



2. 北京市交通运行监测调度中心, 北京 100073
2. Beijing Municipal Transportation Coordination center, Beijing 100073, China
近年来旅游业发展迅速,各个城市的各类景区参观人数不断上升,其中一些著名景区更是经常出现人满为患的情况。随着智慧景区管理与服务的不断发展和探索[1],获取景区的客流数据,并结合物联网技术和智能分析技术能够有效地对景区客流量进行检测和预警,减少景区管理与服务的压力。根据近年来提出的大数据的特征[2],景区的客流量数据明显具有大数据的客观性、现势性、动态性等特点[3]。作为智慧景区中不可缺少的数据,如何方便、高效、精准地获取景区客流量数据就显得尤为重要。同时,如何根据大客流数据的特性,利用大客流数据实现景区客流的有效监测与分析也在不断的探索中。
目前除了传统的票务统计等比较落后的方法,常见的客流数据获取主要包括3种技术:一是基于视频检测技术的视频客流数据获取技术[4-6];二是基于红外线扫描技术的红外客流数据获取技术[7];三是基于激光扫描技术的激光客流数据获取技术[8-9]。其中,视频客流检测的技术属于普通传统客流数据获取技术,主要应用于商场等普通场合,该类场合主要为室内环境,不受天气影响,光线充足且稳定,但对于大部分景区来说都无法保证这种环境。红外客流检测技术主要应用在商店的窄出入口或公交车上车和下车口,检测精度较低,且探测范围比较小,也不能满足景区人流探测的需求。而激光客流检测技术利用现在成熟的激光探测技术,通过设备发射激光进行扫描,对扫描结果进行特征提取进而获取相应的客流信息。激光探测技术受外界影响小,尤其不受光照影响,即使在夜晚也能够正常探测,受雨雪、大风等天气影响也较小,同时能够高频率不间断地进行自动测量,对动态物体测量准确,测量过程自动化程度高无需人工干预,能够连续稳定作业,非常适用于景区的客流探测。
本文主要讨论如何通过高精度激光探测技术获取在指定时间段内通过的移动物体数量,结合特征识别技术判定其中个体模型的数量和个体模型的种类,最终实现实时获取通过的客流量数据;利用多台激光扫描仪构成分布式多模态传感器网络,形成完整的物联网,实现对整个景区监测区域的无缝覆盖及多层次数据采集,结合整个景区的客流情况,获取整个景区的客流量数据;同时,利用客流量数据的特性,借助相关软件系统,对数据进行统计分析,实现对景区的客流预警和预测,减少景区的管理与服务压力。本文将北京南锣鼓巷景区作为实际应用案例,通过在南锣鼓巷景区安装多台高精度激光探测设备,构建大客流监测物联网,获取整个景区客流数据,通过对大客流的统计分析,发掘南锣鼓巷客流规律,服务于景区管理。该研究对景区游客量监测和安全管理有实质性的帮助,有助于管理者有效地掌握景区实时客流情况,对景区客流变化和预测有一定的指示作用。
1 景区客流激光探测技术 1.1 激光探测原理和优点激光探测按照探测仪器的探测方式分为直接探测[10-11]和外差探测[12]。根据景区对游人数量进行探测的应用需求,本文使用直接探测方式更便于达到探测目的。使用二维激光扫描仪能够投放出一个垂直于地面的激光屏面,可利用激光反射对在激光屏面内发生遮挡的物体进行扫描测距。测距原理为飞行时间测距法(time of fly,TOF),即根据激光的飞行时间(发射、被物体反射、被接收的时间差)测量被测物体与传感器之间的距离值。利用激光束的直线飞行及弱扩散等性质,将激光束的发射角度和测得的距离值相结合,能够获取反射物体相对于光源的空间平面坐标信息。
利用这种激光探测的方法对景区游人进行扫描具有以下优势:
(1) 激光扫描仪在平面内进行扫描测距,如扫描范围设置为180°、每0.5°一个距离值时,一次扫描(一帧数据)就可以在扫描平面内获得对环境目标的361个坐标采样点,对于景区客流探测具有足够的精度。
(2) 激光扫描仪每秒可以获得大约50帧扫描数据(50Hz),约18050个坐标数据,对于游人的移动,能够做到准确动态捕捉,保证探测精度。
(3) 激光扫描仪的有效测距范围普遍能够达到18m以上,形成的激光屏面能够达到半径为18m甚至更大的半圆,保证了足够的探测区域。
(4) 激光扫描仪所发射的激光强度级别为1A(即Class 1),该强度的激光对人眼(人体最薄弱处)无害,波段为905nm,为不可见光,在对游人数量进行探测的过程中,不会对人体产生任何伤害。
1.2 客流数据激光探测方法设计对景区的客流探测,需要选择景区出入口或游人游览时通过的主要通道架设激光探测设备,获取该类地点通过的游客数量。该类地点地形环境相对简单,而且游人在该类地点行动模式相对单一,便于激光探测设备对游人扫描。如图 1所示,在游人通道口中央上方搭设探测设备,设备发射出的激光屏面尽量与通道或入口游人移动方向相垂直。考虑对探测结果进行特征提取时需要移动物体的轮廓外形,因此,探测设备的高度应在有效探测范围内尽量提高,减少因遮挡造成获取边缘轮廓不全的情况。

