



一方面,随着矿区工业化、机械化、信息化的突破变革,采矿工程系统日益庞大复杂。另一方面,矿山道路环境复杂,极易引发车辆碰撞及侧翻事故,且矿区偏远封闭,调度通信设备落后,生产作业效率低下。因此,矿车生产作业和安全保障面临着巨大挑战,亟需高效、安全、智能的运输解决方案。
伴随着人工智能、传感检测等高新技术的不断突破,无人驾驶技术成为当前汽车领域的研究热点[1]。其智能感知和控制技术能够实现矿用运输车辆无人运输作业[2-5]。同时,矿用运输车辆运行路线固定、且矿区道路封闭,为无人驾驶技术提供更有利的实施空间。因此,矿用运输车辆无人驾驶受到了越来越多的科研机构及相关企业的关注。
目前,国外主要有5家大型矿用汽车制造商,包括卡特彼勒、小松、利勃海尔、日立建机和别拉斯[6]。其中小松是第一个在采矿行业将自动运输系统商行化的制造商,其自动运输系统(Autonomous Haulage System,AHS)是一个综合性的矿山车队管理系统,通过在矿用卡车装载高精度GPS、障碍物检测系统、控制器以及无线网络系统实现了无人装载、运输和卸载循环的自动化运行。力拓在西澳大利亚West Angela铁矿对日本小松无人操作运输系统进行了试验,汽车由离矿区1500km的操作中心控制,取得了较好的效果。在安全保障和效率提高2个关键目标的推动下,卡特彼勒于20世纪80年代便开始了自动化矿卡的研发,通过集成车队、地形、检测与控制指令,开发出了最新型的Minestar驾驶系统,实现有效载重为240t的矿卡无人化操作。而在国内,矿用卡车制造企业虽然已经达到了14家[7],包括内蒙古北方重型汽车股份有限公司、秦皇岛天业通联重工股份有限公司、三一集团有限公司、中国重型汽车集团有限公司、郑州宇通重工有限公司、陕西同力电气有限公司、泰安航天特种车有限公司等制造商,都已试制出无人矿车或宽体改装车。其中内蒙古北方重工业集团有限公司172t无人驾驶电动轮矿车在包钢集团针对矿山现场作业流程进行了测试;数字矿山装备企业以实现采矿效率的最优化为目标,很早之前就开始着手研制无人驾驶系统,以解决轨迹运行不可控的问题。但各研发单位对无人驾驶技术的侧重点不同,导致矿区无人驾驶落地规模应用困难。
无人驾驶矿用运输车辆的关键技术主要包括智能感知技术和车辆控制技术。其中,智能感知设备主要包括相机、激光雷达和毫米波雷达,国内外研究者们提出了许多城市道路环境下的障碍物检测及识别方法,主要包括基于单一传感器的方法[8-10]、基于视觉和激光雷达信息融合的方法[11-13]。但矿区作业光线较暗,夜晚车辆交互作业时易出现增光、补光等光线突变现象,并且车辆行驶过程中前方常存在大量灰尘,基于视觉的方法难以适应矿区车辆运行环境;单一激光雷达会将灰尘作为检测目标而造成较高的误识别。在轨迹跟踪控制技术研究方面,目前使用最多的算法主要包括预瞄控制方法[14]、模型预测控制算法[15]、线性二次型调节器(Linear Quadratic Regulator,LQR)跟踪算法[16]等,但这些算法设计是基于城市道路环境下运行的车辆,且主要采用位置偏差进行跟踪控制。而矿区实际环境恶劣、地面附着条件较低、道路弯曲程度较大,横向和纵向的联合控制是必然要求。
为了提高矿区生产作业的高效性和安全性,促进无人驾驶矿用运输车辆产业化发展,本文结合国内矿山实际运输环境,对无人驾驶环境感知和轨迹跟踪等关键技术进行研究。设计矿区环境下的道路、车辆以及其他障碍物识别算法,并基于预瞄-跟踪实现车辆横向和纵向自主联合控制,最终形成矿区运输车辆的无人驾驶系统体系,加快矿用运输车辆向完全无人化的演进步伐。
1 矿区无人驾驶运输车辆系统设计如图 1所示,在矿区工作环境下,无人驾驶矿用运输车辆利用感知设备实时采集周围环境信息,并利用感知模块依次进行激光雷达和毫米波雷达联合标定、数据关联以及信息融合,最终实现前方道路可行驶区域检测以及周围障碍物信息识别,并将感知结果发送至规划控制模块。结合矿用运输车辆动力学特性,规划控制模块利用路径跟踪技术进行车辆横向和纵向运输状态控制,从而实现车辆在可行驶区域内的安全行驶。

