

2. 郑州市交通规划勘察设计 研究院, 河南 郑州 450001
 ,
,
下视阵列SAR系统采用天底观测方式,通过在跨航向上设置阵列天线,利用脉冲压缩技术、合成孔径技术、波束形成技术实现了地物、地貌在高程向、方位向、跨航向的三维分辨[1-2],有效解决了传统SAR体制机底盲区、左右模糊、几何失真等问题。此外无人机测绘系统在低空(云下飞行)、大比例尺成像中灵活、高效、分辨率高等优势[3-4],使得无人机阵列SAR系统的概念一经提出便受到国内外学者的广泛关注。尤其是针对恶劣环境导航、城市测绘、应急测绘等需要快速有效获取高质量影像数据的情况下,该技术具有良好的应用前景。然而下视阵列SAR跨航向维分辨率受限于阵列天线长度,阵列天线越长,跨航向的分辨率越高,所需的阵元数就会越多,阵列天线物理实现的成本和复杂度就会成倍增加。MIMO技术[5]的引入解决了这一难题,根据等效相位中心(equivalent phase center,EPC)原理,可用最少为2n个真实阵元实现个数为n的等效虚拟阵元,从而大大降低了硬件成本和系统复杂度。
近年来,无人机市场的发展如火如荼,仅国内就有很多单位研制无人机。但以无人机平台为依托,MIMO技术和阵列SAR技术相结合的阵列天线设计研究相对较少,大多是以大飞机为基础开展的研究。目前MIMO雷达阵列设计主要有EPC原理和空间卷积原理两种思想。基于前者,德国防务研究院高频物理所提出的ARTINO系统,采用MIMO技术形成了1440个虚拟阵元[6-7];杜磊等提出了一种优化的MIMO下视3D-SAR的阵列天线布阵方式[1];张娟等提出了一种阵元利用率最高的MIMO雷达阵列结构优化算法[8];叶荫等优化了单激励稀疏阵列三维SAR成像系统的天线配置[9];彭学明等构造了跨航向稀疏下视阵列天线构型的MIMO机载3D-SAR系统[10];李云涛等提出了改进的ARTINO天线结构、发射居中紧凑和接收居中紧凑3种天线构形[11];于春艳等提出了一种发射阵元居中,接收阵元置于机翼两端的新型机载MIMO-SAR阵列配置方法[12]。基于后者,粟裕等提出了利用自卷积逆运算求解收发共用阵元位置的方法[13];吴子斌等通过空间卷积逆运算求解出多组MIMO线阵设计方案[14]。然而大飞机平台阵列天线的配置与无人机有本质的区别,无人机普遍偏轻,飞行姿态不平稳,如果采用两端发射中间接收构型,姿态多变和机翼剧烈抖动所造成的图像模糊是无法容忍的。
为了满足无人机大比例尺测图的需要,本文从测绘应用关心的分辨率、高程精度、波段、工作高度等要求出发,依据EPC原理,通过中间发射两端接收的MIMO模型,求解出等效虚拟阵列和实际物理阵列长度,以优化设计无人机平台MIMO下视线阵三维SAR阵元的数目和位置,减弱两端发射中间接收模型所带来的振动误差影响;并根据该天线设计进行仿真试验,通过三维重建场景和原始仿真场景的差分对比,证明本文阵列配置的合理性。
一、 MIMO阵列SAR天线构型本文以交替发射模式研究无人机平台的MIMO阵列SAR天线设计问题。该模式每个脉冲重复时间(pulse repetition time,PRT)内有且只有一个发射阵元发射信号,所有接收阵元同步接收场景回波,直到所有发射阵元依次发射信号后,得到一个阵元间隔相等的均匀等效虚拟阵列。传统的ARTINO系统采用两端发射中间接收的天线构型,发射阵元分布在剧烈震荡的翼尖位置,较大的振动误差严重影响了成像质量,这对于姿态本身就不稳定的无人机平台是无法容忍的。因此,建议无人机平台阵列SAR天线的设计采用中间发射两端接收的构型。
无人机MIMO阵列天线配置有极大的自由度,由一个等效虚拟阵列求解物理收发阵列是一个病态问题,所有给定个数的虚拟阵列都可以通过除了1和本身以外的可分解的两两因数交换相乘得到。以16个等效虚拟阵列为例,可有“4发4收”“2发8收”“8发2收”3种物理阵列实现,其相应的收发阵元及等效相位中心分布分别如图 1—图 3所示。