|
| 图 1 激光探测设备架设 |
架设好激光探测设备后,为方便将探测结果转成图形,以探测时生成的激光屏面为基础设定平面直角坐标系。如图 2所示,以架设设备激光光源垂直到地面的点为原点、原点到激光设备为Y轴、地面与激光屏相交垂线为X轴构建平面直角坐标系。由于在景区的实际探测中,通道或入口的实际形状和环境通常不一定是最理想的探测环境;同时,由于探测区域中会存在植被或地物干扰、地面形状不规则、通道边缘限制框形状不规则等情况,因此在实际探测之前,需要提取激光屏面与现场环境的相交边缘作为实际探测区域边界,减少因地物和地形带来的影响。在确保探测区域内无移动物体的情况下,打开探测设备,获取探测区域实际的环境形状和范围,如图 3、图 4所示。

|
| 图 2 激光扫描坐标系 |

|
| 图 3 激光扫描环境形状 |

|
| 图 4 激光扫描实际范围 |
如图 4所示,在确定完成探测区域边界后,图中黄线部分就是实际的激光探测区域。在设定好实际探测区域后,激光探头以20Hz以上的频率对探测区域进行不间断扫描。当有移动物体通过该区域时,会在探测区域内对激光产生遮挡,如图 5所示。根据激光测距原理,能够计算得出区域范围内遮挡物体的轮廓相对于光源的空间位置信息,结合设定的平面直角坐标系,可将获取的轮廓转换为具有坐标系的图形文件进行保存。当有移动物体通过该探测区域时,探测设备会将通过物体的轮廓扫描下来,并根据获取的坐标保存成图形文件,然后利用特征识别技术对这些图形进行特征识别,判定通过的物体是否为游人及游人数量,具体流程如图 6所示。

|
| 图 5 激光扫描通过物体 |

|
| 图 6 客流数据激光探测流程 |
对于景区客流数量的监测,必须对进入和离开景区的游客数量分别进行记录才能有效计算景区客流数据。很多景区的进入和离开通道往往都是同一条,因此需要对游客移动方向进行判别。本文对设备进行了改进,在一个设备上安装两个激光探头,如图 7所示。通过两个激光探头,在通道中放出两个平行的激光屏面进行检测,两个激光屏之间的距离控制在0.3m以内,当游人通过通道时,会依次通过两个激光平面,由于两个屏面距离小于0.3m,游人依次通过时扫描到的模型特征应具有很大程度的相似性,故只要比较两个激光屏面分别获取该特征的时间即可判定游人的移动方向。如图 8所示,假设游人通过a屏的时刻为t1,通过b屏的时刻为t2,设定由a屏到b屏的方向为进入景区方向,则当t1早于t2时,游人是进入景区,反之是离开景区,从而实现对整个景区游客的进出数量精准获取。

