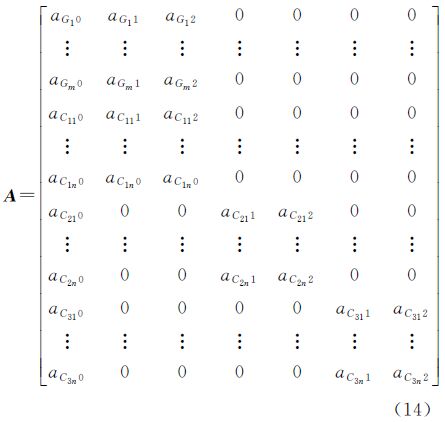
3.4 联合定标模型本文提出的联合定标方法将全部数据分为两类:①GPS差分测量获取的高程控制点,该类数据视为无误差点;②定标后获取的高程连接点高程数据,该类数据为有高程误差点。本文提出的联合定标模型根据两类数据点属性的不同,建立不同的高程误差模型,其表示形式为
式中,HGi为GPS测量的第i个控制点的高程值;HGi0为从主影像对干涉测量获取的高程数据中读取的第i个控制点的高程初值;(aGi0,aGi1,aGi2)表示第i个控制点对应的敏感度系数;HCj为从定标后高程数据文件中获取的第j个特征连接点的高程值;hj为第j个连接点的高程误差;HCkj0为第k架次数据对干涉测量得到的高程数据中第j个特征连接点的初始高程值;(aCkj0,aCkj1,aCkj2)表示为第k架次数据中第j个特征连接点的敏感度系数;Δb为基线长度改正数;(Δαk,Δrk)为第k架次基线倾角和斜距加常数。相应的矩阵形式为 式中,A为联合敏感度矩阵,当k=3时,其形式可表示为 式中,m、n分别为控制点和高程连接点的数目;X为待估计的干涉参数,X=[Δb Δα1 Δr1 Δα2 Δr2 Δα3 Δr3]T;B是由0、1组成的加密连接点高程差改正的系数矩阵,①类点对应的系数为0,②类点对应的高程改正数系数为1;t为加密连接点的高程改正数,t=[h1 h2 … hn]T。然后根据以上提出的联合定标模型迭代求解不同架次的干涉系统参数,直至控制点和高程连接点的精度满足要求为止。


4 试验与分析
本文选取中国测绘科学研究院的CASMSAR系统获取的X波段InSAR数据对提出的联合定标算法进行验证,该系统平台的雷达工作频率为9.6GHz,飞行绝对高度为6500m,数据的方位向和距离向分辨率为0.5m。根据GCP定标点的布设规则,GCP定标点应该在整个测绘带内沿距离向均匀分布,若不能满足该条件时,沿距离向靠近远距端分布是一种较好的布设方案[9]。本文试验所选数据为3个架次同场景的机载双天线InSAR数据,该组数据按照布点规则沿距离向共布设5个角反射器,其位置如图 3红色标识点,绿色标识点为选取的高程连接点。

|
| 图 3 控制点和高程连接点位置示意图 Fig. 3 Control points and connection points position |
本文对比分析了单场景干涉定标方案和提出的联合定标方案,试验中单场景干涉参数定标选用G13、G15、G17作为控制点,G11和G16作为检查点;联合参数定标选用第1架次的控制点文件作为联合定标的已知数据,假定第2、3架次的控制点未知,进行联合干涉参数定标处理后,最后利用G13、G15、G17、G11和G16 5个控制点作为检查点检测试验结果。两种方案的定标结果如表 1所示,表 2展示了两种方案的精度对比,图 4为两种方案在控制点处的高程误差对比结果。由试验结果可知:
| 第1架次 | 第2架次 | 第3架次 | ||
| 单场景 | Δb | 0.006857 | 0.005204 | 0.008814 |
| 干涉 | Δα | -0.000340 | -0.001130 | 0.001969 |
| 定标 | Δr1 | 3.430285 | 2.761803 | 7.826932 |
| 联合 | Δb | 0.004435 | 0.004435 | 0.004435 |
| 干涉 | Δα | -0.002704 | -0.002188 | -0.001583 |
| 定标 | Δr1 | -2.158147 | -1.115201 | 1.044739 |
| 第1架次 | 第2架次 | 第3架次 | ||
| 单场景 | 控制点 | 3 | 3 | 3 |
| 干涉 | 检查点 | 2 | 2 | 2 |
| 定标 | 高程中误差/m | 0.195904 | 0.615136 | 0.934892 |
| 联合 | 控制点 | 5 | 0 | 0 |
| 干涉 | 检查点 | 26 | 26 | 26 |
| 定标 | 高程中误差/m | 0.581080 | 0.566884 | 0.240695 |

|
| 图 4 两种方案在控制点处的高程误差对比 Fig. 4 GCP height error comparison of two methods |
(1) 多架次同场景联合定标算法能实现一次布标同时标定多架次系统参数的功能,需要的控制点数目少。如表 2中单场景干涉参数定标需要布3次角反射器,共布设15个点,而联合干涉参数定标只需布设1次角反射器,共布设5个点,在大规模测图任务中可以节约大量的人力物力财力,说明联合干涉定标具有很好的实际应用价值。
