



Corresponding author:ZHU Junfeng E-mail: junfengzhu@whu.edu.cn
1 引 言
随着遥感技术的发展,通过航空或航天拍摄方式迅速获取大量遥感数据已变得比较容易。目前一些新技术和方法也正走向成熟,如在传感器上集成IMU/GPS,或在稀少控制点和无控制点条件下进行空三解算,可实时或后处理计算获取摄影机内外方位元素;在此基础上,利用传统的摄影测量测图的工作生产流程,可方便地获得数字正射影像(DOM)和数字高程模型(DEM)。
作为重要的基础地理信息产品,DOM和DEM产品常被分别用于平面及地形高程的量测。但由于传统正射纠正过程中利用的是定向后的影像和DEM,而非具有地物信息的数字表面模型(DSM),这会引起建筑物倾斜、变形、遮挡等问题。这种现象在大比例尺城市正射影像中尤为严重(如图 1,利用公式(1)、(2),可知在摄影高度H=500 m 时,建筑物高度h=50 m的屋顶每10 m的平面测图误差为1.1 m),大大影响了DOM在数据更新及城市规划等领域的应用。

|
| 图 1 直接利用城市DOM测图产生的建筑物基底遮挡及屋顶位置和大小的变化 Fig. 1 The roof corner point displacement due to building relief on an orthoimage |
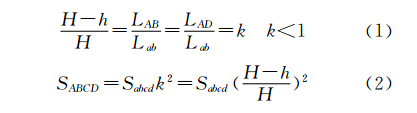
式中,H为相机高度;h是地面高度;LAB、LAD、Lab、Lad是各条边的长度;SABCD和Sabcd分别是面“A-B-C-D” 和“a-b-c-d”的面积;k是变形比例。
为了能够在DOM获得地物的真实三维坐标,国内外一些学者提出制作真正射影像(true-orthophoto)来替代传统的DOM[1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17]。所谓真正射影像,是同时消除了地形投影差和三维目标投影差的正射影像[14, 17],其中,文献[19]提出了一套完整的利用真正射影像和数字表面模型获取地物真实三维坐标的方法构建数字城市的方法。但是制作真正射影像往往难度大、耗时耗力。法国地理院开发的数字摄影测量处理系统像素工厂 (pixel factory,PF)是为数不多的能够制作真正射影像的商用软件。但是利用PF自动生成的真正射影像依然需要一些必要的编辑处理才能满足实际需要[8, 16]。另外,还有学者提出利用“左”、“右”正射影像进行像点坐标的三维量测以获得真实地面三维坐标,但是这种方法需要同时具备“左”、“右”正射影像,对经镶嵌后的正射影像并不适用,且计算方法因需要迭代而效率不高[18]。
虽然传统大比例尺城市DOM相比真正射影像存在建筑物倾斜等明显缺陷,但却保留了摄影成像时的几何中心投影关系。利用这种特点,本文提出一种“可量测的”影像高程同步模型(orthoimage elevation synchronous model,OESM)——利用DEM和数字表面模型,获取DOM每个单元的高程信息,以还原其真实三维建筑物场景几何关系。利用OESM模型,可在DOM上获取每个单元的真实平面位置信息以及高程位置,从而实现“单片量测”。在OESM模型的基础上,DOM不仅可以实现真正射影像的测图功能,还可利用高程信息直接应用于大比例尺城市测图中的建筑物重建。建筑物重建常采用的一般方法如基于地面测量或航空立体像对测图以提取建筑物三维信息,需要投入大量的人力、物力,速度慢,效率低,不能快速反映城市发展的现状信息[16, 19]。本文的方法避免传统摄影测量立体测图引起的繁复操作,可以提高人力测图效率。
本文第2部分介绍OESM模型的几何特性、生产步骤以及OESM模型生产的实例;在此基础上,第3部分讨论基于OESM模型的城市建筑物量测和重建方法,并给出了试验结果;第4部分对OESM的模型精度和三维测图精度进行了试验验证和评价;第5部分对OESM模型的效率和精度进行了讨论,并与真正射影像的制作进行了对比分析。
2 OESM模型
2.1 OESM模型的几何特性
在经过DEM校正得到城市DOM上,高大的建筑物的墙面倾倒至地表,并不包含高程信息。本文中,OESM模型存储了DOM上每一单元的真实高程信息,从而形成建筑物等地物目标的真实三维表达。其中,地形表面的高程信息来自于DEM,而高出地表的目标的高程信息则来自于DSM。
图 2给出了OESM模型与真实场景的几何关系的一维截面图:对于DOM上任意一单元PDOM,从透视投影中心S指向该单元的“光束”将穿过DSM和DEM表面,并产生交点PDSM(XDSM,YDSM,ZDSM)、PDEM(XDEM,YDEM,ZDEM):
