



2. 北京航空航天大学 机械工程及自动化学院, 北京 100083;
3. 北京航空航天大学 高等理工学院, 北京 100083
2. School of Mechanical Engineering and Automation, Beijing University of Aeronautics and Astronautics, Beijing 100083;
3. Shenyuan Honors College, Beijing University of Aeronautics and Astronautics, Beijing 100083, China
自从20世纪初,莱特兄弟创造出了能够让人类实现翱翔于天际的梦想的飞机后,飞机的设计和相应的理论得到了极大发展,特别是给人类的交通运输方式带来了天翻地覆的变化。为了满足人类各领域的发展需要,各种创新式的飞机不断涌现,如为容纳更多旅客的大型客机,为满足高机动性的直升机,还有能够在水面起降的水上飞机等[1]。
在自然界中,水空两栖的生物比比皆是,如各种海鸟、飞鱼、飞行乌贼等,它们都是可以自如转换水空运动状态的典型生物,而这种由自然界进化而产生的特性,可以给人类的设计带来极大的参考价值,依据自然界已有的生物,研究和分析其机理从而进行结构设计是仿生学的重要内容。
起飞是所有飞行的关键,鸟类如何完成从地面(水面)到空中的转变,不仅对其自身的活动和生存至关重要,而且对研究鸟类从非飞行祖先的飞行进化史也至关重要。目前已知的飞鸟翅膀看起来是完整的、功能齐全的,与之相比较,同样体型结实、肌肉强劲的运动员却不能跃起在空中飞翔,原因在于鸟类拥有可以支持其飞行的强劲肌肉和翼型,以及特有的进化体型和运动方式。关于鸟类飞行的进化问题的争论已经存在了几十年了[2],即第一个飞起来的生物是如何支撑自己的体重,以及这一套机理是如何完成的。所有假设都赞成无论从地面、树木还是水面起飞的飞行进化场景,都必须处理地(水)对空过渡问题,但飞行鸟类的起飞机制在很大程度上是未知的。起跳的力量是如何产生的,目前在任何鸟类中都还是未知的;翅膀和后肢的相对定量耦合作用也并未进行过评估。考虑到鸟类的后肢不直接支持翼型,但是在大多数飞行物种中并没有减少或丢失,并且发展成现在常见的适合跳跃力学的三元四肢结构[3],可以推测它们可能会产生起飞所需的部分加速度。本文主要研究鸬鹚起飞过程中后肢脚蹼部分的力学建模和运动学分析验证。
1 生物后肢运动 1.1 后肢力在起飞力学中的作用Earls[4]通过高速摄像机和测力器研究欧洲琼鸟和鹌鹑在起飞过程中脚部贡献的速度,发现脚部在最初一个周期内产生80%~90%的起飞速度。Provini等[5]通过使用高速摄像机来观察珍珠鸟和钻石鸽,同时通过数字粒子图像示踪技术计算空气动力来测量由后肢产生的地面反作用力,结果发现在起飞后2个扑翼周期内2种鸟的后肢均贡献了绝大部分速度。Chen和Sun[6]通过研究蜂蝇快速起飞过程中的运动加速度,同时利用CFD仿真求出蜂蝇翅膀的空气动力,从而估算起飞过程中其腿部的作用力,发现起飞时腿部作用力为体重的3倍[6],结果如图 1所示。所以,后肢力在起飞过程起着非常重要的作用,对完全起飞前的加速和在空中平衡有很大的影响,因此本文研究十分有意义。
1.2 水鸟水面起飞
在自然界中,很多拥有飞行能力的水鸟在水面上起飞时都需要使用脚蹼不断拍击水面以获得足够的动量支撑其在水面上的运动和加速前进。如图 2所示,红喉潜鸟在水面上起飞时被观察到脚蹼会周期性地拍击水面,当滑行速度达到10 m/s时便可起飞,在此期间,脚蹼提供一部分前进加速度以及在水面上的一部分支持力[7];当鸭子躲避天敌或者搜寻食物时,也会采用这种脚蹼助推模式的运动,利用脚蹼和扑翼在水面上奔跑,以减小波浪阻力的影响[8];鸊鷉也是一种有类似行为模式的鸟类,其能在水上以10 Hz的频率奔跑,产生的升力能支撑55%的体重;鸬鹚是一种典型的水面短距起飞生物,体长0.84 m,全身密度为0.738 g/cm3, 翼载荷为1.58 g/cm2,脚掌载荷为25.3 g/cm2,翅膀和脚蹼的高频拍击运动使其助跑距离只需约5 m[9]。这些鸟类在水面上的运动模式相似,脚蹼拍水原理和脚蹼接触水后的变化过程有很大关联性[10]。

