


2. 精密工程与工业测量国家测绘地理信息局 重点实验室, 湖北 武汉 430079
2. Key Laboratory of Precise Engineering and Industry Surveying, National Administration of Surveying, Mapping and Geoinformation, Wuhan 430079, China
随着GPS系统现代化计划的实施、GLONASS系统的恢复与改造,以及Galileo系统和北斗二代卫星导航系统的建设,GNSS接收机向多星座系统融合的方向发展成为不可逆转的趋势。GNSS测量具有精度高、自动化、全天候、实时监测、无需通视等优点,已经广泛应用于精密工程测量和形变监测等领域。多系统多频率的组合具有以下优势[1]:①增加了观测数量和多余条件数,减少了解算时间,提高了解算结果的可靠性;②提高了定位服务的可靠性和科学性,即使其中一个导航系统出现故障或不能正常运行,其他的导航系统可以提供可用的数据服务,维持定位结果的稳定性;③由于解算收敛时间变短,提高了整体的工作效率。
虽然理论上GNSS多系统组合的观测模型已经建立,但由于不同GNSS系统之间存在信号、频率、时间同步及系统间偏差等不同方面的因素,多GNSS系统组合定位的实现还存在一些不足:①不同GNSS系统采用不同的系统时间定义,存在系统时差,从而多模GNSS接收机对于不同系统卫星的观测值存在相应的偏差;②GNSS多星座组合定位中不同星座下坐标与时间系统的统一存在问题;③GNSS多系统组合定位过程中系统的完好性监测存在一定的问题;④GNSS多系统集成的兼容性问题及用户成本问题。
其中,多系统多频率GNSS定位中使用的接收机造价昂贵是实际工程应用中不可忽视的问题。因为工程经费有限,因此难以实现大面积高密度布设。为了降低硬件成本,需要寻找一种既能满足精度要求,又能满足成本限制要求的定位方式。有研究只利用单频的GPS和BDS信号,借助RTK技术实现了较高精度的定位结果[2]。目前已有厂商将RTK定位引擎集成到GPS+BDS接收机模块中,大大降低了系统的设计难度和成本,并且能够达到厘米级的定位精度。
本文拟介绍基于RTK的低成本接收机的原理与设计思路,并采用自主设计的低成本接收机,设计短基线静态试验,用于对比传统RTK定位和网络RTK定位的性能。传统RTK定位采用自主设计的基站设备播发RTCM报文;网络RTK选择千寻位置网(简称为千寻)播发的RTCM信息。本文还模拟了工程测量中的低速运动场景,验证在短基线条件下,借助传统RTK定位方式,低成本接收机能否达到厘米级的实时定位精度。
1 基于RTK的GPS+BDS定位算法 1.1 传统RTK技术RTK是一种利用GPS载波相位观测值进行实时动态定位的技术。利用参考站和移动站之间观测误差的空间相关性,通过差分消除或削弱移动站观测数据中的大部分误差。其基本的双差观测方程为[3]
 (1)
(1) 式中,Δ∇为双差算子;λ为载波的波长;Δ∇φ为移动站和基准站之间的双差载波相位观测值;Δ∇N为相位的双差整周模糊度参数;Δ∇dorb、Δ∇dion、Δ∇dtrop分别为移动站和基准站之间求双差后仍未消除干净的残余轨道误差、残余电离层延迟和残余对流层延迟,这些误差均与移动站和基准站之间的距离有关;∑δi则为多路径误差、测量噪声等之和[1]。
利用RTK技术用户可以在很短的时间内获得厘米级精度的定位结果,并可对所获得的结果进行精度评定,减少由于成果不合格而导致的返工几率,是GPS定位技术的重大突破。但与此同时RTK也存在一些不足:随着移动站和基准站之间距离的增加,各种误差的空间相关性将迅速下降,导致观测时间增加,甚至无法固定整周模糊度而只能获得浮点解。因此,在常规的RTK测量中,需要对移动站和基准站之间的距离加以限制,以便使基准站和移动站之间能够保持较好的误差相关性,从而把残余误差Δ∇dorb、Δ∇dion、Δ∇dtrop控制在允许的范围内,保证定位精度[3]。
1.2 网络RTK技术针对传统RTK技术存在的问题,研究人员在20世纪90年代中期提出了网络RTK技术。网络RTK由参考站网、数据处理中心和数据通信线路组成。网络RTK技术依靠网络将基准站连接到计算中心,联合若干参考站数据解算或消除电离层、对流层等的影响,以提高RTK定位的可靠性和精度。主流的网络RTK技术采用了虚拟参考站技术(VRS)。
VRS技术是通过与流动站相邻的几个参考站之间的基线计算各项误差,采用一定的算法来消除或大幅削弱这些偏差项所造成的影响。VRS参考站向流动站发送正常格式的RTCM信息,流动站需通过通信链路将其点位信息发送给中央控制站。图 1为虚拟参考站原理,数据处理中心根据流动站发送的近似坐标判断出该站位于哪3个参考站(参考站A、参考站B和参考站C)所组成的三角形内。然后根据三角形差值方法建立一个对应于流动站的虚拟参考站P(VRS),将该虚拟参考站的改正信息传输给流动站U,流动站结合自身的观测值实时解算出移动站的精确点位。