(1) 当“光束”先与DSM相交于PDSM,后与DEM相交于PDEM,且ZDEM≠ZDSM,则“光束”与OESM的交点可定义为POESM(XDEM,YDEM,ZDSM),它的(x-y)坐标与PDEM的(x-y)坐标相等,z-坐标与PDSM的高程坐标相等。
(2) 若“光束”与DSM的交点PDSM(XDSM,YDSM,ZDSM)的z-坐标与DEM的交点PDEM(XDEM,YDEM,ZDEM)的高程坐标一致,即ZDEM=ZDSM,OESM则降级为普通的DEM,其坐标为POESM(XDEM,YDEM,ZDEM)。
从图 2中可以看出,建筑物墙体在OESM中看起来仍是倾斜的,因其保留了原始的几何投影关系。

|
| 图 2 OESM模型与真实场景的几何关系的一维截面图 Fig. 2 Illustration of the elevation profile of an OESM in a real scene |
2.2 OESM模型的生产步骤
OESM模型的生产是一个DEM和DSM间几何投影关系重建的过程,其流程主要分为数据获取、OESM模型构建、多余点去除和栅格化处理四大部分。
2.2.1 数据获取本文OESM模型的生产需要原始影像的内外方位元素以及后续生产获得的同一区域的DEM、DSM、DOM。
2.2.2 OESM模型构建DSM和DEM是基于同一原始几何投影关系的产品,且DOM是利用DEM正射纠正的结果。所以,DSM、DEM和DOM三者间存在着严密的数学关系。OESM模型的计算步骤如下。
步骤1:对每一个DSM单元PDSM(XDSM,YDSM,ZDSM),根据摄影测量学[20]中的共线方程计算得到对应的像平面坐标Ixy(x,y),见下
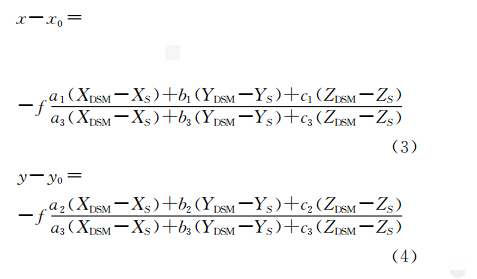
式中,XS、YS、ZS为摄影时刻的方位线元素;a1、a2、a3、b1、b2、b3、c1、c2、c3为旋转矩阵的参数;x0、y0为相机内方位元素,即像主点的偏移量。
步骤2:利用公式(5)、(6)解算从该原始影像像素坐标Ixy(x,y)到DEM相应单元的地面点地理坐标(XDEM,YDEM)。这里,高程ZDEM的取值是个迭代逼近的过程
公式(5)、(6)是公式(3)、(4)的逆变换,XS、YS、ZS和a1、a2、a3、b1、b2、b3、c1、c2、c3的符号意义与公式(3)、(4)的相同。
步骤3:根据步骤1—2,获得该PDSM点对应的OESM点即为POESM(XDEM,YDEM,ZDSM),PDSM点对应的DOM点地理坐标为(XDEM,YDEM)。
步骤4:转入下一个DSM单元,重复以上步骤,直到遍历所有DSM单元。
2.2.3 多余点去除
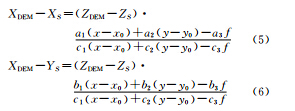
DEM只包含了地形的高程信息,不能提供地表建筑物和其他地物的高程信息。由DEM纠正获得的DOM,尤其是大比例尺的城市的DOM必然存在建筑物遮挡现象。对于每一个OESM点必定落在某个DOM单元PDOM(I,J)之中,可用公式(7)、(8)计算而得
式中,I、J为DOM某一单元的行列号;X0与Y0是DOM的起始坐标;dx与dy是DOM在行列方向的分辨率;XOESM、YOSEM为OESM点的平面坐标。
基于上一节的OESM计算步骤,存在两种情况会产生多余的OESM点,见图 3。

|
| 图 3 一个DOM单元中存在多个OESM点情况示例 Fig. 3 An example of more than one OESM points in a DOM unit |
(1) 当投影“光线”穿过建筑物,即与DSM存在多个交点时,对应DOM某一遮挡处的分辨单元会包含多个OESM点,它们具有不同的高程信息。
(2) 同时,当另一束“光束”与DSM另一个单元相交之后又落入该DOM单元,也会造成一个DOM单元里含有多个OESM点。
为了保持OESM模型与DOM影像信息的一致性,应去除OESM里这样的多余点,本文仅保留格网中高程最大者为该网格单元唯一OESM点。
2.2.4 模型栅格化处理
为了最终获得与含影像信息的DOM“地理对应”的OESM产品,使每个DOM单位都能获得对应的真实高程,还需要进行模型的栅格化处理。首先,利用前面获得的OESM点进行Delaunay不规则三角网(TIN)构建;然后,将TIN转换为与DOM分辨率相当的栅格表达模型;最后,对栅格模型进行灰度赋值,其灰度信息来自对应OESM点的高程值。
2.3 OESM模型的生产实例
本文以河南安阳的城区遥感数据为例,进行OESM模型的成产。原始数据的获取来自一套LiDAR+CCD相机+POS(position and orientation system)集成系统——Trimble’s H56。
