


遥感技术的增强使得航测和遥感卫星提供的影像快速增多,空间、光谱与时间分辨率不断提高,为测绘学科提供了丰富的基础信息数据源。建筑物的特征识别和提取是遥感影像处理的基础之一,在目标跟踪[1]、图像处理[2]和目标辨识[3]等领域都具有重要意义。如何高效地利用遥感影像进行建筑物特征提取,已成为国内外遥感领域研究的热点。
直线作为遥感影像的基础特征之一,对其进行识别可反映影像的大量高层信息。对建筑物进行识别、提取和三维重建时,直线是其最重要、最稳定的特征。直线提取效果直接影响后续工作的准确性。对于直线提取,人们提出了许多算法:如Hough变换及其改进方法、相位编组法、链码法、最小特征根分析法和主元分析法(PCA)[4-8]等。其中,Hough变换及其改进方法是提出较早、最常用且应用最为广泛的算法,与其他4种方法相比,其抗噪能力强,直线识别能力强;但在复杂地形下,如教学区域,由于道路和绿化区的影响,应用Hough变换将会把大量密集且不属于同一直线上的短直线误识别成同一条直线,从而产生错误。
本文针对Hough变换缺点,研究并提出一种新算法。该方法通过对Hough变换进行改进,加入直线拟合[9]和角度先验方法[10],解决了Hough变换生成大量短直线和弧线的问题,并使其对教学区域内建筑物的识别能力和提取效率得到了很大的提高。
1 直线提取基本原理 1.1 提取流程试验先对影像进行预处理(如灰度化等),建立降噪滤波模型降噪;接着对处理结果进行初步直线检测和直线拟合,并提取建筑物所在最小矩形范围;最后对提取区域使用改进后的Hough变换进行直线提取并输出结果。提取流程如图 1所示。

|
| 图 1 提取流程 |
由于影像获取流程中外界条件和相机本身传感器限制的影响,每张遥感影像图都会存在噪声。噪声的存在将对影像特征提取产生很大的影响,去噪是遥感影像处理不可或缺的步骤。本次试验采用高斯滤波模型[11-12],其滤波函数如下
 (1)
(1) 式中,σ为方差,也可称其为模型的平滑尺度,它决定了高斯函数的宽度。σ过大会造成影像细节模糊和图像轮廓变形等问题,经多次试验发现,式(1) 中取σ=0.1并建立5×5的高斯去噪声模型对试验影像的噪声去除效果最佳。
1.3 边缘检测与直线提取边缘检测:直线特征提取前应对影像进行边缘检测,边缘检测的效果直接影响后续直线提取的结果。由于Canny算子拥有较好的检测精度和高信噪比[13],挑选其作为边缘检测算法加入试验。
直线提取:即Hough变换,其原理是利用图像空间和Hough参数空间的点线对偶性,把图像空间中的点线关系转换到参数空间中,将边缘提取结果中有一定关系的像元进行累加,设置直线判断阈值,超过阈值则判断为一条直线并输出[14-16]。
Hough变换公式如下
 (2)
(2) 式中,ρ为原点到直线交点的距离;θ为垂直于图像中直线的角度。
Hough变换原理如图 2所示。

|
| 图 2 Hough变换原理 |
本文结合直线拟合和角度先验思路对传统Hough变换算法进行改进,提高了其建筑物的识别能力和效率。算法步骤如下:
(1) 影像输入与预处理,使用5×5的高斯去噪声模型去噪,使用canny算子检测边缘信息(检测结果包含不需要的道路和绿化区信息)。
(2) 对边缘信息通过角度θ和距离ρ进行直线判断,并对每条短直线构造直线函数y=kix+bi。
(3) 以每条直线l0为基础,搜寻其余直线,设置条件k0×ki=1,保存满足条件的直线。若存在两条或两条以上与l0垂直的直线,且存在非l0的直线与剩下的直线相垂直,则提取4个相交端点并存储。
(4) 通过对比四点矩形区域的面积,最大矩形区域即需要保留的建筑物区域。划分区域并通过4个边界点由公式α=arctan[(y1-y2)/(x1-x2)]计算建筑区的两个方位角α1和α2(α1 < α2),即后续Hough变换的角度先验值。
(5) 以划分区域图上灰度值为255的点为中心、α1和α2为搜索方向进行同类点搜寻,设置阈值为70,保留大于阈值的直线并提取。
(6) 以提取结果图上灰度值为255的点为中心,沿着角度α1和α2方向进行同类点搜索,设置α1方向的阈值为40,设置α2方向的阈值为20,保留满足阈值的起始点,删除已搜索过的中心点。
(7) 连接起始点,输出直线提取结果。
3 成图分析为了更加直观地判断方法之间的优劣,本文运用MATLAB软件对提取结果进行图形建立,并与原影像图进行对比。对比结果如图 3—图 5所示。