|
| 图 2 水鸟水面起飞 Fig. 2 Waterfowl taking-off from water surface |
对于目前的情况,除了蛇怪蜥蜴,对于定量分析大质量和大密度生物水上机理特性的研究还比较少,但是对蛇怪蜥蜴在水面行进的机理以及对其水动力学的分析理论已经发展了20年,从Glasheen和McMahon[11]在Nature上第一次提出完整的蛇怪蜥蜴脚蹼水动力模型,研究者对蛇怪蜥蜴的探究便不断深入。对于鸬鹚等水鸟,其与蛇怪蜥蜴有相似的运动特性和表现,利用这2种不同生物之间的共同点去定量分析鸬鹚脚蹼的水动力模型,便能够可靠地进行脚蹼力建模。
大型水面行走生物如蛇怪蜥蜴和水鸟,如果拥有足够大的接触面积,人也可以直接站立于水面。但蛇怪蜥蜴和水鸟的脚蹼面积并不足以支撑其仅依靠浮力和表面张力在水面上行走,通过大量对蛇怪蜥蜴的研究[12-14]发现,这一类生物通过脚蹼连续交替拍击水面来获得足够支持自身在重力方向上平衡的力。哈佛大学的Hsieh[15]在2003年利用高速摄像机记录了蛇怪蜥蜴的水面运动过程,并将其水上前进过程分为猛击、滑动、上挥、下挥4个步态;2004年,Hsieh和Lauder[13]通过PIV技术测量了蛇怪蜥蜴水上运动时的流场变化,并证明了蛇怪蜥蜴腿部垂直拍打水面时产生了最大的支撑力和推进力。如图 3、图 4所示[15],通过高速摄像机和PIV分析可知,蛇怪蜥蜴拍水的过程分为3个阶段:①拍水阶段,脚蹼垂直向下拍击水面,推动水体并远离水面,同时产生环绕脚蹼的空气腔。②划水阶段,当水被脚蹼向后推开时,脚蹼仍保持在空气腔内。③复位阶段,脚蹼在离开水面的附近产生一个反方向推进的涡环,表示将动量转移到流体中,该涡环直径为3 cm,周围水流向涡环中间,向下并与运行方向相反,在空气腔破碎前,脚蹼及时从水里抽出。


蛇怪蜥蜴在水面奔跑时,脚蹼中心速度约为2.5 m/s,脚蹼特征长度量级为10-2 m,其弗劳德数均在该范围内[16],约为7;鸬鹚脚蹼中心速度约为2~3 m/s,脚蹼特征长度约为12 cm[9],其弗劳德数范围为3~8。经过对比,蛇怪蜥蜴和鸬鹚在水面上运动的弗劳德数比较相近,所以这2种生物脚蹼在水面下的运动情况、空气腔状态和受力机理是相似的,因此可以通过分析蛇怪蜥蜴在水中的受力情况探讨鸬鹚脚蹼的水动力学建模。
由于鸬鹚和蛇怪蜥蜴在水中的运动轨迹相仿,所以研究蛇怪蜥蜴脚蹼中心在水中不同运动阶段的力学模型和依据对鸬鹚脚蹼动力学建模有很重要的意义。
2 鸬鹚脚蹼力学建模 2.1 鸬鹚脚蹼动力学模型Glasheen和McMahon[11]对蛇怪蜥蜴在水面上奔跑的行为进行了高速摄像机录像分析,在拍击过程中,脚蹼力的冲量可以被表示为

|
(1) |
式中:Islap、mvirual和upeak分别为拍水阶段脚蹼的冲量、脚蹼质量和脚蹼速度峰值。
如图 5所示,在划水过程中,水静态压力和水动态压力组成水阻力。水阻力在竖直方向分量的积分为关于划水时间的冲量:

|
| 图 5 划水阶段受力 Fig. 5 Force in stroke stage |

|
(2) |
式中:Drag(t)为水阻力;φ(t)为脚蹼与竖直方向的夹角。
在复位过程中,假设空气腔破裂前蛇怪蜥蜴的脚已经离开水面,因此竖直向下的力可以被忽略。Glasheen和McMahon[14]又根据低弗劳德数的圆盘垂直入水实验测出划水阻力的参数。弗劳德数是流体惯性力和重力的比值,用来表征部分淹没物体穿过水的阻力大小[17],其表达式为

|
(3) |
式中:u为物体在水中速度,m/s;g为重力加速度;l为与水接触特征长度,m。
当Fr=1~80时,圆盘在水中阻力表示为

|
(4) |
式中:Cd为阻力系数,约为0.703;ρ为水体密度,一般情况下为103 kg/m3;S为圆盘与水有效接触面积,m2;h(t)为物体在水中入水深度,m。
对于一个周期内的鸬鹚脚蹼拍水运动,其运动形式和弗劳德数均与蛇怪蜥蜴相近,因此假设Glasheen和McMahon[14]提出的水动力学方程式(4)对分析鸬鹚脚蹼水中运动受力同样适用。
根据式(4)中流体动力学项和流体静力学项进行分析,在流体动力学项0.5Sρu2中,u为脚蹼中心在水下各处运动轨迹速度,可分解为水平方向速度ux和竖直方向速度uy:

|
(5) |

|
(6) |
式中:uxr、uyr为鸬鹚脚蹼中心相对质心坐标系OXcYcZc的速度;ucx、ucy为质心在对地坐标系OXgYgZg中的速度。对于水下ux、uy不同状态时,水动力学假设与上相同。
考虑流体静力学项Sρgh(t),其本质为阿基米德浮力,方向始终竖直向上。因此,根据式(4),将脚蹼水动力在竖直和水平方向的分量分解如下:

|
(7) |

|
(8) |
根据观察发现[18-19],鸬鹚在水面起飞阶段,脚蹼拍击水面的频率与扑翼扑动的频率相等。与天鹅、鸊鷉、野鸭及红喉潜鸟[7-10]等其他水鸟起飞时双脚交替拍击水面不同,鸬鹚在起飞时,双脚随着扑翼下扑一齐拍击水面,其2条腿动作的节律和相位完全一样,可以视为运动参数、几何参数及受力情况完全相同的2个机构,在分析和研究时,只需要分析单腿的运动状态和受力情况。
2.2.1 鸬鹚腿部运动简化模型根据观察[18-19],鸬鹚的腿部运动在二维平面上拥有3个自由度,分别为髋关节、膝关节和踝关节。其中,髋关节角度为大腿和体轴夹角,膝关节角度为大腿和小腿夹角,踝关节角度为脚蹼平面和小腿夹角,如图 6所示。

|
| 图 6 鸬鹚腿部关节角度及简化模型D-H坐标系 Fig. 6 Cormorant's leg joint angle and simplified model D-H coordinate system |
在准备入水前,髋关节和膝关节角度θ1和θ2达到最大,入水后大腿和小腿同时向后蹬,最后出水时膝关节角度几乎为零,大腿和小腿保持在同一直线上出水。当脚蹼在水中时,由于水花阻挡且其处于水面下,所以无法观察到踝关节角度的变化,根据出入水瞬间踝关节角度为零以及鸬鹚在水池划水时踝关节角度为零,假设鸬鹚脚蹼中心水下轨迹近似等于踝关节角度为零时的脚蹼中心轨迹。但同时假设鸬鹚在每个时刻为获得最大水动力,脚蹼平面会主动改变平面角度以保持与脚蹼中心划水速度的垂直,从而获得每时刻的最大水动力。
脚蹼运动可以简化为一个二维二自由度三连杆模型。如图 7所示,三连杆中l1代表体轴,l2代表鸬鹚髋关节到膝关节的部分,l3代表鸬鹚膝关节到脚蹼中心的部分,l4代表体轴上髋关节到尾部的距离。