|
| 图 1 矿用运输车辆无人驾驶研究技术路线 Fig. 1 Technical research route of driverless technology for mining vehicles |
本文选取毫米波雷达和激光雷达2种感知传感器搭建无人驾矿用运输车辆障碍物检测系统。
面对矿区复杂多变的天气条件及矿尘飞扬的环境条件,低成本传感器检测精确度及鲁棒性是无法应对的,激光雷达、毫米波雷达等传感器是保证无人矿车安全运行的必备需求。此外,由于矿区的行驶环境与城市道路行驶环境有着很大的区别,在矿用运输车辆的行驶过程中,除了会遇到车辆和行人之外,还会遇到各种石块和坑洼,同样会影响车辆的行驶安全。单一传感器很难满足矿区无人驾驶环境的高精度、实时性的要求。激光雷达具备探测距离远、检测精度高的优势,但无法适应雨雪雾霾天气及-40℃低温环境,因此需要对激光雷达进行严格选型;毫米波雷达可穿透灰尘、可全天候工作且不受天气影响,但检测精度不够高。因此,本文对两者进行优势互补,在单传感器检测的基础上提出基于毫米波雷达和激光雷达融合的多目标检测方法。在传感器工作时,采用固定目标对每个传感器进行校准,运行过程中采用多传感器冗余控制,如障碍物位置采用毫米波和多线激光雷达共同获取,道路边缘采用单线激光雷达和多线激光雷达共同获取。
2.1.1 毫米波雷达和激光雷达联合标定毫米波雷达和激光雷达的联合标定是信息融合的基础,能够将两者测量数据从异步状态转换到同步状态,使它们保持时间统一和空间统一。其中,时间统一是从2种传感器的采样速率中选取较大的采样速率为基准,大采样速率传感器每采集1Hz数据,选取小采样速率传感器上1Hz缓存的数据进行匹配,从而实现2种传感器在时间上同步采集数据;而空间统一是建立精确的毫米波雷达坐标系、激光雷达坐标系和三维世界坐标系之间的坐标转换关系,将2种传感器坐标的测量值转换到同一坐标系中,以实现多传感器数据在空间中的匹配。
2.1.2 数据关联数据关联是整个多目标检测跟踪系统中的核心问题,需要建立传感器所获得的目标测量数据与历史测量数据间的距离关系,以进行目标匹配。由于马氏距离表示数据的协方差距离,可以同时兼顾目标横向距离和纵向距离,且不受测量单位干扰,因此本文选取马氏距离ds进行数据关联。利用马氏距离得到评判式为

|
(1) |
式中:z1(k)为当前k状态下传感器观测值;z′k|k-1为当前k状态下根据k-1状态观测值推算出的预测值;S-1为2个样本的协方差矩阵。
根据Bar-shalom和Fortmann[7]提出的Gating方法确定预测值和观测值的马氏距离阈值c,以判断观测值是否为预测目标,即

|
(2) |
当观测值满足上述马氏距离阈值条件Vk,则认为观测值是有效的。据统计,当c=3时, 观测值在有效区域内的概率为99%。
2.1.3 基于联合概率数据关联的数据融合算法在本研究中,由于每个目标(行人或车辆)最终都具有一个有效的观测值;各目标之前的存在和运行都是相互独立无关联的;同时状态方程和观测模型所产生的高斯白噪声均能满足高斯分布。因此,本文选取基于卡尔曼滤波的联合概率数据关联(Joint Probabilistic Data Association,JPDA)算法进行毫米波雷达和激光雷达的数据融合,如图 2所示。

|
| 图 2 JPDA算法流程图 Fig. 2 Flowchart of JPDA algorithm |
如图 2所示,JPDA算法的状态估计原理同卡尔曼滤波基本一致,通过前一状态传感器的估计值给出当前状态的预测值,同时通过当前测量值匹配后实现观测值的更新,通过卡尔曼增益完成当前目标的状态更新。具体算法流程如下:
根据研究对象给出系统的状态方程为

