


在室外环境中,全球卫星导航系统(global navigation satellite system,GNSS)能够提供分米级甚至厘米级精度的定位;但在室内环境中,GNSS及相关技术无法提供高精度的定位服务[1]。针对室内高精度定位的需求,国内外研究机构主要利用视觉、蓝牙天线阵列、超宽带、音频、光源[1-2]等方法实现定位。其中,随着基础照明设施的普及,光源定位技术在室内迅速发展[3]。
目前,光源定位技术主要包括基于LED灯信号特征提取的定位技术[4]、基于光强模型的定位技术[5]、基于红外光视觉捕捉的定位技术[6]、基于特殊光源的定位技术[7]等。光源编码定位是一种基于特殊光源的定位技术:光源基站进行编码设计,使地面不同位置具有不同的光信号;接收端对光信号进行解码后,准确计算自身位置,其定位精度可以达到分米级甚至厘米级[2-3]。但单独利用光源编码定位可能会遇到以下问题:①在非视距(non line of sight,NLOS)环境中,接收端被障碍物或行人部分遮挡,接收到的光强降低,噪声增大,影响位置精度;②接收端将反射光信号误判为直射光信号,造成定位粗差;③接收端因某些原因,若被完全遮挡,导致定位失败。这些问题影响了光源编码定位在室内场景中的发展。
近年来,微机电系统(micro-electro-mechanical system,MEMS)快速发展,智能手机都带有MEMS传感器[8]。基于智能手机的行人航迹推算(pedestrian dead reckoning,PDR)技术利用MEMS惯性测量单元(inertial measurement unit,IMU),独立、连续地推算行人位置,短期精度高。但MEMS传感器误差较大,且导航算法中存在积分运算,故PDR的位置误差会随时间迅速累积[9]。
针对上述问题,本文基于智能手机平台,运用扩展卡尔曼滤波(extended Kalman filter,EKF)将光源编码位置与PDR位置相融合。光源编码+PDR组合既能利用光源编码定位结果实时修正IMU误差参数,控制PDR结果的发散;又能在光源编码定位无效时,利用PDR的短期结果提供较高精度的导航信息,从而保证定位结果的连续性和准确性。
光源编码+PDR组合算法的完整框图如图 1所示。

|
| 图 1 光源编码+PDR组合算法 |
光源编码定位系统由光源基站、接收端与相应软件组成。系统的编码体现在外壳的编码设计:将半球形外壳沿经纬度方向均匀划分成多块,每一块分别进行开孔、闭孔的设计。开孔表示编码位1,即某部分外壳被去除,可使光线通过;闭孔表示编码位0,即某部分外壳未被去除,阻止光线通过。外壳沿纬度方向进行不同的开孔、闭孔顺序设计。
图 2为光源编码定位原理示意图。光源基站悬挂在天花板上,工作时内部电机带动编码外壳旋转,LED光源通过开孔形成光束,使地面产生明暗变化。接收端记录光强的时间序列测量值,根据光源基站坐标、外壳编码参数和光信号解码信息,判断自身的粗略位置;之后通过小波变化降噪、优化的编码策略等,精确测量自身位置,达到厘米级的定位精度。具体的光源编码基站设计和定位算法参考文献[3]。

|
| 图 2 光源编码定位原理 |
基于捷联惯导的PDR算法框架如图 1所示。利用IMU数据进行惯性导航系统(inertial navigation system,INS)机械编排,得到用户实时的导航信息(三维位置、速度和姿态)。为了减缓捷联惯导的误差累计速度,算法实时检测行人运动状态:当检测到行人向前迈出一个脚步时,利用行进的距离构造速度观测值进行EKF速度更新[9]。
2.1 INS机械编排已知物体上一时刻的导航信息,利用INS机械编排,对IMU数据进行积分,可以得到当前时刻的导航信息。由于智能手机IMU的传感器误差较大,积分后位置误差会迅速增大,因此:①进行机械编排时可以忽略影响极小的误差项(如地球自转引入的误差)而不影响算法精度[9];②需要引入其他观测量,利用EKF进行数据融合以提高精度。
导航坐标系(n系)下INS机械编排方程的离散化形式[10]如下
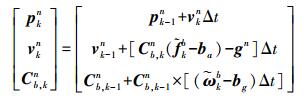 (1)
(1) 式中,pn、vn为n系的三维位置、速度矢量;Cbn为由载体坐标系(b系)转换到n系的变换矩阵;