|
| 图 7 鸬鹚腿部模型机构简图 Fig. 7 Schematic diagram of cormorant leg model |
设定地面坐标系表示为OXgYgZg,鸬鹚质心坐标系为OXcYcZc,并且为基底坐标系,膝关节坐标系为OX1Y1Z1,脚蹼中心坐标系为OX2Y2Z2。
2.2.2 腿部D-H矩阵及雅可比矩阵分析已知腿部各关节角度值,若要解析当前脚蹼中心位置,则需要分析简化模型的D-H转换。根据建立的坐标系,D-H矩阵参数由表 1表示。
| 序号 | 关节角θ | 连杆偏距d | 连杆长度a | 连杆转角α |
| 1 | π+δ+θ1 | 0 | D2 | 0 |
| 2 | π-θ2 | 0 | D3 | 0 |
| 注:序号1、2表示髋关节与膝关节的D-H转换关系。 | ||||
根据表 1和D-H变换矩阵,可列出相邻两关节之间的坐标转换关系式cT1和1T2。因此,脚蹼质心坐标和脚蹼中心坐标的总转换矩阵为cT2=cT11T2,表达式如下:
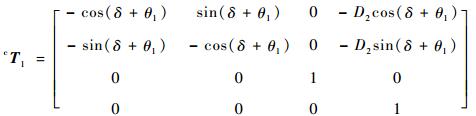
|
(9) |
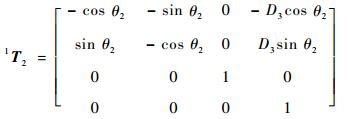
|
(10) |

|
(11) |
假设脚蹼中心在OXcYcZc坐标系中的坐标为(X, Y, Z),在OX2Y2Z2坐标系中的坐标为(0, 0, 0),则由转换矩阵可得
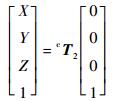
|
(12) |
即

|
(13) |
由式(13)求解鸬鹚脚蹼中心和关节角度的逆问题,表达式如下:
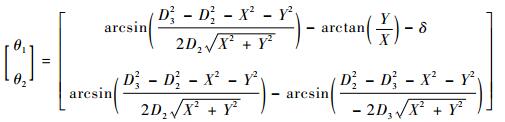
|
(14) |
按照式(14)可求得鸬鹚脚蹼中心及其关节运动的正变换和逆变换。通过生物运动捕捉[20],获得鸬鹚脚蹼关节角度值随时间变化的数据,通过D-H矩阵可以转化成鸬鹚脚蹼中心在质心坐标系中的坐标,从而计算和分析脚蹼中心在水下的速度和位移曲线,为脚蹼力计算提供输入量。
研究鸬鹚脚蹼中心运动时,其速度是对水动力影响的关键因素,所以依据雅可比矩阵可以求解出各关节速度和脚蹼中心速度的关系,下面是本文采用解析方法求解脚蹼中心雅可比矩阵的具体思路。

|
(15) |
对于二维平面内二自由度的关节和位移运动,根据雅可比矩阵定义[21]方法求
|
(16) |
则可根据式(16)求出鸬鹚脚蹼中心和关节的雅可比矩阵:

|
(17) |
通过雅可比矩阵,可根据关节角速度值解算出脚蹼中心速度,从而有效解算各类误差。
3 鸬鹚脚蹼运动学分析验证针对已有的鸬鹚视频资料进行生物运动学捕捉,通过对捕获到的关键点的坐标进行有效的数据处理方法,获得目标运动参数。分别对鸬鹚脚部关键关节角度值、鸬鹚的水平位移和竖直位移进行数据捕捉实验,再获得以上值在对应时段每时刻数组后,绘制相应轨迹图和时间图,讨论鸬鹚水面起飞特点。
3.1 腿部关节角度值的捕捉由于鸬鹚水面起飞过程持续时间较短且难以观测,往往不易被高速摄像机捕捉或记录。但是可以根据已有的鸬鹚起飞瞬间的慢速视频来对鸬鹚髋关节和膝关节部位的运动进行分析和截取。根据现有影视资料[18-19],其拍摄帧率为150帧/s,每帧时间为1/150 s。基于MATLAB的图形轨迹捕获软件,通过对视频解析并将其分割成图片帧来进行每帧轨迹点的捕获,软件允许在同一帧内捕获多点或者连续多帧持续追踪一点,但软件的直接测量是某点相对于边界坐标系的坐标,所以鸬鹚的关节角度值只能通过间接测量的方式求出。在第2节已知鸬鹚的脚蹼运动可视为二维平面内的三连杆运动,髋关节角度值θ1为体轴l1与大腿l2的夹角,膝关节角度值θ2为大腿l2与小腿l3的夹角,可以通过向量内积的性质及反余弦函数来测量5个周期内的角度值。为了能够完整求解2个角度值,需要进行以下5个点的捕捉,各点的相对位置如图 8所示,相应的计算后处理如表 2所示。