|
| 图 3 原影像图 |

|
| 图 4 传统Hough变换提取 |

|
| 图 5 本文算法提取图 |
通过对图 3—图 5的对比分析可以得出,传统Hough变换对试验区域内建筑物的识别能力很差,提取出大量断裂的短直线和弧线,整体效果较差。本文算法排除了周边道路和绿化区域,对建筑物有很强的识别能力,由于加入了直线拟合和角度先验值,有效地抗拒了建筑物周边和内部的阴影与绿化噪声,较好地提取了建筑物的基本骨架线,线与线之间交点明显,提取效果较好。
4 精度检验通过算法识别的测区建筑物轮廓线,南北走向提取较为完整,东西走向出现多处漏线现象。对于提取直线精度,通过图上量取和实地丈量对相应的建筑物10条外围轮廓线进行对比检查,见表 1。
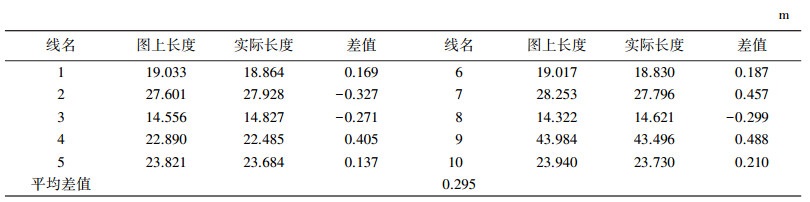
通过表 1可以得出,10条提取直线的检查结果最大误差为0.488 m,最小误差为0.137 m,平均误差为0.295 m。按最大误差,满足1:5000地形图的线长精度要求;按平均误差,满足1:2000地形图线长精度要求。
5 结论本文主要进行了Hough变换、直线拟合与角度先验、成图分析和精度检验的研究与分析,得到如下结论:
(1) 直线拟合的加入,有效地识别了建筑物区域,对周边绿化、道路有很强的抗性。
(2) 角度先验方法的加入使得建筑物提取线更接近基本骨架线,有效地解决了建筑区域内绿化和阴影噪声的影响。
(3) 保留直线起始点的方法,使得提取的直线间连接点明显,为后续的影像匹配及目标跟踪等图像处理步骤提供了很大的便捷。
(4) 提取精度较高,按最大误差,可达到1:5000地形图的线长精度要求;按平均误差,可达到1:2000地形图的线长精度要求。
该算法仍存在较多改进之处,如对建筑物上较小矩形提取效果不佳,在建筑物上的南北走向线提取较完整,东西走向线中出现多处漏线等现象。
| [1] | 张建伟, 张启衡. 基于直线边缘特征匹配的扩展目标跟踪方法[J]. 光学学报, 2009, 29(10): 2826–2831. |
| [2] | 孙显, 王宏琦, 张正, 等. 基于遥感图像的城市道路自动测绘方法研究[J]. 光学学报, 2009, 29(1): 86–92. |
| [3] | WU Wenyu, YIN Dong, ZHANG Rong, et al. Bridge Recognition of Median-resolution SAR Images Using Pun Histogram Entropy[J]. Chin. Opt. Lett, 2009, 7(7): 572–575. DOI:10.3788/COL |
| [4] | 王竞雪, 朱庆, 王伟玺, 等. 结合边缘编组的Hough变换直线提取[J]. 遥感学报, 2014, 18(10): 378–389. |
| [5] | 袁广林, 薛模根, 李从利, 等. 基于相位编组图像分块的快速变换直线检测[J]. 计算机测量与控制, 2005, 13(7): 647–649. |
| [6] | 潘大夫, 汪渤. 基于边缘方向的直线提取算法[J]. 北京理工大学学报, 2008, 28(6): 513–516. |
| [7] | GURU D S, SHEKAR B H, NAGABHUSHAN P. A Simple and Robustline Detection Algorithm Based on Small Eigenvalue Analysis[J]. Pattern Recognition Lett, 2004, 25(1): 1–13. DOI:10.1016/j.patrec.2003.08.007 |
| [8] | 马克, 阿尔贝托. 特征提取与图像处理[M]. 2版. 石英, 杨高波, 译. 北京: 电子工业出版社, 2010: 313-324. |
| [9] | 李增兵, 张晓帆, 李瑞华, 等. 直线拟合快速实现的一种新算法[J]. 计算机测量与控制, 2006, 11(32): 1524–1525. |
| [10] | 郭静钰, 齐宏亮, 袁媛, 等. 先验图像约束的有限角度CT图像重建算法[J]. 核电子学与探测技术, 2014, 12(3): 1421–1424. |
| [11] | 戴激光, 宋伟东, 李建军. 一种有效的直线提取算法[J]. 测绘通报, 2012(11): 59–61. |
| [12] | 王耀贵. 图像高斯平滑滤波分析[J]. 计算机与信息技术, 2008, 8(30): 79–81. |
| [13] | 王植, 贺赛先. 一种基于Canny理论的自适应边缘检测方法[J]. 中国图象图形学报, 2004, 8(11): 65–70. |
| [14] | 刘春阁. 基于自适应中值滤波和改进变换的直线提取[J]. 测绘科学, 2011, 36(6): 267–269. |
| [15] | 巫兆聪, 万茜婷, 梁静, 等. 粒度Hough变换及其在遥感影像直线检测中的应用[J]. 武汉大学学报(信息科学版), 2007, 10(4): 860–863. |
| [16] | 李明磊, 李广云, 王力, 等. 3D Hough Transform在激光点云特征提取中的应用[J]. 测绘通报, 2015(2): 29–33. |