|
| 图 7 双激光探头设备 |

|
| 图 8 双激光屏面扫描 |
在激光探测过程中,激光设备通过光电转换,将扫描到的物体轮廓通过相对坐标值保存为数字图像。游人特征识别主要是对于图像形状轮廓的识别。
传统的游人特征识别[13]首先需要对目标进行提取,激光探测获取的图像是利用扫描获取探测物体轮廓边缘,然后计算相对坐标的数值生成对应图像。与传统的基于栅格类图像不同,省去了边缘提取和图像降噪等工序,只需去掉明显的噪声点,就可以利用轮廓特征比对的方法直接对探测物体进行判定。利用轮廓特征进行识别具有两点优势:一是基于轮廓特征的匹配计算量小,可以较好地满足实时性要求;二是要识别的目标物通常是预先知道的,其完整的几何信息可用于识别过程。
考虑在扫描过程中游人通常是移动行走的状态,双臂和双腿都会发生摆动,同时服装对于形体轮廓也存在影响,因此可选择人体的肩头特征[14-15]和高宽特征作为人体形状特征识别的依据。肩头区域即使在行进过程中,其相对空间关系也基本不变,不会产生影响整个区域结构的遮挡。因此,只需通过数学方法找到扫描图形轮廓形状对应的身高、身宽、头肩高、肩宽等数值并进行比对,判定是否符合人体结构的特点就可以确定扫描对象是否为游人。
2.2 游人模型数量的判定和分离在实地扫描过程中会出现两个或两个以上移动物体同时通过的情况,激光扫描设备会将这些物体扫描为一条连续的轮廓线,并将其保存为图像,或将飞鸟、落叶等无关的移动物体扫描得到轮廓图像。因此,在进行游人特征识别之前,需要利用游人数量判别模型对图像中游人模型数量进行判定和分离。激光探测设备扫描后生成如图 9所示的图像,该图像本身就是通过扫描坐标生成的,不存在颜色差别和边缘不清的情况,可以直接利用像素连续性对图像进行分组,图 9中有A、B、C 3组连续图像。

|
| 图 9 设立平面直角坐标的扫描图 |
根据扫描目标特点,表达游人身体轮廓的像素数与飞鸟、落叶等干扰对象的轮廓像素数具有明显的差别。参考要探测最小年龄游人的平均身形大小和最基本扫描部分,设定连续图像最小像素数M,各组连续图像像素数与M进行比对,直接排除明显的干扰项,减少需要识别的模型,如图 9中的A部分像素明显小于M,故可直接排除。
排除明显不是游人的连续像素形状后,以像素为单位根据扫描时设定的直角坐标系,对各组连续图像取自身在X轴方向的最小值X1和最大值X2,将图像定义为在[X1, X2]内的连续函数F(x),计算该函数在[X1, X2]内的极大值和极小值,如图 10所示。在正常情况下,游人通过激光探测屏面时其身体轮廓只存在一个最高点(头顶),即图形只有一个极大值点。但由于服饰或饰品等影响,扫描出的轮廓中有可能出现局部凸起,造成图像存在个别较小的极大值点,故利用图像处理技术对边缘轮廓折线进行设定阈值的平滑处理,去除这些不能代表识别特征的极值点。去除后计算每一个连续函数的极大值和极小值点的坐标,若该连续函数只存在一个极大值,则说明对应图形对象有可能表示一个游人,对图像进行下一步游人特征识别;若图像存在N个极大值点,表示有可能是N个游人轮廓扫描在一起,对图像按照两个极大值之间的极小值点坐标进行拆分,将拆分后的各个图像再进行游人特征识别,最终得到游人数量。图 10中,B图像在[XB1, XB2]中,存在两个极大值点B1和B3,一个极小值点B2,则B图像需要以B2点的X轴坐标上的垂直线进行分割,分为两部分,分别进行游人特征识别。C图像只存在一个极大值点C1,则C图像可直接进行游人特征识别。

|
| 图 10 基于坐标系计算极值的图形 |
经过游人数量模型判定和分离后,对进行游人特征识别的图像只需判别图像特征是否符合游人特征即可。如图 11所示,在原有坐标系下,记录图像最高点A,通过A在相对坐标系中Y轴的值AY获得对象身高,记为H。过A点作垂直于X轴的直线Z,取Z偏向坐标原点的那一侧图像作为判别图像,当Z与Y轴重合时,默认取X轴正区间图像。构建新的直角坐标系,直线Z为X轴,原坐标Y轴负方向为X轴正方向,作与Z垂直于A点的直线为Y轴,原坐标系中探头所在方向为Y轴正方向,A点为新的坐标系原点,如图 12所示。将图形视作平面坐标上的一个连续函数,利用数学方法依次从原点出发沿X轴正方向,找到第一个极大值点B,第1个极小值点C,第2个极大值点D,并获取相应坐标。根据人体轮廓特点,可得到头宽2BY,头肩高度DX,肩宽2DY。