|
(3) |
式中:xi, k表示第k次状态下,第i个目标的状态向量;vk为平均值是0的高斯白噪声;Fk为系统参数向量,其协方差矩阵为Qk=E(vkvkT); n为观测标数。
本文融合感知系统只有毫米波雷达和激光雷达2个传感器,因此每个目标最多只有2个观测值,则观测值和真实状态的关系为zij, k=Hjxi, k+wj, k, j=1, 2,其中zij, k表示第i个目标在k时刻被第j个传感器检测并输出的观测值;Hj为转化矩阵;wj, k为高斯白噪声,平均值也是0,其协方差满足E(wj, kwj, kT)=Rj,与传感器类型有关。
利用k-1时刻的状态值,使用卡尔曼滤波对上一步状态值和观测值进行预测得
|
(4) |
则本周期(k时刻)的状态更新为

|
(5) |
式中:x′ij, k表示第i个目标根据第j个传感器输出的观测值状态更新后的值;Kij为本系统的卡尔曼增益矩阵。
更新预测值与观测值的协方差矩阵为

|
(6) |
更新卡尔曼增益矩阵:

|
(7) |
对估计值进行更新,采用加权平均法融合毫米波雷达和激光雷达:
|
(8) |
式中:βij为第i个目标产生的第j个传感器观测值的概率。则状态协方差更新如式(9)所示:

|
(9) |
式中:ηij为假设偏差,定义为

|
(10) |
进行βij的求解,按照泊松分布理论得到

|
(11) |
式中:γij=zij, k-z′k|k-1为观测值和预测值的残差向量。
2.2 基于预瞄的路径跟踪控制 2.2.1 路径预瞄跟踪设计为了使得无人驾驶矿用运输车辆沿矿区内固定路径行驶,保证车辆轨迹跟踪的距离误差尽可能小,提出一种用于无人驾驶矿用运输车辆的路径跟踪技术,具体步骤如下:
1) 将规划好的期望路径轨迹点存放在轨迹跟踪器以及方向、速度控制器中。车辆规划轨迹的路径点具体包括路径点的横纵坐标,曲线弧长以及车辆纵向期望车速,其中路径点的坐标是位于绝对坐标系中的坐标。
2) 通过无人驾驶矿用运输车辆的环境感知系统和车速实时检测系统,将车辆当前状态信息发送给路径跟踪器和纵向、横向控制器进行相应规划。
3) 基于无人驾驶矿用运输车辆的实时坐标,依照车辆实时行驶方向,向前方预瞄距离d,并确定预瞄得到的坐标点(Xp, Yp):
|
(12) |
式中:(X0, Y0)为在绝对坐标系下的车辆当前位置坐标;θ0为绝对坐标系下的车辆与当前的道路切向角。
4) 根据预瞄得到的位置坐标(Xp, Yp)与步骤1)中的规划轨迹进行相似性确定,包括预瞄点相对于期望轨迹的横向位置偏差、当前车辆行驶方向与规划路径的角度偏差以及车辆实时车速与期望车速的偏差。
5) 路径跟踪以及方向、速度控制器采用PID控制,通过计算坐标偏差和方向偏差联合控制车辆纵向和横向运动。
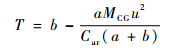
2.2.2 纵向运动控制纵向运动控制主要是通过纵向速度跟随控制来实现,为了保证行驶过程的平稳,车辆按照固定加速度去控制车辆的速度。参照预瞄跟踪技术,假设车辆从起始点以固定加速度运动到预瞄点,轨迹点上离车辆最近的点的坐标为(x1, y1, s1, vx, 1),预瞄点处的期望状态为(x2, y2, s2, vx, 2),根据匀加速运动公式,则获得车辆的参考加速度aref:
|
(13) |
根据驾驶员经验,参考加速度范围应限制在-4~2m/s2。
考虑到矿山作业过程中车辆经常会出现上坡、下坡以及负载变化,对此引入速度误差反馈。通过对比期望车速与实际车速得到车速误差,随后在速度控制器中得到期望加速度,通过感知车辆实际加速度,计算加速度误差,根据误差添加纵向力补偿,从而实施加速或减速策略。为减少建模等噪声的影响,执行过程中添加了低通滤波单元来增加控制的精度。纵向控制系统流程如图 3所示。

