


随着无线通信技术的发展,无线定位技术引起了各国公司及研究人员的广泛关注。超宽带(ultra-wide band,UWB)由于其极大的带宽和超高的时间分辨率,能提供高达厘米级的定位精度,且具有更好的穿透能力,更适用于室内封闭环境下的高精度导航定位服务[1-2]。
UWB定位方法一般包括基于角度到达(angle of arrival,AOA)、基于接收信号强度(received signal strength,RSS)和基于到达时间(time/time difference of arrival,TOA/TDOA)。其中AOA方法需要天线阵列,额外增加硬件成本;RSS方法对信道环境极为敏感,鲁棒性不强[3];TOA方法需UWB基准站和流动站之间保持严格的时间同步,TDOA方法需UWB基准站之间保持严格的时间同步[2],在不增加硬件的条件下,很难通过算法进行精确的时间同步;基于往返时间(two-way time of arrival,TW-TOA)方法可以间接测量UWB基准站和流动站的距离,不需要UWB基准站和流动站保持严格的时间同步[4-5]。利用AOA/TW-TOA混合测距方式进行室内定位[6],算法简单,计算量小,但会在TW-TOA测距的方式上增加AOA量测的硬件成本。在上述定位方式中,通过TW-TOA方法测距进行定位,具有较高的定位精度和较好的实用性,因此基于TW-TOA测距的定位方法应用广泛。
在进行TW-TOA测距过程中,测距误差一方面来自标准时间偏差,主要包括脉冲信号在流动站和基站中本身的固定时间附加延时误差、仪器启动并且运行不同步产生的误差,以及环境中温度、湿度等条件引起的误差;另一方面误差产生在流动站进行定位估计的系统中,当流动站和基站之间电波传播的视距(line of sight,LOS)路径被遮挡时,电波只能以反射、折射等非视距传播(nonline of sight,NLOS)方式进行传播,由于电波的非视距传播,测量值中会产生一个附加超量延时,通常将该附加超量延时称为NLOS误差。
对于标准时间偏差,文献[7]在室外环境下分别从理论和试验角度对UWB的标准偏差进行了分析,发现UWB标准时间偏差可固定为一个固定误差和比例误差的组合,但未对室内环境下的标准时间偏差进行分析。在NLOS环境下,由于障碍物的遮挡,UWB定位精度会大幅降低。利用Kalman滤波对原始测距信息平滑处理进而减少NLOS误差的影响。如文献[5]提出了利用有色噪声自适应的卡尔曼滤波方法消除NLOS误差,仿真效果显著,但计算量较大;文献[8]采用偏移卡尔曼滤波(biased Kalman filter,BKF)处理测量数据,其中将NLOS误差视为服从指数分布,不符合其误差特点(NLOS误差的分布模型没有统一定论),且将测量噪声的均值加入到卡尔曼滤波计算中,这种做法需要大量试验数据且不具有代表性,不能适用于任何存在非视距环境。因此本文针对UWB TW-TOA测距的标准时间偏差和NLOS误差进行分析,并设计相应的削弱方法。
1 TW-TOA测距模型TW-TOA测距是通过UWB脉冲信号从UWB流动站到UWB基准站的往返时间确定两者之间的距离,其不需要UWB基准站与流动站间的时间同步[1, 5],可以消除TOA/TDOA测距中的时间同步误差。如图 1所示,UWB流动站向UWB基准站发送加入标识的脉冲信号,UWB基准站识别标识并接收到脉冲信号后再向UWB流动站发送响应脉冲,UWB流动站接收到响应脉冲信号,其模型为

|
| 图 1 TW-TOA测距方法 |
 (1)
(1) 式中,tround和ttrip为UWB流动站脉冲信号的发送时间和响应脉冲信号的到达时间;pr为UWB流动站在发送脉冲信号时刻的位置;pb为UWB基准站接收到脉冲信号时刻的位置;tD为UWB流动站和基准站之间的标准时间偏差;||·||2为Euclid范数;eNLOS为NLOS误差所造成的时间延迟;c为光速。
则UWB流动站与UWB基准站间的距离为
 (2)
(2) 式中,
标准时间偏差所造成的测距误差rD不仅包括脉冲信号在UWB流动站和UWB基准站中的固定时延误差、UWB器件误差和UWB逐次启动误差,还与脉冲信号传播的距离、温度等外界环境有关[9-10],模型可表示为
 (3)
(3) 式中,cn为固定时延误差、UWB器件误差、UWB逐次启动误差和外界环境所造成的常值误差项;φ(s)为不同UWB测距距离形成的误差,可以看作与距离s构成的多项式函数[9];en为系统噪声。
根据标准时间偏差误差模型可知,不同UWB器件的标准时间偏差可能不同,因此需要逐一对UWB设备进行标定,确定每个UWB基准站与流动站间的标准时间偏差误差项,获得更精确的TW-TOA测距信息。假定温度等大气环境恒定,在完全的LOS环境下,将UWB流动站与UWB基准站放置于多组固定距离上,将大量TW-TOA测距信息的平均值与真实测距信息的差值作为标准时间偏差误差rD,最后通过拟合可确定标准时间偏差的误差模型。
3 基于偏移卡尔曼滤波的NLOS误差鉴别与抑制方法无论是在室外的蜂窝网定位还是室内定位,在定位基站与移动站之间的直射路径往往可能受到阻挡,由于实际环境中的障碍物阻挡或多径干扰而造成的误差称为非视距误差,这时它们之间信号的传播是非视距传播,其路径轨迹如图 2所示。

