


1 引 言
月球是距离地球最近的天体,长期以来备受科学界的关注。21世纪初,各航天大国(组织)开始了以重返月球为目标的新一轮探月行动[1]。我国“嫦娥一号”和“嫦娥二号”在观测数据覆盖范围和分辨率等方面均有较大提高[2],为深入研究撞击坑的空间分异定律、线性构造和环形构造的分布特征提供了可靠的数据基础[3, 4, 5, 6, 7]。各国对探月数据的利用也日益增加,文献[8]对嫦娥一号激光高度计交叉点分析与平差处理进行了研究。文献[9]利用SELENE的数据对月球背面的重力场进行了研究。
在月表复杂的地形地貌中,撞击坑是最为典型的地貌单元和基本的地貌形态,它的形态特征和空间分布对于进一步研究月球具有重要意义。文献[10]利用霍夫变换对MOLA数据分析处理,得到直径大于10km的撞击坑75%以上。文献[11]提出一种基于广义霍夫变换(GHT)的椭圆检测方法对小行星撞击坑进行识别。文献[12]在利用撞击坑实现空间飞行器光学导航的研究中,采用了二次曲线拟合方法对小行星撞击坑进行自动识别,成功识别90%的撞击坑,并将错分率控制在5%以下。文献[13]基于光照梯度信息,利用嫦娥一号CCD图像,采用最小二乘法拟合边缘椭圆的方法实现对撞击坑的提取。文献[14]提出一种基于互相关的模板匹配方法,通过标准化互相关法对测试图像进行计算。文献[15]采用连续可伸缩模板匹配算法对Clementine月海地区数据进行试验。文献[16]利用Ecognition软件对Clementine的可见光/近紫外波段影像数据进行撞击坑识别研究。
考虑到现阶段月球撞击坑的提取大部分是基于影像的,有较大的误提取率,且很少对撞击坑的类型进行自动判别。本文提出了融合CCD影像与DEM数据的月球撞击坑自动提取与识别的算法。该算法的数据基础为CCD影像与DEM数据,在CCD影像中快速提取撞击坑的位置等基本信息,结合DEM数据对影像误提取结果进行剔除,提取出准确的撞击坑参数,识别出撞击坑的类型。
2 CCD影像中基于条件匹配的撞击坑自动提取在太阳光照条件下,撞击坑影像特征具有一定的规律[17]。其影像特征(图 1)规律为:①边缘近似圆形;②亮区和暗区的中心连线与光照方向大致平行;③区域面积的大小与明暗区域距离的比值在一定范围内波动;④ 亮区和暗区灰度变化值较小。

|
| 图 1 撞击坑的影像特征 Fig. 1 Image features of craters |
基于CCD影像撞击坑的自动提取主要是基于上述4个影像特征的。本文CCD影像提取撞击坑的主要思路如图 2所示。

|
| 图 2 CCD影像撞击坑提取流程图 Fig. 2 Flowchart of the extraction of craters in CCD image |
对CCD影像进行阈值分割,Otsu分割算法[18]是一种常用的阈值分割算法。针对本文的实际情况,需将原始影像进行双阈值分割,分别在暗区[0, 127]和亮区[128, 255]进行阈值分割,可以得到两个阈值T1和T2。灰度值在[0,T1]的为暗区,在[T1+1,T2)的为背景区,在[T2,255)的为亮区。样本区域影像进行阈值分割结果如图 3所示。

|
| 图 3 样本区阈值分割效果图 Fig. 3 The image of threshold segmentation |
对阈值分割后的影像进行区域生长[19],得到影像明暗区域编号。对编号的明暗区域进行条件匹配,同一撞击坑的亮区与暗区需满足匹配条件
式中,θ为撞击坑明暗区连线与光照方向之间的夹角;s为明暗区像素点总数与以亮暗区中心坐标为半径圆的面积之比;Sa为暗区像素数量(Sb反之);r为明暗区中心距;p为明暗区像素数目之比的最小值。
对边缘点进行最小二乘法圆的拟合,提取出撞击坑。图 4为样本区影像撞击坑边缘拟合结果。

