



2. 清华大学 汽车安全与节能国家重点实验室, 北京 100084
2. State Key Lab of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China
随着全球环境问题的加剧,车辆的低能耗和低排放日益成为人们关注的焦点。信号交叉口是中国城市道路网的重要节点,由于受到信号灯的周期性干扰,车辆通常需要在信号交叉口处停车等待,导致交叉口交通拥堵,增加车辆的旅行时间、燃油消耗和污染物排放[1-2],并且会对车辆运行过程中的安全性和舒适性造成影响。相关研究表明,车辆的燃油消耗量和污染物排放量与车辆的速度、加速度/减速度的大小呈正相关[3-5],因此尽可能地避免急加速、急减速以及怠速等驾驶行为可以降低车辆通过连续信号交叉口的燃油消耗和污染物排放[6]。随着人工智能、传感器检测等技术的完善,自动驾驶汽车发展迅速[7],而近年来车联网技术的发展为自动驾驶车辆实时动态的速度调整提供了技术支持[8]。在车联网环境下,自动驾驶车辆可以与路侧设施及区域中心控制系统实时通信,提前获得路网交通流状态以及下游信号灯状态的实时信息,并及时地做出速度调整,从而使得车辆平滑地通过各信号交叉口,提高燃油经济性的同时减少了污染物的排放。
对于连续信号交叉口的控制问题,目前应用比较广泛的是绿波控制策略,这种控制策略的目标是最大化绿波带的宽度[9-10]。但是运用绿波控制的限制条件比较多,例如相邻交叉口的间距要大致相等,双向行驶的车辆车速要相近,或呈比例关系,并且要求所有交叉口的信号周期长度相等[11],这些要求使得绿波控制策略难以大范围地运用在区域交通组织中[12-13]。随着车联网技术的不断发展,更为方便有效的交通控制方法是车辆根据这些信息及时地做出速度调整,从而在绿灯期间通过交叉口。
目前,国内外对于车联网环境下信号交叉口的速度控制问题大部分集中在对单交叉口的研究[14-15]上,对于连续信号交叉口网联自动驾驶车速控制的研究还相对较少,比较有代表性的成果有:Kundu等[16]以车辆不停车通过下游各个信号交叉口为目标,在每个交叉口前一定范围内确定车辆可以在绿灯时间内通过交叉口的最优速度,据此速度进行调整,这种控制方法有些类似于绿波控制,只是不是通过调整信号配时而是通过调整车速来完成的;Chang[17]通过在计算交叉口聚合通过率时引入绿波矩阵建立了主干道多个信号交叉口间的动态交通控制框架;Asadi和Vahidi[18]利用下游信号相位与时长信息,预测车辆能够在下游交叉口绿灯时间内通过的巡航控制速度,使车辆尽量以一个相对稳定的速度通过下游连续多个交叉口;Rakha等[19]基于VT-Micro模型计算出保证车辆燃油经济性的加速度集合,并通过一个车辆动力学模型得出车速调整过程中实时的瞬时速度;Xia等[20]基于下游交叉口的信号相位信息,考虑能耗和排放,提出了信号交叉口速度规划算法,并通过选取合适的速度和加速度集合来保证行驶过程中的驾驶舒适性。
从以上研究现状可以看出,现有研究大多将连续信号交叉口看成多个单点信号交叉口控制的结合,并且通常只在信号交叉口前对车辆进行速度控制,对车辆通过信号交叉口之后的运动状态没有明确的说明,而车辆在路段上频繁的速度波动也会引起油耗和污染物排放的增加,这一影响因素同样不可忽视。Ahn等[21]的研究表明,保持一个恒定的速度行驶,避免不必要的加速和减速是绿色驾驶的关键。本文针对车联网环境下自动驾驶车辆可以与路侧设施及区域中心控制系统实时通信的特征,在车辆进入控制区域之后根据下游各交叉口信号灯信息以及距各交叉口的距离及时地做出速度调整,使车辆尽可能以一个相对恒定的速度不停车通过连续多个信号交叉口,优化连续信号交叉口的交通控制,并通过搭建仿真平台进行了方法验证。
1 问题描述车辆在城市道路上行驶时往往会遇到红灯而被迫停车。图 1为不同车辆通过连续信号交叉口时的轨迹示意图。在无速度控制的情况下,由于驾驶员的个人喜好等因素可能造成车速过快或过慢,从而导致遇到红灯而被迫停车,如轨迹1和轨迹2所示。笔者的研究目的就是根据下游各信号交叉口的信号相位信息,计算出使车辆可以连续通过下游多个信号交叉口的目标车速,有针对性地控制车辆的行驶速度,使车辆尽可能以一个恒定的速度一路绿灯通过下游连续多个信号交叉口,如轨迹3所示。从而达到节能减排的效果,同时由于车辆不用在交叉口处停车等待,节省了绿灯启亮时的启动损失时间,一定程度上也可以缩短车辆的旅行时间。