|
| 图 1 虚拟参考站原理 |
如果只采用GPS系统或BDS系统,会受到可见卫星数量少或卫星拓扑较差等因素的影响,导致整周模糊度固定困难且固定解容易中断。而联合使用GPS系统和BDS系统的观测数据,可以有效改善卫星观测质量,大大缩短整周模糊度的初始化时间,显著提高定位体验。下文统一用GPS+BDS RTK来表示这种定位方法。GPS+BDS伪距和相位双差观测方程[4]如下
 (2)
(2) 式中,Δ∇为双差算子;Pi为伪距观测值,下标i表示频率;φi是以周为单位的载波相位观测值;λi为波长;ρ为站星间的几何距离;Ni为整周模糊度;dtrop和dion为对流层和电离层延迟误差(在短距离的RTK定位中可以很好地消除);n为观测噪声和多路径效应。
将两系统同一历元的观测方程联合求解[4],简化后的GPS+BDS载波相位相对定位的法方程的矩阵形式为
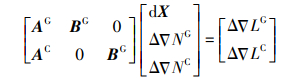 (3)
(3) 式中,dX为三维坐标改正;Δ∇N为双差整周模糊度;上标G表示GPS卫星;上标C表示BDS卫星;A、B的表达式如下
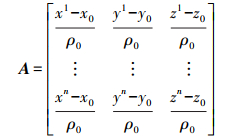 (4)
(4) 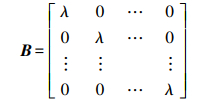 (5)
(5) 式(4)—式(5)中,(x0, y0, z0)为接收机坐标初值(一般采用单点定位方法获得);(xn, yn, zn)为卫星坐标;ρ0是接收机与卫星之间的几何距离初值;λ为载波波长。若单个历元两测站共视n颗GPS和BDS卫星,可列n-2个双差方程。但是,其中有n+1个未知数(3个坐标参数和n-2个模糊度参数),法方程的矩阵是秩亏的。根据伪距和载波相位的测量精度,按照1:10 000的权比联合解算伪距和载波相位双差观测方程,可以改善法方程存在的病态问题,提高模糊度的收敛速度[3]。
1.4 RTCM差分改正信息无论是常规RTK技术还是网络RTK技术,都需要借助于RTCM报文将用于辅助定位的测量值传递给待定位接收机。
由表 1所示,为了达到较高的传输完整率,RTCM V3.X版本电文一条标准的电文由8 bits的引导字、6 bits的保留字、10 bits的消息长度、一条可变长度消息及一个24 bits的周期冗余检校组成。
RTCM V3.X电文能够根据要求,传递多种测量值。在GPS+BDS定位中,主要采用1005、1074、1124等几种报文。由于本文篇幅有限,对试验中所涉及的RTCM格式数据作部分截取。图 2是从基准站播发的RTCM报文中截取的片段。

