



2. 中国人民解放军 93175部队, 长春 130000;
3. 空军工程大学 空管领航学院, 西安 710051
2. The Chinese People's Liberation Army, Unit 93175, Changchun 130000, China;
3. Air Traffic Control and Navigation College, Air Force Engineering University, Xi'an 710051, China
近年来,随着高新技术的快速发展,战机的机动性能得到了提高,但同时也给飞行员进行实时、高效的机动决策带来了很大困难。如何根据复杂的战场态势,快速、合理地进行空战机动决策,充分发挥战机空战作战效能,已经成为空战决策中最为关键的问题之一。目前,用于解决空战机动决策问题的智能算法有遗传算法[1]、贝叶斯网络[2]、影响图法[3]、微分对策法[4]、支持向量机[5]及其混合优化算法[6]等。然而这些算法收敛速度较慢,实时性差,有时得不到稳定的解,严重影响飞行员进行空战机动决策。
共生生物搜索(Symbiotic Organisms Search, SOS)算法是由Cheng和Prayogo[7]在2014年提出的一种新的智能算法。该算法在收敛速度和收敛精度上与传统智能算法相比具有较明显的改善,但是也存在缺陷,如容易陷入局部最优、收敛速度慢等。共生生物搜索算法从提出至今已有部分学者进行了改进。文献[8]提出了一种基于子群拉伸操作的精英共生生物搜索算法,提高了收敛速度和收敛精度,但容易出现早熟现象。文献[9]提出了一种基于旋转学习策略的共生生物搜索算法,将串行更新方式改为并行更新方式,用旋转学习策略代替盲目随机搜索,补充了种群多样性,提高了算法跳出局部最优的能力,但是实现起来难度较大。文献[10]将自适应和精英反向学习策略引入共生生物搜索算法中,增强了种群多样性,在一定程度上克服了算法耗时长的缺陷,但是后期收敛速度仍然有所偏慢。
针对上述分析,为进一步提高空战机动决策的精准性和时效性,本文提出了一种基于改进共生生物搜索算法的空战机动决策方法。为使决策结果更加贴近实战,对传统基本机动动作库进行了改进、扩充,重新构建了评价函数;针对传统生物体选择方式随机性大的缺陷,将轮盘赌选择方法引入传统共生生物搜索算法当中;针对传统共生生物搜索算法收敛精度低和收敛速度慢的缺陷,在寄生操作中采用适应值动态调整的变异率替代固定变异率,同时引入梯度的思想来引导变异方向,使控制量的寻优更具方向性,从而更快地完成空战机动决策解算。
1 空战机动决策建模 1.1 改进传统基本机动动作库目前常用的机动动作库设计类型有3种:第1种是依据经典空战战术飞行动作设计的典型战术动作库[11],第2种是依据常用的空战操作方式设计的基本操纵动作库[12],第3种是根据所需解决问题的实际需求设计的动作库[13]。由于本文设计的机动动作库是为战机飞行员进行机动决策作支撑,因此采用文献[12]中依据空战操作方式设计的思想进行基本机动动作库设计。文献[12]中共设计了7种基本的机动动作,由这7种基本的机动动作虽然可以组合出很多复杂的机动动作,但还是有很多常用的空战机动动作难以进行仿真实现,并且其中有6种进行了极限操作,与实际空战不符。本文根据文献[12]中基本操纵动作库存在的问题,对机动动作进行细化扩充,细化后的基本机动动作库包括减速前飞、匀速前飞、加速前飞、左侧爬升、爬升、右侧爬升、左转弯、右转弯、左侧俯冲、俯冲、右侧俯冲,如图 1所示。

|
| 图 1 基本机动动作库 Fig. 1 Basic maneuver inventory |
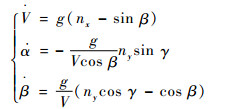
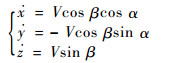
战机在空中进行机动决策的过程就是进行机动动作选择的过程。在选择机动动作后,需要根据机动动作的控制量求解出战机的运动状态,从而对飞行轨迹进行预测。目前运用于描述飞机本体的常用模型有2种:三自由度模型[14]和六自由度模型[15]。本文采用简单实用的三自由度质点运动模型对战机的飞行轨迹和相应姿态控制进行研究。忽略侧滑角的影响,战机三自由度质点运动模型如下:
|
(1) |
式中:V、α和β分别为战机飞行速度、航向角和俯仰角;nx和ny分别为战机切向过载和法向过载;γ为战机坡度;g为重力加速度,本文取9.8 m/s2。
通过观察式(1)可知,在给定V、α、β初始值的情况下,如果能求得nx、ny、γ随时间变化的规律,通过对


