


越野条件下的车辆通行分析是路径规划分析中的重要部分,在野外救援、战争环境分析等方面具有重要作用。越野环境下,车辆的通行性能分析存在很大的挑战。首先,地貌属性极其复杂,不同的地貌特征对车辆越野通行的影响不同;其次,同一种地貌特征的不同因子对越野通行车辆产生的影响也不尽相同;并且,由于通行车辆的不同,对越野环境的通行需求也存在很大差异;最后,采用实车实地考察演练耗费重大的人力物力,且实施困难[1]。因此,研究一种针对越野条件下的通行分析方法是十分必要的。
目前,大部分研究都是基于道路的路径规划分析,对越野条件下的车辆通行分析研究较少。传统的处理越野条件下的车辆通行问题是采用正方形格网进行地形量化研究,然而,真实环境的复杂性导致正方形网格不能满足实际的通行分析的需求。随着六角网格研究和基于六角格网地形量化模型构建的发展,本文采用六角格网对地形进行量化处理,更加真实地模拟真实地形环境[2]。
通过六角网格的地形量化研究,将真实的地形特征尽可能完整而准确地反映到六角网格中。针对车辆的越野通行问题,本文通过对越野通行的影响因子进行分类分析研究,建立多因子综合分析模型,最终确定车辆的通行区域和通行等级。
1、 六角格网化地图 1.1. 六角网格特征地图的网格化需要选择合适的多边形,覆盖一个平面的正多边形只能是正三角形、正四边形和正六边形3种[3]。Laurent Condat等[4]指出,在网格具有相同采样密度的情况下,六角网格的逼近质量始终比正四边形网格好。
在研究越野地形环境下车辆通行问题中,正六边形网格的优势[5]有:
(1) 正六边形具有一致的邻近关系。
(2) 正六边形具有更多的等距量度方向。在实际环境中,由于研究对象可以沿任意方向移动,等距方向越多的环境模型越能反映实际环境。
(3) 正六边形具有较高的角分辨率。较高的分辨率有利于提高道路和河流等要素的量化精度。
1.2. 六角网格数据结构矢量地图进行六角网格划分后,每个六角格描述该地形要素的空间信息和属性信息。将研究区域划分成M×N个矩形区域,然后在矩形区域基础上生成六角格网,六角格网的编码格式为[所在矩形格网X编号,所在矩形格网Y编号,六角格网列编号,六角格网行编号],如图 1所示。

|
| 图 1 六角格网的编码格式 |
每一个六角格都是由格元和格边组成的,单个六角格格元和格边对应的数据结构见表 1和表 2。
| 属性 | 表达方式 | 类型 |
| 所在方格网X编号 | RectangleX | 整数型(int) |
| 所在方格网Y编号 | RectangleY | 整数型(int) |
| 六角网格6个顶点的坐标 | HexagonPoint[6] | 浮点型(float) |
| 六角网格的6条边的编码 | HexagonEdge[6] | 整数型(int) |
| 六角网格中心点的X坐标 | HexagonCenterX | 浮点型(float) |
| 六角网格中心点的Y坐标 | HexagonCenterY | 浮点型(float) |
| 六角网格的行索引编码 | HexagonRowIndex | 整数型(int) |
| 六角网格的列索引编码 | HexagonColIndex | 整数型(int) |
| 六角网格的地形类型 | HexagonTerrainType | 字符型(string) |
| 六角网格的高程 | HexagonHeight | 浮点型(float) |
| 六角格网格内陆地交通等级 | HexagonTraffic | 整数型(int) |
| 六角网格气象类型 | HexagonWeatherType | 字符型(float) |
| 属性 | 表达方式 | 类型 |
| 六角网格边起始点的X坐标 | HexagonStartX | 浮点型(float) |
| 六角网格边起始点的Y坐标 | HexagonStartY | 浮点型(float) |
| 六角网格边终点的X坐标 | HexagonEndX | 浮点型(float) |
| 六角网格边终点的Y坐标 | HexagonEndY | 浮点型(float) |
| 六角格网6条边的属性 | HexagonType[6] | 字符型(string) |
| 六角格网的6条边的障碍类型 | HexagonBarrier[6] | 布尔型(bool) |
采用六角格网对地形数据进行量化,目的是将真实地形环境划分为许多面积相等的六角网格单元,然后将该单元内包含的地理环境信息进行综合,并且将这些综合后的信息划分为不同的类别,最后将综合后的信息以属性结构体的方式存储在每个六角网格单元中[7]。目前,矢量地图的数据管理主要是按照分层方式存储的,其分层依据地图制图学中对地图要素的划分[8]。本文中,选取居民地、植被要素(森林和草地)、陆地地貌和土质、水域(河流、海洋和沼泽)及陆地交通(铁路、国道和省道)作为主要研究内容。六角格网属性信息建模过程如图 2所示。
2.1. 道路的量化在研究越野条件下的车辆通行问题时,考虑到车辆在有道路条件下的通行能力更强,因此优先选择道路进行通行。根据不同比例尺数字地形图的分类标准,对道路进行分类分级。车辆在基于六角格网进行移动时,是从一个格网的中心点移动到相邻格网的中心点,因此,不同的道路要素在进行六角格网地形量化时,是根据矢量道路与六角格网格边相交的情况,将道路表达为六角格网中心点到相应6条边的垂距。

