


2. 武汉理工大学智能交通系统研究中心, 湖北 武汉 430063;
3. 武汉光庭信息技术股份有限公司, 湖北 武汉 430073
2. Intelligent Transportation Systems Center, Wuhan University of Technology, Wuhan 430063, China;
3. Wuhan KOTEI Informatics Co. Ltd., Wuhan 430073, China
道路平面几何作为道路的基本特征是很多研究的关键。如文献[1-2]中基于道路的几何特征进行路网匹配;文献[3-4]通过道路几何相似性检测路网差异、变化;文献[5]对不同道路几何特征条件下的车速自适应控制进行了研究。
随着智能交通系统 (ITS)、先进驾驶辅助系统 (ADAS) 和自动驾驶技术的发展,现有的商用导航地图由于在精度、内容和完整性方面的缺乏,已经不能满足更高层次运用的需求[6];在智能交通领域,对高精度地图的需求已经得到了普遍认识和接受[7]。高精度的道路位置信息可以用于车辆定位辅助。文献[7]提出了一种基于立体视觉和高精度地图的定位方法,通过将检测车道线与高精度地图进行对齐,达到了亚米级的定位精度。Tao Z等[6, 8]首先构建高精度的车道线地图,通过匹配算法提高了GPS定位精度。Levinson J[9]通过粒子滤波将激光雷达测量数据与高分辨率地图数据进行匹配,实现了城市区域实时的10 cm级的定位精度。在车辆运动决策方面,Gu Yanlei[10]在多种被动传感器集合定位中,使用车道线地图的道路方向对IMU航向角进行修正,并用于监测车辆变道行为。Takeuchi Eijiro[11]使用高精度地图,结合粒子滤波对交叉路口的交通情况进行预测,控制车辆通过路口的速度,实现了自动车在狭窄交叉路口的安全通过。准确、光滑的道路几何描述对于车辆行驶路径规划有很大帮助,文献[12]通过生成分段二阶连续的贝塞尔曲线规划出曲率连续的自动车行驶轨迹引导车辆行驶。Bae I[13]通过地图中得到的离散点目标轨迹数据计算曲率,通过曲率值得到自动车转向参数,进行车辆转向控制。
现有的高精度地图通过提高地图数据采集精度,沿道路线、车道线密集采点来保证道路几何信息的准确性;通过大量形点构造车道级的高精度地图,其粒度更细,内容更丰富, 对道路进行更详尽的描述。但这也造成了数据量的大幅增加,且通过密集的形点数据来计算道路的几何特征会耗费终端有限的计算资源。综上,本文提出了一种面向高精度地图的、基于里程参数的道路平面几何解析模型。该模型能较好地减少数据冗余, 保证几何描述的准确性,通过它能方便快捷地计算道路任意点处的几何特征。
1 现有的道路几何描述模型 1.1 传统导航数据几何模型传统导航数据将交通网络抽象为节点和弧段的集合。用道路中心线对其进行表达,即弧段。节点往往是路口和道路属性变化的位置。交通网络的交通信息作为节点或弧段的属性存储,由弧段的连通性建立路网的拓扑关系。受传统GIS拓扑学的影响,节点/弧段模型仍然是一种主流的导航数据模型[14]。在传统导航数据中,道路几何通过其中心线来表达,即有序的 (x,y) 坐标序列。采样点的密度、精度决定了其几何描述的准确性。由于使用道路中心线来表达面状道路几何,其表达粒度只达到“道路级”,道路内部的信息丢失严重。因此,精度、粒度、内容等方面的缺失,导致传统导航数据难以满足在智能交通领域更高层次的运用需求。
1.2 基于线形的几何描述模型在交通部门道路设计中,主要使用直线、圆、缓和曲线3种线形。通过线形参数对道路几何进行描述是最直接的道路几何描述方法。直线和圆可以通过直线和圆的方程来进行描述。但缓和曲线几何描述就显得较为困难。缓和曲线的基本特征是曲线上任一点的曲率半径r和该点距曲线起点弧长l的乘积为一常数,即
 (1)
(1) 式中,R为缓和曲线终点的曲率半径;L为缓和曲线的总弧长;A为一常数值。以缓和曲线起点为坐标原点,起点处切线方向为x轴,法线方向为y轴,建立局部直角坐标系,缓和曲线可用参数方程描述
 (2)
(2) 式中,β=l2/2RL;l为任意点到缓和曲线起点的弧长;(x,y) 为任意点在缓和曲线局部坐标系下的直角坐标。由式 (2) 可以看出,缓和曲线是复杂的高次连续曲线[15],它不能用初等函数表示。对式 (2) 进行数值积分并对式中三角函数进行麦克劳林级数展开可以求解得缓和曲线在其局部坐标系中的表达式,即