|
(2) |
传统的综合优势函数主要根据角度优势、距离优势、速度优势和高度优势进行构造,但随着战机性能在空战中发挥的作用越来越明显,传统的综合优势函数已经不适用于求解现代空战中的机动决策问题。因此本文以传统模型为基础,考虑战机性能优势,建立如图 2所示的空战优势评价指标体系。

|
| 图 2 空战优势评价指标体系 Fig. 2 Air combat superiority evaluation index system |
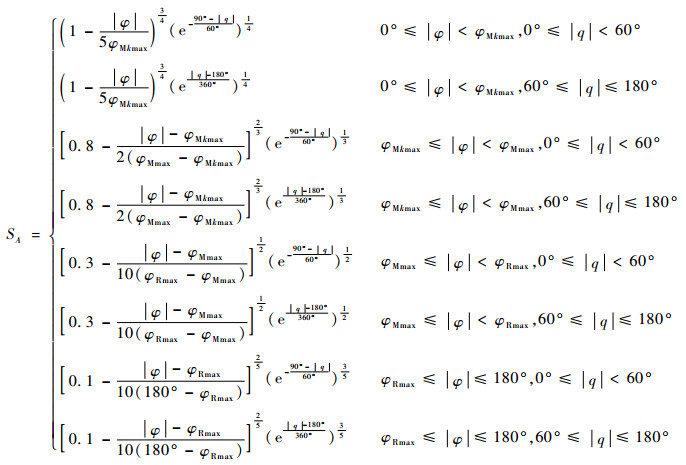
我机的角度优势应综合考虑敌机是否在我机雷达探测角和导弹离轴发射角范围内。假设敌我机雷达探测角和导弹离轴发射角分别为120°、80°,将敌我机几何态势进行划分,如图 3所示。图中:F和T分别为我方和敌方战机;VF和VT分别为我机速度矢量和敌机速度矢量;φMkmax、φMmax和φRmax分别为空空导弹最大不可逃逸区最大偏角、空空导弹最大离轴发射角和雷达最大搜索方位角;LOS为敌机与我机的连线。

|
| 图 3 敌我机几何态势划分示意图 Fig. 3 Schematic of geometric situation division of enemy and our fighter |
根据敌我机几何态势划分情况,定义角度优势函数如下:
|
(3) |
式中:q为我机进入角。
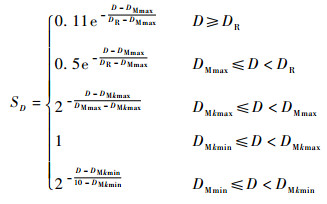
1.3.2 距离优势
|
(4) |
式中:D为我机与敌机之间的距离;DR为雷达最大搜索距离;DMmax、DMmin分别为最大、最小攻击距离;DMkmax、DMkmin分别为最大、最小不可逃逸距离。
1.3.3 速度优势当VFbest > 1.5VT时,
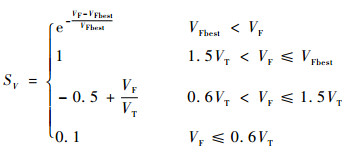
|
(5) |
当VFbest≤1.5VT时,
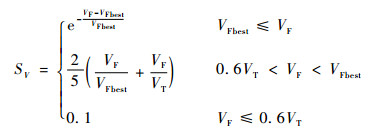
|
(6) |
式中:VF和VT分别为我机和敌机飞行速度;VFbest为我机最佳飞行速度。
1.3.4 高度优势
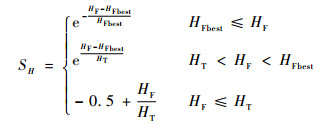
|
(7) |
式中:HF和HT分别为我机和敌机飞行高度;HFbest为我机最佳飞行高度。
1.3.5 战机性能优势近年来,战机性能得到了大幅提高,在空战中发挥的作用越来越重要,空战能力评估指标已成为空战优势评估指标体系中重要的组成部分。目前用于研究空战能力评估指标的方法主要有3类,即需要量评估法、概率分析法和参数计算法。需要量评估法采用计算完成预定任务所需战机数量的方法对战机性能的优劣进行评价;概率分析法采用完成预定任务概率高低的方法对战机性能的优劣进行评价;参数计算法采用选取相关参数计算战机相对作战能力的方法对战机性能的优劣进行评价。
参数计算法计算起来简单、直观,且已得到航空工业领域的普遍认可,因此,本文选取机动、火力、探测能力、操纵效能、生存力、航程系数和电子对抗能力系数等7个关键的参数,采用参数计算法对空战能力评估指标进行建模,具体公式如下:
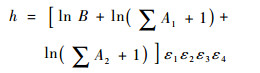
|
(8) |
式中:B为机动参数;A1为火力参数;A2为探测能力参数;ε1为操纵效能参数;ε2为生存力参数;ε3为航程系数;ε4为电子对抗能力系数。
1.3.6 综合优势函数

