

2. 中国电子科技集团公司第五十四研究所,河北 石家庄 050081
 , , , ,
, , , ,
一、引 言
高分一号自投入使用以来,在土地利用变更调查、地质灾害监测、生态环境监测、耕地数量调查、农业设施分布调查等方面发挥着越来越重要的作用。首批高分影像数据包括2m全色、8m多光谱、2m全色8m多光谱融合、16m多光谱4类。
卫星在获取影像时,很容易受到拍摄地区天气状况的影响,其中云区对地物的遮挡直接影像拍摄影像的可用性。云区遮挡地物信息不仅造成采集信息的缺失,而且给影像后续的使用带来极大干扰,直接影响地物的分类、目标的检测、地物的识别等。影像数据接收后,对其进行质量检测,识别其被云影响的区域范围,有很大实用价值。高分影像数据量巨大,如果质量检测完全依赖人工操作,将消耗大量人力和时间。云自动检测算法自动对影像中的云区进行检测,筛选排除被云高度污染的影像,将极大地减少人工操作,提高效率。
二、研究背景介绍
云主要由空气中的水汽凝结而成,云中粒子直径远大于太阳入射波长,对可见光无选择性反射及散射,即红、绿和蓝光的反射量相同,散射量也相同。因此在可见光波段中,云色调较亮呈现白色或灰白色,反射率接近1。
目前有大量云检测算法被提出。Cao等[1]利用积分法对高分辨率影像进行自动云检测;Smith等[2]利用天顶角和云透射率结合阈值分割云区;Souza-echer等[3]在HIS颜色空间中利用平行六面体法识别云区;杨俊等[4]利用插值法获取局部阈值来识别云区; 曹琼等[5]分析图像的纹理特征进行云区的提取。目前的云检测算法主要是针对国外卫星(Landsat、MODIS、NOAA等)影像进行处理。国内高分影像数据近期才发布,针对其影像数据的云检测算法研究较少,并且空间分辨率、波谱参数不同,算法处理也不相同。本文算法主要针对国内高分多光谱影像数据进行自动云检测。GF-1卫星有效光谱参数见表 1。
| 2m分辨率全色/8m 分辨率多光谱相机 | 16m分辨率多 光谱相机 | |
| 全色 | 0.45~0.90 | |
| 0.45~0.52 | 0.45~0.52 | |
| 多光谱 | 0.52~0.59 | 0.52~0.59 |
| 0.63~0.69 | 0.63~0.69 | |
| 0.77~0.89 | 0.77~0.89 |
算法的整体处理流程如图 1所示。对于待检测的高分影像数据,首先利用meanshift算法[7]对其进行分块预处理,以每个分割块作为基本处理单元,利用色度过滤法去除彩色区域,利用半逆法识别可信云区,再扩延识别出薄云区域。
 |
| 图 1 半逆法自动云检测流程 |
图像分割作为云检测预处理,合并相邻的相似像元,分离相异像元。相比于影像中单个像素,分割出的区域具有相同或相似的光谱及纹理特性。本文采用meanshift算法对图像进行分块处理。meanshift算法通过不断迭代偏移均值,将相似像素进行聚类合并。分割算法中最小分割区域的设置可以去除掉孤立的高亮像素点,提高算法的稳定性及鲁棒性。图 2(a)为输入的高分影像;图 2(b)为其对应的分割影像,每个分割块的颜色值是区块内像素点的颜色值平均值。
 |
| 图 2 CIE Lab色度过滤 |
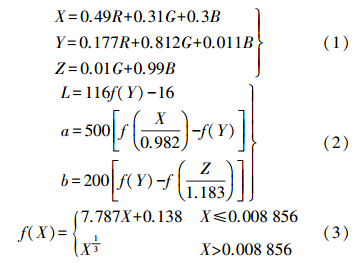
将分块的高分影像(图 2(b))由RGB颜色空间映射到CIE Lab 颜色空间。CIE Lab颜色空间为均匀颜色空间,视觉感知距离与颜色空间中点的距离成比例。其中,L代表亮度; a正值代表红色,负值代表绿色;b正值代表黄色,负值代表蓝色。CIE Lab颜色空间中的3个坐标是相互独立的。色度度量a,b绝对值的大小,度量了颜色偏移白色或灰白色的距离。从RGB颜色空间到CIE Lab颜色空间的变换公式如下
对每一个分割块Ct,求其平均颜色(Rct,Gct,Bct),计算其在CIE Lab颜色空间中对应值Lct,act,bct。 度量色度偏移量 度量了该区块颜色距离灰白色或白色的距离。
度量了该区块颜色距离灰白色或白色的距离。