 (3)
(3) 文献[16]给出了道路线形参数计算的具体方法,不再赘述。基于线形的道路几何描述,存在3个困难:①几何构建困难:缓和曲线几何表达式复杂,且该表达方式在缓和曲线局部坐标系下;②描述数据的结构不统一:直线可以通过斜率k和截距b来进行表达,圆通过圆心坐标 (x0, y0) 和半径R来表达,缓和曲线通过记录其局部坐标系信息、缓和曲线参数来表达;③线形识别困难:缓和曲线在靠近直线端表现为直线,在靠近圆端表现为圆,不易识别,当A较大时,这种困难尤为明显[17]。
2 基于里程参数的道路平面几何解析模型 2.1 数学模型的建立在交通网络中,道路几何复杂,形点坐标序列不一定满足一个严格的函数关系,如东西走向的道路可以通过一个y=f(x) 的函数关系进行描述,南北走向的道路反之;对更复杂的道路,描述方程中自变量并不单调,描述起来更加困难。本文引入里程s作为参数,通过约束最小二乘法求解得两个参数方程

对道路平面几何进行解析表达。这一方面保证了参数的单调性,另一方面与道路形点沿道路线性分布这一自然特征也是吻合的。
高精度地图沿道路线密集采集形点来保证道路几何描述的准确性,其形点沿道路线性分布,精度较高,数据间表现出普遍的线性相关。为避免对病态方程组直接求解,可构造点集上的正交多项式系作为基函数组[18]。
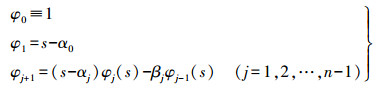
在点集si(i=0, 1, …, m) 上的正交多项式系可由以下递推公式构造[18]
 (4)
(4) 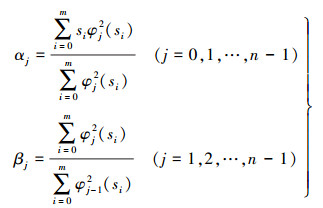 (5)
(5) 式中,n(n≤m) 为多项式的次数。通过式 (4)、式 (5) 可以构造任意点集上的正交多项式系,它在点集si(i=0, 1, …, m) 上是离散正交的。在本文的模型中,通过动态地构造点集上的正交多项式系{φ0(s), φ1(s), φ2(s), φ3(s)},以此为拟合基函数组进行道路几何参数的计算。
对于一条k个分段的道路,其几何形状可以通过k个参数方程组进行解析表达,即
 (6)
(6) 式中,(xij, yij) 为第j(j=1, 2, …, k) 个分段内第i(i=0, 1, …, m) 个形点的直角坐标;sij为相应的里程;fxj(s) 表示第j个分段内的x关于s的参数方程;f(s)=c0φ0(s)+c1φ1(s)+c2φ2(s)+c3φ3(s),c0、c1、c2、c3为待定系数。
为保证曲线在分段点处的连续与光滑,要求前后两段曲线在分段点处函数值和一阶导数相等,即需要加入式 (7)、式 (8) 两个端点约束条件。
连续约束条件
 (7)
(7) 光滑约束条件
 (8)
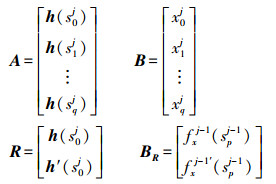
(8) 设第j-1个分段有p+1个形点,第j个分段有q+1个形点,以第j个分段的参数方程x=fxj(s) 的求解为例。
首先,令h(s)=[φ0(s) φ1(s) φ2(s) φ3(s)],c=[c0 c1 c2 c3]T;显然f(s)=h(s)·c。
其次,构建约束最小二乘方程组
 (9)
(9) 式中
对于式 (9) 的求解,一般有惩罚函数法和Lagrange乘数法两种方法。惩罚函数法既可以处理过约束问题,也可以处理欠约束问题,但无法得到精确的结果;Lagrange乘数法能够得到精确的结果,但一般只使用于欠约束情况[19]。本文构建的数学模型只有0阶和1阶连续两个约束条件,属于欠约束情况,且为保证地图的精度,需得到方程的精确解,因此采用Lagrange乘数法对式 (9) 进行求解。
根据式 (9),构造Lagrange函数L(c, λ)=||Ac-B||+2λ(Rc-BR),由求多元函数极值的必要条件得
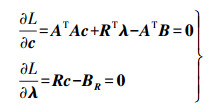 (10)
(10) 将式 (10) 写成矩阵的形式
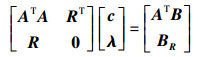 (11)
(11) 式 (11) 为约束最小二乘问题的正规方程,它有唯一解,求解得c和λ,即得到该参数方程的表达式。同样,对第二个参数方程y=fyj(s) 进行求解,即可得到该分段内的几何描述参数方程组。
