


2. 河南理工大学, 河南 焦作 454000
2. Henan Polytechnic University, Jiaozuo 454000, China
遥感技术作为地面信息获取的综合技术,近年来取得了迅猛的发展,如何利用计算机图像处理技术快速自动提取有用信息是当前很多学者研究的热点。道路信息作为制图中不可或缺的部分,其提取方法已成为计算机图形学、数字摄影测量学、遥感科学等领域的研究重点[1]。虽然目前科学技术飞速发展,但是还没有能够精确识别道路网信息的系统,因此对道路信息的提取研究十分必要。
遥感影像中地物的提取方法与该地物的图像特征关系密切,遥感影像道路信息有着特殊的物理特征:道路通常用水泥或沥青材料铺设,表面平坦,乡间的小路除外;道路的宽度与道路等级有关,同一等级的道路宽度变化不大;道路的弯曲程度有限,曲率变化缓慢;道路表面颜色通常更加明亮,与邻域反差较大;道路面灰度较均匀,纹理信息统一等[2]。大部分道路信息的提取方法就是基于这些物理特征进行研究的。
目前进行道路自动提取的方法有数学形态法、平行线对法、多分辨率提取方法、地图匹配法等。本文基于数学形态法[3]利用边缘检测算法进行道路边缘检测后,对检测边缘线进行道路特征点的提取。具体步骤为:利用对比度增强增加影像中道路与其他信息的对比度,提高道路的辨识度,同时损失掉部分非道路信息;然后进行形态学滤波,滤除非道路信息,根据区域生长法填充少量面积较小的未滤除的非道路信息;利用Krisch算法提取道路边界;基于提取的道路边界提取特征点;最后对提取的特征点进行多项式拟合,将得到的函数模型应用于道路信息的矢量化,提高矢量化的效率。
1 图像的预处理图像预处理是图像处理的重要基础,对于获取真实准确的图像信息具有决定性的作用,对图像进行预处理是为了消除图像中的无关信息,增强需求信息的可检测性[4],为后续图像的特征提取、图像分割、图像匹配、图像识别等奠定基础。图像的预处理一般包括数字化、几何变换、时频变换、图像增强、图像恢复等。
为了准确提取道路边缘信息,首先要对道路信息进行影像增强,提升道路信息与其他信息的对比度。对比度是提取图像细节信息的重要属性,通过增强对比度检测人眼很难检测到的特征[5]。应用于道路提取则需要增强道路信息,而弱化非道路信息,便于道路线边缘的提取。现有的对比度增强算法有变换算法、直方图增强及一些混合算法。
1.1 直方图均衡化算法直方图均衡化能有效增强图像[6],实质上是一种点运算,即将输入图像划分为不同灰度级,并将同一灰度级赋予相同的灰度值[7]。变换关系为
 (1)
(1) 式中,S表示像素值g经过T (g)变换后的灰度值。
一幅图像的灰度级表示为区间[0,1]的随机值,用PDF (概率密度函数)表示,随机变量m的概率密度函数为Pm(m),则随机变量n的概率密度函数Pn(n)为
 (2)
(2) 经过变换得到图像的直方图为
 (3)
(3) 直方图均衡化即令Pn(n)=C (C为常数),则直方图均衡化式为
 (4)
(4) 选取一幅包含道路信息的遥感影像图进行裁剪,图片大小的设定如图 1所示,对其进行直方图均衡化得到的灰度图像如图 2所示。

|
| 图 1 原始影像 |

|
| 图 2 直方图均衡化 |
对比度拉伸变换实质是对图像上不同灰度值i根据一定的变换关系进行放大或缩小,从而改变图像的对比度,得到增强图像的效果。这里采用分段线性变换的方法对图像进行不同灰度区间的规则变换,如图 3所示,变换公式为

|
| 图 3 线性变换增强 |
 (5)
(5) 式中,pix[i]表示在第n+1区间灰度为i经过变换得到的新灰度值;(xn,yn)为第n+1区间变换的起始值;Kn+1为第n+1段的斜率。同样对图 1进行对比度线性增强,这里将其灰度值分为4段进行变换,选取的参数值如图 4所示。