|
| 图 2 NLOS路径轨迹 |
在NLOS误差影响情况下,TW-TOA测量值不能准确真实地反映实际距离、角度等其他信息,即使消除了标准时间偏差,也不能在本质上提高测距精度,因此需要采用一定方法对其进行鉴别与抑制。
3.1 NLOS误差的鉴别在UWB的室内环境下,NLOS误差并不能通过模型表示出来,可以通过计算测量测距残差值实时描述NLOS的数据变化情况。
基于偏移卡尔曼滤波器的状态方程和测量方程模型如下:
状态方程
 (4)
(4) 观测方程
 (5)
(5) 式中,Xk、Yk分别代表状态向量和观测向量;A表示状态转移矩阵;Γk, k-1为状态噪声系数矩阵;wk-1、vk分别为状态噪声序列与观测噪声序列;Hk为观测向量系数矩阵。根据文献[11]得到,其中状态向量Xk=
测距残差为
 (6)
(6) 如果存在NLOS误差,将测距残差加入到下一时刻的卡尔曼滤波计算,改正卡尔曼滤波的异常值,设测距残差值为Δd=|C|,故卡尔曼滤波公式中需要考虑非零残差值C的存在,其公式重新推导如下:
测量值向量Yk可以用下式估计
 (7)
(7) 测量值向量Yk和其估计值Yk/k-1之间的差为
 (8)
(8) 误差ek/k-1用来纠正

 (9)
(9) 基于偏移卡尔曼滤波迭代的具体过程为
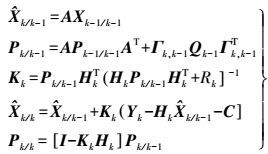 (10)
(10) 可以看出,经过推导得到的式(9) 多了非零数值C的作用,式(10) 就是在非视距环境下的一种新的偏移卡尔曼滤波器的表达式。
这种方法的阈值容易确定,且由于残差值C的作用,避免了将NLOS误差带入到卡尔曼滤波迭代过程中,通过计算测距残差实时描述NLOS误差的数据变化情况,符合NLOS误差具有随机性的特点,没有引入其他不必要的参数,使得滤波精度进一步提高。
4 试验及结果分析 4.1 UWB标准时间偏差标定为了确定每个UWB的标准时间偏差函数,在本次试验中,以Time Domain公司的PulsON400通信与测距模块为UWB硬件,以Leica TS06全站仪测距结果为真实值。试验地点为室内。试验场景为完全的LOS条件,即试验过程中UWB流动站和基准站间无障碍物遮挡,且试验中无人员穿行。其中UWB流动站保持不动,将UWB基准站放置于固定距离上,按距离3~30 m分为10组,每组间隔3 m,在每组距离上TW-TOA测距1000次,将平均TW-TOA测距信息作为当前距离上的TW-TOA测距值。每组距离的TW-TOA测距值与真实值的差作为TW-TOA测距误差,在本次试验中认为是标准时间偏差误差。
图 3中方框表示TWTOA测距值与真实值之差,粗线为4阶多项式拟合结果。如图 3所示,针对0~35 m的测距范围,对3个UWB基准站的10组标准时间偏差误差进行分析并用4阶多项式进行拟合,确定3个UWB基准站统一的标准时间偏差误差模型,用于TW-TOA测距中的UWB标准时间偏差改正。从图 3还可以发现,在LOS环境下,拟合残差均小于5 mm。

|
| 图 3 UWB标准时间偏差误差 |
在实际生活中,大多数情况都是既存在视距误差又存在非视距误差影响,本文试验环境即选定这种情况,利用4个UWB模块、全站仪和笔记本电脑(安装定位程序)进行动态定位试验。其中设定UWB模块采样时间间隔为T (T=0.5 s),路径上的各拐点及UWB参考基准站坐标已预先用全站仪测得。试验环境如图 4所示,室内定位路径轨迹平面图是一个矩形,移动站MS以速度为1 m/s沿着已知的四边形ABCD运动。当移动站的UWB没有被墙柱遮挡时,移动站只受到视距误差(标准时间偏差)影响;当移动站被墙柱遮挡时,会同时受到视距和非视距误差影响。试验结果如图 4-图 5所示。