|
(9) |
式中:k1、k2、k3、k4、k5为指标权重;SF为战机性能优势。传统权重值的确定,常常是由人为给出,有很大的主观性和盲目性。为了更加合理地处理客观信息,本文采用熵权法动态确定指标权重。
2 改进的共生生物搜索算法 2.1 生物体选择方式的改进传统的共生生物搜索算法在进行互利共生、偏利共生、寄生操作时,采用随机方式进行生物体的选取,不符合优者多选、劣者少选的原则,在一定程度上会导致搜索算法收敛缓慢。基于此,本文采用基于适应度比例选择的轮盘赌方式进行生物体的选取,以提高算法收敛速度。假设种群中有m个生物体,算法步骤如下:
步骤1 计算种群中每个生物体的适应值f(Bi),Bi为生物体。
步骤2 计算每个生物体的选择概率,公式为
步骤3 将生物体按照选择概率的大小从小到大依次排列,并计算每个生物体的累积选择概率,公式为
步骤4 在0到1之间产生一个随机数a,并与pc(Bk)比较,若pc(Bk) < a < pc(Bk+1),则选择第k+1个个体。
将上述思想用图形表示,如图 4所示。

|
| 图 4 轮盘赌操作示意图 Fig. 4 Schematic of roulette wheel |
在进行寄生操作时,传统共生生物搜索算法的变异率通常选取固定值,这样很有可能使算法陷入局部最优,降低收敛精度。本文在传统共生生物搜索算法的基础上,采用根据适应值动态调整的变异率替代固定变异率,具体公式如下:
|
(10) |
式中:pv为动态变异率;fave(Bi)为生物体平均适应值;f(Bi)为被选中进行寄生操作的生物体适应值;fmax(Bi)为种群中最大的适应值;d1、d2为随机数。
采用根据适应值动态调整的变异率进行寄生操作,可使适应值高的生物体变异率更低,适应值低的生物体变异率更高,以便更好地提高优质生物体数量,降低劣质生物体数量,从而提高算法收敛速度和收敛精度。
传统共生生物搜索算法变异位的选取采用无方向、无经验的随机方式进行变异,势必会在一定程度上影响收敛速度和收敛精度。为满足实际空战机动决策需求,进一步提高算法搜索性能,本文利用梯度思想来引导生物体变异的方向,从而提高算法效率。具体步骤如下:
步骤1 计算种群中每个生物体的适应值f(Bi),选取适应值最大的生物体Bmax=[b1, b2, b3]为基准向量。
步骤2 按照2.1节中方法,选取待变异的生物体Bw=[bk+1, bk+2, bk+3]。
步骤3 将Bmax、Bw向量作差值运算,得
步骤4 若差值向量对应分量为正,则Bw的相应分量应增加;若差值向量对应分量为负,则Bw的相应分量应减小。具体公式如下:

|
(11) |
式中:t为当前进化代数;r为进化总代数;rand为均匀分布的随机数。
步骤5 若进行寄生操作后,生物体得到改善则代替原生物体,否则舍去。
函数某一点上的梯度指向代表函数增长最快的方向。将梯度思想引入共生生物搜索算法寄生操作中,引导生物体变异方向,能够加快算法的收敛速度,提高算法效率,快速达到全局最优。
2.3 共生生物搜索算法流程的改进结合以上改进措施,本文提出的改进共生生物搜索算法流程如图 5所示。

|
| 图 5 改进共生生物搜索算法流程 Fig. 5 Flowchart of improved SOS algorithm |
为验证本文算法的有效性,以敌我双方一对一空战进行仿真验证。仿真条件:我机初始位置为(0,40,7) km,飞行速度为950 km/h,俯仰角为0°,航向角为180°, 战机性能优势为0.670 4,最佳飞行高度为8 km, 最佳飞行速度为864 km/h, 雷达最大搜索方位角为80°,雷达最大搜索距离为120 km,导弹最大离轴发射角为50°,导弹最大攻击距离为60 km,导弹最小攻击距离为1 km,导弹最大不可逃逸区最大偏角为30°,最大不可逃逸距离为30 km,最小不可逃逸距离为5 km;敌机初始位置为(80,30,6) km,飞行速度为800 km/h,俯仰角为0°,航向角为300°, 战机空战能力为0.670 4,以5 s为仿真步长(空战过程中保持一种操纵状态的大致时间),200 s为仿真时长。初始种群为50,迭代次数为50,红方为我机,蓝方为敌机。仿真结果如图 6和图 7所示。