|
| 图 1 无人机阵列SAR“4发4收”收发阵元示意图 |

|
| 图 2 无人机阵列SAR“2发8收”收发阵元示意图 |

|
| 图 3 无人机阵列SAR“8发2收”收发阵元示意图 |
图中黑色方块代表发射阵元,黑色圆圈代表接收阵元,灰色菱形代表等效相位中心,虚线白色圆圈不代表阵元,仅示意阵元之间的距离。从实际阵列和等效阵列长度指标来看,同样实现15S长度的等效虚拟阵列,则“4发4收”“2发8收”“8发2收”分别消耗了18S、22S和16S长度的实际物理阵列。“4发4收”模式所用的阵列数量最少,“2发8收”模式的实际阵列长度最长,“8发2收”模式的实际阵列长度最短。因此在等效阵元数一定的前提下,收发阵元相等时所需的总阵元数最少,随着发射阵元的减少或增加,总阵元数都会随之增加。
为了得到均匀分布的等效相位中心,将上述中间发射两端接收的思想扩展到一般性,则该构型需满足
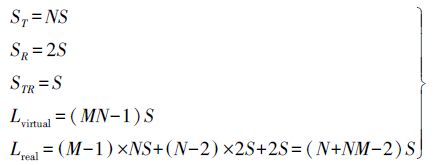 (1)
(1) 式中,ST为发射阵元间距;SR为接收阵元间距;STR为收发阵元间距;Lvirtual为虚拟阵列的长度;Lreal为实际物理阵列的长度;M和N分别为发射阵元和接收阵元的数目。实际物理阵列和等效虚拟阵列的差值如式(2)所示,后面实际MIMO阵列SAR天线配置需要考虑到该差值。
 (2)
(2) MIMO模式阵列SAR天线设计是整个系统物理实现的关键。如图 4所示,首先,根据阵列SAR跨航向理论分辨率尽可能选择较高频率波段,进而在采样定律等约束条件下确定等效虚拟阵元间隔;其次,根据地形测绘对航高和三维地形精度的要求,并结合已确定的波长求解满足大比例尺测图的等效虚拟阵列长度;然后,将等效虚拟阵列长度除以等效虚拟阵元间隔得到阵元总数,利用因式分解方法确定发射阵元和接收阵元的数目;最后,根据设计的阵列确定阵元在实际无人机平台的位置。