|
| 图 4 对比度参数 |
两种方法提取信息比较见表 1。
| 图像 | 熵 | 均方误差MSE | 峰值信噪比PSNR |
| 原始图像 | 7.305 2 | 0 | 0 |
| 直方图均衡化 | 7.162 5 | 2 249.628 1 | 14.609 7 |
| 分段线性变换 | 5.132 1 | 4 199.520 9 | 11.898 8 |
熵表示图像灰度分布的聚集特性,描述图像信息源的平均信息量,熵越大,包含的信息量越丰富。由表 1可见,直方图均衡化的熵值高于线性变换的熵,说明直方图均衡化后图像的信息更加丰富。均方误差(MSE)表示处理后的图像与原始图像的灰度差值的平方期望值,值越小,图像的损失越小;峰值信噪比(PSNR)提供了图像失真或噪声水平的客观标准,其值越大表示图像失真越少。对比直方图均衡化的值和线性变换的值,说明均衡化后的图像的信息更加完整。而对于遥感影像的道路提取,图像信息量越大,越不利于道路信息的提取,会产生更多的干扰信息,因此选择分段线性变换的方法进行图像增强处理。
2 数学形态学滤波 2.1 形态学闭合运算数学形态学[8-9]算法具有算法简单、速度快的特点,广泛应用于数字图像处理技术,其基本思想是借助于形态结构元素提取和量测图像中相对应的形状,实现图像的特征分析。常用的结构元素有正方形结构、菱形结构和八角形结构等[10]。常用的形态学方法有腐蚀、膨胀、开启、闭合、击中或击不中变换等。闭合能使图像轮廓线更平滑,可用来填补细长的鸿沟和狭窄的间断,适用于去除遥感影像道路信息之外的信息,闭运算是使用一种结构元素对图像先进行膨胀运算后再进行腐蚀运算[11]。本文采用八角形结构进行图像的形态闭合,闭合得到的图像如图 5所示。

|
| 图 5 八角形闭合算子 |
闭运算得到的图像含有一些非道路信息,对道路信息的提取造成干扰,需要进行噪声去除,由于已经进行过八角形闭合,所得的图像已是二值图,噪声区域的值为0,通过种子点选取,进行种子点菱形结构的膨胀,进行区域生长,将与种子点连通的区域全部值改为1,实现了区域的填充。填充后的图像如图 6所示,算法流程如图 7所示。

|
| 图 6 区域填充 |

|
| 图 7 区域填充算法流程 |
道路边界的提取依赖于图像分割的边缘检测,图像边缘检测[12],相对于点特征来说,线特征更容易提取,因为线特征代表影像灰度在某一方向的连续分布,而点是孤立的,不具有连续性[13]。典型的边缘检测算子有:一阶差分算子和二阶差分算子。其中一阶差分算子有:Robert梯度算子、Sobel算子、Prewitt算子、Krisch算子等;二阶差分算子有:Laplacian算子、LOG算子、Canny算子等。由于已经使用形态学去除噪声,得到的图像只包含道路信息和极少的噪声,为获得较好的分割效果,本文采用Krisch分割算法。Krisch算子的8个掩模卷积核为
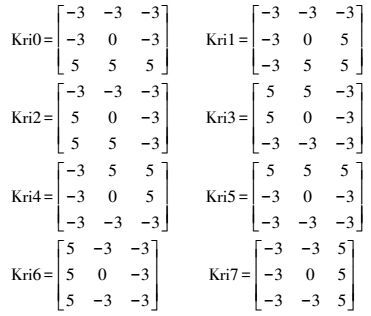
Krisch算法进行边缘检测的流程如图 8所示。

|
| 图 8 Krisch边缘检测流程 |
基于区域填充后的图 6,采用以上步骤检测到的边缘如图 9所示,与原影像叠加显示如图 10所示。

|
| 图 9 Krisch算子边缘检测 |

|
| 图 10 道路线与原影像叠加 |
道路边缘信息能够被有效地提取出来,由于滤波采用了数学形态学的闭运算,经过了腐蚀,图廓边缘不能完全重合,比原图像略微小一些,但是不影响道路信息的提取。
3.2 特征点提取特征点即影像上具有特殊性质的点,如边缘的交点、切点及区域轮廓的角点等。特征点提取是栅格矢量化的重要一步,是从提取的边缘中提取表示图像的关键特征。对于包含大量数据的图像,每一个像素点的信息都要保存,不利于进行矢量化,会产生大量的冗余数据,因此,可以通过提取明显特征点,保存必要的点的信息,再对这些点进行曲线拟合,用函数描述提取的道路信息,为后续的制图矢量化提供助力。目前大多数边缘轮廓线的特征点提取方法都是利用相邻的一组轮廓点计算该线上各点的曲率或夹角判定[14]。常用的特征点提取算法有:Moravec算子、Harris算子、Frostner算子、SUSAN角点检测算子等。Harris算子是对Moravec算子的改进,能有效地提取特征点,包括提取角点特征和边缘特征,并且提取的点分布均匀合理,其稳定性和准确度都较高。
Harris算子把窗口微小偏移能够引起超过某一特定值的灰度变化的点判定为特征点,像素点(x, y)的微小偏移Ex, y)由式(6) 计算
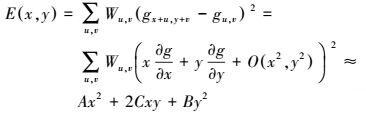 (6)
(6) 由于本试验需要提取道路线信息,不需要提取图廓边缘角点,将文献[14]中的x、y方向梯度算子fx=[-2-1 0 1 2]和fy=[-2;-1;0;1;2]改进为fx=[2 1 0 1 2]和fy=[2;1;0;1;2],这样提取的点就不包括图片轮廓角点。窗口函数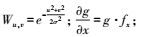