|
| 图 1 连续信号交叉口车辆运动轨迹示意图 Fig. 1 Schematic of vehicle movement trajectory at successive signalized intersections |
车联网是由人、车、路等信息组成的巨大交互网络。在完全车联网的环境下,网联自动驾驶车辆可以与路侧设施之间实时信息交互。图 2为连续信号交叉口车速控制系统架构示意图,该系统主要由以下3类控制单元构成:连续信号交叉口车速控制区域内配备一个区域中心控制单元(Central Control Unit, CCU),用于接收与处理各交叉口控制单元发送来的车辆运动状态与信号灯信息;每个交叉口配备一个交叉口控制单元(IntersectionControlUnit, ICU),用于汇总即将通过该交叉口的全部车辆的运动状态信息并发送至区域中心控制单元;每辆即将进入交叉口的自动驾驶车辆全部配备一个车载单元(Vehicle Unit, VU),用于采集车辆运动状态信息,接收区域中心控制单元发送的车速调整信息,并执行对网联自动驾驶车辆的速度控制。

|
| 图 2 连续信号交叉口车速控制系统架构示意图 Fig. 2 Schematic of speed control system architecture at successive signalized intersections |
为具体化研究对象,本文建立在以下基本假设条件之上:
1) 网联自动驾驶车辆完全服从区域中心控制单元的速度控制,车载单元和交叉口控制单元、区域中心控制单元可实时通信,通信延迟可忽略不计。
2) 在控制区域内车辆不允许有超车、换道行为。
3) 道路坡度为零。
4) 车辆通过信号交叉口时不考虑行人和非机动车的干扰。
5) 给定满足通行条件的信号交叉口合理信号配时。
2.3 连续信号交叉口车速控制方法图 3为连续信号交叉口车速控制流程。

|
| 图 3 连续信号交叉口车速控制流程图 Fig. 3 Flowchart of speed control at successive signalized intersections |
在车联网环境下,当车辆进入车速控制区域时,车载单元自动向交叉口控制单元发送自身的位置、速度、加速度等信息,交叉口控制单元接收车载单元发来的信息并打包发送给区域中心控制单元,区域中心控制单元接收到车辆信息,根据车辆距下游各个交叉口的距离以及各交叉口的信号相位信息计算出目标控制车速以及最优加速度,并向自动驾驶车辆发布,车载单元即控制车辆做出加速或减速的调整。
假设车辆进入速度控制区域的时刻为零时刻,位置为坐标原点位置,Li(i=1, 2, …)表示车辆进入速度控制区域时距离下游第i个信号交叉口的距离,gij表示第i个信号交叉口第j次绿灯开始时刻,rij表示第i个信号交叉口第j次红灯开始时刻,如图 4所示。若此时下游第1个交叉口为绿灯,为避免停车,车辆应该在当前绿灯期间通过或者下一绿灯期间通过,即