|
| 图 8 鸬鹚捕捉点标记 Fig. 8 Tag of cormorant's capture points |
| 测量值 | 横坐标表示 | 纵坐标表示 |
| A | xA | yA |
| B | xB | yB |
| C | xC | yC |
| D | xD | yD |
| E | xE | yE |
| θ1 |  |
|
| θ2 |  |
|
| 注:dot和norm在MATLAB中分别表示点乘和取模的函数。 | ||
输出数据经过这种方法求出后,可初步分析出θ1和θ2 5个运动周期内的变化曲线,如图 9所示。

|
| 图 9 髋关节和膝关节角度值拟合 Fig. 9 Fitting of angle of hip joint and knee joint |
拟合结果为:
根据当前插值得到鸬鹚腿部关节角度值数据,以及式(11)和式(17)的D-H转换矩阵和雅可比矩阵计算可得鸬鹚脚蹼中心相对质心坐标系的轨迹,如图 10所示。可以明显看出,鸬鹚脚蹼中心运动轨迹与蛇怪蜥蜴有尺度上的缩放关系,所以进一步说明了这类水上奔跑生物的机理非常相近。

|
| 图 10 脚蹼中心轨迹 Fig. 10 Center trajectory of webbed-foot |
捕捉鸬鹚在5个周期内竖直方向和水平方向的运动轨迹[18-19],因为捕捉值为直接测量值,所以不需要经过间接计算得到。但是实际位移大小和视频中截取到的位移大小存在等比例缩放,所以需要先对视频进行标定,明确缩放比例尺。然后以鸬鹚喙尖为捕捉点,并以鸬鹚在水面上留下的水平划痕为参考水平线,进行竖直方向位移的捕捉。由于鸬鹚在水平方向移动距离较大,所以视频拍摄镜头在鸬鹚准备超出边界时跟随鸬鹚身体移动,已知拍摄地点距离鸬鹚较远,同时摄像机镜头移动不明显,视野广角移动较小,所以将摄像机视野角移动视为无影响。鸬鹚在水平方向的移动以喙尖为捕捉点,且以鸬鹚在水面上拍击产生的水花中心为参考坐标系,计算鸬鹚在每一帧内与最近周期内产生水花的距离,同时捕捉最近周期产生的水花与该周期处上一周期产生的水花之间的距离,最后将数据进行叠加处理。为有效减少各种人为误差带来的影响,进行5次运动轨迹捕捉,最后求取数据计算平均值。
正常成年鸬鹚的平均身长为84 cm[9],以此身体长度数据为标准,在视频轨迹捕捉中,每一帧分别标定头和尾部两点A和B,并计算两点距离|lAB|,求取比例尺k,其表达式如下:

|
(18) |
相关参数表示如表 3所示。
因为位移量是长度量,所以可直接通过坐标计算再经比例缩放求得。竖直位移量的计算需要对3点A、M、N进行捕捉,其中A表示鸬鹚喙尖坐标点,M、N表示鸬鹚水面路径方向上两点。竖直位移量实际上是喙尖坐标点到水面路径的垂直距离,采用点到直线距离公式求解,相关参数表示如表 4所示。表中:Sv为竖直方向位移。
| 测量值 | 横坐标表示 | 纵坐标表示 |
| A | xA | yA |
| M | xM | yM |
| N | xN | yN |
| Sv |  |
|
利用参考系变换的差值计算方式求解水平方向的位移,对每帧图像中出现的水花中心进行捕捉,表示为点X1, X2, …, Xn,同时捕捉鸬鹚喙尖坐标点A。在每帧图像中,标记距离当前喙尖最近的水花中心点Xi(i = 1, 2, …, n),对于5个周期内每时刻鸬鹚起飞水平方向位移表示为
|
(19) |
式中:dj为第j个水花中心与第j-1个水花中心的水平距离;di为当前鸬鹚喙尖与当前水花中心点Xi的水平距离。
相关参数表示如表 5所示。
| 测量值 | 横坐标表示 | 纵坐标表示 |
| A | xA | yA |
| X1 | x1 | y1 |
| X2 | x2 | y2 |
| | | |
| Xn | xN | yN |
| Sh |  |
|
为防止较大误差产生,对同一范围图像帧多次取值,共捕捉5次数据,在最后计算时求平均值,以减小误差值。根据捕捉结果计算绘制了鸬鹚竖直和水平位移-时间曲线、鸬鹚运动轨迹竖直-水平位移曲线,如图 11所示。

