


2. 中国测绘科学研究院, 北京 100830;
3. 四川省第一测绘工程院, 四川 成都 610100;
4. 青岛市勘察测绘研究院, 山东 青岛 266000
2. Chinese Academic of Surveying and Mapping, Beijing 100830, China;
3. Sichuan No. 1 Surveying and Mapping Engineering Institute, Chengdu 610100, China;
4. Qingdao Surveying and Mapping Research Institute, Qingdao 266000, China
随着2012年多项北斗应用示范项目的相继启动,中国北斗正在加速发展,作为一种高效快捷的终端定位服务设备,兼容性手持终端迎来了广阔的应用前景,如北斗船载和车载终端的研发、北斗船舶和车辆监控管理运营服务平台在亚太地区的构建等[1-2]。
目前,中国北斗产业的飞速发展离不开高精度的终端定位方法,为提高手持终端定位精度,本文利用网格伪距差分定位方法[3],并采用BDS+GPS双系统组合方式[4-6],实现高精度手持终端定位系统。
1、 网格伪距差分定位原理网格伪距差分定位是基于网格虚拟参考站的伪距差分定位,它是将CORS网所覆盖区域通过一定方法(如单位间隔的经纬线)划分成规则的网格,网格中心点的位置即为虚拟参考站所在位置,利用相应改正数内插模型生成网格中心点伪距改正值,用户需要进行单点定位确定自己所在网格,并利用所在网格伪距改正数,进而实现伪距差分定位。
移动终端网格伪距差分定位的主要技术路线如图 1所示。服务器端需要布设网格改正数生成系统,首先通过IP/端口连接各CORS站,以接收CORS站导航电文和观测数据,进而由改正数生成系统通过算法选择离网格中心点附近的CORS站并进行时间匹配,根据相应的改正数内插模型生成网格改正数信息,然后按照RTCM3.2格式进行编码[7-8],使得改正数实时播发[9];移动终端首先需要进行串口设置来接收实时观测值数据流[10],通过IP/端口设置连接服务器,接收网格差分改正数数据流,将数据流进行解码,然后通过单点定位粗略确定流动站的位置,确定其所在的网格,获取所需网格改正数信息,进而利用改正数信息,实现移动终端实时差分定位服务。

|
| 图 1 网格伪距差分技术路线 |
BDS+GPS双模融合伪距差分定位系统,其空间部分由地球静止轨道卫星(geostationary orbit, GEO)、倾斜地球同步轨道卫星(inclined geosynchronous orbit, IGSO)和中圆地球轨道卫星(medium earth orbit, MEO)3类卫星组成;地面部分是由n个基准站Bi、经纬线划分的等间距规则网格Gk和流动站M组成,其中M位于某一网格G0中,如图 2所示。
基准站Bi到第j颗卫星的伪距观测方程表示为
 (1)
(1) 式中,RBij为基准站Bi至卫星j的伪距观测值;ρBij为基准站Bi至卫星j的几何距离;c为光速;tBi、tj分别为基准站Bi的接收机钟差和卫星j的钟差;δρBiephj, 为卫星星历误差;δρBi, ionj、δρBi, tropj分别为基准站Bi的电离层和对流层折射改正;εBi为随机误差。