|
| 图 4 试验环境 |

|
| 图 5 基站3测距误差 |
图 5中的灰色折线为原始观测数据测距误差。0~1500次是视距环境下的测距误差,该阶段移动站MS处于静止状态,并且与所有基站间相互通视,均是LOS路径。从图中可以看出,原始数据会有约为0.2 m的偏差,其误差来源主要为标准时间偏差,该类误差可通过已经得到的标准时间偏差模型改正;1500次以后为间断性非视线测距,可以看出NLOS误差严重影响UWB测距精度, 最大可达0.5 m,采用本文算法对NLOS误差进行处理,可以发现测距误差明显减小,可控制在0.2 m以内。
5 结语UWB TW-TOA测距不需要UWB基准站与流动站保持严格的时间同步,并且具有较高的测距精度,因此该测距方式应用广泛。为进一步提高TW-TOA测距精度,本文针对TW-TOA测距误差进行了分析。标准时间偏差和NLOS误差是UWB TW-TOA测距的主要误差源,本文采用4阶多项式拟合模型对UWB的标准时间偏差进行标定,利用基于偏移卡尔曼滤波的NLOS误差鉴别与抑制方法对NLOS误差进行削弱。利用实测试验对以上算法进行验证,结果表明经过标准时间偏差标定及NLOS误差的鉴别与抑制后,在LOS环境下,测距精度可达到毫米级;在NLOS环境下,测距精度可由原来的0.5 m缩小至0.2 m,证明了本文方法的正确性和可行性。
| [1] | HUI L, HOU SH D, PAT B, et al. Survey of Wireless Indoor Positioning Techniques and Systems[J]. IEEE Transaction on System, Man, and Cybernetics-Part C:Applications and Reviews, 2007, 37(6): 1067–1080. DOI:10.1109/TSMCC.2007.905750 |
| [2] | ALARIFI A, ALSALMAN A M, ALSALEH M, et al. Ultra Wideband Indoor Positioning Technologies:Analysis and Recent Advances[J]. Sensors, 2016, 16(5): 707. DOI:10.3390/s16050707 |
| [3] | 肖竹, 王勇超, 田斌, 等. 超宽带定位研究与应用:回顾和展望[J]. 电子学报, 2011, 39(1): 133–141. |
| [4] | JOHN O N, ALESSIO D A, ISAAC S, et al.Signal Processing Issues in Indoor Positioning by Ultra Wide Band Radio Aided Inertial Navigation[C]//The 17th European Signal Processing Conference Proceedings(EUSIPCO 2009).Glasgow, Scotland:IEEE, 2009:2161-2165. |
| [5] | 李奇越, 吴忠, 黎洁, 等. 基于改进卡尔曼滤波的NLOS误差消除算法[J]. 电子测量与仪器学报, 2015, 29(10): 1513–1519. |
| [6] | 毛科技, 邬锦彬, 金洪波, 等. 面向非视距环境的室内定位算法[J]. 电子学报, 2016, 44(5): 1174–1179. |
| [7] | MACGOUGAN G D, KLUKAS R.Method and Apparatus for High Precision GNSS/UWB Surveying[C]//Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation(ION GNSS 2009).Savannah:[s.n.], 2009:853-863. |
| [8] | WANN C D, HSUEH C S. Non-line of Sight Error Mitigation in Ultra-wideband Ranging Systems Using Biased Kalman Filtering[J]. Journal of Signal Processing Systems, 2011, 64(3): 389–400. DOI:10.1007/s11265-010-0493-6 |
| [9] | ZHANG K, HOFLINGER F, REINDL L. Inertial Sensor Based Indoor Localization and Monitoring System for Emergency Responders[J]. IEEE Sensors Journal, 2013, 13(2): 838–848. DOI:10.1109/JSEN.2012.2227593 |
| [10] | KOK M, HOL J D, SCHON T B. Indoor Positioning Using Ultrawideband and Inertial Measurements[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1293–1303. DOI:10.1109/TVT.2015.2396640 |
| [11] | WANN C D, YEH Y J, HSUEH C S.Hybrid TDOA/AOA Indoor Positioning and Tracking Using Extended Kalman Filters[C]//IEEE Vehicular Technology Conference(VETECS 2006).Kaohsiung, Taiwan:IEEE, 2006:1058-1062. |