|
| 图 4 撞击坑边缘提取与拟合 Fig. 4 Edge extractions and fittings of craters |
CCD影像提取撞击坑主要是以其影像特征为基础的。由于月球表面不同区域的光照条件不一致,基于CCD影像撞击坑的提取会出现一定的误提取率。本文通过提取撞击坑相应的DEM数据[20],确定坑壁范围,然后对坑壁点的坡向值进行统计分析,对影像误提取结果进行剔除。
3.1 坑壁范围确定与坡向值计算坡度反映了地形的倾斜和陡峭程度,撞击坑内侧较陡坡度约为25°~50°,平均为35°,外侧较缓坡度约为3°~8°。从坑外缘到坑内位置,坑壁的坡度最大,由图 4可以看出,坑壁在横剖面呈对称结构。通过DEM数据可以获得撞击坑范围内的坡度指数,通过对撞击坑坡度的分析,可以得到坑壁范围内的点云数据(默认为坡度在25°~50°之间)。具体流程如下:
(1) 坡度与坡向的计算[21],地表某点的坡度S和坡向A是地形曲面函数Z=f(x,y)在东西方向、南北方向高程变化率的函数
式中,fx为东西方向高程变化率;fy为南北方向高程变化率 式中,g为DEM格网间隔(本文试验数据为500m);下标为4、6代表西东相邻的点,下标为2、8代表北南相邻的点(式(6)同)。
(2) 将坡度指数在25°~50°内的点提取出来。
3.2 基于相邻坡向差值分析的误提取剔除撞击坑的坡向值在0°~360°分布连续。但是在实际中,撞击坑在各坡向分布的点密度并不均匀,因此,直接针对坡向的统计会有一定的偏差。本文通过将坑壁坡向值(0°~360°)进行从小到大排序,再计算相邻(坡向)之间坡向值的差值,对差值进行统计计算,这样可以避免取样的不均匀性。分别对撞击坑和非撞击坑(残缺撞击坑模拟)进行分析(图 5),从图中可知非撞击坑坑壁坡向值的差值在110°左右发生了突变。撞击坑的差值分布稳定、连续;非撞击坑坑壁坡向差值会有突变,并会对其均值和方差造成较大的影响。可以通过计算其变异系数进行定量的判断,变异系数计算公式为
式中,C.V为坡向差值的变异系数;σ为坡向差值标准差;μ为坡向差值均值。变异系数越大突变越明显,对撞击坑变异系数一般不超过2(接近0)。图 5中的变异系数分别为1.19、9.49。

|
| 图 5 撞击坑与非撞击坑坑壁相邻坡向差值统计图 Fig. 5 The adjucent pit aspect’s statistical difference of craters and non-craters |
与影像数据相比,DEM数据能够直观地表示撞击坑的三维地形结构,适合应用于撞击坑的定量信息的提取和撞击坑的识别研究中。
4.1.1 计算点的法向给定一个N值,给定点pi=(xi,ni),通过它的邻近点集qj(xj,vj)(1≤j≤N)求出点pi的近似切平面,然后求点pi的近似法向量,使得v=∑j=1N((xj-xi)·ni)2最小。应用最小二乘法,可以得到以下3×3矩阵