|
(1) |

|
| 图 4 连续信号交叉口车辆运动轨迹时空图 Fig. 4 Time-space diagram of vehicle movement trajectories at successive signalized intersections |
若此时下游第1个交叉口为红灯,则车辆应当在红灯结束之后的下一个绿灯时间内通过,即
|
(2) |
式中:t1为车辆到达下游第1个信号交叉口的时间;g11为下游第1个信号交叉口第1次绿灯启亮时刻;r11为下游第1个信号交叉口第1次红灯启亮时刻;r12为下游第1个信号交叉口第2次红灯启亮时刻。
那么车辆能够在第1个信号交叉口绿灯时间内通过的可行速度集合为

|
(3) |
式中:[vs1, vb1]为车辆通过下游第1个信号交叉口的目标车速区间, vs1和vb1分别为车辆可以在绿灯时间内通过的最小速度和最大速度;L1为车辆进入控制区域时距离下游第1个信号交叉口的距离;vmin为路段最小限速;vmax为路段最大限速。
如果存在一个可行速度集合使得车辆可以不停车通过第1个信号交叉口,那么用同样的方法

最终的可行速度的集合为[vs1, vb1]∩[vs2, vb2]∩…∩[vsi, vbi]=[vs, vb],考虑到减少旅行时间的需要,在最终的可行速度区间内取最大速度vb作为车辆通过连续信号交叉口的最终控制车速。需要说明的是,通过第1个信号交叉口和通过第2个信号交叉口的2个可行速度集合之间没有交集并不说明控制失效,可以根据vb=vb1控制车辆通过第1个信号交叉口之后,重新调整速度使其在第2个信号交叉口绿灯期间通过。
需要注意的是,上述确定目标车速的过程没有考虑交叉口前车辆排队的情况,在完全车联网的环境下,交叉口中心控制单元可以实时接收到交叉口进口道前车辆的运动状态信息,因此可以实时获取进口道停车线前的排队长度及排队车辆数。此外,当车流密度比较大时,根据Yang等[22]提出的基于交通波理论的排队消散时间预测方法,可以预估后续车辆到达停车线的时刻,进而可修正本文提出的网联自动驾驶车速控制模型,对车速进行有效控制。
2.4 车速调整过程中加速度/减速度的确定方法目标控制车速vb确定之后,下一步就是速度调整的过程。如果当前车辆的速度v0小于目标控制车速vb,车辆需要加速行驶,反之,则需减速行驶。为了达到使车辆在下游交叉口绿灯时间内到达交叉口的目的,需要在特定的时间内完成车速调整的过程。本文以减少燃油消耗和污染物排放为目的,考虑到加减速过程中乘客的舒适性需求,速度变化应尽量平滑,因此采用Xia等[20]提出的三角函数增长曲线来表征速度的变化。图 5为自动驾驶车辆加速和减速过程中速度变化的示意图,其速度表达式如下:

|
| 图 5 自动驾驶车辆加速和减速过程中速度变化示意图 Fig. 5 Schematic of speed change during acceleration and deceleration process of automated vehicle |
|
(4) |
式中:L为车辆距离下游交叉口的距离; m和n为速度曲线的形状参数,不同的(m, n)集合代表不同的速度剖面,m控制区域A的加速度/减速度变化率,n控制区域B和D的加速度/减速度变化率,m和n的取值越大,表明车辆的加速度/减速度越大。
要使车辆可以在特定的绿灯时刻到达交叉口,应该保证图 5中A部分的面积等于B、C、D三部分的面积之和,即
|
(5) |
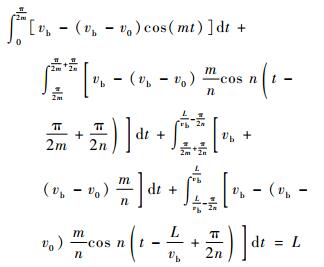
式(5)经整理得