|
| 图 2 基准站RTCM数据 |
由图 2可知,基准站发出的RTCM数据中包含3种格式的数据(见表 2)。表 2中,3E D0对应消息编号为1005的数据,1005为包含测站坐标的数据;43 20对应消息编号为1074的数据,1074为包含GPS观测值的数据;46 40对应消息编号为1124的数据,1124为包含北斗观测值的数据。
同理,对千寻提供的RTCM报文进行了解析,截取的数据如图 3所示。

|
| 图 3 千寻RTCM数据 |
具体包含的消息类型见表 3。其中,43 CE对应消息编号为1084的数据,1084为包含GLONASS观测值的数据;消息编号为1124和1074数据的详细内容与上文相同。
由表 2和表 3可知,两者所使用的RTCM格式的信息并不完全相同,这是由于本试验主要处理GPS和BDS的单频数据,不需要播发基准站的GLONASS观测值,而作为基准站,必须输出测站坐标,因此在设置基准站发送RTCM数据格式时,舍弃了编号为1084的数据,而增加了编号为1005的数据。
1.5 硬件设计Ublox公司出品的NEO-M8P-2模块既能作为基准站播发RTCM报文,也能作为移动站利用基准站播发的RTCM报文,借助于内部的RTK定位引擎实现厘米级的定位精度。而武汉梦芯公司的MXT906模块,为移动站提供了一个更低成本的解决方案。本研究基于NEO-M8P-2模块设计了基准站,通过无线数传模块向移动站进行广播;基于MXT906模块设计了移动站接收机,不仅能够接收基准站播发的RTCM报文实现较高精度的定位,也能够通过千寻获取RTCM格式数据实现定位功能。
网络RTK理论上能够获得更好的定位结果,但对算法要求较高,而且受移动通信网的制约,某些场景中无法得到满意的解算结果,而且由于是商用服务,还涉及收费的问题。而自主设计基准站的方式,对移动通信网络没有要求,而且在工程测量领域,其施工范围较小,基准站和移动站的距离较近,定位过程中误差的相似性很高,更有利于借助差分方式来消除。因此在精密工程测量领域,利用低成本的GPS+BDS模块,采用自主架设基准站的方式,不失为一种可行的解决方案。
2 对比试验与分析本文设计并完成了两个试验:试验1基于自主架设基准站方法实现GPS+BDS RTK定位与基于千寻方法实现GPS+BDS RTK定位进行对比;试验2是在动态的情况下,对实际工程应用中的基于自主架设基准站方法实现GPS+BDS RTK定位的模拟。两次试验地点均在武汉大学信息学部,且自主架设基准站处于同一位置。
2.1 试验场景描述试验地点位于武汉大学测绘学院楼顶,图 4所示为架设在测绘学院楼顶西侧的基准站,图 5所示为同在测绘学院楼顶东侧的移动站,两者相距小于100 m。

|
| 图 4 基准站 |

|
| 图 5 移动站 |
试验流程如图 6所示。在基准站位置采用NEO-M8P-2模块播发RTCM格式数据。在移动站,天线接收原始观测数据,通过功率分配器同时传输给2台基于MXT906模块的接收机。2台接收机对应两种方法,具体过程如下:

|
| 图 6 试验流程 |
(1) 自主架设基准站方法的试验过程:在基准站位置,NEO-M8P-2模块播发消息编号为1005、1074和1124的差分数据,这些差分数据通过无线数传模块发送给移动站的基于MXT906模块的接收机,MXT906模块完成位置解算后通过WiFi将解算结果传输给笔记本电脑。
(2) 千寻方法的试验过程:笔记本电脑在有网络的情况下通过千寻获得消息编号为1074、1084和1124的数据,通过WiFi传输给基于MXT906模块的接收机,MXT906模块完成位置解算后同样通过WiFi将定位结果传回笔记本电脑。
2.3 试验分析本文试验数据均通过RTKLIB中的RTKPLOT进行可视化绘图,并对定位结果进行深入分析。
2.3.1 模糊度固定率整周模糊度解算是否正确直接影响RTK定位的精度,而模糊度固定的性能可以通过模糊度固定率来体现。模糊度固定率可以表示[5]为
 (6)
(6) 式中,NCF表示固定的历元个数;NT表示解算的整个历元总数[6]。
两种方法解算的位置偏差分别如图 7、图 8所示。图 7和图 8中,横轴代表UTC时间,纵轴代表E-W、N-S和U-D 3个方向上的位置偏差值,黑色点代表模糊度已固定。