|
| 图 6 敌我双方空战对抗三维航迹展示 Fig. 6 Three-dimensional track display of both sides in air combat |

|
| 图 7 敌我双方航向角、飞行高度、飞行速度和空战优势变化曲线 Fig. 7 Heading angle, height, speed and air combat superiority change curves of both sides |
图 6和图 7(a)、(b)、(c)描述了敌我双方在空战对抗中的运动轨迹以及敌我双方航向角、飞行高度、飞行速度等参数的变化情况。从图 6和图 7可以看出,初始阶段我机在飞行高度和飞行速度上与敌机相比较具有一定的优势,在角度上处于劣势,通过左转机动调整航向,扭转我机在角度上的不利局面。在敌我双方保持相对均势的情况下,我机抓住有利时机,通过大角度右转机动,对敌机形成了尾后攻击态势,并通过不断改变飞行速度、飞行高度和航向等参数,继续保持空战优势。为了避免我机空空导弹对敌机的攻击,敌机迅速进行左转机动,试图改变我机对敌机形成的尾后攻击态势,我机迅速进行左转机动,并不断调整各参数,使空战态势向着有利于我方的方向发展,为第二次进行攻击做准备。综上所述,我机能够根据不断改变的空战态势迅速地进行合理的机动决策,从而占据有利的攻击阵位。
图 7(d)描述了敌我双方的空战优势变化情况,可以看出,我机在空战初始阶段处于相对劣势地位,通过不断地进行合理的机动决策,由劣势地位转化为优势地位,并能够在大多数情况下保持相对优势,证明了该机动决策方法是可行和有效的。
3.2 算法性能分析为了进一步分析本文算法性能,将其与文献[10]中的改进共生生物搜索算法和传统共生生物搜索算法进行比较。设置相同的进化参数,采用2种方法对相同算例进行仿真,在MATLAB平台上分别进行50次仿真。3种算法收敛精度对比如图 8所示,算法最优值求解和消耗时间如图 9所示。

|
| 图 8 3种算法收敛精度对比 Fig. 8 Comparison of convergence accuracy of three algorithms |