|
(6) |
当参数m固定时,式(6)可以看成是一个关于n的一元二次方程,当且仅当m≥3.71/t时n有实根,这里,

|
(7) |
m和n的值理论上是由车辆发动机的功率决定的,但实际情况中往往受道路条件、行车安全以及驾驶舒适性的限制。Yi和Chung[23]的研究表明,考虑驾驶员及乘客乘坐舒适性的最大加速度的绝对值不应超过2.5 m/s2,而加速度变化率j的绝对值不能超过10 m/s3。车辆最大加速度的变化率可以通过式(8)计算:

|
(8) |
本文采用缓慢变速的变加速速度调整函数,与以往的匀加速控制相比,速度调整方法计算相对复杂,但乘客舒适性更好。
2.5 车速调整过程中的约束条件城市道路上的交通流量很大,车辆难免会受到路段上前方车辆的影响,为了保证交通安全,车辆在速度调整过程中必须受到以下约束:
1) 行驶过程中与前车之间的安全间距约束

|
(9) |
2) 路段限速约束

|
(10) |
3) 最大加速度约束
|
(11) |
4) 加速度变化率约束
|
(12) |
式中:a为车辆的加速度;j为加速度的变化率;S为前后车的安全间距;Δt为反应、机械延误等损失时间之和;Di-1为第i-1辆车的长度;vi为第i辆车的速度;vi-1为第i-1辆车的速度。
3 模型仿真与验证 3.1 仿真实例车联网环境下的交通系统相比传统环境变为各部分相互联系、相互交织和相互影响的复杂巨系统,难以用传统的数学建模等方法对其进行精确的描述和仿真。而多智能体技术能够通过对微观个体行为进行建模,并通过大量智能体的行动和交互作用涌现出宏观现象,为交通仿真开辟了一个新的途径。本文基于可编程的多智能体仿真软件NetLogo开发仿真平台,把车辆和驾驶员作为一个整体描述为车辆-驾驶员智能体,将车联网环境下速度控制方法写入智能体的行动规则,并设定了代表中心控制系统的智能体,用于与车辆-驾驶员智能体实时信息交互,指导车辆-驾驶员智能体的运动。
本文的仿真道路为一条单车道道路,如图 6所示。仿真系统由3个信号交叉口构成,车辆自西向东依次通过各个信号交叉口,控制区域总长为1 800 m,相邻信号交叉口之间的距离为500 m,速度控制区域的起点位于下游第1个信号交叉口前200 m处。L1、L2、L3分别为车辆进入控制区域时距下游第1、第2、第3个信号交叉口的距离。每个信号交叉口为固定两相位信号配时,为了简化控制,将黄灯相位包含在红灯相位中。仿真中选取的车型全部为小汽车,车长统一为5 m。仿真验证过程中采用的具体参数设置如表 1所示。本文中仿真参数g11、g21、g31等的初始设置经过多次调试,满足路段通行能力的要求。在仿真过程中,只有当车辆与前车的距离满足安全间距约束时,才能够按特定的速度变化曲线进行速度调整。否则,需要重新调整速度变化曲线的形状参数,使其满足前后车的安全间距约束。

|
| 图 6 连续信号交叉口仿真路网 Fig. 6 Simulated road network of successive signalized intersections |
| 参数 | 数值 |
| vmax/(km·h-1) | 60 |
| vmin/(km· h-1) | 10 |
| L1/m | 400 |
| L2/m | 900 |
| L3/m | 1 400 |
| amax/(m· s-2) | 2.5 |
| amin/(m· s-2) | -2.5 |
| jmax/(m· s-3) | 10 |
| g11/s | 10 |
| r11/s | 60 |
| g21/s | 80 |
| r21/s | 20 |
| g31/s | 30 |
| r31/s | 80 |
| 仿真时间/min | 120 |
本文搭建了2种不同的驾驶环境场景:①传统驾驶环境场景,在仿真路段的起点处以一定的来车率(低、中、高)生成车辆,并赋予其初速度(在10~60 km/h之间随机分配),然后在满足车辆跟驰约束的条件下让车辆自由运行,即前方如果有车,则停止,前方无车,则加速或匀速运行。②车联网环境场景,车辆的生成方式与传统驾驶环境下是一样的,所不同的是,当车辆运行到速度控制区域的起点(第1个交叉口前200 m)时,车辆的运动状态信息会被采集并发送到中心控制系统(目标车速计算模块),中心控制系统则根据收集到的信息计算目标车速并生成相应的速度调整函数,再反馈给车辆,车辆即按反馈回的速度调整函数调整速度直至达到目标车速。
车辆在行驶过程中的燃油消耗和污染物排放量通过经典的VT-Micro模型[24-25]计算得出,该模型的输入是车辆的速度和加速度,输出是车辆每秒的污染物排放及燃油消耗量。式(13)为模型表达式:

|
(13) |
式中:My, i(k)为第i辆车在步长k时的污染物排放和燃油消耗量;vi(k)为第i辆车在步长k时的速度;ai(k)为第i辆车的加速度;Py为系数矩阵,根据橡树岭国家实验室的实验数据得出;y为CO、HC、NOx排放和燃油消耗等因子。VT-Micro模型不能评价CO2的排放量。但是,根据文献[24]发现燃油消耗与CO2排放量之间有着一定关系,因此CO2排放量可以通过该关系计算得到:

|
(14) |
式中:ECO2, i(k)为车辆i在步长k时的CO2排放量;Efuel, i(k)为车辆i在步长k时的燃油消耗量;δ1和δ2为系数,对于汽油车分别为3.5×10-8 kg/m和2.39 kg/L,对于柴油车分别为1.17×10-6 kg/m和2.65 kg/L[24]。
根据

|
(15) |
式中:tini为车辆进入控制区域的时刻;touti为车辆离开控制区域的时刻;i为车辆序号;N为控制区域内的车辆数。
3.2 仿真结果分析本文在2种车流密度状态下分别进行了仿真分析。当交通量低于400 pcu/h时(pcu为标准车当量数),为低车流密度状态,当交通量为400~1 000 pcu/h时,为中、高车流密度状态,当交通量高于1 000 pcu/h时,为过饱和车流密度状态。此时车流的排队及跟驰行为更加复杂,本文暂不考虑这种状态。
仿真中通过VT-Micro模型实时计算控制区域内车辆的总油耗和CO2排放量,并通过Net-Logo内置的仿真时钟实时采集车辆在控制区域内的行程时间。图 7为低密度车流下车辆有速度控制和无速度控制单位时间内的平均燃油消耗量、CO2排放量以及行程时间的比较。中、高车流密度下这3个评价指标的比较与低密度车流下的类似,本文不再一一列举,为了验证本文车速控制方法的有效性,针对不同的车流密度,本文分别就有速度控制和无速度控制2种情况下重复进行了20次仿真实验,实验结果如表 2和表 3所示。