LiDAR获取的点云数据(点云密度约25 pts/m-2)可生成DSM;DSM经过进一步滤波处理可获得对应的DEM;集成的POS(position and orientation system )设备获取了外方位元素做初值,后通过空三解算得到准确方位元素;原始遥感图像来自于CCD相机,空间分辨率为0.06 m;利用遥感图像和DEM经摄影测量处理生成DOM。
本文利用以上数据制作分辨率为0.5 m的OESM产品24幅,共耗时504 s,平均每幅耗时21 s(包括读写数据的时间)。该数据在处理器为Intel(R) Xeon(R) CPU E5-2680,主频为2.7 GHz,操作系统为win7 64 bit的计算机上获得。图 4给出了OESM模型生产的实例结果。

|
| 图 4 OESM模型产品 Fig. 4 The result of the generated OESM |
3 OESM模型用于大比例尺城市测图
OESM模型包含了还原真实三维几何场景的关键要素:POESM(XDEM,YDEM,XDSM)。OESM模型一旦生成后,可作为摄影测量生产中的辅助产品,方便地获取对应DOM上某一点的真实三维位置。
在三维数字城市建设、城区规划中,城市建筑物是重点。在传统的摄影测量处理中,一般采用立体像对测图来提取建筑物的三维信息,但需要投入大量的人力、物力,速度慢、效率低,不能反映城市发展的现状信息。本节将讨论如何在OESM模型的基础上,实现在大比例尺城市DOM上对建筑物的精确单片量测和快速重建的方法。
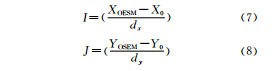
当给定DOM和对应的OESM模型,根据图 2中的几何投影关系,利用OESM的点坐标POESM(XDEM,YDEM,ZDSM)可以方便地还原DOM上某点的三维位置信息,即对应的DSM点坐标POESM(XDEM,YDEM,ZDSM),见下式
式中,(XS,YS,ZS)为投影中心S的三维坐标;(XDEM,YDEM,ZDEM)为对应DEM点的三维坐标;(XDEM,YDEM,ZDSM)为对应DSM的三维坐标。
在DOM上,一旦获得了一个建筑物的屋顶的平面和高程信息,利用DEM即可方便快速地建立起一个简单的建筑物三维模型。这是一个半自动的过程,使用矢量化制图工具在DOM上勾绘建筑物屋顶的轮廓线,得到一个带高程Z值的平面矢量图形文件,再利用DEM的地形高程信息,自动计算出建筑物的高,从而自动完成该栋建筑物三维模型的构建。相比较于传统的一种建立简单模式的方式:利用传统GIS 中的二维线划数据及其相应的高度属性进行三维建模,高度信息利用立体测图获得或者通过楼层数粗略判断获得[21, 22],利用OESM进行简单建筑物模型的构建更类似此方法的升级版,因为使用OESM进行测图可获得传统方法中提起的GIS的线划图数据,同时也获得了高程数据。
同样利用河南南阳的数据,图 5给出了利用OESM在DOM上对建筑物进行 “单片”量测和建筑物重建的结果。
4 验证试验
4.1 试验1:OESM的模型精度评估
为验证OESM模型的内部精度,利用OESM在DOM上对建筑物进行屋顶角点的“单片”量测,获取其对应的三维坐标PDSM(XDSM,YDSM,ZDSM);再利用共线方程(见公式(3)、(4))将该角点反投回原始像面(包括立体像对的左片和右片,图 5)。原始影像上真实量测的角点和由OESM投影角点的偏差可验证OESM模型的有效性及精度。试验测区为河南南阳某城区,详细数据信息同2.2节。

|
| 图 5 利用OESM在DOM上进行三维建筑物建模和简单三维数字城市建立的结果 Fig. 5 The procedure for producing a 3D building model and simple 3D digital city |
由图 6可见,通过目视量测,由OESM计算的屋顶角点反投回原始影像,与原始影像上角点的偏差约为3.5像素,对应平面0.21 m。该结果说明:
(1) OESM模型具有高内部精度,可很好地拟合DSM、DEM的原始精度。
(2) 相比不使用OESM直接在DOM上测图(图 1),使用OESM模型对建筑物进行平面量测,精度大大提高。
4.2 试验2:OESM的模型的三维测图精度
为了验证本文提出的OESM用于建筑物量测和重建的三维测图精度,本试验采用28个OESM单片量测的角点数据;同时以传统摄影测量的立体测图的方法同样获取该28个角点的平面直角坐标和高程。将通过OESM解算出来的角点三维坐标与其立体量测获得三维坐标进行比较,精度评定结果表 1所示。

|
| 图 6 OESM模型的精度验证 Fig. 6 Validation of the OESM modeling errors |
| 序号 | OESM 测图结果 Result | 立体测图结果 | ||||