|
| 图 7 自主架设基准站方法解的位置偏差 |

|
| 图 8 千寻方法解的位置偏差 |
由RTKPLOT内置功能模块可以直接得到模糊度固定率(见表 4)。
由表 4可知,基于自主架设基准站方法模糊度固定率为98.2%,而基于千寻方法模糊度固定率为97.6%。考虑测试环境周边有高楼的遮挡,说明两者都有较高的模糊度固定率。
2.3.2 精度评定在观测时段内,定位结果的位置偏差在一定意义上可以反映出定位结果的优劣。从图 7和图 8可知,100 m之内的基线范围,UTC时间04:03:42至06:00:00段,只有固定解的情况下,两种方法的标准差(STD)和均方根误差(RMS)见表 5。
| m | |||
| 参数 | 基准站 | 千寻 | |
| STD | North | 0.002 4 | 0.002 8 |
| East | 0.004 2 | 0.003 7 | |
| UP | 0.008 6 | 0.010 9 | |
| RMS | North | 0.015 0 | 0.008 6 |
| East | 0.007 0 | 0.003 7 | |
| UP | 0.009 8 | 0.018 4 | |
由表 5可知,基于自主架设基准站实现GPS+BDS RTK定位与基于千寻方式实现GPS+BDS RTK定位的STD和RMS均在1 cm左右。
3 动态模拟试验与分析试验1主要是在静态的情况下对两种方法的定位结果进行对比分析。本节试验2主要模拟实际工程应用中需要动态定位的情况,并对自主架设基准站的RTK结果进行分析。
3.1 试验场景描述试验2基准站的位置仍然选择武汉大学测绘学院楼顶西侧,移动站的位置在武汉大学信息学部友谊广场。基准站与移动站之间的距离约为试验1的2倍。
如图 9所示,将4个带有对中杆的天线绑在推车上,4个天线分别连接4台自制的基于MXT906模块的接收机,分别标号1、2、3和4。

|
| 图 9 推车 |
动态试验流程如图 10所示,基准站通过无线数传模块广播1005、1074和1124等RTCM报文。4台基于MXT906模块的接收机通过WiFi将定位结果发送到笔记本电脑。将推车围绕空中之舞雕像近似匀速推动6圈,模拟实际工程应用中需动态定位的情况。

|
| 图 10 动态试验流程 |
使用RTKLIB中的RTKPLOT对4台基于MXT906模块的接收机获得的解进行绘图,结果如图 11所示,比例尺为1:500。