|
| 图 7 低密度车流下车辆通过连续3个信号交叉口的平均燃油消耗量、CO2排放量和行程时间比较 Fig. 7 Comparison of average fuel consumption, CO2 emissions and travel time when vehicle passes through three successive signalized intersections under low traffic density |
| 指标 | 有速度控制 | 无速度控制 | |||
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 燃油消耗量/(L·s-1) | 1.96 | 1.14 | 2.85 | 1.88 | |
| CO2排放量/(mg·s-1) | 4.68 | 2.71 | 7.05 | 4.50 | |
| 行程时间/s | 192.31 | 19.37 | 201.75 | 63.13 | |
| 指标 | 有速度控制 | 无速度控制 | |||
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 燃油消耗量/(L·s-1) | 7.25 | 3.47 | 9.36 | 2.94 | |
| CO2排放量/(mg·s-1) | 18.49 | 4.81 | 23.05 | 4.74 | |
| 行程时间/s | 287.12 | 10.28 | 340.77 | 20.56 | |
从表 2可以看出,在低密度车流下运用本文车速控制方法,网联自动驾驶车辆通过连续3个信号交叉口的单位时间平均燃油消耗量以及CO2排放量降低了30%以上,行程时间减少了约5%。这是因为该车速控制方法减少了车辆行驶过程中的速度波动,并且加、减速的过程更加平滑,从而有效减少了单位时间内的平均燃油消耗量和CO2排放量。但是,由于用于速度控制的目标车速是不断求交集得出来的,尽管有效减少了停车次数,但相比较于自由流速度会低一些,因此平均行程时间相比较于无速度控制的情况降低不明显。但从图 7(c)可以看出,在车联网环境下加入速度控制之后,不同车辆行程时间的标准差明显减小,路段上车流的运行趋于相对稳定的状态。
表 3为中、高密度车流下有速度控制和无速度控制车辆的平均燃油消耗量、CO2排放量和行程时间的比较。可以看出,在中、高密度车流下,车辆行程时间减少了15%以上,同时平均燃油消耗量和CO2排放量降低了约20%。这是因为当车流密度比较高时,传统驾驶环境下车辆速度不受控制,一旦前方车辆遇到红灯减速停车会造成后续接连几辆车延误时间的增加,而适当的速度控制可以使得整体交通流的运行更加连续和稳定。因此,在中、高密度车流下更能体现出车联网环境下速度控制的优势。
为了进一步验证本文提出的连续信号交叉口车速控制方法相比于单点信号交叉口车速控制方法的有效性,在本文既定的仿真场景下,运用Xia等[20]提出的单点信号交叉口车速控制方法控制车辆通过仿真路段,并对比2种控制方法下网联自动驾驶车辆通过速度控制区域的平均行程时间、燃油消耗量和CO2排放量。
不同车速控制方法下车辆的平均燃油消耗量、CO2排放量和行程时间的比较如表 4所示。可以看出,针对单点信号交叉口的车速控制方法,由于车辆在每个信号交叉口前都需要进行速度调整,其在单位时间内控制区域内车辆的平均燃油消耗量以及CO2排放量均高于本文提出的连续信号交叉口车速控制方法。但在低密度车流下,车辆的平均行程时间要优于本文的车速控制方法。这是因为本文的目标车速是考虑减少车速的波动而不断求交集得出来的,在低密度车流下,与Xia等[20]针对单点交叉口的车速控制方法相比,本文提出的面向连续信号交叉口的车速控制方法计算出的目标车速会略小一些,从而车辆的平均行程时间也稍多一些。而在中、高车流密度下,车辆之间有较强的跟驰行为,此时,针对单点信号交叉口的车速控制方法在减少车辆的平均行程时间方面并没有明显的优势。因此,从节能减排的角度考虑,本文提出的面向连续信号交叉口的车速控制模型要优于针对单点信号交叉口的车速控制。
| 方法 | 燃油消耗量/(L·s-1) | CO2排放量/(mg·s-1) | 行程时间/s | |||||
| 低密度 | 中、高密度 | 低密度 | 中、高密度 | 低密度 | 中、高密度 | |||
| 单点信号交叉口 | 2.68 | 9.62 | 6.41 | 23.27 | 164.76 | 283.49 | ||
| 连续信号交叉口 | 1.96 | 7.25 | 4.68 | 18.49 | 192.31 | 287.12 | ||
4 结论
1) 本文利用车联网环境下自动驾驶车辆可以与路侧设施以及区域中心控制系统实时通信的特征,根据下游各信号交叉口的信号相位信息以及车辆距各信号交叉口的距离计算出使车辆能够在下游各信号交叉口绿灯期间通过的相对恒定的运行速度,并考虑了驾驶舒适性的需要,合理地选取速度变化过程中的控制参数,使速度调整过程尽可能得平缓。
2) 初步的仿真结果显示,在低密度车流下,本文车速控制方法能够减少30%以上的平均燃油消耗量以及CO2排放量,但对平均行程时间的降低作用不明显;在中、高密度车流下,运用本文车速控制方法不仅能够减少平均燃油消耗量以及CO2排放量,并且可以显著节省车辆的平均行程时间;通过与针对单点信号交叉口的车速控制模型的对比,本文提出的面向连续信号交叉口的车速控制方法节能减排效果更优。
虽然现在车联网和自动驾驶技术尚未大规模普及,但近年来与此相关的技术正快速发展,车联网与自动驾驶技术的测试与应用已成为中国多家车企、互联网公司以及各大高校研究的热点。本文的研究能够对未来自动驾驶汽车和车联网技术在城市交通规划与管理中的应用推广起到积极作用。
本文的研究仍有一些不足之处,目前的连续信号交叉口车速控制模型只考虑了一条车道上行驶的一列车队,未涉及换道及超车的控制,对多车道环境下的车速控制仍需进一步研究;当车流密度比较大时,排队车流会对车速控制模型产生一定影响,因此对高饱和状态下的车速控制模型仍需深入研究;此外,对车辆的速度控制方法是针对单车进行的,在车辆网环境下针对多车协同、车车交互的车速控制方法将是下一步的研究方向。
| [1] |