|
| 图 9 3种算法最优值和消耗时间对比 Fig. 9 Comparison of optimal values and time consumption of three algorithms |
从图 8和图 9可以看出,本文改进共生生物搜索算法不论是在最优值求解上还是在时间消耗上都优于文献[10]中改进共生生物搜索算法和传统共生生物搜索算法,解决了算法容易陷入局部最优的问题,能够在相对短的时间内能收敛到更高的最优目标函数适应值,验证了本文所提改进共生生物搜索算法更适合解决空战机动决策问题。
4 结论本文主要研究了空战机动决策问题,对传统共生生物搜索算法进行了改进,以一对一空战为背景,采用改进的共生生物搜索算法分析空战机动决策,得到了我方战机的最优机动决策。
1) 通过对算法有效性进行验证,发现我机虽然在空战之初处于角度上的劣势,但随着时间的推移,我机对敌机构成尾后攻击态势,验证了本文算法的有效性。
2) 通过对算法的性能进行分析,发现本文算法与2种共生生物搜索算法相比,无论在收敛速度还是收敛值上都具有较强的优势,验证了本文算法更能满足实际空战需求。
多机协同空战已经成为空战的主要作战样式,下一步将主要在本文工作的基础上,研究多机协同条件下的空战机动决策问题,从而为多机协同空战条件下的空战机动决策提供理论支撑。
| [1] |
张涛, 于雷, 周中良, 等. 基于变权重伪并行遗传算法的空战机动决策[J]. 飞行力学, 2012, 30(5): 470-474. ZHANG T, YU L, ZHOU Z L, et al. Decision-making for air combat maneuvering based on variable weight pseudo-parallel genetical gorithm[J]. Flight Dynamics, 2012, 30(5): 470-474. (in Chinese) |
| [2] |
孟光磊, 罗元强, 梁宵, 等. 基于动态贝叶斯网络的空战决策方法[J]. 指挥控制与仿真, 2017, 39(3): 49-54. MENG G L, LUO Y Q, LIANG X, et al. Air combat decision-making method based on dynamic Bayesian network[J]. Command Control and Simulation, 2017, 39(3): 49-54. DOI:10.3969/j.issn.1673-3819.2017.03.011 (in Chinese) |
| [3] |
周思羽, 吴文海, 孔繁峨, 等. 基于随机决策准则的改进多级影响图机动决策方法[J]. 北京理工大学学报, 2013, 33(3): 296-301. ZHOU S Y, WU W H, KONG F E, et al. Improved multistage influence diagram maneuvering decision method based on stochastic decision criterions[J]. Transactions of Beijing Institute of Technology, 2013, 33(3): 296-301. DOI:10.3969/j.issn.1001-0645.2013.03.017 (in Chinese) |
| [4] |
PARK H, LEE B Y, TAHK M J, et al. Differential game based air combat maneuver generation using scoring function matrix[J]. International Journal of Aeronautical and Space Sciences, 2016, 17(2): 204-213. DOI:10.5139/IJASS.2016.17.2.204 |
| [5] |
赖少发, 刘华军. 机动目标跟踪支持向量回归学习新方法[J]. 南京理工大学学报, 2017, 41(2): 264-268. LAI S F, LIU H J. Novel approach in maneuvering target tracking based on support vector regression[J]. Journal of Nanjing University of Science and Technology, 2017, 41(2): 264-268. (in Chinese) |
| [6] |
张涛, 于雷, 周中良, 等. 基于混合算法的空战机动决策[J]. 系统工程与电子技术, 2013, 35(7): 1445-1450. ZHANG T, YU L, ZHOU Z L, et al. Decision-making for aircombat maneuvering based on hybrid algorithm[J]. Systems Engineering and Electronics, 2013, 35(7): 1445-1450. (in Chinese) |
| [7] |
CHENG M Y, PRAYOGO D. Symbiotic organisms search:A new metaheuristic optimization algorithm[J]. Computers & Structures, 2014, 139: 98-112. |
| [8] |
王艳娇, 马壮. 基于子种群拉伸操作的精英共生生物搜索算法[J]. 控制与决策, 2018, 18(4): 1-11. WANG Y J, MA Z. Elite symbiotic organisms search algorithm based on subpopulation stretching operation[J]. Control and Decision, 2018, 18(4): 1-11. (in Chinese) |
| [9] |
王艳娇, 陶欢欢. 基于旋转学习策略的共生生物搜索算法[J]. 计算机应用研究, 2017, 34(9): 2614-2617. WANG Y J, TAO H H. Symbiotic organisms search algorithm based on rotating learning strategy[J]. Computer Application Research, 2017, 34(9): 2614-2617. DOI:10.3969/j.issn.1001-3695.2017.09.011 (in Chinese) |
| [10] |
周虎, 赵辉, 周欢, 等. 自适应精英反向学习共生生物搜索算法[J]. 计算机工程与应用, 2016, 52(19): 161-166. ZHOU H, ZHAO H, ZHOU H, et al. Symbiotic organisms search algorithm using adaptive elite opposition based learning[J]. Computer Engineering and Applications, 2016, 52(19): 161-166. DOI:10.3778/j.issn.1002-8331.1604-0110 (in Chinese) |
| [11] |
VIRTANEN K, RAIVIO T, HAMALAINEN R P. Decision theoretical approach to pilot simulation[J]. Journal of Aircraft, 1999, 36(4): 632-641. DOI:10.2514/2.2505 |
| [12] |
AUSTIN F.Automated maneuvering decisions for air-to-air combat: AIAA-87-2393[R].Reston: AIAA, 1987.
|
| [13] |
卢惠民, 杨蔷薇. 飞行仿真数学建模与实践[M]. 北京: 航空工业出版社, 2007. LU H M, YANG Q W. Flight simulation mathematic modeling and practice[M]. Beijing: Aviation Industry Press, 2007. (in Chinese) |
| [14] |
何旭, 景小宁, 冯超. 基于蒙特卡洛树搜索方法的空战机动决策[J]. 空军工程大学学报(自然科学版), 2017, 18(5): 36-41. HE X, JING X N, FENG C. Air combat maneuver decision based on MCTS method[J]. Journal of Airforce Engineering University (Natural Science Edition), 2017, 18(5): 36-41. DOI:10.3969/j.issn.1009-3516.2017.05.007 (in Chinese) |
| [15] |
国海峰, 侯满义, 张庆杰, 等. 基于统计学原理的无人作战飞机鲁棒机动决策[J]. 兵工学报, 2017, 38(1): 160-167. GUO H F, HOU M Y, ZHANG Q J, et al. UCAV robust maneuver decision based on statistics principle[J]. Acta Armamentarii, 2017, 38(1): 160-167. DOI:10.3969/j.issn.1000-1093.2017.01.021 (in Chinese) |