将c的最小特征值对应的特征向量单位化即可作为法向量ni的近似值。
4.1.2 基于法向量突变的边缘点提取与拟合撞击坑边缘点的法向量具有突变性。法向量变化率k的表达式为
式中,dx为东西方向法向量变化率;dy为南北方向法向量变化率;c为点的单位法向量。
坑壁点云法向量与水平面之间的夹角分布集中,边缘点法向量与水平面之间的夹角主要集中在90°,通过坑壁点云法向量与地面之间夹角平均值θ0与90°的差值作为法向量变化率的阈值,边缘点法向量变化率k应满足下面的条件
提取边缘点(图 6),对边缘点由最小二乘法进行拟合,得到圆的参数a、b、r。(a,b)为撞击坑的中心坐标,r为撞击坑的半径(单位为m)。 4.2 基于剖面线的撞击坑类型的识别
撞击坑主要分为简单碗型撞击坑、复杂撞击坑(包括中央隆起型坑、平底复杂撞击坑),以及单环或多环盆地3种主要类型(图 6)。

|
| 图 6 撞击坑类型 Fig. 6 Types of craters |
简单碗形坑,具有碗型形态,一般直径不超过20km。一般形成于月壤较厚区域,坑内壁平滑、坡度稳定、坑底相对面积较小、深径比(depth-diameter ratio)较大。复杂撞击坑主要有中央隆起型坑和平底型撞击坑两种。撞击坑的形态在直径15km左右开始由简单坑趋向复杂坑,中央隆起坑的直径一般大于35km,在坑的中央有明显的突起,高度略低于坑壁。单环或多环撞击盆地,具有高度发育的多重环状结构,坑壁有明显的坍塌现象,结构复杂多变,直径175~450km,部分直径大于400km。
本文主要针对简单撞击坑与复杂撞击坑及其从属类型的撞击坑予以识别。复杂撞击坑与简单撞击坑相比,坑底区域所占面积比例较大,复杂撞击坑坑底区域所占比例大于20%,而简单撞击坑比例则小于20%。对于复杂撞击坑中平底型撞击坑与中央隆起型的撞击坑,可以通过撞击坑的剖面线特征进行识别,平底型撞击坑与中央隆起型撞击坑的剖面线特征见图 7平底撞击坑的剖面线一共有两个波峰,波峰位置主要在两端,中央隆起型撞击坑的波峰一般至少有3个波峰,通过撞击坑剖面线的波峰的数量和位置可以进行复杂撞击坑类型的判断。

|
| 图 7 复杂撞击坑剖面线 Fig. 7 The hatch of complex craters |
本文试验所用的影像数据和DEM数据均来自“嫦娥一号”,主要通过向探月工程数据发布系统申请获取。其中,CCD影像数据的分辨率为120m,DEM的空间分辨率为500m。
5.1 CCD影像撞击坑的提取结果对两幅试验CCD影像进行撞击坑的自动提取,两幅影像经纬度分布范围为22°W-27°W、67°S-72°S。分别对两幅影像进行阈值分割、区域生长、条件匹配、边缘提取及拟合等处理,得到CCD影像提取的结果。试验影像撞击坑的提取过程与结果见图 8。在结果影像中红色圆圈为自动提取结果,蓝色圆圈为未提取出的撞击坑,蓝色方块为误提取撞击坑。

|
| 图 8 试验影像撞击坑的提取 Fig. 8 The extraction of experimental craters from CCD image |
表 1对两幅试验影像提取结果进行了统计,主要与人工提取进行了对比。其中,人工提取为通过肉眼识别的撞击坑数量;自动提取为算法提取出的撞击坑数量;误提取为算法提取出的非撞击坑数量;漏提取为算法未提取到的撞击坑数量。
| 试验影像1 | 试验影像2 | |
| 影像大小 | 512像素×451像素 | 512像素×401像素 |
| 人工提取/个 | 180 | 59 |
| 自动提取/个 | 160 | 56 |
| 误提取/个 | 6 | 5 |
| 漏提取/个 | 14 | 2 |
| 提取率/(%) | 81.1 | 86.4 |
DEM的分辨率(500m)小于影像的分辨率,影像提取的直径较小的撞击坑在DEM中不能识别,因此,本文针对直径大于10km的撞击坑进行识别。选取虹湾附近区域的CCD影像,通过影像获得的提取结果见图 9。

