


2. 北京未来城市设计高精度创新中心, 北京 102616;
3. 武警黄金第七支队, 山东 烟台 264000;
4. 国核电力规划设计研究院, 北京 100092
2. Beijing Advanced Innovation Center for Future Urban Design, Beijing 102616, China;
3. No. 7 Gold Geological Party of CAPF, Yantai 264000, China;
4. State Nuclear Power Planning Design & Research Institute, Beijing 100092, China
室内定位[1]作为实现基于位置服务(LBS)的实质性拓展,可有效解决“LBS最后一米”的瓶颈问题。近年来,无需任何额外硬件设施投入的地磁室内定位技术获得重大研究进展,成为低成本、低复杂度、高精度室内定位最有前景的技术方案之一。地磁场是地球固有的基本特性,是一种具有大小和方向且随空间分布和时间而变化的无处不在的矢量场,近地空间上任意一点都有唯一的磁场矢量与之对应。现代建筑物特有的钢筋混凝土结构及金属材料,所铺设的电力系统、电气和电子设备、工业设备等均影响着相对恒定的地磁场,形成地磁干扰场。
在地磁室内定位[2]技术的实现过程中,地磁基准图的建立是非常重要的环节。首先,室内空间地磁信息利用移动平台搭载的HMC5983磁传感器和惯性导航传感器进行数据采集,因此需要对地磁传感器进行相关的前期改正,如硬铁改正等,保证数值的真实性;其次,在建立某室内空间地磁基准图之前,要充分了解该空间复杂的地磁干扰环境,包括固定要素和移动要素对地磁的干扰强度、范围等特点。室内空间地磁干扰要素的特征分析具有重要的研究意义。
1、 地磁作为室内定位研究 1.1. 磁场不随时间的推移而变化地磁场源于地球内部,在不受外太空的干扰条件下十分稳定。为研究室内磁场稳定性,进行如下试验:将HMC5983磁传感器安置在无外界磁干扰的室内环境中,设置采样间隔为30 min,采集一个月的磁场值数据。图 1为磁场值随时间的变化图,横轴为时间,纵轴为磁场值。数据出现多次异常增大或减小现象, 但反观其周围数据发现, 仅一点出现数据异常, 周围点数据正常, 磁场波动在10~500 nT之间,是所在位置平均磁场值(51.65 μT)的0.96%。该试验研究发现磁场值随时间变化波动仅是本地平均磁场值的0.96%,时间不是影响地磁室内定位的干扰因素。

|
| 图 1 磁场值随时间变化 |
磁场值变化可以直接通过地磁传感器测量得出,并以非常简洁的矢量形式提供三轴(x、y、z轴)方向磁场值及总磁场值。设磁传感器采样间隔为500 ms,传感器自身坐标系y轴指向北方向,距固定铁磁性材料垂直于走廊中轴线方向10 cm处沿走廊方向以0.2 m/s的速度拉动,采集走廊一维地磁场。如图 2所示,坐标轴横轴代表磁传感器行进的距离,单位为m;纵轴代表磁场值,单位为μT;磁传感器沿走廊方向经过每个设备所产生的数值曲线,每一个谷值可标记为一个铁磁性设备。从数据中得知,此次试验磁场值变化范围为22.56~56.79 μT,该变化范围之广可以充分说明,在室内环境下地磁场随空间的变化十分明显。

|
| 图 2 建筑物走廊一维地磁图分布 |
该套室内定位系统由多个模块组合而成,如图 3所示,包括地磁数据采集模块、航迹推算模块、无线通信模块、避障模块、主控模块等。

|
| 图 3 移动平台构造实例 |
采集数据前首先需要对HMC5983进行硬铁补偿试验,确保地磁数据的真实性。磁传感器自身的各个电子元器件设计时位置是相对恒定的,通电后产生一个相对恒定的干扰场,该干扰磁场称为硬铁干扰场。在磁传感器输出值上加一个定值便可消除硬铁干扰[3]的影响。磁传感器绕自身坐标系z轴旋转所产生的x轴和y轴磁场值应形成圆圈,其圆心应位于自身坐标系,但硬铁干扰的存在使圆心有所偏离。以磁传感器z轴为旋转轴均匀旋转一周,并记录整个过程中磁场x轴和y轴方向的磁场分量,如图 4所示。硬铁补偿改正数,即标度系数(xsf,ysf)和x轴、y轴磁场值偏移量(xoff,yoff)的计算方法如下
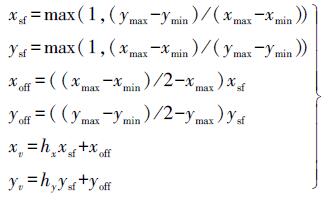 (1)
(1) 式中,(xmax,xmin)及(ymax,ymin)分别为磁场x轴和y轴方向的最大值和最小值;(hx,hy)为x轴、y轴方向的原始磁场值;(xv,yv)为硬铁补偿后的x轴、y轴方向磁场值。
2.2. 航迹推算模块 2.2.1. 惯性导航传感器航迹推算模块由惯性导航传感器[4]和车轮编码器组成。将惯性导航传感器固定在移动平台几何中心,组成移动平台捷联式惯性导航系统。本文采用四元数法[5]求解姿态矩阵,并利用四元数输出的姿态角数据和陀螺仪输出的角速度数据进行卡尔曼滤波,得到更加精确的姿态角。卡尔曼滤波步骤如图 5所示。