|
| 图 3 纵向控制方案 Fig. 3 Longitudinal control scheme |
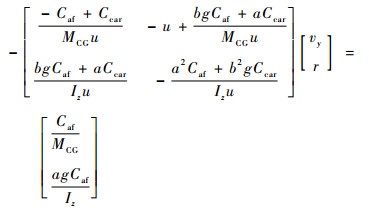
由于矿山运输车辆在作业过程中,车速几乎不变且车速相对较低,因此可以采用阿克曼运动模型分析车辆横向运动。图 4显示为车辆沿曲率半径为R的期望圆弧行驶的情况,o为预瞄误差;预瞄点到曲线中心的距离为h;假设车辆沿着期望路径稳定行驶,误差为0,则此时
|
(14) |

|
| 图 4 车辆圆周运动示意图 Fig. 4 Schematic diagram of circular motion of vehicle |
式中:Iz为车辆绕z轴的转动惯量; a、b分别为车辆前轴轴距以及后轴轴距; MCG为整车装备总质量; u为车辆纵向车速; Caf、Ccar分别为前、后轮的侧偏刚度。
按照式(14),稳定行驶下横向速度vy可以表示成为

|
(15) |
式中:
|
(16) |
则期望的方向盘转角δss与预瞄误差oss之间的传递函数可表示为
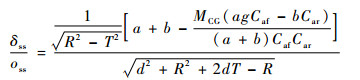
|
(17) |
由于不同车速下的预瞄距离对控制精度的影响不同,二次化预瞄距离dpre,以此提高车辆稳定,如式(18)所示:

|
(18) |
式中:tpre为预瞄时间;vx为当前车辆纵向速度;d0为固定的预瞄距离;k为比例系数。
在预瞄跟踪过程中,考虑到车辆的航向角对于车辆横向移动有很大影响,且由于矿山场景内横向距离误差要求,建立基于航向角误差及横向距离误差的横向闭环反馈。
图 5中,Ψ为车辆行驶的航向角,Ψr为期望航向角, Ψp为预瞄位置期望航向角。横向控制过程中,期望航向角包括当前位置期望航向角及预瞄位置期望航向角,分别计算当前状态误差ec、ep,可定义为

|
(19) |

|
(20) |

|
| 图 5 车辆航向角误差反馈 Fig. 5 Error feedback of vehicle heading angle |
根据实际场景测试,选用比例控制方案Kcp、Kpp来实现车辆的航向角控制,从而获得航向角反馈増量Δδt,即

|
(21) |
由于矿山环境复杂,高低起伏大,车辆横向精度要求严苛,积分控制具有消除稳态误差,因而在此基础上建立基于横向距离误差反馈的比例积分控制方案,计算t时刻横向距离误差et(t):

|
(22) |
式中:lc为t时刻车辆相对道路中心位置距离;lr为t时刻参考轨迹相对道路中心位置距离。
通过比例积分控制方案Klp、Kli,实现车辆横向距离控制,从而获得横向距离反馈増量Δδl,即

|
(23) |
式中el为横向距离误差。
结合上述计算得到的方向盘输出转角,可得最终方向盘转角δ输出应为

|
(24) |
基于车身的实时状态以及周围环境信息,横向控制器根据期望方向盘转角计算出相应的转向轮转向角度,并将控制角度指令传送到转向驱动器,驱动转向机构完成相应操作并反馈转向状态信息。车辆在转向过程中,基于自身状态不断纠正方向偏差,输出方向盘转角δ信息,以调整转向轮的转向角度,最终实现车辆的横向控制。
车辆横向控制方案如图 6所示。

|
| 图 6 横向控制方案 Fig. 6 Vehicle lateral control scheme |
矿用运输车辆无人驾驶系统的硬件结构如图 7所示,包括测试车辆、工控机、分布式智能计算单元(Distributed Intelligent Computing Unit, DICU)、毫米波雷达、激光雷达单元、惯导模块、急停机箱和电源模块等。测试车辆是TLD90非公路宽体自卸车,工控机型号是ARK-3500P-00A1E,毫米波雷达型号为DNMWR004,激光雷达单元分为带有旋转平台的单线激光雷达(型号为LMS511-10100-PRO),以及四线激光雷达(型号为MRS1104C-111011),惯导模块包括惯导以及前后天线,模块型号是XW-GI5651,急停机箱内置有24V电源模块,搭配紧急制动按钮手柄和5G无线通信模块,其中5G无线通信模块用于系统云平台与无人矿车的远程指令传输;电源箱包括了12V以及220V电源输出,其中220V电源输出是12V电源经过升压模块升压后输出,用来保障驾驶机器人电机的运行,12V电源为各传感器模块供电。