EKF状态方程、量测方程的离散化形式见式(2),状态向量δxk、状态转移矩阵Φk/k-1见式(3)、式(4)[11]。
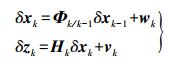 (2)
(2)  (3)
(3) 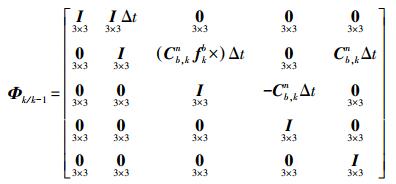 (4)
(4) 式中,δpn、δvn、ϕ分别为位置、速度、姿态的误差。
根据EKF状态方程和量测方程,利用式(5)进行状态更新和量测更新,得到行人的导航信息[1]。
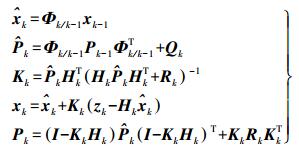 (5)
(5) 本文针对行人运动特征,进行如下合理假设:多数时候行人面朝的方向就是行走的方向[12];短时间内行人的速度是一个常值[13]。即在一步周期内,只存在恒定的前向速度,侧向和垂向的速度几乎为0。基于该假设计算行走速度,行人坐标系(l系)下的速度观测值[13]如下
 (6)
(6) 式中,vl为l系下的速度真值;nvl为观测噪声;SL为步长;Δt为走一步的时间。
n系下速度真值vn与vl存在以下关系
 (7)
(7) 式中,Cbl为手机坐标系b系到l系的转换矩阵。当手机端平且手机朝向与行走方向一致时,b系与l系完全重合,Cbl=I3×3。
对式(7)进行误差扰动,扰动项为式(8)。将式(8)代入式(7),省略二阶小项,可得l系下速度预测值
 (8)
(8)  (9)
(9) 利用EKF融合行走速度,将l系速度预测值与速度观测值之差作为量测信息,量测方程如下
 (10)
(10) 光源编码定位系统可以提供二维位置信息,将PDR位置与光源编码位置的差值作为量测信息,得到量测方程如式(11)—式(13)。
 (11)
(11)  (12)
(12)  (13)
(13) 式中,δzk, P-l为位置结果差值;Hk, P-l为量测矩阵;xPDRn、yPDRn、xlightn、ylightn为n系下PDR位置与光源编码位置的北向、东向坐标;vk为光源编码位置噪声,Rk为其协方差阵,vk~Ν(0, Rk)。
3.2 抗差处理在实际应用中,光源编码定位偶尔会出现远超限定误差的情况。光源编码+PDR组合算法利用PDR推算结果短期精度高的特点,使用PDR位置预测结果探测光源编码定位结果中的粗差,进行剔除或降权处理以起到抗差的目的[14]。
本文采用新息滤波的方式进行抗差处理。EKF的新息δrk及其方差阵Ck见式(14)、式(15),δrk~Ν(0, Ck)[15]。
 (14)
(14)  (15)
(15) 将新息与其方差进行比较,重新构建量测噪声协方差阵
 (16)
(16) 由于新息符合零均值的正态分布,因此当新息绝对值小于