|
| 图 9 虹湾附近区域影像撞击坑提取结果 Fig. 9 The extraction of experimental craters from CCD image nearby rainbow bay |
影像共提取出了10个直径大于10km的撞击坑,分别对10个撞击坑进行判断。首先,提取出影像结果的撞击坑点云数据;然后,提取出撞击坑的坑壁点,对坑壁相邻(大小)坡向的差值进行统计分析,得到影像误提取撞击坑剔除的结果(表 2)。目前DEM的分辨率还较低,对影像提取结果的判断范围十分有限,随着DEM分辨率的不断提高,对影像误提取撞击坑的剔除效果会越来越明显。
| 坑编号 | 均值/(°) | 标准差/(°) | 变异系数 | 撞击坑 |
| 1 | 2.06 | 2.63 | 1.28 | 是 |
| 2 | 2.37 | 10.16 | 4.27 | 否 |
| 3 | 0.21 | 0.33 | 1.57 | 是 |
| 4 | 1.15 | 1.91 | 1.66 | 是 |
| 5 | 0.19 | 0.25 | 1.32 | 是 |
| 6 | 0.66 | 0.86 | 1.30 | 是 |
| 7 | 2.27 | 1.99 | 0.88 | 是 |
| 8 | 1.57 | 1.84 | 1.17 | 是 |
| 9 | 0.08 | 0.10 | 1.25 | 是 |
| 10 | 0.30 | 0.37 | 1.23 | 是 |
提取出经过误提取筛选后的9个撞击坑的DEM数据,计算点云的法向量变化率,提取撞击坑的边缘点,对边缘点进行拟合得到撞击坑的基本参数(表 3)。统计撞击坑坑底点云所占比例的大小来判断撞击坑的基本类型。若撞击坑为复杂撞击坑,再通过剖面线的形态特征来判断该撞击坑是平底型撞击坑,还是中央隆起型撞击坑。表 2的3、5、9、10号撞击坑为复杂撞击坑。其中,9号撞击坑的剖面线有两个较为明显的波峰,在坑底区域有明显的凸起区域。因此,9号撞击坑为中央隆起型撞击坑。
| 撞击坑影像(1-10) | 中心坐标/m | 半径/m | 坑底点云所占比例/(%) | 剖面线 | 类型 |
 | (-1272066,1815745) | 6005 | 15.26 | - | 简单型 |
 | - | - | - | - | 非撞击坑 |
 | (-1400212,1794823) | 11221 | 33.24 | 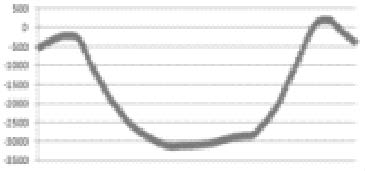 | 复杂(平底型) |
 | (-1305801,1782407) | 8036 | 10.80 | - | 非撞击坑 |
 | (-1236288,1789932) | 15128 | 31.87 | 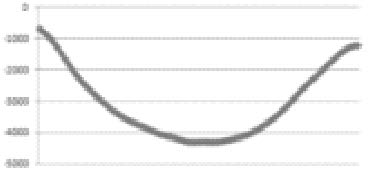 | 复杂(平底型) |
 | (-1369381,1746530) | 6931 | 6.28 | - | 简单型 |
 | (-1330090,1707636) | 5398 | 10.39 | - | 简单型 |
 | (-1374540,1688189) | 7318 | 4.83 | - | 简单型 |
 | (-1319691,1600254) | 23630 | 24.79 | 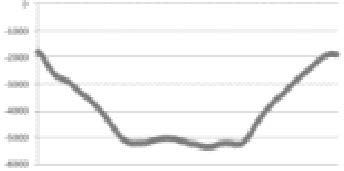 | 复杂(中央隆起型) |
 | (-1210683,1531463) | 12078 | 20.03 | 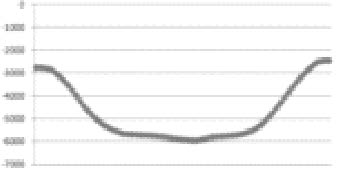 | 复杂(平底型) |
本文针对现阶段月球撞击坑定量信息提取不足和误提取的问题,提出利用太阳光照条件下撞击坑在影像中的特征,通过条件匹配实现撞击坑的自动提取撞击坑;分析了撞击坑坑壁点坡向分布的连续性,对影像误提取结果进行剔除;根据撞击坑边缘点法向量的突变性,提取撞击坑的边缘点,并通过拟合计算出撞击坑的参数;通过坑底点云所占比例以及剖面线特征识别撞击坑,并利用“嫦娥一号”的数据进行了验证。
本文提出的方法在CCD影像的提取中,主要对简单和复杂撞击坑进行了识别,尚未实现对单环或多环盆地的识别。“嫦娥二号”数据相比较于“嫦娥一号”数据分辨率更高,具有更好的试验效果和意义。因此,下一阶段将主要以“嫦娥二号”数据为基础,在CCD影像提取中实现条件参数的自动设定,实现对坑链等其他地质构造的提取与识别。
| [1] | OUYANG Ziyuan, LI Chunlai. The Progress and the Development Strategy of Deep Space Exploration in Our Country[J]. Chinese Aerospace, 2002 (12): 28-32. (欧阳自远, 李春来. 深空探测的进展与我国深空探测的发展战略[J]. 中国航天, 2002 (12): 28-32.) |