|
| 图 2 六角格地形量化流程 |
将研究区域划分为N个正六边形小区域,每一个小区域内的地形类型应该与实际地形类型基本一致[9]。在格元属性信息建模时,主要是面状要素的处理。本文将格元类型划分为居民地、森林、草地、陆地地貌和土质、海洋及沼泽6大类,六角格地形判断的方法依据面积占优法及重要性法进行确定。基本步骤如下:
(1) 计算六角网格内六类面状要素的面积比重ρi,
(2) 比较ρi的大小,ρmax对应的地形类型被认为是该六角格的格元属性,若最大值不止一个,则根据要素的重要性法进一步确定格元的属性,重要性法根据影响车辆越野通行程度而定。
2.3. 格边属性信息建模格边属性信息建模主要是车辆在相邻格网间移动时,确定两个网格公共边的障碍类型,用于分析是否允许车辆通行问题。本文研究的重点是线状要素河流的量化。根据河流与六角格网的相交情况,根据河流的走向,将河流量化到六角格网的6条边上,若有河流通过,格边属性为河流;若没有河流通过,根据该格边相邻的两六角格确定其属性。
根据图层信息对六角格网进行属性信息建模,分别确定格元和格边的属性信息以及道路的量化结果(六角网格边长设置为0.65 km,根据专家经验选择结果)。如图 3所示。

|
| 图 3 六角格网属性信息建模 |
车辆在越野条件下的通行等级根据车辆的通行程度划分为4个等级:易通行地形,能通行地形,难通行地形和不能通行地形。按照通行等级,本文对地表坡度、陆地土质类型、森林的株距、道路等级、沼泽的泥深进行了分类分级研究。
(1) 坡度。根据车辆不同的爬坡能力进行等级划分。坡度的通行分级原则和影响系数见表 3。
其中,α1、α2和α3是根据不同类型车辆的实际经验值来确定的,在此,不针对具体类型车辆进行讨论。
(2) 陆地土质类型。车辆受地表不同土质的作用影响行驶速度。(不考虑有道路的情况)定义一个粗糙度系数δ表示车辆在不同类型地面的通行程度,δi=Vi/V,δ∈[0.1]。其中Vi表示车辆受地面属性影响之后的实际行驶速度,V表示车辆的正常行驶速度。δ越大,说明车辆受该地面类型影响越小,车辆的通行程度越大。粗糙度与通行等级的关系见表 4。
(3) 森林的株距。由于车辆具有一定的宽度、转弯限制等,因此研究车辆在森林中越野通行问题时,要充分考虑森林中树与树之间的距离,是否具备车辆通行的条件,株距对车辆的影响见表 5。
其中,N1、N2、N3根据不同类型车辆的实际经验值来确定。在此,不针对具体类型车辆进行讨论。
(4) 沼泽的泥深。对于轮式车辆而言,沼泽是不能通行区域,而对于履带式车辆而言,沼泽在某些条件下是可以通行的,参照试验数据可知沼泽对履带式车辆的影响见表 6。
(5) 道路的等级。在车辆越野机动时,优先选取道路。此时,影响车辆通行的因素为道路的路面材料、宽度、桥梁的承重能力及涵洞的限制高度等。按照国家划分道路级别的标准,可知道路等级与其通行能力的对应关系见表 7。
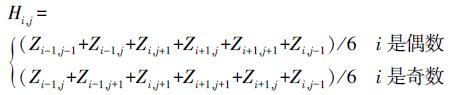
3.2. 越野机动通行性分析模型 3.2.1. 坡度分析坡度是表示地形表面在该点倾斜程度的矢量,由坡度大小和坡度方向组成。在六角格网中,首先通过DEM内插的方法计算出六角网格6个顶点(由西南开始顺时针标记)的高程Zi, j, k,k∈[1,6]。