|
| 图 11 4台接收机定位结果的平面轨迹 |
图 11为在UTC时间12:12:23至12:26:46段内4个基于MXT906模块的接收机所得定位结果的平面轨迹。此区间内,4台接收机的固定率均为100%,说明基于自主架设基准站实现低成本GPS+BDS RTK定位的方法不仅可以用于实际工程应用中静态观测的情况,还可以用于工程应用中慢速运动的情况。
4 结语本文主要研究了低成本GPS+BDS接收机的设计要素,并对比了采用传统RTK的自主架设基准站的方式和网络RTK定位方式的性能。试验证明,在静态短基线条件下,采用自主架设基准站的方式和采用网络RTK的方式均能达到1 cm左右的定位精度。而慢速的动态试验也证明了低成本GPS+BDS接收机能够达到厘米级的定位精度,可用于需要厘米级定位精度的动态定位的工程场景中。
另外,随着基准站和移动站之间基线长度的增加,采用自主架设基准站方式的定位结果会逐步变差,因此自主架设基准站的方式主要适用于较小范围的精密工程测量领域。
| [1] | 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2010. |
| [2] | BIAGI L, CÃTÃLIN F, NEGRETTI M. Low-cost GNSS Receivers for Local Monitoring:Experimental Simulation, and Analysis of Displacements[J]. Sensors, 2016, 16(12): 2140–2156. DOI:10.3390/s16122140 |
| [3] | 史先领, 张书毕. 网络RTK中几种常用技术的分析比较[J]. 海洋测绘, 2006, 26(5): 75–78. DOI:10.3969/j.issn.1671-3044.2006.05.023 |
| [4] | 王世进, 秘金钟, 李得海, 等. GPS/BDS的RTK定位算法研究[J]. 武汉大学学报(信息科学版), 2014, 39(5): 621–625. |
| [5] | 胡明贤. GPS/BDS/GLONASS多系统网络RTK算法实现及定位性能分析[D].武汉: 武汉大学, 2017. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2919239 |
| [6] | 黄继拯, 刘红, 赵艳, 等. GPS/北斗的组合选星算法研究[J]. 舰船电子工程, 2011, 31(8): 81–83. DOI:10.3969/j.issn.1627-9730.2011.08.022 |
| [7] | 高星伟, 过静珺, 程鹏飞, 等. 基于时空系统统一的北斗与GPS融合等位[J]. 测绘学报, 2012, 41(5): 744–748. |
| [8] | HEUNECKE O, GLABSCH J, SCHUHBACK S. Landslide Monitoring Using Low-cost GNSS Equipment-Experiences from Two Alpine Testing Sites[J]. Journal of Civil Engineering and Architecture, 2011, 5(8): 661–669. |
| [9] | 于晓东, 吕志伟, 王兵浩, 等. DGNSS数据传输格式RTCM3.2的介绍及解码研究[J]. 全球定位系统, 2015, 40(3): 37–41. |
| [10] | 高星伟.GPS/GLONASS网络RTK的算法研究与程序实现[D].武汉: 武汉大学, 2002. http://www.cqvip.com/qk/60408a/200302/1004210909.html |
| [11] | 吴北平, 李征航. GPS网络RTK线性组介法与内插法关系的讨论[J]. 测绘地理信息, 2003, 28(5): 27–28. |
| [12] | 满小三, 孙付平, 潘国富, 等. BDS/GPS组合RTK定位性能分析[J]. 测绘工程, 2016, 25(12): 16–21. |
| [13] | 袁宏超, 秘金钟, 徐彦田, 等. BDS+GPS双系统多频RTK算法研究[J]. 测绘通报, 2016(9): 5–8. |
| [14] | 严丽. BDS/GPS融合精密定位理论与算法研究[D].成都: 西南交通大学, 2017. |
| [15] | 王世进. BDS/GPS RTK算法研究及软件实现[D].阜新: 辽宁工程技术大学, 2014. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2919239 |
| [16] | (CERP-IOT). Internet of Things Strategic Research Road-map[R].[S.l.]: CERP-IOT, 2009. |
| [17] | MAREL H. Virtual GPS Reference Station in the Nether-lands[C]//Proceedings of the 11th International Technical Meeting. Nashville: ION, 1998. |
| [18] | EULER H J, ZEKZER M, TAKAC F, et al. Applicability of Standardizek Network RTK Mrddshr Got Surveying Rovers[C]//Proceedings of ION GPS/GNSS. Portland, Oregon: ION, 2003. |
| [19] | 陈振, 王权, 秘金钟, 等. 新一代国际标准RTCM V3.2及其应用[J]. 导航定位学报, 2012, 2(4): 87–93. |
| [20] | GUNTHER J, HEUNECKE O, PINK S, et al. Devel-opments Towards a Low-cost GNSS Based Sensor Network for the Monitoring of Landslides[C]//Proceedings of the 13th FIG International Symposium on Deformation Measure-ments and Analysis. Lisbon, Portugal: FIG, 2008. |