| [2] | LI Chunlai, LIU Jianjun, REN Xin, et al. The Image Data Processing of Chang’e-1 and the Image Mapping to the Moon[J]. Chinese Science: D, 2010 (3): 294-306. (李春来, 刘建军, 任鑫, 等. 嫦娥一号图像数据处理与全月球影像制图[J]. 中国科学: D 辑, 2010 (3): 294-306.) |
| [3] | CHEN Shengbo, MENG Zhiguo, CUI Tengfei, et al. The Mapping to Geological Analysis by Lunar Satellite Remote Sensing in Rainbow Ray Area[J]. Chinese Science: Physics Mechanics Astronomy, 2010(11):1370-1379. (陈圣波, 孟治国, 崔腾飞, 等. 虹湾地区月球卫星遥感地质解析制图[J]. 中国科学: 物理学力学天文学, 2010(11):1370-1379.) |
| [4] | CHABOT N L,HOPPA G V,STROM R G.Analysis of Lunar Lineaments:Far Side and Polar Mapping[J].Icarus,2000,147(1):301-308. |
| [5] | MOROTA T, FURUMOTO M. Asymmetrical Distribution of Rayed Craters on the Moon[J]. Earth and Planetary Science Letters, 2003, 206(3): 315-323. |
| [6] | URBACH E R, STEPINSKI T F. Automatic Detection of Sub-km Craters in High Resolution Planetary Images[J]. Planetary and Space Science, 2009, 57(7): 880-887. |
| [7] | HAWKE B, BLEWETT D T, LUCEY P G, et al. The Origin of Lunar Crater Rays[J]. Icarus, 2004, 170(1): 1-16. |
| [8] | HU Wenmin,DI Kaichang,YUE Zongyu, et al. Crossover Analysis and Adjustment for Chang’E-1 Laser Altimeter Data[J].Acta Geodaetica et Cartographica Sinica,2013,42(2):218-224.(胡文敏, 邸凯昌, 岳宗玉, 等. 嫦娥一号激光高度计数据交叉点分析与平差处理[J]. 测绘学报, 2013, 42(2): 218-224.) |
| [9] | NAMIKI N, IWATA T, MATSUMOTO K, et al. Farside Gravity Field of the Moon from Four-way Doppler Measurements of SELENE (Kaguya)[J]. Science, 2009, 323(5916): 900-905. |
| [10] | MICHAEL G G. Coordinate Registration by Automated Crater Recognition[J]. Planetary and Space Science, 2003, 51(9): 563-568. |
| [11] | LEROY B, MEDIONI G, JOHNSON E, et al. Crater Detection for Autonomous Landing on Asteroids[J]. Image and Vision Computing, 2001, 19(11): 787-792. |
| [12] | CHENG Y, JOHNSON A E, MATTHIES L H, et al. Optical Landmark Detection for Spacecraft Navigation[C]//Proceedings of the 13th Annual AAS/AIAA Space Flight Mechanics Meeting.Ponce:[s.n.],2003:1785-1803. |