|
| 图 4 阵列天线设计流程 |
《基础地理信息三维模型产品规范》[15]对地形精度的要求见表 1,其中,网格间距代表平面精度的约束,高程中误差代表高程精度的约束,下面将以此为依据研究无人机平台MIMO阵列SAR天线的设计问题。
| 成图比例尺 | 网格间距 | 地形类别(平地的 高程中误差) | 地形类别(丘陵的 高程中误差) | 地形类别(山地的 高程中误差) | 地形类别(高山的 高程中误差) |
| 1∶500 | 0.5 | 0.37 | 0.75 | 1.05 | 1.5 |
| 1∶1000 | 1 | 0.37 | 1.05 | 1.5 | 3 |
| 1∶2000 | 2 | 0.75 | 1.05 | 2.25 | 3 |
文献[1]将多发多收收发分置结构的回波信号转化为收发共用,得到MIMO模式下视阵列SAR的跨航向分辨率为
 (3)
(3) 式中,λ为波长;H为平台飞行高度;L为虚拟阵列的合成孔径长度。因此,为了获得较高的跨航向分辨率,要求系统应选择较高频率的波段和低空飞行,而且尽可能使阵列长度增长。从另一方面也表明了该技术局限于低空测绘,适用于大比例尺测图。无人机平台以其低空飞行、采集的影像分辨率高等特点成为该技术载体的不二之选。
目前,国内外无人机市场方兴未艾,产品众多。我国测绘生产中具有代表性的固定翼轻型无人机飞行平台有国遥万维Quickeye无人机航摄系统、南方数码SUF30飞雁测绘遥感无人机系统、中航工业“鹞鹰”民用无人机、武汉智能鸟无人机等。其飞机的翼展、载荷参数见表 2。翼展直接限制着等效虚拟阵列的最大长度,载荷则决定着飞机允许的最大阵元数。
借鉴光学航空摄影的经验,飞行高度由像元大小、焦距、分辨率决定。1∶500、1∶1000、1∶2000地形图成图时,根据所选用的相机焦距不同,相对航高大致为600 m、700 m、1500 m左右。分别将该参考航高和表 1中对应的三维地形精度代入式(3),可得
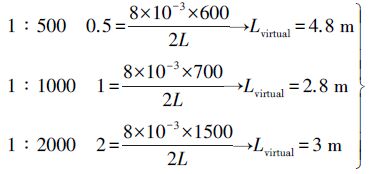 (4)
(4) 因此,无人机阵列SAR技术建议用类似“鹞鹰”这种长翼展无人机作为平台较好。为了满足所有大比例测图任务,虚拟阵列长度取最大值4.8 m,则所需阵元个数为
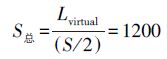 (5)
(5) 根据其除了1和本身以外的两两因数,1200个虚拟阵元可有28种收发组合。以最大限度减小阵元数量和实际阵列长度为原则,本文选取40发30收的收发组合。该收发组合用了最少的发射阵元和最小的实际阵列长度实现了大比例尺测图所需的等效阵列长度。该收发组合的实际阵列长度为
 (6)
(6) 因此,为了满足相应大比例尺的测图需求,建议选择翼展长度至少为4.916 m的无人机,将40个发射阵元和30个接收阵元对称安置,中间为发射阵元yT,两端为接收阵元yR,其位置如式(7)所示
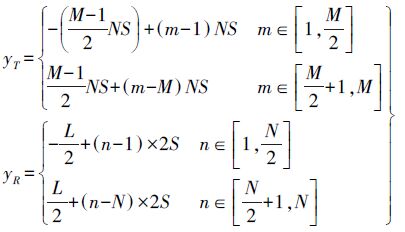 (7)
(7) 式中,L=4.916 m;M=30;N=40;m和n分别代表第几个发射和接收阵元。
三、 试 验本文基于中间发射两端接收的MIMO模式,采用40发30收的阵列配置,以600 m相对航高、100 m/s平台速度为基础,仿真了无人机下视三维建筑物场景的回波数据,并利用三维距离-多普勒算法进行了成像处理。其他试验仿真参数见表 3。
图 5给出了原始仿真场景,在200×200 m的范围内仿真2栋高度为30 m的楼房,一栋L型楼房在飞行航线左侧,另一栋楼房在飞行航线右侧,三维成像处理后重建的场景点云经平面拟合后如图 6所示。由成像结果可以看出,利用三维距离-多普勒算法重建的2栋楼房对原始仿真场景进行了较好的恢复,证明了本文阵列设计的合理性。

|
| 图 5 原始仿真场景 |

|
| 图 6 三维重建场景 |
为了进一步评价重建结果的优劣,将原始仿真场景和三维重建场景作差值处理得到仿真成像差分对比图。如图 7所示,图中白色部分表示重建场景低于原始场景,黑色部分表示重建场景高于原始场景,由此可以发现建筑物的轮廓能够较准确地得到,这表明三维重建的3栋楼房的高程在建筑物内部较准确,但在建筑物边缘区域差异较大。究其原因,除了成像算法的优劣之外,也包括阴影区域的计算不准、未对成像点云进行滤波优化等因素。