图 2(c)显示了映射的强度分量,图 2(d)、(e)对a、b取绝对值,并映射到[0,255]进行显示。图 2(d)、(e)显示每个分割块的色度跟强度大小无关,真实地反映了色彩强度。 图 2(f)为色度过滤生成的可疑云区掩码图,在算法处理中,掩码图生成的判断标准为Dct<10。生成的掩码图覆盖了图像中表现接近灰色或白色的区域,过滤了山区植被区,缩小后续云区识别的范围。
3. 半逆法识别
笔者受He等工作[8]的启发,并分析了大量含云高分多光谱影像数据,发现在云区中,每个像素点的每一个颜色通道都有较高值,而非云区中,像素分布满足暗点原理,即每个像素点的周围都会包含暗点像素,即其至少在某一个颜色通道上有很小值(r、g或b),接近于0,具体原理细节可参考文献[8]。Ancuti等[9]进一步延伸暗点原理,提出了像素半逆法,用于雾效去除。 经过大量高分多光谱影像的测试发现,半逆法在检测云区方面也有较好效果,云区内每个像素点各通道值均较大,进行半逆处理,仍得到原始值,而对于在某一个通道上有较低值的像素点,进行半逆处理后,色度有很大变化。
对于每一个分块区域Ct,计算器平均颜色Rct,Gct,Bct的半逆值为
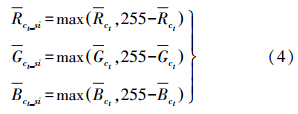
即取每一个通道的原始值及反转值的较大值,图 3(a)为图 2(b)进行半逆操作后的结果。由式(4)可知,对于非云区像素,因其3个颜色通道中有至少有1个通道值较低,进行半逆处理后该较低值会被其取反的值取代,色度信息发生大的变化。 度量每个分割块原始值Rct,Gsub>ct,Bct与对应半逆值Rct_si,Gct_si,Bct_si的色度差异,可对云区进行检测提取。将其同时映射到CIE Lab颜色空间,度量色度差异 ,结果如图 3(b)所示。云区过滤标准为Dct_si<10,过滤结果如图 3(c)所示。
,结果如图 3(b)所示。云区过滤标准为Dct_si<10,过滤结果如图 3(c)所示。
 |
| 图 3 半逆法提取云区 |
半逆法检测了高亮显示的云区,色度过滤排除了色彩明显的地物的干扰。从高亮云区向周围扩延,进一步对薄云区进行检测。如图 4(a)所示,从半逆法检测的高亮云区开始,基于色度过滤产生的掩码(图 2(f)),向周边迭代遍历检测薄云区。 遍历范围为图 2(f)对应的掩码区域,在每个分割块周围临域寻找薄云区域,并迭代进行。采用阈值法对薄云区进行判别,RGB颜色通道的最小值大于90。 该判断基于暗点原理,即非云区在某一个通道上值较小,接近于0。在扩延过程中考虑近红外波段的影响(近红外波段为0.77~0.89μm),植被叶片结构产生的多重反射,导致其反射率较高,通常用于识别植被覆盖。扩延中如果近红外的值大于RGB通道的最小值,即停止外扩。检测结果如图 4(b)所示。
 |
| 图 4 薄云区检测 |
检测结果图 4(b)所示,不仅检测了影像中的高亮云区,对其周围的薄云区也有较好检测结果。半逆法及薄云区检测策略的使用使算法排除了城区对薄云区检测的干扰,实现了鲁棒的云检测效果。图 5列出了其他一些检测结果。图 5(a)为原始高分影像,图 5(b)为检测结果图。为更好地显示检测结果,在检测结果图中添加了一个半透明的白色图层,用于标识检测到的云区。在图像分割中,使用同一组参数对原始影像进行分块预处理。在色度过滤中,阈值统一设置为10,该阈值的选择考虑了云区颜色可能出现的色偏现象,提高了算法的适用性。半逆法中,阈值也统一设置为10,对云区的颜色偏移,也有一定的适应性。而薄云区阈值的选择,是作了大量测试得出的经验值。但大量试验证明,检测效果很好。对于大小为4500像素×4548像素的多光谱影像,算法处理时间在10s以内。该时间主要消耗在对影像的分割预处理上,有待改近。算法的处理时间相对于人工检测云覆盖,已经大大减少了。人工检测涉及打开影像、查看、量算云区面积,整个工作流程繁琐,耗时,还易出现漏查的情况。相对人工检测,自动云检测提供了效率更高的选择。
 |
| 图 5 检测结果 |
色度过滤法及半逆法的结合,实现了对高分影像数据的自动云区检测。检测算法可以较好地排除城区对薄云区检测的干扰。算法目前还达不到实时检测的程度,瓶颈在分割预处理,笔者正在寻找更快速的分割算法对其进行替代,以实现对高分影像的实时自动云检测处理。