安实, 姚焓东, 姜慧夫, 等. 信号交叉口绿色驾驶车速控制方法[J]. 交通运输系统工程与信息, 2015, 15(5): 53-59. AN S, YAO H D, JIANG H F, et al. A green driving speed control method at signal intersection[J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(5): 53-59. DOI:10.3969/j.issn.1009-6744.2015.05.008 (in Chinese) |
| [2] |
姚焓东.面向绿色驾驶的信号交叉口车速动态控制方法研究[D].哈尔滨: 哈尔滨工业大学, 2015. YAO H D.Vehicle speed dynamic control method research at signal intersection for green driving[D].Harbin: Harbin Institute of Technology, 2015(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1015981827.htm |
| [3] |
MYHRBERG S.Saving fuel and environment with intelligent speed adaptation[C]//Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America's 2008 Annual Meeting.Piscataway, NJ: IEEE Press, 2008.
|
| [4] |
PIERRE G S, EHRLICH J. Impact of intelligent speed adaptation systems on fuel consumption and driver behavior[J]. Journal of Biological Chemistry, 2008, 283(49): 34345-34351. DOI:10.1074/jbc.M806352200 |
| [5] |
LI M, BORIBOONSOMSIN K, WU G, et al. Traffic energy and emission reductions at signalized intersections:A study of the benefits of advanced driver information[J]. International Journal of Intelligent Transportation Systems Research, 2009, 7(1): 49-58. |
| [6] |
BARTH M, BORIBOONSOMSIN K. Energy and emissions impacts of a freeway-based dynamic eco-driving system[J]. Transportation Research Part D:Transport and Environment, 2009, 14(6): 400-410. DOI:10.1016/j.trd.2009.01.004 |
| [7] |
陈晓博. 发展自动驾驶汽车的挑战和前景展望[J]. 综合运输, 2016, 38(11): 9-13. CHEN X B. The study on the challenge and development prospect of automated vehicles[J]. Comprehensive Transportation, 2016, 38(11): 9-13. (in Chinese) |
| [8] |
SERVIN O, BORIBOONSOMSIN K, BARTH M.An energy and emissions impact evaluation of intelligent speed adaptation[C]//IEEE International Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2006: 1257-1262.
|
| [9] |
ZHENG S J, XU J M.Research on red wave and green wave coordinated control model in arterial road for different traffic demands[C]//Proceedings of 2011 International Conference on Multimedia Technology.Piscataway, NJ: IEEE Press, 2011: 1661-1664.
|
| [10] |
YANG Z Y, DING Z J.Actuated green wave control for grid-like network traffic signal coordination[C]//2016 IEEE International Conference on Systems, Man and Cybernetics.Piscataway, NJ: IEEE Press, 2016: 953-958.
|
| [11] |
LI X H, TAN G Z, CHEN C.Urban arterial road green-wave control based on genetic algorithm[C]//Proceedings of the 7th World Congress on Intelligent Control and Automation.Piscataway, NJ: IEEE Press, 2008: 3087-3092.
|
| [12] |
YE B L, WU W M, ZHOU X H, et al.A green wave band based method for urban arterial signal control[C]//Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control.Piscataway, NJ: IEEE Press, 2014: 126-131.
|
| [13] |