|
| 图 4 磁传感器硬铁补偿前后的磁场值比较 |

|
| 图 5 卡尔曼滤波在姿态角数据更新中的应用 |
根据四元数计算公式得出,姿态角存在很大的波动性,采用卡尔曼滤波[6]在一定时间内对滤波前和滤波后航向角数据进行对比,如图 6所示。

|
| 图 6 航行角数据滤波前和滤波后对比 |
| (°) | |||
| 序号 | 理论值 | 真实值 | 误差 |
| 1 | 0 | -4.50 | -4.50 |
| 2 | 10 | 13.60 | 3.60 |
| 3 | 20 | 24.30 | 4.30 |
| 4 | 30 | 33.40 | 3.40 |
| 5 | 40 | 36.50 | -3.50 |
经滤波后,航向角数据有明显的改善,最大误差从-4.5°减小到0.12°,经改善的航向角误差平均值为0.29°,大大提高了航向角精度。
2.2.2. 车轮编码器三轮移动平台[7]优点很多,其运行过程中稳定性好,是轮式机器人常用的机身结构。
图 7是双轮差动驱动机构在运动过程中的分析图。

|
| 图 7 移动平台运动分析 |
在该试验中,假设移动平台为刚性机构,且车轮和地面不打滑,则差动驱动运动机构在点B位置的姿态为
式中,(xB, yB)是点B在二维平面的坐标;θ为移动平台的航向角,即移动平台的速度方向和坐标系x轴的夹角。点B和点A的距离为L,直线BA和平台中轴线的夹角为β,则有
 (2)
(2) 上式两边对t求导得
 (3)
(3) 式中,vx、vy分别为x轴方向速度分量及y轴方向速度分量。根据车轮编码器可测的后轮两轮的角速度,左右轮角速度分别设为ωL和ωR,则存在如下关系
 (4)
(4) 式中,D为左右两轮中间轴长。可得
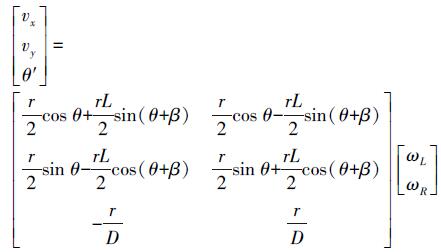 (5)
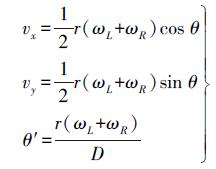
(5) 式中,r移动平台后轮半径。在起始点A处,β=0,L=0,差动运行方程可简化为
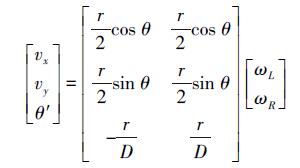 (6)
(6) 因VM=ωMR,故移动平台转弯半径为
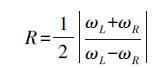 (7)
(7) 当ωL=ωR时,移动平台转弯的角速度为θ′=0,即移动平台沿着直线运动;当ωL=-ωR时,转弯半径为0,表示移动平台此时绕着自身的点A原地旋转运动。
该试验中,需要正确获取两种数据:一是移动平台真实的行走轨迹,即实际轨迹;二是当移动平台行进时左右两轮的线速度。将车轮行走4 m,经过10次试验后,得到一组试验数据,行走距离及定位精度见表 3。10次试验中,最大误差为12 mm,最小误差为2 mm,平均误差为6.8 mm,说明移动平台后两轮在不打滑条件下,直行精度很高。
| mm | ||
| 组数 | 距离 | 误差 |
| 1 | 4004 | 4 |
| 2 | 4006 | 6 |
| 3 | 4011 | 11 |
| 4 | 3998 | -2 |
| 5 | 4007 | 7 |
| 6 | 3990 | -10 |
| 7 | 4002 | 2 |
| 8 | 4009 | 9 |
| 9 | 4012 | 12 |
| 10 | 3995 | -5 |
由于航向角会发生较大变化,会对定位精度造成很大影响,因此需要惯性导航传感器辅助测量轨迹。通过折线行走试验可以验证导航系统应对复杂行走路线的能力。试验首先沿着X轴行走2.5 m,之后沿着Y轴行走 2.5 m,得到的实际轨迹和推算轨迹之间的关系,如图 8所示。

