


天绘一号卫星是一颗传输型立体测绘卫星,其职能是实现全球无控精确定位。为此,后期处理过程中需要准确获知每行影像摄影时刻的卫星姿态和轨道数据。经过提取辅助操作后,原始影像数据被分为影像和辅助数据两部分,影像数据中不含任何辅助信息,后期处理中只能通过卫星产品中的行时文件将影像与辅助数据中的姿轨数据进行有效关联。如何检查影像与姿轨数据是否对应是本文重点解决的问题。
本文首先对天绘一号卫星影像数据、行时文件、辅助数据进行介绍,并详细分析3者间的关系;进而分析并验证影像与行时对应关系检查的必要性,最后提出一种影像与行时文件对应关系的检查方法,并通过试验对该方法的有效性进行验证。
1 原始影像数据天绘一号卫星原始码流数据经过解密、解压、成像等处理后生成原始影像数据,原始影像数据中存储有影像数据和辅助测量数据。图 1(a)为天绘一号卫星01星高分辨率相机某次获取的原始影像存储格式示意图。每行原始影像数据由辅助数据、绝对行号、影像数据组成。绝对行号占3个字节,一般在每次摄影过程中由0开始累积计数,相机每拍摄一行,绝对行号加1,如图 1(b)所示。可以看出绝对行号与每行影像存在严格的对应关系,即绝对行号是每行影像的唯一标识。

|
| 图 1 行时文件示意图 |
预处理系统收到原始影像数据后,首先从原始影像数据中提取出辅助数据,进而根据辅助数据信息对影像进行编目和分景。辅助测量数据主要包含行时文件、卫星惯性角速度、星敏四元数、卫星星历等数据。
2 行时文件卫星在摄影过程中产生线阵对时信息,建立影像与时间的对应关系。线阵对时信息由线阵绝对行号和该行影像曝光起始时刻的时间组成,保存在影像的辅助数据中,随影像数据一起下传。辅助数据中的行时文件主要由绝对行号、行时标时间、行周期组成,有起始行时标与基准行时标两种,如图 2(a)所示。相机开始摄影时,记录首行影像的起始时刻对应时标,称为本次摄影的起始时标;之后,记录每个GPS主动校时秒脉冲下降沿到来后的某个影像行的起始时刻对应的时间,称为本次摄影的基准时标。相邻两个基准时标间的影像行不再打入相应的时标,而由地面应用系统根据当前影像行之前(后)的最近一个基准时标值,以及相机行周期等参数内插计算得到,即辅助数据中的行时文件输出的频率为1 Hz, 地面需要根据行周期等信息在1 s内内插出每行影像对应的行时标,内插后的行时文件如图 2(b)所示。

|
| 图 2 行时文件内插结果示意图 |
由前文介绍可知,影像数据与姿轨数据无直接的对应关系,需要以行时文件为桥梁进行对应。行时文件的作用如图 3所示。影像数据与行时文件通过绝对行号建立对应关系,行时文件与姿轨等辅助数据通过行时标时间建立对应关系,从而间接实现影像与姿轨数据的对应。

|
| 图 3 影像与姿轨数据对应示意图 |
理论上影像与行时文件通过绝对行号能够实现准确对应,但在实际生产过程中发现,主要有两个因素会导致影像与行时文件的对应关系被破坏:一是卫星数据在下传过程中偶尔出现数据包丢失的情况,表现在影像上即为丢行,如果出现丢行但未进行处理,则极可能造成影像与行时不对应;二是天绘一号卫星的高分辨影像存在条带拼接、多光谱影像存在波段配准的问题,如果在拼接和配准过程中行时文件没有与影像一起平移,也会导致影像与行时不对应。
3.3 影像与行时不对应对产品定位精度的影响影像与行时文件不对应,理论上会导致影像与姿轨数据不对应,进而影响产品的定位精度。本节通过试验的方式对上述分析进行了验证。
本次试验随机选取了1景天绘一号02星2016年8月15日拍摄的高分辨率影像为测试数据,包含1A级和2级产品各1景。对于测试数据,分别改变1A级产品中影像与行时文件的对应关系,然后基于预处理系统生产2级产品,并在Global Mapper软件中读取地理坐标。图 4为行时文件与原始影像对应关系产生变化时的误差分布,横坐标分别表示测试行时文件与准确行时文件位置的差值,提前一行记作试验1,推迟一行记作试验-1,并以此类推。

|
| 图 4 误差分布 |
由图 4可以看出,点距误差与影像和行时的对应误差正相关关系比较明显,即影像与行时的对应误差越大,定位误差也越大。
4 影像与行时对应关系检查方法 4.1 试验数据本文选取了一轨03星2016年5月12日拍摄的数据作为试验数据,其中包含高分辨、多光谱、三线阵前视、三线阵正视、三线阵后视5个传感器影像各两景1A级数据。由于试验数据的随机性及预处理算法的普适性,本次试验结果可以作为最终的试验结论。
4.2 方法及步骤本文假定行时文件为不变量,仅检查原始影像数据经过处理后1A级产品每行影像对应的行时文件中的绝对行号是否与原始影像中的对应关系一致。例如,在1A级产品中,某一行影像处于该景的第N行,找到该景的行时文件第N行,并记下绝对行号为H1,然后在原始影像中找到该行影像对应的绝对行号,并记为H2。
具体步骤为:
(1) 通过编写C++程序,将原始影像中以模5000为0的行作为起始行,连续10行全部填0以作标记,并输出对应的绝对行号。
(2) 将作完标记的原始影像数据通过预处理系统生产成1A级产品,如图 5所示。