CHEN S Y, SUN J, YAO J.Development and simulation application of a dynamic speed dynamic signal strategy for arterial traffic management[C]//Proceedings of the 14th International IEEE Annual Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2011: 1349-1354.
|
| [14] |
林培群, 卓福庆, 姚凯斌, 等. 车联网环境下交叉口交通流微观控制模型及其求解与仿真[J]. 中国公路学报, 2015, 28(8): 82-90. LIN P Q, ZHUO F Q, YAO K B, et al. Solving and simulation of microcosmic control model of intersection traffic flow in connected-vehicle network environment[J]. China Journal of Highway and Transport, 2015, 28(8): 82-90. DOI:10.3969/j.issn.1001-7372.2015.08.011 (in Chinese) |
| [15] |
李鹏凯, 杨晓光, 吴伟, 等. 车路协同环境下信号交叉口车速引导建模与仿真[J]. 交通信息与安全, 2012, 30(3): 136-140. LI P K, YANG X G, WU W, et al. Modeling vehicle speed guidance at signal intersection under IntelliDriverSM[J]. Journal of Transport Information and Safety, 2012, 30(3): 136-140. DOI:10.3963/j.ISSN1674-4861.2012.03.031 (in Chinese) |
| [16] |
KUNDU S, KUNDU S.Flexible vehicle speed control algorithms for eco-driving[C]//IEEE 82nd Vehicular Technology Conference.Picsataway, NJ: IEEE Press, 2015: 1-5.
|
| [17] |
CHANG C C.Cooperative traffic control with driving efficiency optimization for multiple intersections based on vehicular networks[D].Hsinchu: National Chiao-Tung University, 2014.
|
| [18] |
ASADI B, VAHIDI A. Predictive cruise control:Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time[J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 707-714. DOI:10.1109/TCST.2010.2047860 |
| [19] |
RAKHA H, IEEE M, KAMALANATHAHARMA R K.Eco-driving at signalized intersections using V2I communication[C]//Proceedings of the 14th International IEEE Annual Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2011: 341-346.
|
| [20] |
XIA H, BORIBOONSOMSIN K, BARTH M. Dynamic eco-driving for signalized arterial corridors and its indirect network-wide energy/emissions benefits[J]. Journal of Intelligent Transportation Systems, 2013, 17(1): 31-41. DOI:10.1080/15472450.2012.712494 |
| [21] |
AHN K, RAKHA H, ASCE M, et al. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels[J]. Journal of Transportation Engineering, 2002, 128(2): 182-190. DOI:10.1061/(ASCE)0733-947X(2002)128:2(182) |
| [22] |
YANG H, RAKHA H, IEEE M, et al. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1575-1585. |
| [23] |
YI K S, CHUNG J T. Nonlinear brake control for vehicle CW/CA systems[J]. IEEE/ASME Transactions on Mechatronics, 2001, 6(1): 17-25. DOI:10.1109/3516.914387 |
| [24] |
RAKHA H, AHN K, TRANI A. Development of VT-micro model for estimating hot stabilized light duty vehicle and truck emi-ssions[J]. Transportation Research Part D:Transport and Environment, 2004, 9(1): 49-74. DOI:10.1016/S1361-9209(03)00054-3 |
| [25] |
AHN K.Microscopic fuel consumption and emission modeling[D].Blacksburg: Virginia Polytechnic Institute and State University, 1998.
|