|
| 图 8 折线行走实验曲线 |
试验数据表明,移动平台直线行走过程中出现偏差,但是偏差并不大,因此,需要惯性导航传感器在转弯过程中提高精度。
2.2.3. 两传感器数据融合算法移动平台在复杂的环境中运动时,将编码器所测实时速度及惯性导航传感器测得角度进行数据融合,航迹推算更加精确。在短距离航迹推算过程中,轨迹精度很高,如图 9所示。

|
| 图 9 两传感器数据融合航迹输出 |
差值方法是数值计算中重要的方法,由于地磁场拥有空间波动的特质, 采用克里金数据差值方法[8]效果好、更便捷。它是一种用于空间差值的数据统计方法,是一种求最优、线形、无偏的空间内插方法,根据已经采集的三维地磁数据加权后得到未测量位置的地磁数据。
2.3. 主控模块本文应用Arduino Mega 2560板[9]作为智能移动平台主控模块,自动采集模式下,移动平台上的避障模块采集环境信息,实时调整移动平台姿态,保证能够正常通过障碍区;人工遥控模式下,人为控制移动平台躲避障碍物。因此,在智能移动平台移动过程中,可通过航迹推算模块,获取移动平台的姿态信息及航程信息,并通过串口调试工具计算进一步得到移动平台室内坐标信息。
3、 地磁基准图的输出利用搭载多个HMC5983磁传感器的移动平台进行室内三维地磁数据和二维平面坐标[10]数据采集。
如图 10所示,建筑物结构图为笔者所在学校科研楼一层;等值线图为该建筑物室内总磁场值基准图;图中比例尺单位为纳特(nT)。图中网格部分是数据采集区域,无网格部分经克里金差值算法计算而得。在无网格区域,由于不存在真实值,差值精度不高。圆形区域磁场值明显高于外围磁场,因该处为承重墙,内部钢筋密集,磁干扰强度大。方形区域内,磁场值有明显减弱趋势,该区域存在一个防盗门,使得该区域磁场值骤然减小。这些变化是铁磁性材料所致,因此室内地磁定位标识,可作定位的基准。

|
| 图 10 地磁基准图 |
本文首先研究了地磁场的特性,通过研究地磁场特性,找到地磁室内定位的方法与步骤。结合本文研究的内容,地磁室内定位技术还有很长的路要走,对地磁特性还需要进一步研究,移动平台还需要改善。本文研究成果存在一定的局限性,航迹推算模块精度输出有限,试验场地仅仅局限于小范围的室内走廊,还未能在大范围的室内场地进行地磁基准图构建工作。下一步研究着重放在航迹推算装置上,如何在大测区中输出高精度的二维平面坐标是研究的重点和难点。随着传感技术、惯导技术、智能技术和计算技术等的不断提高,该室内地磁图数据采集平台一定能够在数据采集方面有突飞猛进的飞跃。
| [1] | 许华燕, 李志辉, 王金月. 室内地图应用现状及展望[J]. 测绘通报, 2014 (9) : 119–121. |
| [2] | 张聪聪, 王新珩, 董育宁. 基于地磁场的室内定位和地图构建[J]. 仪器仪表学报, 2015, 36 (1) : 181–186. |
| [3] | VANDERMEULEN D,VERCAUTEREN C,WEYN M,et al. Indoor Localization Using a Magnetic Flux Density Map of a Building[C]//The Third International Conference on Ambient Computing,Applications,Services and Technologies.[S.l.]:International Conference on Ambient, 2013:42-49. https://www.researchgate.net/profile/Maarten_Weyn/publication/259388843_Indoor_localization_Using_a_Magnetic_Flux_Density_Map_of_a_Building/links/0deec52b545eb3d81d000000.pdf?inViewer=true&disableCoverPage=true&origin=publication_detail |
| [4] | 杜小菁, 翟峻仪. 基于MEMS的微型惯性导航技术综述[J]. 飞航导弹, 2014 (9) : 77–81. |
| [5] | 吕志鹏, 伍吉仓. 基于四元数的三维坐标变换解析解的改进[J]. 测绘通报, 2015 (6) : 9–11. |
| [6] | 夏楠, 邱天爽, 李景春, 等. 一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J]. 电子学报, 2013, 41 (1) : 148–152. |
| [7] | 王宾, 马超, 温秉权. Mecanum三轮全向移动平台的设计[J]. 机电工程, 2013, 30 (11) : 1358–1361. |
| [8] | 李俊晓, 李朝奎, 殷智慧. 基于ArcGIS的克里金插值方法及其应用[J]. 测绘通报, 2013 (9) : 87–90. |
| [9] | 程展传.基于Android平台的传感器技术应用研究[D].广州:华南理工大学,2011. http://cdmd.cnki.com.cn/Article/CDMD-10561-1012304723.htm |
| [10] | LEE SM, JUNG J, MYUNG H. Mobile Robot Localization Using Multiple Geomagnetic Field Sensors[M]. [S.l.]: Springer International Publishing, 2014: 119-126. |