|
| 图 7 仿真成像差分对比 |
本文基于无人机平台将MIMO技术和阵列SAR技术相结合,采用中间发射两端接收的MIMO构型,依据EPC原理,求解出满足大比例尺测图需要的等效虚拟阵列和实际物理阵列长度,优化设计了无人机平台MIMO下视线阵三维SAR阵元的数目和位置。仿真试验证明了该阵列设计的合理性。
后续研究中,还需进一步考虑方位向分辨率、高程向分辨率对全阵尺寸及阵元数目的影响; 进一步验证该方案高程反演的精度,为复杂的MIMO模式阵列天线设计的病态问题提供一种解决思路和策略。
| [1] | 杜磊. 阵列天线下视合成孔径雷达三维成像模型、方法与实验研究[D]. 北京:中国科学院电子学研究所, 2010:1-164. |
| [2] | 李道京, 侯颖妮, 滕秀敏, 等. 稀疏阵列天线雷达技术及其应用[M]. 北京: 科学出版社 ,2014 . |
| [3] | 王京卫. 测绘无人机低空数字航摄影像去雾霾研究[J]. 测绘学报 , 2016, 45 (3) : 251–257. |
| [4] | 毕凯, 李英成, 丁晓波, 等. 轻小型无人机航摄技术现状及发展趋势[J]. 测绘通报 , 2015 (3) : 27–31. |
| [5] | ENDER J H G. Along-track Array Processing for MIMO-SAR/MTI[C]//7th European Conference on Synthetic Aperture Radar. Friedrichshafen:EUSAR Committee, 2008. |
| [6] | WEIB M, ENDER J H G. A 3D Imaging Radar for Small Unmanned Airplanes-ARTINO[C]//European Radar Conference 2005. Paris:European Microwave Association, 2005. |
| [7] | KLARE J. A New Airborne Radar for 3D Imaging-simulation Study of ARTINO[C]//6th European Conference on Synthetic Aperture Radar. Dresden:EUSAR Committee, 2006. |
| [8] | 张娟, 张林让, 刘楠. 阵元利用率最高的MIMO雷达阵列结构优化算法[J]. 西安电子科技大学(自然科学版) , 2010, 37 (1) : 86–90. |
| [9] | 叶荫, 刘光炎, 孟喆. 机载下视稀疏阵列三维SAR系统及成像[J]. 中国电子科学研究院学报 , 2011, 6 (1) : 96–100. |
| [10] | 彭学明, 王彦平, 谭维贤, 等. 基于跨航向稀疏阵列的机载下视MIMO 3D-SAR三维成像算法[J]. 电子与信息学报 , 2012, 34 (4) : 943–949. |
| [11] | 李云涛, 陈永光, 邓云凯, 等. 机载MIMO-SAR线性阵列天线配置研究[J]. 现代雷达 , 2012, 34 (2) : 4–7. |
| [12] | 于春艳, 谢亚楠, 赵海兰, 等. 基于新型阵列配置的机载MIMO-SAR下视三维成像性能研究[J]. 电子测量技术 , 2014, 37 (2) : 64–69. |
| [13] | 粟毅, 朱宇涛, 郁文贤, 等. 多通道雷达天线阵列的设计理论与算法[J]. 中国科学(信息科学) , 2010, 40 (10) : 1372–1383. |
| [14] | 吴子斌, 朱宇涛, 粟毅, 等. 用于机载线阵三维SAR成像的MIMO阵列构型设计[J]. 电子与信息学报 , 2012, 35 (11) : 2672–2677. |
| [15] | 国家测绘局. 基础地理信息三维模型产品规范(征求意见稿):CH/Z[S]. 北京:测绘出版社, 2012. |