|
| 图 11 激光探测原本图 |

|
| 图 12 转换后坐标 |
根据人体解剖学知识,已知头肩高度与头部宽度比值阈值为[2.5, 3.0],人体宽高比值范围为[0.28, 0.36],头肩高度和人体高度的比值范围为[0.22, 0.30][15]。则若扫描对象为游人,应满足以下关系
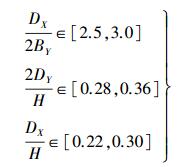
由于游人穿着和扫描时对人体有可能发生遮挡,因此,提取出的轮廓数值只要满足以上算式中任意两个,就可判定探测目标为游人,并记录相应数据[15]。
3 景区客流监测和分析 3.1 景区客流量数据的利用对景区客流监测和分析的客流量数据必须具有连续性、高精度和实时性等特性,而利用传统方法获取的客流数据往往存在精度不够高、获取速度慢等问题。因此,利用高精度激光探测和特征识别技术不仅保证了获取客流数据的精度等级,而且获取的客流量数据是标准的时空数据,具有明显的动态性和时势性,数据获取和传输速度快,几乎能够在获取的同时对数据进行分析。
对获取的客流数据可以通过其空间属性和时间属性进行分类计算,应用于客流监测和分析之中。其中,空间属性主要是指每一个监测设备布设的通道地理位置,每一个设备获取的客流数据代表本通道客流数值,根据通道地理位置,可以通过不同的通道选择形成不同的闭合监控区域,通过地理空间属性的筛选,就能够得到相应区域的实时客流数据。时间属性指获取客流数据的时间,首先根据和现实时间的时间差,可以分为监控数据和历史数据,方便不同的系统模块进行调用;同时根据不同的时间维度,可以通过时间属性将客流量数据按照小时、天、周、月等不同单位进行统计比较,对景区的客流数据进行分析。
3.2 南锣鼓巷景区的实践应用南锣鼓巷作为北京市有名的街巷型景点,胡同内空间狭小,大规模的人流不仅会给景区造成安全隐患,同时也会对景区古迹造成一定程度的破坏,因此在景区内安装激光探测设备,可防止人群密度过大对景区造成安全困扰。目前,北京南锣鼓巷景区已安装了19个激光人流探测设备,建立了完整的监测物联网,开发了专用系统对整个景区的客流量进行实时监控和数据统计分析。19个激光客流探测设备分别在16个通道口和1个通道中央布设,南锣鼓巷主通道南口和北口由于宽度较大,设立两台设备共同扫描以提升精度。设置在南锣鼓巷中央的设备将景区分割为两个区域,并设定从南往北通过为进入景区,反之为离开景区,方便对局部区域客流进行监控。每一个通道监控点都配置一台控制器,对扫描结果进行识别和记录,并每隔30s,将30s内从该通道离开景区和进入景区的人数生成一条数据传输到总服务器,保存在总数据库中,方便景区管理系统调用分析。
南锣鼓巷景区利用高精度激光人流探测设备,对所有出入口的客流进行实时监测,通过激光探测和特征识别技术,确保了游客的高识别率;同时进行连续不断全天候的监测,可以通过监测数据获取景区1d中最具代表性的游客进入和离开的客流数据,并以此为依据对景区客流流向进行推算与控制,防止突发事件发生。
3.2.1 景区客流实时监测功能通过在总服务器的系统读取和分析获取的客流数据,并结合系统界面,管理者能够查看南锣鼓巷各个通道最新的游人进出情况,并通过数据统计计算出当天已发生进入景区游客数量、离开数量、当前景区内存在客流数量等信息,如图 13所示。虽然设定的数据获取最小单位为30s,但根据管理者需要,将5min设定为客流监测单位,系统显示最新5min的客流数据。通过数据还可以随时计算景区内客流密度,基于密度对景区内客流拥堵程度进行评定。当达到预警级别的密度值后,系统会通过弹出框和报警声进行提醒,同时会生成信息记录,并启动应急疏散管理模块,提出建议的应急疏散方案。

|
| 图 13 南锣鼓巷大人流监测系统界面 |
景区的历史客流数据不仅是对游客数量变化的记录,还可以通过分析来探寻景区客流变化规律,帮助制定合理的管理方案。南锣鼓巷景区管理系统利用数据库特性,在各个设备时间单位为30s的人流数据基础上,对数据进行分组合并,创建以小时、天、周、月、年为统计单位的各个设备进入和离开人数总量表、景区内以小时为单位的客流人数变化统计表、景区各个区域人流总量表等,且通过系统前台界面,能够以表格、折线图、柱状图等多种可视化方法表达出来,直接生成管理者需要的表格、图表或文字报表,快速实现数据的同比环比等分析。如图 14所示,通过系统还能将查询的内容导出生成常用的Word格式或Excel格式文件,方便景区的管理者查询和分析景区的历史客流数据。