为了验证光源编码+PDR组合算法的有效性,本文进行了4组试验。测试手机为华为P10 Plus,该手机IMU芯片型号为InvenSense公司的ICM-20690。光源编码定位系统由中国科学院深圳先进技术研究院提供[3]。设置光源编码定位频率为1Hz,即每1s从光源编码定位系统获取一次位置与标志位(1表示位置数据有效,0表示无效);设置IMU采样率为50Hz。本文利用光源编码+PDR组合反向平滑[10]的位置结果作为轨迹的参考真值。
试验场地为武汉大学诗琳通地球空间信息技术协同创新中心,光源编码基站布置在场地侧上方,可以完整覆盖试验场地,图 3为基站实物图。试验路径为5.4m×5.4m的矩形,基站、参考轨迹与行走方向如图 4所示,(0, 0)为试验起点。4组试验分别沿预定轨迹行走5圈、3圈、3圈、3圈,测试人员端平手机向前行走。试验轨迹包含了正对、侧对、背对光源基站的轨迹,可以有效考察LOS与NLOS环境中光源编码+PDR组合算法的有效性。

|
| 图 3 光源编码基站 |

|
| 图 4 光源编码基站与参考轨迹 |
4组试验光源编码定位结果的标志位如图 5所示。每组试验都存在标志位为0的数据,即在试验过程中,由于行人本身的遮挡或其他原因,光源编码定位系统会出现定位失败的情况,特别是第3组试验,有超过20个点定位失败。

|
| 图 5 光源编码定位结果标志位 |
图 6给出了标志位为1的光源编码定位结果。第2、3、4组试验在背对光源基站的区域,都出现了定位误差大于2m的粗差点。但对于正常定位点,光源编码定位的精度在1dm以内,与参考轨迹基本完全符合。

|
| 图 6 标志位为1的光源编码定位结果 |
表 1统计了4组试验的光源编码定位结果。3组试验的正常定位点占80%以上,但存在少数定位误差大的点;第3组试验有超过1/3的点标志位为0,正常定位结果仅占60%。
| 试验 | 标志位为0 | 定位误差大 | 正常定位点 | |||
| 个数 | 比例/(%) | 个数 | 比例/(%) | 个数 | 比例/(%) | |
| 1 | 9 | 8.5 | 0 | 0 | 97 | 91.5 |
| 2 | 3 | 5.4 | 2 | 3.6 | 51 | 91.0 |
| 3 | 23 | 36.5 | 1 | 1.6 | 39 | 61.9 |
| 4 | 9 | 14.7 | 2 | 3.3 | 50 | 82.0 |
经过以上分析,在实际应用中,单独依靠光源编码定位系统进行室内行人定位,将无法获得稳定可靠的定位结果。
4.3 光源编码+PDR组合定位结果分析图 7为光源编码+PDR组合的定位结果,组合结果与参考轨迹基本完全符合,可以反映出行人真实的导航信息。在光源编码定位结果良好时,光源编码+PDR组合的定位精度与光源编码定位精度相近,且定位结果连续稳定;当光源编码定位出现粗差点时,如第2、3、4组试验,光源编码+PDR组合的定位结果仍然良好,未出现异常结果;当光源编码正常定位点明显减少、定位结果不连续性时,如图 6中参考轨迹西南角的光源编码定位点比较稀疏,光源编码+PDR组合可以提供连续的导航信息,保证系统的可靠性。

