



2. 中国资源卫星应用中心, 北京 100094
2. China Centre for Resources Satellite Data and Applications, Beijing 100094, China
图像位姿估计是计算机视觉及摄影测量学研究领域中的重要课题[1-2],贯穿航空航天测绘整个学科,研究精度高、速度快的影像位姿算法具有十分重要的理论与现实意义。姿态估计常常采用迭代解法和直接解法两种方法。迭代解法在摄影测量领域有广泛应用,其解算精度高,具有很好的几何意义,解算的结果准确度比较均匀,是一种严密的方法,但其缺点是运算量大[3],并且需要位姿初值。在没有初值的情况下,直接解法可以直接求解位姿参数,主要指直接线性变换(DLT)法,它是建立像点坐标和同名物方点坐标之间的直接线性关系,并采用最小二乘法获得最小代数误差解,由于不需要外参数(外方位元素)的初始近似值,如近景非量测数码影像或无人机影像处理[4-5],因此具有解算速度快等优点,但同时具有解算精度不高且参数没有明确几何意义的缺点,该方法作为迭代方法姿态初始值,在计算机视觉领域有较多的应用。因此,学者开始研究对传统方法进行改进,文献[6]将二维DLT初值经解析后得到标定参数初值,再利用光束法平差予以精化,取得了很好的效果。计算机视觉领域对于相机姿态估计的文献也比较多,文献[7—8]提出了两种有效的线性解算姿态方法,其中文献[8]提出的EPnP算法得到了较高的评价,并在后期全景图像姿态估计上获得不断改进[9]。另外,还有学者将影像位姿参数求解转化为立体几何边角关系[10]。
本文从摄影测量学基本方程出发,提出一种基于Procrustes理论和基点组结合的影像姿态估计新方法,试验结果表明,通过该方法得到的姿态参数精度较改进的投影矩阵分解方法要高。
1 共线方程的矩阵表达在摄影测量学研究中,采用欧几里得坐标表达物点和像点之间的关系,并且相关参数具有具体的物理意义,在相机经过检校并忽略影像畸变的情况下共线条件方程为
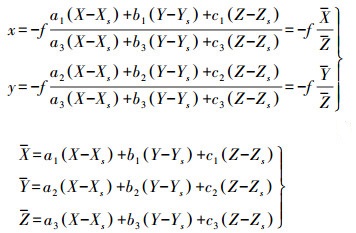 (1)
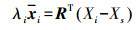
(1) 式中,x、y为像点量测坐标;X、Y、Z为物点坐标;Xs、Ys、Zs为相机位置;a1—c3为姿态角(φ-ω-κ)构成的旋转矩阵元素;若将式(1) 转换为矩阵[11-13],则可表示为
 (2)
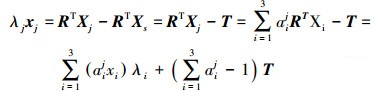
(2) 式中,R为像空间辅助坐标系到地面摄影测量坐标系的旋转矩阵;


 (3)
(3) 为表示方便,下文表述中以xi代替xi。
2 本文方法步骤在位姿估计研究中,关键是利用物方及像方同名点通过共线方程式(2) 估计式中的λi、R及Xs。由于这些参数耦合在一起,待求参数向量的显式表达式很难得到,因此所有参数解很难一次性解得,有必要对各个参数分别进行求解。
2.1 基点组选择为求得各个待定参数,首先选择基点组,即选择分布合理、质量可靠的3个物点作为基点,所有物点坐标向量均可由基点坐标向量进行表达。由于参数估计的质量受到基点选择的直接影响,因此,在所有参与姿态估计的像点所构成的凸包中,选择3点构成面积最大的一组像点对应的物点作为基点。如图 1所示,×为所有的像点,黑线为像点的凸包络线,由其节点参与姿态估计,而灰色三角形顶点为选取的3个基点。

|
| 图 1 图像基点组选择 |
{X1, X2, X3}为选择的基点组,由于基点不共线,则行列式|X1, X2, X3|≠0,令

(j=4, 5, …,N),则式(3) 可转化为
 (4)
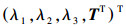
(4) 式中,T = RTXs。对式(4) 两侧同乘
 (5)
(5) 记式(5) 的最小二乘解为
 (6)
(6) 式中,α>0为标量,将式(6) 代入式(3) 中,得
 (7)
(7) 由旋转矩阵的保范数特性知
 (8)
(8) 由式(6) 和式(8) 可知,式(3) 转化为
 (9)
(9) 或

式中,
由此,问题转化为由V0和V1估计旋转矩阵R。这里直接采用Procrustes理论[14]计算三维相似变换模型,步骤如下:
2.3.1 计算幂等矩阵C (10)
(10) 式中,I为单位阵;L为元素为1的列向量。
2.3.2 奇异值分解M (11)
(11) 式中,D为单位阵;U和V为正交向量。
2.3.3 构建旋转矩阵R (12)
(12) 由旋转矩阵继而可得到图像外参数(角元素为φωκ转角系统)
 (13)
(13) 需要特别指出,在估计过程中,位姿参数间的相关性及控制点的不合理分布(如共线共面或原点设置等)直接影响解的精度和稳定性,针对该情况本文采用物方坐标归一化预处理[15],即Xi= WXi,W为相似变换矩阵。
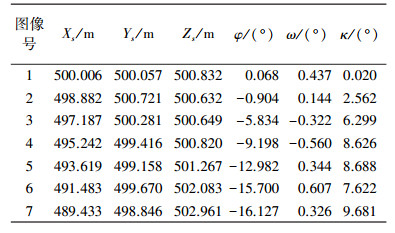
3 试验结果试验中,选用稀疏光束法平差[16](SBA)中7幅近景图像数据,由于原数据尺度未知,为定量分析方法的有效性,首先对其进行尺度放大(1000倍)及原点平移(500 m),使数据为米制,如图 2所示。选择所有数据中最大凸包点参与估计,每张像片参与估计的同名点数点见表 1,已知像点坐标、物方点坐标,外方位元素数据列于表 2。试验结果与已知位姿数据比较后,绝对误差分别见表 3、表 4。