(2) 在控制点数目较少时,联合干涉参数定标较单场景干涉参数定标具有更好的稳定性。在表 2中单场景干涉定标最后结果的高程中误差差距也较大,如第3架次数据高程中误差达到了0.9m,在图 4中单场景干涉参数定标只在参与定标计算的控制点G13、G15、G17处拟合效果很好,而在检查点G11和G16处高程残差较差,残差最大为1.3m;而联合干涉参数定标则展示了明显的优越性,所有的检查点高程误差均控制在1.1m内。究其原因主要是在控制点数目较少时,受系统参数噪声和敏感度矩阵的病态性等因素的影响,单场景干涉定标方法解算的干涉参数误差较大,得到的定标结果只能保证在控制点处具有较好的拟合效果,不能保证能很好地拟合整景影像的趋势,导致定标后的高程误差有时较大,可信度也较低,而联合干涉参数定标方法通过选取多架次数据间的高程连接点,弥补了稀少控制点的缺陷,减少了系统参数噪声等因素的影响,定标结果可信度更高,拟合效果也较好。
(3) 对于机载双天线干涉系统,基线初始长度由全站仪测量得到,其精度很高,当基线长度小于4m时可视为刚性基线,因此短时间内同一系统的基线改正参数理论上应相同。单场景干涉定标求解的干涉参数只是适用于某一架次数据的最或然值,因此在表 1中单场景定标的基线改正数各不相同,由于毫米级的基线误差将会引起米级的高程误差[2, 6],因此第3架次高程中误差较大,其求解的定标结果不适用于整景影像;而联合干涉参数定标建立联合定标模型时,将所有架次的基线改正数视为相同,定标的结果更符合实际情况,如表 1所示。
(4) 高程连接点的位置对定标结果会产生影响,若连接点均匀分布在图像中,则求解出来的定标结果对整景影像的拟合效果较好。由图 4可知,联合干涉参数定标在检查点G11处高程残差较大,这主要是由选取的高程连接点的位置引起的。由于定标场一般选择在地势较为平坦、最好不要包括河流、湖泊、大面积建筑物等地物的区域,因此定标场内标志性地物较少,这就给高程连接点的选择带来了困难,本文通过局部配准的配准方法和PS点选择方法选取的高程连接点如图 3中绿色标识点,可以看出高程连接点主要集中在图像中的右半部分,最后的定标结果对图像右半部分的拟合效果较好,而G11位于图 3中的左侧,导致该点的高程误差较大。
5 结 论机载InSAR系统可以快速获取大范围区域的数据信息,在地形测绘中发挥着越来越重要的作用,本文通过CASMSAR系统实测机载双天线InSAR数据进行试验,证明了多架次同场景联合参数干涉定标方法能够实现利用一次布设的控制点标定多架次干涉参数的功能,从而大大减少测绘人员野外布标的工作量以及资金的投入。本文提出的方法主要是在高程方向进行参数的标定,以后还可以进一步考虑对地物目标点的三维位置进行参数标定;此外,定标过程中如何实现在整景影像中均匀选取高程连接点并保证提取精度仍是需要解决的关键问题,后续工作还需要评估高程连接点的选取精度对联合干涉参数定标的影响。
| [1] | ROSEN P A, HENSLEY S, JOUGHIN I R, et al. Synthetic Aperture Radar Interferometry[J]. Proceedings of the IEEE, 2000, 88(3): 333-382. |
| [2] | ZHANG Jun. Analysis the Parameters’ Sensitivity on Airborne SAR Interferometric Calibration[D]. Changsha: Central South University, 2011. (张俊. 机载干涉SAR定标参数敏感度分析[D]. 长沙: 中南大学, 2011.) |
| [3] | MAO Yongfei, XIANG Maosheng. Joint Calibration of Airborne Interferometric SAR Data Using Weighted Optimization Method[J]. Journal of Electronics and Information Technology, 2011, 33(12):2819-2824. (毛永飞, 向茂生. 基于加权最优化模型的机载InSAR联合定标算法[J]. 电子与信息学报, 2011, 33(12):2819-2824.) |
| [4] | MALLORQUI J J, BARA M, BROQUETAS A. Sensitivity Equations and Calibration Requirements on Airborne Interferometry[C]//Proceedings of IEEE 2000 International Geoscience and Remote Sensing Symposium. Honolulu:[s.n.], 2000:2379-2741. |