求得中心点的高程值Hi, j
本文算法引入窗口移动法,以格网的中心点代表该格网单元,计算当前格网与相邻6个格网之间的坡度大小。以i为偶数为例,依次计算相邻6个网格相对于当前网格的坡度大小Gi,j,k,K∈[1,6]。具体计算公式如下
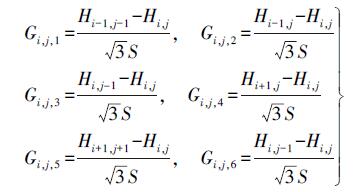
式中,S为六角网格的边长;i为偶数。
建立坡度表,根据不同坡度下车辆通行等级的不同可视化车辆的通行等级区域。以履带式车辆坦克为例,进行区域越野通行范围和通行等级分析。其中,α1=10°,α2=17°,α3=30°。生成坡度等级图,如图 4所示。

|
| 图 4 坡度等级 |
对于居民地要素图层、森林要素图层、草地要素图层、陆地地貌和土质要素图层、海洋要素图层及沼泽要素图层,根据不同车辆的通行等级标准在六角格网中分层可视化通行等级区域,依次对每一个网格进行分级标识,0视为不能通行区域,1视为难通行区域,2视为能通行区域,3视为易通行区域。依次对各图层区域的通行性进行两两叠加,得到要素共同作用下综合分析结果。本文制定格元叠加分析通行性法则见表 8。
| 通行能力 | 易通行 | 能通行 | 难通行 | 不能通行 |
| 易通行 | 易通行 | 能通行 | 难通行 | 不能通行 |
| 能通行 | 能通行 | 能通行 | 难通行 | 不能通行 |
| 难通行 | 难通行 | 难通行 | 不能通行 | 不能通行 |
| 不能通行 | 不能通行 | 不能通行 | 不能通行 | 不能通行 |
根据对陆地地貌及土质层、植被层、水域图层进行六角格网的属性信息建模,以及上述越野机动影响因素不同通行等级的划分,确定图层叠加后的通行区域和通行范围。生成格元通行等级图,如图 5所示。

|
| 图 5 格元通行等级 |
根据上述格边的属性建模可知,格边属性主要是判断其通行障碍等级(0为没有障碍,1为能通行障碍,2为难通行障碍,3为不能通行障碍)。本文认为车辆不具备涉水条件,在判断格边的障碍类型时,首先将河流量化结果与道路量化结果进行叠加分析。叠加分析结果有以下4种情况。
(1) 若某格边有河流通过且有道路,则判断该格边障碍等级根据道路的通行等级确定。
(2) 若某格边只有河流通过没有道路,则判断该格边障碍类型为不能通行。
(3) 若某格边没有河流通过但有道路,则判断该格边障碍等级根据道路的通行等级确定。
(4) 若某格边没有河流通过也没有道路,则根据该格边相邻的两个格元的属性确定其通行等级。若两相邻格元属性一致,则该格边的障碍等级根据格元的通行等级确定;若两相邻格元属性不一致,则该格边的障碍等级根据通行程度小的格元确定。
根据河流和道路的量化结果,确定格边的障碍类型,如图 6所示。

|
| 图 6 格边障碍类型 |
将坡度通行等级分析结果、格元通行等级分析结果及格边障碍等级分析结果叠加进行可视化显示,研究区域最终通行区域和通行等级的可视化结果如图 7所示。

|
| 图 7 最终通行区域等级 |
本文采用六角格网的方法对地形图进行量化,进而研究车辆越野通行区域和通行等级的划分。首先,对六角格网中格元、格边及道路进行属性信息建模,生成了丰富的六角格网信息;然后,对影响车辆越野通行的因素进行了分类分析;最后,制定了多因素影响下车辆越野通行法则并进行了格元和格边的通行分析。根据本文提出的地形量化方法及车辆越野通行法则,最终得出履带式车辆坦克在研究区域的通行等级图。
下一步工作是研究相对详细的多交通工具的影响因素分类体系,以期提高通行性分析结果的准确度。
| [1] | 吴天羿, 许继恒, 刘建永, 等. 基于改进A*算法的越野路径规划研究[J]. 计算机应用研究, 2013, 30 (6) : 1724–1726. |
| [2] | 汤国安, 李发源, 刘学军. 数字高程模型教程[M]. 北京: 科学出版社, 2010. |
| [3] | CONDAT L, VAN D V D, BLU T. Hexagonal Versus Orthogonal Lattices:a New Comparison Using Approximation Theory[J]. ICIP, 2005(3): 1116–1119. |
| [4] | 李坤伟, 武志强, 张欣, 等. 兵器棋盘生成方法研究与实现[J]. 测绘科学技术学报, 2014, 31 (4) : 436–440. |
| [5] | 张欣.兵棋推演系统全球地理环境建模方法研究[D].郑州:信息工程大学,2011. |
| [6] | 杨南征. 虚拟演兵——兵棋、作战模拟与仿真[M]. 北京: 解放军出版社, 2007. |
| [7] | 缪坤, 郭建, 苏旭明. 产生式规则条件下的六角格地形量化方法[J]. 测绘科学技术学报, 2015, 32 (1) : 96–100. |
| [8] | 周成军, 张锦明, 范嘉宾, 等. 训练模拟系统中地形量化模型的探讨[J]. 测绘科学技术学报, 2010, 27 (2) : 149–152. |
| [9] | 王飞, 曹启华. 军事地形分析建模与应用[M]. 北京: 解放军出版社, 2002. |
| [10] | 张文诗. 战场环境分析[M]. 北京: 解放军出版社, 2009. |