|
| 图 5 标记后高分辨1A级产品 |
(3) 随机挑选若干景生产后的1A级产品,在Photoshop中打开影像,找到标记处的起始行,记下在Photoshop中的纵坐标读数(坐标单位为:像素),并找到配套的行时文件相对位置相同的行,记下绝对行号为H1。
(4) 打开步骤(1) 中输出的绝对行号文件,记下标记处的绝对行号为H2。
(5) 以H1-H2为最终的对应偏差,据此得出影像与行时的对应关系。
4.3 试验结果为检验检查方法的有效性,本次试验分为两组,试验1中对原始影像中的丢线进行了处理,试验2屏蔽了预处理算法中关于丢线处理的模块。试验结果见表 1,表中H1、H2均用十六进制表示。
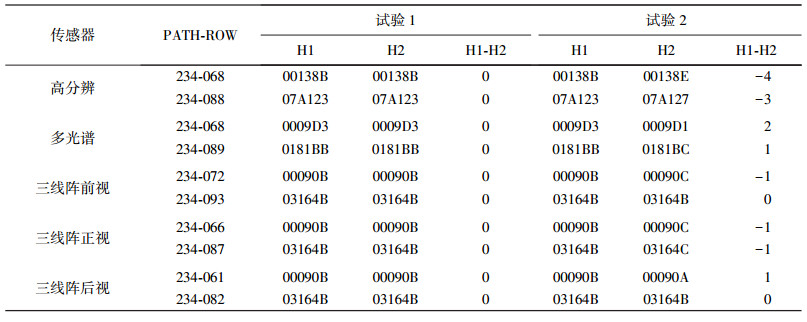
从表 1可以看出,经过丢线处理后,天绘一号卫星1A级产品影像与行时是完全对应的;未经过丢线处理,影像与行时的对应关系具有随机性;试验结果也验证了本文提出的影像与行时对应关系检查方法的有效性。
5 结语影像与行时对应关系的检查是对预处理算法性能评价的一项重要内容,也是保证产品质量的必要手段。天绘一号卫星每次在轨测试期间都要对影像与行时的对应关系进行检查,以消除影像与行时不对应对后期产品定位精度的影响。
本文在对天绘一号卫星原始影像数据、行时文件、辅助数据进行介绍的基础上,详细分析了3者间的关系,并验证了影像与行时不对应对定位精度的影响;最后提出了一种影像与行时文件对应关系的检查方法,该方法逻辑严密、步骤简单,是影像与行时对应关系检查的有效手段,可以为其他同类型卫星影像与行时对应关系的检查提供参考。
| [1] | 王任享. 三线阵CCD影像卫星摄影测量原理[M]. 北京: 测绘出版社, 2006. |
| [2] | 王任享, 胡莘, 杨俊峰, 等. 卫星摄影测量LMCCD摄影机的建议[J]. 测绘学报, 2004, 33(4): 24–28. |
| [3] | 王任享, 王建荣, 王新义, 等. LMCCD相机卫星摄影测量特性[J]. 测绘科学, 2004, 29(4): 15–17. |
| [4] | 韩晓青, 杜红悦. 边缘追踪模型与SURF检测结合提取天绘影像机场目标[J]. 中国图象图形学报, 2016(10): 1337–1347. DOI:10.11834/jig.20161008 |
| [5] | 胡莘, 曹喜滨. 三线阵立体测绘卫星的测绘精度分析[J]. 哈尔滨工业大学学报, 2008, 40(5): 695–699. |
| [6] | WANG R X. Mapping Satellite without Control Point in China[J]. Hydrographic Surveying and Charting, 2008, 28(5): 1–8. |
| [7] | 王任享, 胡莘, 王新义, 等. "天绘一号"卫星工程建设与应用[J]. 遥感学报, 2012, 16(S0): 2–5. |
| [8] | 臧熹, 杨博, 齐建伟, 等. 一种改进的遥感影像地形校正方法[J]. 测绘通报, 2015(1): 75–80. |
| [9] | 毛召武, 程结海, 袁占良. 一种高分遥感影像物体分割质量评价方法[J]. 测绘通报, 2016(5): 36–40. |
| [10] | 李广泽, 孙德柱, 刘全国. CAN总线在测绘相机控制器中的应用设计[J]. 电光与控制, 2012(8): 82–89. |
| [11] | 明冬萍, 邱玉芳, 周文. 遥感模式分类中的空间统计学应用——以面向对象的遥感影像农田提取为例[J]. 测绘学报, 2016, 45(7): 825–833. DOI:10.11947/j.AGCS.2016.20150520 |
| [12] | 孙韬, 王鹏波, 方俊永, 等. 天绘一号03星三线阵/多光谱载荷影像质量评价[J]. 遥感学报, 2016(6): 1335–1341. |
| [13] | 朱虹. 数字图像处理基础[M]. 北京: 科学出版社, 2005: 31-55. |
| [14] | 王重阳, 程挺, 王慧, 等. "天绘一号"卫星在轨几何定标方法[J]. 海洋测绘, 2016(4): 31–34. |
| [15] | 黄杰, 王光辉, 胡高强, 等. 高分辨率彩色遥感影像变化检测方法研究[J]. 测绘通报, 2016(8): 30–34. |