对于小偏移量(x, y),E(x, y)可以简单表示为
 (7)
(7) 式中,
 (8)
(8) 式中,detMu, v=AB-C2; trMu, v=A+B。
依据Harris算法原理,该算法流程如图 11所示。

|
| 图 11 特征点提取算法流程 |

|
| 图 12 特征点提取 |

|
| 图 13 角点响应测度 |
将提取的特征点进行曲线拟合,将点分成若干个组分别进行最小二乘法拟合,通过比较不同曲线的SSE (和方差,表示的是拟合数据和原始数据对应点误差的平方和,值越小,说明拟合得越好)找出最佳拟合曲线,并将此曲线模型作为该段道路边缘的函数特征,对所有的局部特征点进行拟合,生成一组拟合多项式方程,用于制图中矢量化[15]道路线的自动生成。
5 结语本文利用C#语言和Matlab实现了遥感影像的道路边线和道路特征点的提取,进行了影像增强、数学形态法滤波、Krisch算子提取道路边缘线和Harris算子提取特征点。对影像处理之前进行图像增强的优化是十分必要的,在很大程度上改善了图像的边缘提取时原影像中道路信息与其他地物信息对比度相差不大的问题,说明了基于对比度增强和数学形态学的道路信息提取方法是可行的,能应用于大量遥感影像的道路提取,可以减少人工作业,提高效率。并且,进行特征点提取能有效地减少数据的冗余,减少存储量。最后,可以利用模型拟合提取的特征点,以函数的形式表示道路信息,以便后期进行道路矢量化。
| [1] | 史文中, 朱长青, 王星. 从遥感影像提取道路特征的方法综述与展望[J]. 测绘学报, 2001, 30(3): 257–262. |
| [2] | 吴亮, 胡云安. 遥感图像自动道路提取方法综述[J]. 自动化学报, 2010, 36(6): 912–922. |
| [3] | 李雪林. 基于数学形态学的彩色图像边缘检测算法研究[D]. 武汉: 武汉理工大学, 2014: 11-20. http://d.wanfangdata.com.cn/Thesis/D573813 |
| [4] | 罗才清. 图像预处理算法研究[J]. 科学技术, 2013(11): 129–129. |
| [5] | CHWA D. Sliding-mode Tracking Control of Nonholonomic Wheeled Mobile Robots in Polar Coordinates[J]. IEEE Transactions on Control Systems Technology, 2004, 12(4): 637–644. DOI:10.1109/TCST.2004.824953 |
| [6] | 谭凯, 张永军, 童心, 等. 国产高分辨率影像自动云检测[J]. 测绘学报, 2016, 45(5): 581–591. DOI:10.11947/j.AGCS.2016.20150500 |
| [7] | 姜柏军, 钟明霞. 改进的直方图均衡化算法在图像增强中的应用[J]. 激光与红外, 2014, 44(6): 702–706. |
| [8] | 安如, 冯学智, 王慧麟. 基于数学形态学的道路影像特征提取及网络分析[J]. 中国图象图形学报, 2003, 8(7): 798–804. DOI:10.11834/jig.200307279 |
| [9] | 王思远, 张增祥, 文沃根, 等. 基于色彩理论与数学形态的彩色地图自动分层研究[J]. 测绘通报, 2001(10): 7–11. DOI:10.3969/j.issn.0494-0911.2001.10.003 |
| [10] | 王双. 高分辨率遥感影像道路提取方法研究[D]. 南京: 南京理工大学, 2014: 21-24. http://www.cnki.com.cn/Article/CJFDTotal-CSDI201618171.htm |
| [11] | 鲁学军, 武鹏达, 郭旭东. 二值形态闭运算在优质耕地集中连片划定中的应用[J]. 中国图象图形学报, 2016, 21(2): 199–206. DOI:10.11834/jig.20160209 |
| [12] | 雷丽珍. 数字图像边缘检测方法的探讨[J]. 测绘通报, 2006(3): 40–42. |
| [13] | 耿则勋, 张保明, 范大昭. 数字摄影测量[M]. 北京: 测绘出版社, 2010: 52-56. |
| [14] | 吴兴蛟, 吴晟. 基于边缘检测的位图矢量化的实现[J]. 计算机与数字工程, 2016, 44(2): 331–336. |
| [15] | 彭靖叶, 孙永荣, 黄斌. 基于特殊点跟踪的线目标矢量化研究[J]. 计算机工程与应用, 2015, 51(15): 198–201. DOI:10.3778/j.issn.1002-8331.1308-0078 |