|
| 图 14 南锣鼓巷大客流系统历史数据统计分析界面 |
将激光探测技术和特征识别技术相结合的景区大客流监测方法,能够精准且高效地获取景区游客数量信息。激光探测受外界条件影响小,环境适应性强,能够高频率连续作业,对游客轮廓的动态捕捉准确,适用于各类景区的客流监测。获取游客轮廓图像后,结合数学方法和人体解剖学知识,对其进行特征提取,其计算速度快,判定精度高。得到的客流数据能够及时传输,数据字段规范,便于管理和保存,能够很好地与当前提出的智慧景区和景区大数据分析相结合。通过南锣鼓巷的实际应用发现,激光探测和特征识别相结合的客流获取方式能够有效地应用到智慧景区的管理和服务中,获取的景区客流量数据能够满足景区大数据管理的要求,进一步对数据的分析和利用能够更好地帮助景区进行应急处置工作。
虽然本文结合激光探测和特征识别技术在大客流监测方面作了一定的探索应用,取得了较好的应用效果,但特征提取方面的特征模型多样化较少,特征提取识别的精度还可进一步提升,另外获取的客流量数据在景区的客流监测和分析工作中还可进一步精细化。因此,下一步的研究重点将放在模型特征的创建和提取方面,通过设立多种类型的特征模型和识别算法,提高模型特征提取的精度,并对获取的客流数据进行更加高效精细的分析利用。
| [1] |
党安荣, 张丹明, 马琦伟, 等. 大数据时代的智慧景区管理与服务探讨[J]. 西部人居环境学刊, 2016, 31(4): 8-13. |
| [2] |
李德仁, 张良培, 夏桂松. 遥感大数据自动分析与数据挖掘[J]. 测绘学报, 2014, 43(12): 1211-1216. |
| [3] |
党安荣, 许剑, 张丹明. 遥感大数据促进智慧城市发展[J]. 建设科技, 2016(3): 15-18. DOI:10.3969/j.issn.1008-3197.2016.03.006 |
| [4] |
KUNO Y, WATANABE T, SHIMOSAKODA Y, et al. Automated detection of human for visual surveillance system[J]. International Conference on Pattern Recognition, 1996(3): 865. |
| [5] |
徐斌涛. 基于视频技术的轨道交通大客流监测方案[J]. 中国公共安全, 2017(2): 71-73. |
| [6] |
李想. 基于视频监控技术的客流计数系统[J]. 信息与电脑(理论版), 2012(5): 23-24. |
| [7] |
钱则人. 旅游客流监测系统技术解决方案[J]. 通讯世界, 2017(6): 13-14. DOI:10.3969/j.issn.1006-4222.2017.06.008 |
| [8] |
黄涛, 胡惠灵, 胡以华, 等. 空间目标识别中的激光探测技术[J]. 激光与红外, 2010, 40(7): 685-689. DOI:10.3969/j.issn.1001-5078.2010.07.001 |
| [9] |
张茂君. 基于激光探测技术的实时远程线路安全监控报警系统设计与应用[J]. 科技视界, 2014(3): 264-265. |
| [10] |
薛国刚, 孙东松, 杨昭. 直接探测激光雷达模型及其性能模拟[J]. 红外与激光工程, 2003, 32(3): 244-247. DOI:10.3969/j.issn.1007-2276.2003.03.006 |
| [11] |
张宇, 唐勐, 陈锺贤, 等. 直接探测激光雷达系统的建模与仿真[J]. 红外与激光工程, 2004, 33(6): 572-575. DOI:10.3969/j.issn.1007-2276.2004.06.004 |
| [12] |
何毅. 外差探测系统的相位匹配研究[J]. 中国激光, 1997, 24(10): 930-934. DOI:10.3321/j.issn:0258-7025.1997.10.016 |
| [13] |
NICOLAOU C A, EGBERT A L, LACHER R C, et al. Human shape recognition using the method of moments and artificial neural networks[J]. International Joint Conference on Neural Networks, 1999(5): 3147-3151. |
| [14] |
毛以芳, 沈小莉, 李英哲, 等. 基于头肩矩特征的人体识别研究[J]. 科技信息, 2009(16): 63-64. |
| [15] |
林佳, 阮晓钢, 于乃功. 基于头肩模型的人体识别方法[J]. 计算机测量与控制, 2016, 24(12): 205-208. |