| Xeast | Ynorth | Zheight | Xeast | Ynorth | Zheight | |
| 1 | 382 801.367 | 4 319 606.263 | 21.479 | 382 801.358 | 4 319 605.878 | 21.200 |
| 2 | 382 825.531 | 4 319 603.296 | 21.784 | 382 825.438 | 4 319 602.876 | 21.286 |
| 3 | 382 827.142 | 4 319 616.172 | 21.549 | 382 827.089 | 4 319 615.790 | 21.591 |
| 4 | 382 802.993 | 4 319 619.005 | 21.461 | 382 802.915 | 4 319 618.675 | 21.468 |
| 5 | 382 744.465 | 4 319 773.939 | 13.193 | 382 744.298 | 4 319 774.011 | 12.514 |
| 6 | 382 758.029 | 4 319 772.766 | 13.313 | 382 757.877 | 4 319 772.831 | 12.469 |
| 7 | 382 758.653 | 4 319 780.137 | 13.113 | 382 758.471 | 4 319 780.211 | 12.614 |
| 8 | 382 745.084 | 4 319 781.274 | 13.385 | 382 744.879 | 4 319 781.198 | 12.463 |
| 9 | 382 748.365 | 4 319 842.840 | 25.358 | 382 748.156 | 4 319 842.994 | 25.200 |
| 10 | 382 747.015 | 4 319 830.998 | 25.577 | 382 746.830 | 4 319831.091 | 25.125 |
| 11 | 382 753.820 | 4 319 830.270 | 25.358 | 382 753.642 | 4 319 830.416 | 25.100 |
| 12 | 382 753.955 | 4 319 830.939 | 26.062 | 382 753.734 | 4 319 831.566 | 25.119 |
| 13 | 382 757.381 | 4 319 831.376 | 25.744 | 382 756.998 | 4 319 831.566 | 25.343 |
| 14 | 382 757.160 | 4 319 829.632 | 24.861 | 382 756.998 | 4 319 829.649 | 25.100 |
| 15 | 382 771.138 | 4 319 827.943 | 25.244 | 382 771.019 | 4 319 828.091 | 25.543 |
| 16 | 382 771.334 | 4 319 829.792 | 25.609 | 382 771.133 | 4 319 830.088 | 25.434 |
| 17 | 382 774.708 | 4 319 829.390 | 25.370 | 382 774.534 | 4 319 829.562 | 25.154 |
| 18 | 382 774.539 | 4 319 827.882 | 25.364 | 382 774.431 | 4 319 828.035 | 25.200 |
| 19 | 382 781.308 | 4 319 827.116 | 25.252 | 382 781.157 | 4 319 827.252 | 25.100 |
| 20 | 382 782.656 | 4 319 838.881 | 25.623 | 382782.595 | 4 319 839.044 | 25.100 |
| 21 | 382 774.323 | 4 319 839.869 | 25.169 | 382 774.159 | 4 319 839.907 | 25.100 |
| 22 | 382 774.438 | 4 319 840.761 | 25.500 | 382 774.255 | 4 319 840.962 | 25.200 |
| 23 | 382 756.819 | 4 319 842.776 | 25.525 | 382 756.595 | 4 319 842.994 | 25.200 |
| 24 | 382 756.715 | 4 319 841.905 | 25.295 | 382 756.499 | 4 319 842.035 | 25.200 |