| [13] | FENG Junhua, CUI Hutao, CUI Pingyuan, et al. Autonomous Crater Detection and Matching on Planetary Surface[J]. Journal Of Aeronautics, 2010, 31(9):1858-1863. (冯军华, 崔祜涛, 崔平远, 等. 行星表面陨石坑检测与匹配方法[J]. 航空学报, 2010, 31(9):1858-1863.) |
| [14] | MAGEE M, CHAPMAN C R, DELLENBACK S W, et al. Automated Identification of Martian Craters Using Image Processing[C]//Proceedings of the 34th Annual Lunar and Planetary Institute Science Conference.League:[s.n.],2003:17-21. |
| [15] | BURL M C, STOUGH T, COLWELL W, et al. Automated Detection of Craters and Other Geological Features[C]//Proceedings of the 6th International Symposium on Artifical Intelligence, Robotics and Automation in Space.Montreal:[s.n.],2001:1-8. |
| [16] | YUE Zongyu, LIU Jianzong, WU Ganguo. Lunar Craters’ Automatic Identification by Object-oriented Classification Method[J]. Chinese Science Bulletin, 2008, 53(22): 2809-2813. (岳宗玉, 刘建忠, 吴淦国. 应用面向对象分类方法对月球撞击坑进行自动识别[J]. 科学通报, 2008, 53(22): 2809-2813.) |
| [17] | JIN Lihua, JIN Shengye, CHEN Shengbo, et al. Characteristics of Lunar Craters on the First Image of Chang’e-1 Satellite[J]. Journal of Jilin University, 2009 (5): 942-946. (金丽华, 金晟业, 陈圣波, 等. “嫦娥一号” 第一幅月面遥感影像撞击坑特征[J]. 吉林大学学报: 地球科学版, 2009 (5): 942-946.) |
| [18] | LI Zhengrong, LIU Xiaoping, LI Ziyuan, et al. Research of the Method for Multi-threshold Value in Image Segmentation[J]. CT Computerized Tomography Theory and Applications, 2006, 15(4): 13-17.(李峥嵘, 刘晓平, 李自元, 等. 图像分割多阈值法研究[J]. CT 理论与应用研究, 2006, 15(4): 13-17.) |
| [19] | YU Songyu,ZHOU Yuanhua,ZHANG Rui,et al.Digital Image Processing[M].Shanghai:Shanghai Jiao Tong Univevsity Press,2007:306-310.(余松煜,周源华,张瑞,等.数字图像处理[M].上海:上海交通大学出版社,2007:306-310.) |
| [20] | CUI Tengfei, CHEN Shengbo, WANG Jingran. Three-Dimensional Modeling of the Lunar Surface Based on Stereo Camera Onboard Chang’e Orbiter[J]. Remote Sensing for Land and Resources, 2009, 21(4): 31-34. (崔腾飞, 陈圣波, 王景然.基于 “嫦娥” 卫星三线阵 CCD 立体相机的月球表面三维建模[J]. 国土资源遥感, 2009, 21(4): 31-34.) |
| [21] | CHEN Yanli, LI Shaomei, LIU Daiyue. Analysis of Slope and Aspect Based on Regular Grid DEM[J]. Geomatics and Spatial Information Technology, 2009, 32(5): 36-39. (陈艳丽, 李少梅, 刘岱岳. 基于规则格网 DEM 的坡度坡向分析研究[J]. 测绘与空间地理信息, 2009, 32(5): 36-39.) |