|
| 图 2 网格中心点伪距差分定位示意图 |
基准站Bi到卫星j的几何距离ρBij表达式为
 (2)
(2) 式中,(Xj,Yj,Zj)为卫星j发射信号时刻的三维坐标;(XBi,YBi,ZBi)为基准站Bi的已知三维坐标。
基准站Bi对卫星j的伪距改正值δρBij为
 (3)
(3) 式中,dtBi为计算所得接收机钟差;δtBi为剔除钟差后的基准站Bi钟差残差。
通过内插系数ai(i=1, 2,…,n)将网格中心点Gk附近的n个基准站Bi的伪距改正数融合,所得该网格的综合伪距改正值δρGkj可表示为
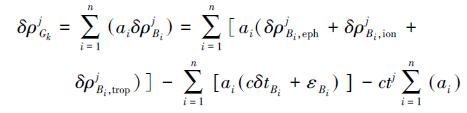 (4)
(4) 式中,ai为基准站Bi伪距改正数的内插系数。这里以反距离权重插值法[11-12]为例进行说明,其数学模型如下
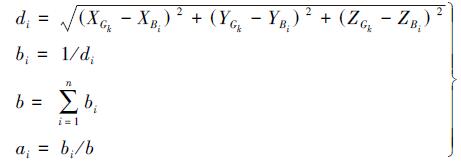 (5)
(5) 由式(5) 可知,ai满足以下条件
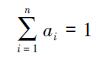 (6)
(6) 由式(4) 、式(6) 可简化网格中心点Gk的综合伪距改正数δρGkj为
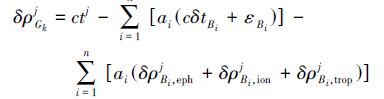 (7)
(7) 流动站M伪距观测方程[13]可表示为
 (8)
(8) 式中,RMj为流动站M至卫星j的伪距观测值;ρMj为流动站M至卫星j的几何距离;c为光速;tM、tj分别为流动站M的接收机钟差和卫星j的钟差;δρM, ephj为卫星星历误差;δρM, ionj、δρM, tropj分别为流动站M的电离层和对流层的折射改正;εM为随机误差。
流动站M进行单点定位粗略确定所在网格,并利用所在网格的中心点的伪距改正数δρGkj修正其伪距观测值RMj为
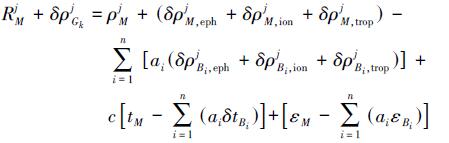 (9)
(9) 式中,消除了流动站M至卫星j的钟差tj。
在一定空间范围内,基准站与流动站的大气误差(电离层、对流层延迟)和卫星星历误差具有空间相关性,通过差分可以大大削弱这些误差[14],即
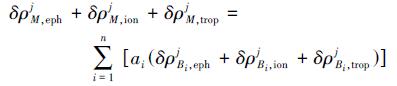 (10)
(10) 而接收机钟差残差和随机误差不存在该空间相关性,因而无法通过空间内插模型进行消除。因此,网格中心点伪距改正数δρMj对移动站伪距观测值ρMj修正结果为
 (11)
(11) 由式(11) 可以直观地看出,利用网格中心点伪距改正数修正的流动站M伪距观测值消除了卫星钟差、卫星星历误差和大气误差,但引入了基准站接收机的钟差和随机误差。
将tM, B(流动站M接收机BDS系统钟差)、tM, G(流动站M接收机GPS系统钟差)和流动站坐标(XM, YM, ZM)设为5个未知参数,利用已修正的伪距观测值构建观测方程。令流动站M的初始概略坐标为(X0, Y0, Z0),对应的改正项为(δx, δy, δz),通过泰勒级数展开对伪距观测方程进行线性化[15],线性化后的误差方程可表示为
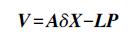 (12)
(12) 式中,P为BDS、GPS系统在融合系统中的权比分配;
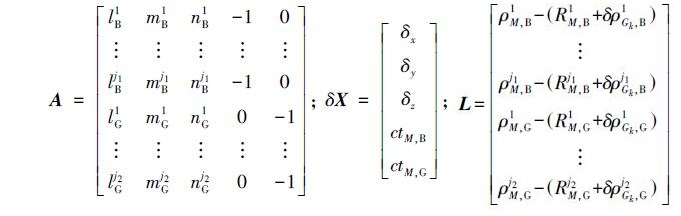
其中, lSjS=(XSjS-X0)/ρSM0jS;mSjS=(YSjS-Y0)/ρSM0jS;nSjS=(ZSjS-Z0)/ρSM0jS为方向余弦;ρSM0jS=[(XSjS-X02+YSjS-Y0)2+(ZSjS-Z0)2]1/2,为卫星jS至流动站M的近似距离;下标S取B/G代表BDS和GPS两种卫星导航系统,对应jS的分别取1≤jB≤j1,1≤jG≤j2表示两种系统的卫星。当共视卫星数多于5颗时,流动站M通过最小二乘法进行定位解算,其公式为
 (13)
(13) 式(13) 通过迭代循环计算,当满足给定的收敛阈值时结束循环,进而求出δX中改正项(δx, δy, δz),即可按
本次试验区域为四川省境内,如图 3所示,利用21个基准站生成网格中心点改正数,网格起始纬度为北纬29°30′,起始经度为东经103°30′,纬度和经度间隔都为0.5°,纬度自北纬29°30′至北纬31°30′,分成4条纬度带,经度自东经103°30′至东经105°30′,分成4条经度带,以此可划分为16个网格。网格编号自左下角开始,按“从左到右、从下到上”原则,依次为1, 2,…,16。

|
| 图 3 网格与基准站位置分布及测试路线 |
车载实时动态伪距差分测试采用零基线方式,将1台接收机天线通过吸顶安放到汽车的顶部,天线通过功分器分流,连接1台Trimble R9接收机和1台华辰CC20手持机。Trimble R9接收机采集原始数据,利用TBC软件进行基线处理,将处理得到的结果用来评定手持机实时伪距差分定位精度。其中,本次跑车线路跨越4个网格,图 3中灰色线段表示本次跑车试验的实际线路。
为了分析手持机实时网格伪距差分定位的精度,将R9采集的数据,使用TBC软件解算后获得的坐标作为准确值;将终端手持机实时差分定位结果每历元以准确坐标为原点建立站心坐标系,求得实时网格伪距差分解算结果N、E和U方向的残差,图 4所示为手持机实时网格伪距差分解算结果N、E和U方向残差的时间序列。
由图 4可以求出N、E和U方向偏差的单位权中误差,从而可以用来反映手持机实时伪距差分定位的精度。实时网格伪距差分定位结果在N、E和U方向偏差的单位权中误差见表 1,解算率统计见表 2。
| m | ||||
| 数据处理方式 | 网格伪距差分 | 水平方向RMS | ||
| N方向 | E方向 | U方向 | ||
| 实时 | 0.401 2 | 0.334 1 | 1.259 0 | 0.522 1 |