| 25 | 382 848.590 | 4 319 605.081 | 18.434 | 382 848.496 | 4 319 604.777 | 18.170 |
| 26 | 382 850.002 | 4 319 618.481 | 18.381 | 382 849.859 | 4 319 618.326 | 18.200 |
| 27 | 382 830.354 | 4 319 620.546 | 18.208 | 382 830.279 | 4 319 620.275 | 18.180 |
| 28 | 382 828.866 | 4 319 607.180 | 18.540 | 382 828.907 | 4 319 606.958 | 18.220 |
通过统计计算,28个角点的中误差在Xeast方向为0.16 m,在Ynorth方向为0.24 m,即获得平面精度0.29 m,在高程方向获得0.41 m精度。

|
| 图 7 OESM测图与立体测图结果精度比较 Fig. 7 Comparison of mapping results from OESM and stereo plotting |
试验结果表明:
(1) OESM模型可获得与传统摄影测量中立体测图接近的精度,OESM单片量测可有效替代繁复的立体测图,测图精度可靠。
(2) OESM方式相对立体测图获得的相对高程误差略大,但考虑到本试验中OESM的高程来自于LiDAR点云,相对于立体测图得到的高程,没有作业员测图引入的随机误差,可靠性更好。
5 OESM模型效率和精度讨论
采用OESM模型进行单片测图,其效率和精度决定了这种方法的实用性。以下讨论影响OESM模型的效率和精度的因素:
(1) 效率: OESM模型比真正射影像的生产流程更简单,效率更高。表 2 对OESM和真正射影像在生产上的关键技术流程进行了对比。真正射影像制作过程中包括许多技术环节,如遮蔽区域的检测、纹理修补、阴影区域的检测与补偿、纹理仿真修复等等[15, 20]。其中,遮蔽区域的检测和纹理修补是真正射影像制作中最为关键的技术。OESM的生产流程中,多余点的去除步骤,也是一个遮挡的去除过程;所用的方法与生产真正射影像时所用的经典Z-Buffer 思想是一致的。同时,OESM模型的生产没有制作正射影像的一些重要步骤,例如纹理修补、阴影区域的检测与补偿、纹理仿真修复等步骤,因此理论上制作OESM的效率会比生产真正射影像更高一些。
| 序号 | 涉及的关键流程 | 真正射影像生成 | OESM模型生成 |
| 1 | 遮蔽区域的检测与补偿 | √ | √ |
| 2 | 阴影区域的检测与补偿 | √ | |
| 3 | 纹理修补 | √ | |
| 4 | 纹理仿真修复 | √ |
(2)精度:OESM模型的精度依赖于数据源,包括点云的位置精度和点云的密度。点云的位置精度决定了生成的DSM的几何精度,从而影响了OESM模型的精度。而真正射影像的精度也依赖于DSM的精度,当数据源一致时,OESM模型理论上可以达到与真正射影像一致的几何精度。此外,由于OESM模型的分辨率与其对应的正射影像(DOM)分辨率一致,因而要求使用的点云数据密度应与DOM的分辨率相匹配。例如,对于分辨率为0.5 m的DOM,那么点云密度应优于4 pts·m-2。
6 结论
本文通过生产一种影像与高程同步模型OESM,帮助实现在普通的DOM影像上进行“单片”量测,并获取对应目标的真实三维坐标。OESM模型建立了二维DOM与真实三维场景之间的联系,为解决传统DOM大比例尺城市测图的难题提供了一种新的思路。
文中的试验验证了OESM测图精度可获得与立体测图一致的精度,测图精度可靠;同时,在DOM上“单片”的量测方式相比传统立体测图方式,也可避免人工立体测点的繁复,加快测图的速度。
| [1] | ALSHAWABKEH Y, HAALA N,FRITSCH D. A New True Ortho-photo Methodology for Complex Archaeological Application[J]. Archaeometry, 2009, 52(3): 517-530. |
| [2] | AMHAR F, JANSA J,RIES C. The Generation of True Orthoimages Using a 3D Building Model in Conjunction with a Conventional DTM[J]. International Archive Photogrammetry and Remote Sensing, 1998, 32 (4): 16-22. |