3 试验验证 3.1 试验数据使用本文模型已经进行了实际数据生产。数据为2015年北京京承高速北五环至密云收费站单向60 km、双向120 km的加密后高精度地图,数据如图 1所示。

|
| 图 1 试验高精度地图 |
图 1中的灰色方框内是放大的高精度导航地图,在高精度导航地图中,道路表现为面状;图中深灰色线为车道中心线,白色虚线为车道线,浅灰色线为道路边线。称道路最左侧印刷线的中心线为道路参考线 (图中黑色线);在路口等无车道线区域,根据道路的连接关系,使用贝塞尔曲线构建道路间的虚拟参考线、车道间的虚拟中心线进行连接。用参考线的几何形态表达道路几何;各车道表达为相对参考线的横向偏移t,(s, t) 的关系也可通过解析式表达。实际生产中,参考线是道路的几何基础,尤为重要;本文仅就道路平面几何进行探讨。
3.2 动态分段算法为了保证各个分段的误差可控,本文提出了一种基于最大误差的动态分段算法,并使用该方法对道路进行动态分段拟合。
任意拟合数据点pi的拟合误差表现为x方向和y方向的误差
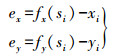 (12)
(12) 根据式 (12) 计算得到两个方向的误差ex、ey,则该点处的拟合误差为
 (13)
(13) 根据式 (12)、式 (13) 统计各个拟合点的拟合误差,这些误差的最大值即为拟合最大误差maxe。以maxe作为分段基准,当maxe超过限差error_limited即产生新的分段。
图 2为基于最大误差的动态分段算法程图。在算法中,第一个分段并不进行约束,而是采用一般最小二乘法进行拟合,得到第一个分段的参数方程组,通过该方程组计算后一分段的连续和光滑约束条件,再使用本文建立的数学模型对分段进行求解,直到整条道路分段拟合完毕。

|
| 图 2 动态分段算法流程 |
使用本文模型生产的120 km高精度高速道路数据已交付使用。本文选取3条在几何上较为典型的道路数据进行说明。
3条典型道路的原始数据如图 3(a)所示,Road1为一段直行高速道路,全长3 022.39 m,共614个形点;Road2为一段转弯高速道路,全长2 782.98 m,共339个形点;Road3为一段匝道,全长568.50 m,共353个形点。从图中可以看出其几何形状复杂度依次递增。

|
| 图 3 典型道路数据和分段拟合结果 |
根据上文中的算法,设定分段拟合的最大误差限差为0.1 m,对本文试验数据进行动态分段拟合,拟合结果如图 3(b)所示。图 4给出了各试验道路的拟合误差分布情况。可见,使用本文算法实现了误差可控。

|
| 图 4 试验道路误差分布 |
表 1给出了Road2几何描述的一段实例数据。对每一分段,使用两个参数三次多项式方程和分段起点处里程s,共9个参数进行数学描述。通过表 1中的数据,能对试验道路几何形状进行准确的描述,通过一定的计算能获取道路任意点处完整的几何信息。
| Road2道路全长/m | 分段 | 分段终点里程/m | 几何描述参数 | |||
| C3 | C2 | C1 | C0 | |||
| 2 782.98 | Segment1 | 0.0 | -4.70e-10 | 5.65e-07 | -0.384 24 | 4.791 97e+05 |
| 1.98e-10 | -2.40e-07 | -0.923 22 | 4.462 15e+06 | |||
| Segment2 | 1 050.18 | 8.97e-07 | -0.003 08 | 3.120 29 | 4.778 77e+05 | |
| -3.58e-07 | 0.001 23 | -2.333 30 | 4.462 69e+06 | |||
| Segment3 | 1 157.21 | 1.08e-05 | -0.038 57 | 45.385 34 | 4.611 13e+05 | |
| -4.59e-06 | 0.016 39 | -20.394 25 | 4.469 85e+06 | |||
| … | … | … | … | … | … | |
| … | … | … | … | |||
| 注:表中数据进行了截断。 | ||||||