|
| 图 4 实时网格伪距差分定位N、E和U方向残差时间序列 |
由表 1可知,手持机实时网格伪距差分定位水平方向的定位精度为0.522 1 m,从一定意义上来说,达到了亚米级精度;在高程方向的定位精度为1.259 0 m,其中高程精度有待提高。
由表 2可知,网格伪距差分定位实时解算率在91.54%左右,具有一定的稳定性,但仍然存在丢包现象,造成丢包现象的原因有以下3个方面:①流动站端接收机由于各方面原因无法接收到卫星信号,因而无法采集观测数据,造成丢包现象发生,如高架桥、广告牌会造成遮挡;②网格差分定位方法是基于CORS网进行试验的,每一历元数据的解算都需要进行基准站匹配和流动站匹配,试验过程中如果有一个基准站观测数据出现问题或CORS网数据传输出现问题,差分定位都将无法进行,从而造成丢包现象发生;③数据处理中心播发的改正数据需要通过无线网络进行数据传输,如果无线网络不通畅,改正数据不能被流动站及时接收和使用,当网络延迟时通常无法及时进行历元匹配而造成丢包现象发生。
3、 结束语在与TBC动态解算结果的外符合精度测试方面,手持机BDS+GPS双模融合系统网格伪距差分定位结果的水平精度为0.522 1 m,在水平方向上可以达到亚米级定位精度,高程精度有待提高;另外,手持机BDS+GPS双模融合网格伪距差分定位实时解算率达到91.54%,具有一定的稳定性。
综上所述,手持机网格伪距差分方法具有相当的精度、稳定性和可靠性。后续需研究的问题包括:一是改进网格改正数的生成和播发;二是进一步提高车载网格伪距差分定位的稳定性和可靠性;三是提高手持机实时网格伪距差分定位的高程精度。
| [1] | 马智伟. 中国北斗卫星导航产业整体发展现状及趋势——《2013-2014年中国北斗导航产业发展蓝皮书》发布[J]. 卫星应用, 2014 (9) : 56–59. |
| [2] | 《卫星应用》编辑部. 2012年中国卫星应用若干重大进展[J]. 卫星应用, 2013 (1) : 16–25. |
| [3] | 陈振, 秘金钟, 王权, 等. BDS/GPS实时动态网络伪距差分定位[J]. 测绘科学, 2015, 40 (12) : 81–85. |
| [4] | 李鹤峰, 秘金钟, 党亚民, 等. 基于CORS的多基准站BDS/GPS融合差分网定位性能分析[J]. 大地测量与地球动力学, 2014, 34 (6) : 81–85. |
| [5] | 高星伟, 过静珺, 程鹏飞, 等. 基于时空系统统一的北斗与GPS融合定位[J]. 测绘学报, 2012, 41 (5) : 743–748. |
| [6] | 向常淦, 张晶晶, 张芯, 等. 兼容北斗系统的多基准站差分定位算法实验分析[J]. 测绘, 2014, 37 (6) : 272–274. |
| [7] | 朱静然,潘树国,孔丽珍. DGPS数据RTCM3.1介绍及编解码方法[C]//第四届中国卫星导航学术年会(CSNC 2013)论文集.武汉:中国卫星导航学术年会,2013. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-WXDH201305001046.htm |
| [8] | 张锋, 郝金明, 李超, 等. 基于RTCM数据格式的虚拟参考站技术算法研究[J]. 测绘, 2007, 30 (1) : 3–6. |
| [9] | 吴晓东, 沈刚, 夏威, 等. 交通行业GNSS差分信息播发技术研究[J]. 全球定位系统, 2015 (1) : 41–46. |
| [10] | 令狐进. 基于CORS系统的移动终端定位关键技术研究[D].重庆:重庆交通大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10618-1013136872.htm |
| [11] | DALE Z, CLAIRE P, AMY R, et al. An Experimental Comparison of Ordinary and Universal Kriging and Inverse Distance Weight[J]. Mathematical Geology, 1999, 31(4): 375–390. DOI:10.1023/A:1007586507433 |
| [12] | 徐忠燕, 张传定. 局域差分GPS改正数学模型分析与比较[J]. 海洋测绘, 2007, 27 (1) : 24–26. |
| [13] | 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2010: 173-180. |
| [14] | 徐周.GPS差分定位技术及实现方法的研究[D].郑州:信息工程大学,2006:32-34. http://cdmd.cnki.com.cn/Article/CDMD-90008-2007051708.htm |
| [15] | 刘琳. BDS/GPS双模差分定位技术的研究及实现[D].北京:北京交通大学, 2013. |