|
| 图 7 光源编码+PDR组合定位位置结果 |
表 2给出了光源编码+PDR组合定位的误差统计。光源编码+PDR组合定位的水平误差均方根值在1dm以内,均值在8cm以内,最大值在3dm左右。EKF在没有外部信息辅助的情况下,解算结果必然是逐渐发散的;结合图 5(c),即便光源编码定位系统在5s内没有提供可用的位置结果,光源编码+PDR组合算法也仅仅产生了3dm左右的误差,这也进一步体现了本文算法的有效性。
| cm | |||||||||
| 试验 | 北向误差 | 东向误差 | 水平误差 | ||||||
| rms | mean | rms | mean | rms | mean | max | |||
| 1 | 7.5 | 5.7 | 6.0 | 4.4 | 9.6 | 8.0 | 31.9 | ||
| 2 | 7.3 | 5.2 | 5.7 | 4.3 | 9.3 | 7.6 | 30.6 | ||
| 3 | 5.8 | 4.1 | 7.8 | 5.3 | 9.7 | 7.5 | 34.0 | ||
| 4 | 6.9 | 5.1 | 6.1 | 4.3 | 9.2 | 7.4 | 26.3 | ||
经过以上分析,在理想情况下,光源编码+PDR组合和光源编码定位都能达到分米级乃至厘米级的定位精度,定位结果连续可靠,能反映行人真实的位置情况;当光源编码定位系统定位不连续或定位性能下降时,单独依靠光源编码定位不能很好地满足实际需要,但光源编码+PDR组合仍能保持1dm的定位精度,提供连续的导航信息。整体而言,光源编码+PDR组合更适合高精度的室内行人定位。
5 结语本文针对光源编码定位不连续、易受遮挡导致定位性能下降等问题,以基于捷联惯导的PDR算法为基础,实现了基于EKF的光源编码+PDR组合算法,并运用新息滤波进行抗差处理。试验结果表明,光源编码+PDR组合在室内环境中能实现高精度的连续定位,具有更高的稳定性和可靠性,适用于高精度室内行人定位。
| [1] |
刘韬, 徐爱功, 隋心. 超宽带与惯性导航组合的室内导航定位[J]. 测绘科学, 2016, 41(12): 162-166. |
| [2] |
陈锐志, 陈亮. 基于智能手机的室内定位技术的发展现状和挑战[J]. 测绘学报, 2017, 46(10): 1316-1326. DOI:10.11947/j.AGCS.2017.20170383 |
| [3] |
XIE B, TAN G, HE T. SpinLight: a high accuracy and robust light positioning system for indoor applications[C]//Proceedings of the 13th ACM Conference.[S.l.]: ACM, 2015.
|
| [4] |
ZHANG C, ZHANG X. LiTell: robust indoor localization using unmodified light fixtures[C]//Proceedings of International Conference on Mobile Computing & Networking.[S.l.]: ACM, 2016.
|
| [5] |
LI L, HU P, PENG C, et al. Epsilon: a visible light based positioning system[C]//Proceedings of Usenix Conference on Networked Systems Design & Implementation.[S.l.]: USENIX Association, 2014.
|
| [6] |
宋业磊.专注红外位置追踪, 青瞳视觉想要做中国版的Opti Track[EB/OL]. 2016-08-24[2018-12-20]. https://36kr.com/p/5051506.html.
|
| [7] |
MA S, LIU Q, SHEU C Y. Foglight:visible light-enabled indoor localization system for low-power iot devices[J]. IEEE Internet of Things Journal, 2018, 5(1): 175-185. DOI:10.1109/JIOT.2017.2776964 |
| [8] |
张鹏, 赵齐乐, 李由, 等. 基于PDR、WiFi指纹识别、磁场匹配组合的室内行人导航定位[J]. 测绘地理信息, 2016, 41(3): 29-32. |
| [9] |
KUANG J, NIU X, CHEN X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones[J]. Sensors, 2018, 18(5): 1391-1398. DOI:10.3390/s18051391 |
| [10] |
SHIN E H. Estimation techniques for low-cost inertial navigation[D]. Calgary: University of Calgary, 2005.
|
| [11] |
FOXLIN E. Pedestrian tracking with shoe-mounted inertial sensors[J]. IEEE Computer Graphics & Applications, 2005, 25(6): 38-46. |
| [12] |
GROVES P D. Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. London: Artech House, 2008: 335-337.
|
| [13] |
ZHUANG Y. Integration of WiFi and MEMS sensors for indoor navigation[D]. Calgary: University of Calgary, 2015.
|
| [14] |
常乐.基于DSP的GNSS/INS实时组合导航系统的研究[D].武汉: 武汉大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10486-1017065474.htm
|
| [15] |
苗岳旺, 周巍, 田亮, 等. 基于新息χ~2检测的扩展抗差卡尔曼滤波及其应用[J]. 武汉大学学报(信息科学版), 2016, 41(2): 269-273. |