表 2是几何表达数据压缩比统计表。可以看到,道路1只使用两个分段就表达了614个形点的几何信息,数据压缩比达到98.53%;形状稍为复杂的道路2,使用14个分段表达了339个形点的几何信息,数据压缩比为81.42%;形状更为复杂的道路3虽然产生了19个分段,也达到了75.78%的压缩比。
| 道路 | 分段数 | 本文模型数据量E/Byte | 离散点数据量D/Byte | 压缩比F/(%) |
| Road1 | 2 | 144 | 9824 | 98.53 |
| Road2 | 14 | 1008 | 5424 | 81.42 |
| Road3 | 19 | 1368 | 5648 | 75.78 |
| 注:压缩比F=(D-E)/D。 | ||||
本文提出的道路几何解析模型不仅能减少高精度道路几何数据冗余,其优势还体现为几何描述准确及几何特征计算方便。
几何描述准确体现在两个方面:几何位置准确及几何形状光滑。本文通过基于最大误差的动态分段算法保证了解析模型误差可控,其位置信息是准确的。同时,连续、光滑约束条件保证道路在全局内一阶连续,道路几何是光滑的。
几何特征计算方便指的是通过本文模型,能够快速计算得到道路任意点处的几何特征。对参数方程求一阶导数、二阶导数,可以快速得到道路任意点处的航向角、曲率信息。若直接通过离散点来计算这些信息,由于离散点中存在噪声,计算结果往往不够准确,通常需要通过局部拟合来完成几何特征计算,这增加了终端的计算开销;另一方面,局部拟合受局部影响大,未考虑道路整体几何特征,通常不能很好地表达道路的实际几何形态。本文以道路为整体进行分段拟合,道路内全局光滑。使用本文提出的几何描述方法计算几何特征是方便、快捷的。
综上所述,本文提出的道路几何描述模型在很大程度上减少了几何描述数据冗余,能对道路几何进行准确地描述,能快速、便捷地计算道路几何特征。因此本文提出的道路几何描述模型对于智能驾驶具有一定的意义。
4 结语由于现有的商用导航地图精度不够高、粒度不够细、内容不够丰富,高精度地图在ITS和自动驾驶领域得到了越来越多的运用;但现有的高精度地图几何描述数据冗余难以直接、快速地计算道路几何特征信息。本文提出了一种面向高精度导航地图的、基于里程参数的道路几何解析模型。通过构建正交多项式系和约束最小二乘法,根据最大误差动态地进行分段拟合,求解道路几何解析模型参数。使用本文模型进行了120 km数据的生产,文中给出了3段典型高精度地图道路数据的试验实例,验证了该模型对高精度地图道路几何描述具有一定优势,证明该模型能对道路几何进行准确的描述,最大限度地减少了数据冗余,用其能快速、便捷地计算道路几何特征,对智能驾驶具有积极意义。
| [1] | 陈玉敏, 龚健雅, 史文中. 多尺度道路网的距离匹配算法研究[J]. 测绘学报, 2007, 36 (1) : 84–90. |
| [2] | 杨必胜, 栾学晨. 利用概率松弛法的城市路网自动匹配[J]. 测绘学报, 2012, 41 (6) : 933–939. |
| [3] | 唐炉亮, 杨必胜, 徐开明. 基于线状图形相似性的道路数据变化检测[J]. 武汉大学学报 (信息科学版), 2008, 33 (4) : 367–370. |
| [4] | 张韵, 李清泉, 曹晓航, 等. 一种道路网信息几何差异检测算法[J]. 测绘学报, 2008, 37 (4) : 0–520. |
| [5] | 张蕊. 考虑道路几何特征的车速自适应控制方法研究[D]. 武汉: 武汉理工大学, 2014. |
| [6] | TAO Z, BONNIFAIT P, FREMONT V, et al. Mapping and Localization Using GPS, Lane Markings and Proprioceptive Sensors[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).[S.l.]:IEEE, 2013:406-412. |