|
| 图 11 鸬鹚竖直、水平位移-时间曲线及运动轨迹竖直-水平位移曲线 Fig. 11 Vertical, horizontal displacement-time curve and vertical-horizontal displacement curve of cormorant |
可以看出,鸬鹚在5个周期内的水平移动距离达到5 m,平均速度约为6.5 m/s,其在竖直方向的位移在固定高度上波动,在起飞期间周期内,扑翼力在竖直方向上产生的动量不足以抵消重力,脚蹼力在其中为支撑鸬鹚身体保持在水面平稳前进有一定贡献。
4 结论为研究如何设计跨海空航行器以使其在水面上能够较短时间内成功起飞,依据仿生学理论,研究类似水空两栖生物的起飞机理。鸬鹚具有密度大、体重比一般水鸟重(约为3 kg),且羽毛吸水性较强的特性,在一定程度上与要设计研发的跨海空航行器有很大的共通性,同时鸬鹚在水面上起飞的性能十分优越,其可以在几秒内快速起飞,所以选择鸬鹚作为研究对象具有很大潜在价值。而要参考自然界生物的特性,需对其运动过程中的机理有明确的认识,才能设计出符合实际鸬鹚起飞效果的仿生样机。
本文从后肢力重要性及对比不同生物水上行走机理引出大型水上奔跑生物的水动力产生机理及此类生物之间运动的相似性,通过对蛇怪蜥蜴脚蹼力的研究和模型分析,推算鸬鹚水面起飞的脚蹼力动力学模型;针对鸬鹚腿部的简化模型进行D-H转换矩阵和雅可比矩阵分析,从而得到鸬鹚腿部关节角度值与脚蹼运动中心的位移和速度的运动学模型,为之后验证模型提供运动学转换模块。
针对现有鸬鹚水面起飞运动视频进行分析,并对鸬鹚腿部关节角度值、水平位移和竖直位移进行数据捕捉和处理,为今后的仿真模型验证提供了可供验证的输入输出数据。由分析可知,鸬鹚在5个拍动周期内的水平移动距离达到5 m,平均速度约为6.5 m/s,其在竖直方向的位移在固定高度上波动,说明在起飞期间周期内扑翼力在竖直方向上产生动量不足以抵消重力,脚蹼力在其中为支撑鸬鹚身体保持在水面平稳前进有一定贡献。
致谢 感谢北京航空航天大学机器人研究所ITR智能技术与机器人研究中心。
| [1] |
YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft:Aquatic unmanned aerial vehicle (AquaUAV)[J]. Progress in Aerospace Sciences, 2015, 74: 131-151. DOI:10.1016/j.paerosci.2014.12.005 |
| [2] |
PADIAN K, CHIAPPE L M. The origin and early evolution of birds[J]. Biological Reviews, 1998, 73(1): 1-42. DOI:10.1017/S0006323197005100 |
| [3] |
ALEXANDER R M N. Leg design and jumping technique for humans, other vertebrates and insects[J]. Philosophical Transactions of the Royal Society of London B:Biological Sciences, 1995, 347(1321): 235-248. DOI:10.1098/rstb.1995.0024 |
| [4] |
EARLS K D. Kinematics and mechanics of ground take-off in the starling Sturnis vulgaris and the quail Coturnix coturnix[J]. Journal of Experimental Biology, 2000, 203(4): 725-739. |
| [5] |
PROVINI P, TOBALSKE B W, CRANDELL K E, et al. Transition from leg to wing forces during take-off in birds[J]. Journal of Experimental Biology, 2012, 215(23): 4115-4124. DOI:10.1242/jeb.074484 |
| [6] |
CHEN M W, SUN M. Wing/body kinematics measurement and force and moment analyses of the takeoff flight of fruitflies[J]. Acta Mechanica Sinica, 2014, 30(4): 495-506. DOI:10.1007/s10409-014-0059-0 |
| [7] |
NORBERG R Å, NORBERG U M. Take-off, landing, and flight speed during fishing flights of Gavia stellata (Pont.)[J]. Ornis Scandinavica, 1971, 2(1): 55-67. DOI:10.2307/3676239 |
| [8] |
GOUGH W T, FARINA S C, FISH F E. Aquatic burst locomotion by hydroplaning and paddling in common eiders (Somateria mollissima)[J]. Journal of Experimental Biology, 2015, 218(11): 1632-1638. DOI:10.1242/jeb.114140 |
| [9] |
XUE X, ZHAO X, HUANG J, et al.Experiments and analysis of cormorants' density, wing loading and webbed feet loading[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 83-87. http://ieeexplore.ieee.org/document/7866302/
|
| [10] |
CLIFTON G T, HEDRICK T L, BIEWENER A A. Western and Clark's grebes use novel strategies for running on water[J]. Journal of Experimental Biology, 2015, 218(8): 1235-1243. DOI:10.1242/jeb.118745 |
| [11] |
GLASHEEN J W, MCMAHON T A. A hydrodynamic model of locomotion in the basilisk lizard[J]. Nature, 1996, 380(6572): 340-342. DOI:10.1038/380340a0 |
| [12] |
BUSH J W M, HU D L. Walking on water:Biolocomotion at the interface[J]. Annual Review of Fluid Mechanics, 2006, 38: 339-369. DOI:10.1146/annurev.fluid.38.050304.092157 |
| [13] |
HSIEH S T, LAUDER G V. Running on water:Three-dimensional force generation by basilisk lizards[J]. Proceedings of the National Academy of Sciences of the United States of America, 2004, 101(48): 16784-16788. DOI:10.1073/pnas.0405736101 |
| [14] |
GLASHEEN J W, MCMAHON T A. Vertical water entry of disks at low Froude numbers[J]. Physics of Fluids, 1996, 8(8): 2078-2083. DOI:10.1063/1.869010 |
| [15] |
HSIEH S T. Three-dimensional hindlimb kinematics of water running in the plumed basilisk lizard (Basiliscus plumifrons)[J]. The Journal of Experimental Biology, 2003, 206(23): 4363-4377. DOI:10.1242/jeb.00679 |
| [16] |
FLOYD S, KEEGAN T, PALMISANO J, et al.A novel water running robot inspired by basilisk lizards[C]//2006 IEEE/RSJ International Conference on/Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2006: 5430-5436. http://ieeexplore.ieee.org/document/4059292/
|
| [17] |
WHITE F M. Fluid mechanics[M]. 4th ed. New York: McGraw-Hill, 1999.
|
| [18] |
Bunch of cormorants enjoying the lake water[EB/OL].(2016-09-24).https://www.youtube.com/watch?v=ULJKKoO-JNs.
|
| [19] |
鸬鹚活动记录[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs. Cormorant's activity record[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs(in Chinese). |
| [20] |
HUANG J, GONG X, WANG Z, et al.The kinematics analysis of webbed feet during cormorants' swimming[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 301-306.
|
| [21] |
蔡自兴. 机器人学[M]. 北京: 清华大学出版社, 2000. CAI Z X. Robotics[M]. Beijing: Tsinghua University Press, 2000. (in Chinese) |