| [3] | HABIB A, KIM E,KIM C. New methodologies for True Ortho-photo Generation[J]. Photogrammetric Engineering and Remote Sensing, 2007, 73(1): 25-36. |
| [4] | KARRASE G,GRAMMATIKOPOULOS L, KALIPERAKIS L, et al. Generation of Orthoimages and Perspective Views with Automatic Visibility Checking and Texture Blending[J].Photogrammetric Engineering and Remote Sensing, 2007, 73(4):403-411. |
| [5] | RAU J, CHEN N, CHEN L. Hidden Compensation and Shadow Enhancement for True Orthophoto Generation[C]// Proceedings of Asian Conference on Remote Sensing.Taipei:[s.n.]:2000. |
| [6] | RAU J, CHEN N, CHEN L.True Orthophotogeneration of Built-up Areas Using Multi-view Images[J]. Photogrammetric Engineering and Remote Sensing, 2002, 68(6): 581-588. |
| [7] | NIELSEN M. True Orthophoto Generation, Informatics and Mathematical Modeling[D]. Copenhagen: Technical University of Denmark, 2004. |
| [8] | SHI Zhaoliang, SHEN Quanfei, CAO Min. Processing and Accuracy Analysis of True Ortho in Pixel Factory[J]. Journal of Zhengzhou Institute of Surveying and Mapping, 2007, 24(5): 332-335. (史照良, 沈泉飞, 曹敏. 像素工厂中真正射影像的生产及其精度分析[J]. 测绘科学技术学报, 2007, 24(5):332-335.) |
| [9] | SUN Jie, MA Hongchao, ZHONG Liang. LiDAR Point Clouds Based Occlusion Detection of True-ortho Image[J]. Geomatics and Information Science of Wuhan University, 2011, 36 (8): 948-951. (孙杰, 马洪超, 钟良. 利用LiDAR点云的真正射影像遮蔽检测[J]. 武汉大学学报:信息科学版, 2011, 36(8):948-951.) |
| [10] | WANG Xiao, JIANG Wanshou, XIE Junfeng. A New Method for True Orthophoto Generation[J].Geomatics and Information Science of Wuhan University,2009,34(10):1250-1254.(王潇,江万寿,谢俊峰. 一种新的真正射影像生成算法[J].武汉大学学报:信息科学版, 2009,34(10):1250-1254) |
| [11] | XIE Wenhan, ZHOU Guoqing. Occlusion and Shadow Detection of Large-scale True Orthophoto in Urban Area[J]. Acta Geodaerica et Cartographica Sinica, 2010, 39(1): 52-58. (谢文寒,周国清.城市大比例尺真正射影像阴影与遮挡问题的研究[J]. 测绘学报, 2010, 39(1):52-58.) |