| [5] | WANG Yanping. Studies on Calibration Model and Algorithm for Airborne Interferometric SAR[D]. Beijing: Institute of Electronics Chinese Academy of Sciences, 2004. (王彦平. 机载干涉SAR定标模型与算法研究[D]. 北京: 中国科学院电子学研究所, 2004.) |
| [6] | LI Pin. Research on Methods of Calibration in InSAR System[D]. Beijing: University of Science and Technology of China, 2008. (李品. InSAR系统的定标方法研究[D]. 北京: 中国科学技术大学, 2008.) |
| [7] | JIN Guowang, ZHANG Wei, XIANG Maosheng,et al. A New Calibration Algorithm of Interferometric Parameters for Dual-antenna Airborne InSAR[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(1): 76-81. (靳国旺,张薇,向茂生,等. 一种机载双天线InSAR干涉参数定标新方法[J]. 测绘学报, 2010, 39(1): 76-81.) |
| [8] | HAN Songtao. Study on Key Technology of Data Processing for Airborne Dual-antenna InSAR System[D]. Beijing: Institute of Electronics, Chinese Academy of Sciences, 2010. (韩松涛. 机载双天线干涉SAR数据处理关键技术研究[D]. 北京: 中国科学院电子学研究所, 2010.) |
| [9] | HU Jiwei, HONG Jun, MING Feng,et al. The Strategy of GCPs Select and Error Transfer Manner among Calibration Method for Airborne InSAR based on Bundle Adjustment[J]. Remote Sensing Technology and Application, 2011, 26(3), 270-276. (胡继伟,洪峻,明峰,等. 基于区域网平差的机载InSAR定标方法中控制点的选取策略及误差传递关系分析[J]. 遥感技术与应用, 2011, 26(3), 270-276.) |
| [10] | MAO Yongfei, XIANG Maosheng, WEI Lideng. A Block Positioning Method for Airborne InSAR System[J]. Journal of Electronics and Information Technology, 2012, 34(1), 166-171. (毛永飞,向茂生,韦立登. 一种机载干涉SAR区域网平面定位算法[J]. 电子与信息学报, 2012, 34(1), 166-171.) |
| [11] | HU Jiwei, HONG Jun, MING Feng,et al. Model-based CP Selection Method for Calibration of Airborne InSAR with Sparse GCPs[J]. Journal of Radars, 2012, 1(4), 441-445. (胡继伟,洪峻,明峰,等. 基于模型的稀疏控制点机载InSAR定标中CP连接点选取方法[J]. 雷达学报, 2012, 1(4), 441-445.) |
| [12] | ZHANG Wei, JIN Guowang, XIANG Maosheng. Study on United Calibration of Multi-strips InSAR Data under the Sparse Control in Large Area[J]. Remote Sensing Technology and Application, 2013, 28(1): 18-26. (张薇,靳国旺,向茂生. 大区域稀疏控制条件下的多条带InSAR数据的联合定标研究[J]. 遥感技术与应用, 2013, 28(1): 18-26.) |
| [13] | WILKINSON A J. Techniques for 3D Surface Reconstruction Using Radar Interferometry[D]. London: University of London, 1997. |