|
| 图 7 矿用运输车辆无人驾驶系统组成 Fig. 7 Composition of driverless system for mine transportation |
为验证感知模块在不同场景下检测障碍物类型的适应性,同时验证车辆对道路可行驶区域的检测效果,本文设置3种常见的矿区工况,分别进行检测:①在高低不平的泥土路上,周围20m内具有较多不规则障碍物的工况;②轿车在自动驾驶矿卡前方绕圈行驶,并带起一定密度扬尘的工况;③矿区正常作业时,大型卡车较多且密度较大的工况。
如图 8所示,无人驾驶矿用运输车辆具备较好的道路可行驶区域检测效果,其中深色点云数据队列显示的是道路两边的挡土墙。图 9表明,无人驾驶矿用运输车辆对20m以内的行人和周围其他障碍物有较好的检测效果。图 10表明,激光雷达可以滤除灰尘影响,并能够较好地检测和追踪轿车。图 11表明,感知系统在车辆正常作业时对卡车和周围障碍物有较好的检测效果。

|
| 图 8 对道路可行驶区域的检测效果 Fig. 8 Detection effect of road drivable area |

|
| 图 9 对行人和路边障碍物的检测效果 Fig. 9 Detection effect of pedestrian and roadside obstacles |

|
| 图 10 对轿车的检测效果 Fig. 10 Car detection effect |

|
| 图 11 对卡车和路边障碍物的检测效果 Fig. 11 Detection effect of trucks and roadside obstacles |
根据矿车的工作状况,选取装载点及卸载点停靠、弯道行驶以及上下坡行驶3种场景进行轨迹跟踪测试。
3.3.2 测试结果分析1) 装载点及卸载点停靠测试。装载点横向偏差在0.5m左右,纵向偏差超过1m(见图 12),航向偏差远小于要求值5°。卸载点横向偏差在0.5m以内,5次数据有2次超过0.3m,纵向偏差1.5m左右(见图 13),航向偏差远小于要求值5°。图中深色为采集路径,浅色为实际跑车路径。

|
| 图 12 装载点停靠路径 Fig. 12 Docking path of mount point |

|
| 图 13 卸载点停靠路径 Fig. 13 Docking path of unloading point |
2) 弯道行驶测试。在不同曲率弯道下的测试结果差别比较明显,如图 14及图 15所示。

|
| 图 14 曲率最大时轨迹 Fig. 14 Trajectory with maximum curvature |

|
| 图 15 曲率较小时轨迹 Fig. 15 Trajectory with small curvature |
3) 上坡、下坡速度偏差和横向偏差测试。为确保测试结果可靠性,本研究进行了2次上下坡测试:第1次上坡速度最大偏差4.7km/h,上坡横向最大偏差-0.49m,下坡速度最大偏差-2.89km/h,下坡横向最大偏差-0.49m,如图 16所示;第2次上坡速度最大偏差4.63km/h,上坡横向最大偏差-0.38m,下坡速度最大偏差-2.64km/h,下坡横向最大偏差-0.37m,如图 17所示。虽然上下坡速度控制效果一般,但上下坡横向偏差均在合理要求范围内。