| [12] | ZHONG Cheng, HUANG Xianfeng, LI Deren, et al. Polygon Based Inversion Imaging for Occlusion Detection in True Orthophoto Generation[J]. Acta Geodaerica et Cartographica Sinica, 2010, 39(1): 59-64. (钟成,黄先锋,李德仁, 等. 真正射影像生成的多边形性反演成像遮蔽检测方法[J].测绘学报, 2010, 39(1):59-64.) |
| [13] | ZHONG Cheng, LI Hui, HUANG Xianfeng. A Fast and Effective Approach to Generate True Orthophoto in Built-up Area[J]. Sensor Review, 2011, 31(4): 341- 348. |
| [14] | ZHONG Cheng. A Study on Lidar Data Aided High-quality True Orthoimage Generation[D]. Wuhan:Wuhan University,2009. (钟成.机载激光雷达数据辅助高质量真正射影像制作[D]. 武汉:武汉大学, 2009.) |
| [15] | ZHOU G, CHEN W, KELMELIS J, et al. A Comprehensive Study on Urban True Orthorectification[J]. IEEE Transactions on Geoscience and Remote sensing, 2005, 43(9): 2138-2147. |
| [16] | GUAN Hongliang, JIANG Hengbiao, CAO Tianjing,et al. Construct 3D Models of Scene on True Orthoimage[J]. ActaGeodaerica et CartographicaSinica, 2010,39 (1):52-58.(关鸿亮,江恒彪,曹天景,等. 通过真正射影像快速构建三维建筑物场景的方法[J].测绘学报, 2010, 39 (1):52-58.) |
| [17] | XU Biao. Research on Key Technology of True Orthophoto Generation Based on Aerial Images[D].Wuhan: Wuhan University, 2012. (许彪. 基于航空影像的真正射影像制作关键技术研究[D]. 武汉. 武汉大学,2012.) |
| [18] | LIU Fengde, QIU Huo. 3D Mapping Method Based on the Left and Right Orthoimages[J]. Science of Surveying and Mapping, 2004, 29(7): 47-49. (刘凤德,邱豁. 基于左右正射影像的三维量测方法的研究[J]. 测绘科学, 2004, 29(7): 47-49.) |
| [19] | YOU Hongjian. LiDAR 3D Remote Sensing Data Process and Building Reconstruction[M]. Beijing:Surveying and Mapping Press,2006.(尤红建. 激光三维遥感数据处理及建筑物重建[M].北京:测绘出版社, 2006.) |
| [20] | JIN Weixian, ZHANG Pengtao. Photogrammetry[M]. Wuhan: Wuhan University Press, 1996. (金为铣,张鹏涛. 摄影测量学[M]. 武汉: 武汉大学出版社, 1996.) |
| [21] | MENG Yin, LIN Zongjian, LI Chengming. A Study of Refined Three-Dimensional City Modeling[J]. Bulletin of Surveying and Mapping, 2004(12): 17-21. (蒙印,林宗坚,李成名. 精细三维城市建模初探[J]. 测绘与空间地理信息,2013,36(3):73-74.) |
| [22] | FENG Yong. Study on the Modeling Technology and Application of 3D Digital City[J]. Geomatics and Spatial Information Technology,2013, 36(3):73-74.(丰勇.三维数字城市建模技术及应用探讨[J].测绘与空间地理信息,2013,36(3):73-74.) |