| [14] | MADSEN S N, ZEBKER H A, MARTIN J. Topographic Mapping Using Radar Interferometry: Processing Techniques[J]. IEEE Transactions on Geoscience and Remote Sensing, 1993, 31(1): 246-256. |
| [15] | GOBLIRSCH W. The Exact Solution of the Imaging Equations for Cross-track Interferometers[C]//Proceedings of IEEE Geoscience and Remote Sensing Symposium.Singapore:[s.n.], 1997: 437-441. |
| [16] | LIANG Fei. Study on Calibration Experiment of Airborne Interferometric SAR[D]. Beijing: Beijing Jiaotong University, 2011. (梁菲. 机载干涉SAR定标方法[D]. 北京: 北京交通大学, 2011.) |
| [17] | WANG Lei, PENG Hailiang. Experimental Study on Repeat-pass Airborne SAR Interferometry[J]. Journal of Electronics and Information Technology, 2002, 24(12): 1939-1946. (王磊,彭海良. 重复飞行机载干涉SAR的试验研究[J]. 电子与信息学报, 2002, 24(12): 1939-1946.) |
| [18] | SHI Ruilong, JING Linjiao, SONG Fuming,et al. Pepeat-pass Interferometry with Airborne Synthetic Aperture Radar[J].Journal of Electronics and Information Technology, 2003, 25(11): 1519-1524. (师瑞龙,荆麟角,宋福明,等. 机载SAR重复轨道干涉成像试验结果[J]. 电子与信息学报, 2003, 25(11): 1519-1524.) |
| [19] | WANG Lucai, WANG Yaonan, MAO Jianxu. Registration of InSAR Image Based on Integrating Correlation-Registration and Max-spectrum Image Registration[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(4): 320-324.(汪鲁才,王耀南,毛建旭. 基于相关匹配和最大谱图像配准相结合的InSAR复图像配准方法[J]. 测绘学报, 2003, 32(4): 320-324.) |
| [20] | FERRETTI A, PRATI C, ROCCA F.Analysis of Permanent Scatters in SAR Interferometry[C]//Proceedings of the IEEE 2000 IGRASS.Hawaii: IEEE,2000: 761-763. |
| [21] | FERRETTI A, PRATI C, ROCCA F.Permanent Scatters in SAR Interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2001, 39(1): 8-20. |
| [22] | FAN Hongdong. Study on Several Key Algorithms of InSAR Technique and Its Application in Land Subsidence Monitoring[D]. Xuzhou: China University of Mining Technology, 2010. (范洪冬. InSAR若干关键算法及其在地表沉降监测中的应用研究[D]. 徐州: 中国矿业大学, 2010.) |
| [23] | DING Wei. Study of PSInSAR on the Technique of Points Selection and Phase Unwrapping[D]. Changsha: Central South University, 2011. (丁伟. PSInSAR点目标提取及相位解缠技术研究[D]. 长沙: 中南大学, 2011.) |