| [7] | NEDEVSCHI S, POPESCU V, DANESCU R, et al. Accurate Ego-vehicle Global Localization at Intersections through Alignment of Visual Data with Digital Map[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 673–687. DOI:10.1109/TITS.2012.2228191 |
| [8] | TAO Z, BONNIFAIT P, FREMONT V, et al. Lane Marking Aided Vehicle Localization[C]//201316th International IEEE Conference on Intelligent Transportation Systems-(ITSC).[S.l.]:IEEE, 2013:1509-1515. |
| [9] | LEVINSON J, MONTEMERLO M, THRUN S.Map-based Precision Vehicle Localization in Urban Environments[C]//Robotics:Science and Systems.[S.l.]:IEEE, 2007. |
| [10] | GU Y, HSU L T, KAMIJO S. Passive Sensor Integration for Vehicle Self-localization in Urban Traffic Environment[J]. Sensors, 2015, 15(12): 30199–30220. DOI:10.3390/s151229795 |
| [11] | TAKEUCHI E, YOSHIHARA Y, YOSHIKI N. Blind Area Traffic Prediction Using High Definition Maps and LiDAR for Safe Driving Assist[C]//2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC).[S.l.]:IEEE, 2015:2311-2316. |
| [12] | CHOI J W, CURRY R, ELKAIM G. Piecewise Bezier Curves Path Planning with Continuous Curvature Constraint for Autonomous Driving[M]//Machine Learning and Systems Engineering.[S.l.]:Springer Netherlands, 2010:31-45. |
| [13] | BAE I, KIM J H, KIM S.Steering Rate Controller Based on Curvature of Trajectory for Autonomous Driving Vehicles[C]//2013 IEEE Intelligent Vehicles Symposium (Ⅳ).[S.l.]:IEEE, 2013:1381-1386. |
| [14] | GOODCHILD M F. GIS and Transportation:Status and Challenges[J]. GeoInformatica, 2000, 4(2): 127–139. DOI:10.1023/A:1009867905167 |
| [15] | 王明生, 闫小勇. GIS环境下缓和曲线绘制方法研究[J]. 工程图学学报, 2010 (1) : 156–160. |
| [16] | 姚连璧. 车载GPS道路数据采集与线形参数的计算[J]. 测绘学报, 2002, 31 (S0) : 45–49. |
| [17] | 杨轸, 方守恩, 高国武. 基于GPS的道路线形恢复技术的研究[J]. 同济大学学报 (自然科学版), 2003, 31 (5) : 567–571. |
| [18] | 颜庆津. 数值分析[M]. 北京: 北京航空航天大学出版社, 2006. |
| [19] | 朱伟东. 反求工程中基于几何约束的模型重建理论及应用研究[D]. 杭州: 浙江大学, 2007. |