|
| 图 2 7幅图像位姿及物方控制点分布情况 |

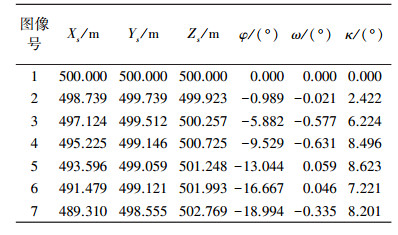
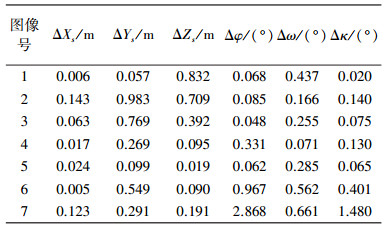
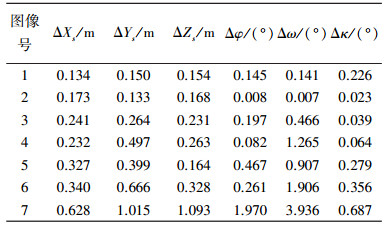
从表 4对比来看,本文方法最后得到的位置绝对误差最大值为0.983 m,基本在0.5 m内;姿态绝对误差最大值为2.868°,其余均在较小范围内,质量较好;相比改进的投影矩阵分解方法[9-10],本文方法在姿态估计的精度上有了明显提高,结果见表 5。如果以此结果作为初值,进一步通过迭代精化,位姿参数精度会进一步提高。
针对图像位姿估计问题,建立了一种分层估计位姿参数的方法,该方法通过选择分布质量较高的一组点作为基点,能有效提高图像姿态参数估计的质量。
(1) 建立了一种基于最大面积凸包的基点选择方法,该方法对于提高位姿参数估计质量具有重要意义。
(2) 由于DLT方法估计到的位姿参数精度较低,并且待估参数间具有很强的耦合性。为此,建立了分层最小二乘估计图像位姿方法,相比于直接对投影矩阵分解的方法,参数估计精度有很大提高,如果以此结果作为初值通过整体求解,位姿参数精度会进一步提高。
| [1] | 张祖勋, 苏国中, 张剑清, 等. 基于序列影像的飞机姿态跟踪测量方法研究[J]. 武汉大学学报(信息科学版), 2004, 29(4): 287–291. |
| [2] | 袁修孝, 余翔. 高分辨率卫星遥感影像姿态角系统误差检校[J]. 测绘学报, 2012, 41(3): 385–392. |
| [3] | 王之卓. 摄影测量原理[M]. 北京: 测绘出版社, 1980. |
| [4] | 冯文灏. 近景摄影测量——物体外形与运动状态的摄影法测定[M]. 武汉: 武汉大学出版社, 2002. |
| [5] | 李德仁, 郑肇葆. 解析摄影测量学[M]. 北京: 测绘出版社, 1992. |
| [6] | 张永军, 张祖勋, 张剑清. 利用二维DLT及光束法平差进行数字摄像机标定[J]. 武汉大学学报(信息科学版), 2002, 27(6): 566–571. |
| [7] | FIORE P D. Efficient Linear Solution of Exterior Orientation[J]. IEEE Trans. Pattern Analysis and Machine Intelligence, 2001, 23(2): 140–148. DOI:10.1109/34.908965 |
| [8] | LEPETIT V, MORENO-NOGUER F, FUA P. EPnP:An Accurate O(n) Solution to the PnP Problem[J]. International Journal of Computer Vision, 2009, 81: 155–166. DOI:10.1007/s11263-008-0152-6 |
| [9] | 邓非, 吴幼丝, 胡玉雷, 等. 球形全景影像位姿估计的改进EPnP算法[J]. 测绘学报, 2016, 45(6): 677–684. DOI:10.11947/j.AGCS.2016.20150411 |
| [10] | 冯其强, 李广云, 黄桂平. 数字工业摄影测量中的单像空间后方交会[J]. 测绘通报, 2008(6): 4–6. |
| [11] | 徐振亮, 闫利, 段伟, 等. 车载序列影像直接相对定向质量[J]. 辽宁工程技术大学学报(自然科学版), 2013, 32(3): 321–325. |
| [12] | 徐振亮, 李艳焕, 闫利. 单张大角度影像后方交会初值确定方法[J]. 辽宁工程技术大学学报(自然科学版), 2014, 33(7): 951–954. |
| [13] | 徐振亮, 闫利. 轴角描述的光束法平差新方法[J]. 武汉大学学报(信息科学版), 2015, 40(7): 865–869. |
| [14] | MAHBOUB V, SHARIFI M A. On Weighted Total Least-Squares with Linear and Quadratic Constraints[J]. Journal of Geodesy, 2013, 87(3): 279–286. DOI:10.1007/s00190-012-0598-8 |
| [15] | HARTLEY R, ZISSERMAN A. Multiple View Geometry in Computervision[M]. 2nd edition. Cambridge:Cambridge University Press, 2000. |
| [16] | LOURAKIS M, ARGYROS A. The Design and Implementation of Ageneric Sparse Bundle Adjustment Software Package Based on the Levenberg-marquardt Algorithm[C]//Technical Report 340.[S.l.]:Institute of Computer Science-FORTH, 2004. |