|
| 图 16 第1次测试结果 Fig. 16 The first test results |

|
| 图 17 第2次测试结果 Fig. 17 The second test results |
为实现矿区的数字化、智慧化和自动化需求,本文主要从无人驾驶矿用运输车辆的应用需求和安全性需求入手,提出了针对复杂矿区道路环境的感知方法和车辆路径跟踪控制方法,最后在实车上集成开发并测试了真实矿区下的矿用运输车辆无人驾驶系统:
1) 开发了毫米波雷达与激光雷达融合的多目标识别算法。通过现场验证,算法能够准确识别行人、卡车、小型轿车等多种障碍物类型,具有较高检测精确度且能够适应矿区尘土飞扬的恶劣环境。
2) 攻克了无人驾驶矿用运输车辆的路径跟踪技术。采用预瞄-控制的跟踪理论,将纵向控制和横向控制解耦,并使用误差进行反馈控制调优。现场测试结果表明,本文提出的控制策略能够在装载点和卸载点、弯道行驶以及上下坡行驶过程中准确跟踪期望路径,获得的纵向速度偏差和横向位置偏差均在合理范围内。
3) 综上所述,本文设计开发的无人驾驶矿用运输车辆系统能够提高矿区生产作业的高效性和安全性。下一步将基于当前无人矿用运输车辆的发展现状,研究感知精度更高的传感器融合方案,且针对不同矿区的车辆运行环境以及矿用运输车辆车身结构差异,形成更加完善的控制策略及技术测试方案。
| [1] |
田国强. 人工智能技术在无人驾驶汽车领域的应用研究[J]. 江苏科技信息, 2017(14): 56-57. TIAN G Q. Research on the application of artificial intelligence technology in the field of driverless vehicles[J]. Jiangsu Science and Technology Information, 2017(14): 56-57. (in Chinese) |
| [2] |
科技讯.小松无人驾驶矿用卡车彻底无人没有驾驶室[EB/OL]. (2016-09-28)[2018-01-13]. http://www.kejixun.com/article/160928/229784.shtml. Science and technology news.The driverles mining truck of knomatsu is completely driverless with no cba[EB/OL]. (2016-09-28)[2018-01-13]. http://www.kejixun.com/article/160928/229784.shtml(in Chinese). |
| [3] |
郝永亮.中国非公路矿用汽车产业发展战略研究[D].呼和浩特: 内蒙古大学, 2013. HAO Y L.Study on the development strategy of non-highway mining automobile industry in China[D]. Huhehot: Inner Mongolia University, 2013(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10126-1014269707.htm |
| [4] |
张宇航. 无人驾驶汽车的起源、现状及展望[J]. 电子技术与软件工程, 2017(19): 109-110. ZHANG Y H. The origin, present situation and prospect of driverless cars[J]. Electronic Technology and Software Engineering, 2017(19): 109-110. (in Chinese) |
| [5] |
马硕. 无人驾驶汽车应用与发展现状分析[J]. 汽车与驾驶维修(维修版), 2017(4): 142-143. MA S. Analysis on the application and development of driverless vehicles[J]. Auto Driving & Service(Maintenance Version), 2017(4): 142-143. (in Chinese) |
| [6] |
HILLEL A B, LERNER R, LEVI D, et al. Recent progress in road and lane detection:A survey[J]. Machine Vision and Applications, 2014, 25(3): 727-745. |
| [7] |
LI Q, CHEN L, LI M, et al. A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios[J]. IEEE Transactions on Vehicular Technology, 2014, 63(2): 540-555. |
| [8] |
GANDHI T, TRIVED M M. Pedestrian protection systems:Issues, survey, and challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(3): 413-430. |
| [9] |
MATEI B C, TAN Y, SAWHNEY H S, et al.Rapid and scalable 3D object recognition using LIDAR data[C]//Conference on Automatic Target Recognition XVI.Bellingham: SPIE, 2006, 6234: 1.
|
| [10] |
DARMS M S, RYBSKI P E, BAKER C, et al. Obstacle detection and tracking for the urban challenge[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(3): 475-485. |
| [11] |
DARMS M, RYBSKI P, URMSON C.Classification and tracking of dynamic objects with multiple sensors for autonomous driving in urban environments[C]//IEEE Intelligent Vehicles Symposium, 2008: 1197-1202.
|
| [12] |
VU T D, BURLET J, AYCARD O. Grid-based localization and local mapping with moving object detection and tracking[J]. Information Fusion, 2014, 12(1): 58-69. |
| [13] |
JANAI J, GVNEY F, BEHL A, et al.Computer vision for autonomous vehicles: Problems, datasets and state-of-the-art[EB/OL]. (2017-04-18)[2019-01-13]. https://arxiv.org/abs/1701.05519.
|
| [14] |
任殿波, 崔胜民, 吴杭哲. 车道保持预瞄控制及其稳态误差分析[J]. 汽车工程, 2016, 38(2): 192-199. REN D B, CUI S M, WU H Z. Preview control for lane keeping and its steady-state error analysis[J]. Automotive Engineering, 2016, 38(2): 192-199. (in Chinese) |
| [15] |
YANG K, MENENDEZ M, ZHENG N. Heterogeneity aware urban traffic control in a connected vehicle environment:A joint framework for congestion pricing and perimeter control[J]. Transportation Research Part C, 2019, 105: 439-455. |
| [16] |
张缓缓, 李庆望, 彭博, 等. 紧急避障工况下的分布式驱动电动汽车稳定性控制[J]. 汽车技术, 2019(7): 30-35. ZHANG H H, LI Q W, PENG B, et al. Stability control of distributed driving electric vehicle under emergency obstacle avoidance[J]. Automobile Technology, 2019(7): 30-35. (in Chinese) |