| [1] | MAYER H,LAPTEV I, BAUMGARTNER A,et al.Automatic Road Extraction Based Multi-scale Modeling, Context, and Snakes[J].International Archives of Photogrammetry and Remote Sensing, 1997(30):106-113. |
| [2] | TANG Wei,ZHAO Shuhe.Road Extraction in Quaternion Space from High Spatial Resolution Remote Sensed Images Basing on GVF Snake Model[J].Journal of Remote Sensing, 2011,15(5):1040-1052. |
| [3] | GRUEN A, LI H. Semi-automatic Linear Feature Extraction by Dynamic Programming and LSB-Snakes[J].Photogrammetric Engineering and Remote Sensing. 1997,63(8):985-995. |
| [4] | Gruen A, Adaptive Least Squares Correlation——A Powerful Image Matching Technique [J]. South African Journal of Photogrammetry, Remote Sensing and Cartography, 1985,14(3):175-187. |
| [5] | LU Bibo, KU Yongxia, WANG Hui.Automatic Road Extraction Method Based on Level Set an Shape Analysis[C]//lntelligent Computation Technology and Automation, Second International Conference. Changsha:[s.n.], 2009:500-514. |
| [6] | POZ A, VALE G.Dynamic Programming Approach for Semi-automated Road Extraction from Medium and High Resolution Images[J].International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2003, 34(8):87-91. |
| [7] | LIN Xiangguo,ZHANG Jixian,ZHENG Jun,et al.Semiautomatic Road Tracking by Template Matching and Distance Transform[C]//Urban Remote Sensing Event.Shanghai:[s.n.], 2009:l-7. |
| [8] | 胡进刚, 张晓东, 沈欣, 等. 一种面向对象的高分辨率影像道路提取方法[J]. 遥感技术与应用, 2006, 21(3):184-188. |
| [9] | GROTE A, BUTENUTH M, HEIPKE C. Road Extraction in Suburban Aeas Based on Normalized Cuts[C]//International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences.Munich:[s.n.], 2007:51-56. |
| [10] | 李晓峰, 张树清, 韩富伟, 等.基于多重信息融合的高分辨率遥感影像道路信息提取[J].测绘学报, 2008, 37(2):178-184. |
| [11] | 朱晓铃, 邬群勇.基于高分辨率遥感影像的城市道路提取方法研究[J].资源环境与工程, 2009, 23(3):296-299. |