



欺骗干扰采用虚假的目标信息作用于雷达的目标检测和跟踪系统,使雷达不能正确地检测到真实目标,从而达到迷惑和扰乱雷达的目的[1]。其中,速度欺骗干扰[2-4]作为一种常见的欺骗干扰类型,通过产生与目标回波多普勒频率不同的若干个干扰信号频率,使雷达难以检测到目标多普勒频率,从而造成雷达检测跟踪的错误。速度欺骗干扰的大量使用对雷达检测带来极大的挑战,所以,雷达抗速度欺骗干扰是目前雷达抗干扰领域急需解决的关键问题。
目前,国内外学者在干扰环境下的目标检测方面做了大量研究。文献[5-6]通过真假目标多普勒频率变化特征的差异,对速度欺骗干扰进行识别;文献[7]基于回波信号熵特征进行有源欺骗干扰的恒虚警率(CFAR)检测;文献[3, 8]利用认知的方法分析目标和干扰的特征,并据此设计脉间相位编码波形,达到对抗速度欺骗干扰的目的。上述文献从信号层入手对抗速度欺骗干扰进行了研究,但是随着干扰机的信号处理能力不断增强,总会有高逼真度的虚假目标信号通过信号层的识别和阻断,进入数据处理环节,因此如何在数据层识别干扰并保持真实目标稳定跟踪是必须面对的难题。
贲德院士[9]提出利用雷达距离量测变化率求得对应的多普勒信息,并将其与实际的多普勒量测进行比对,以识别速度欺骗干扰,其奠定了从数据层识别速度欺骗干扰的基础;文献[10]基于文献[9]的思想,提出一种基于双模型(Double Models, DM)和幅度辅助信息的速度欺骗干扰下目标跟踪技术,实现了真实目标的稳定跟踪。上述文献从数据层入手对速度欺骗干扰进行了研究,但均未针对目标机动运动时的情况进行充分考虑,导致对机动目标的跟踪误差较大。
针对上述问题,本文以真实目标自身携带干扰机施放速度多假目标欺骗干扰且目标进行机动的情况为研究背景,提出了基于速度信息、位置信息的双通道机动检测[11-12]和速度估计径向投影的雷达抗速度多假目标欺骗干扰技术,通过数据层处理实现了干扰情况下对真实目标的跟踪。
1 问题分析和算法流程 1.1 问题分析由于本文通过数据层处理来对抗速度欺骗干扰,因此仅对速度欺骗干扰的数据层特征进行分析。如图 1所示,速度多假目标欺骗干扰是在与真实目标相近的方向线上产生多个虚假目标回波,其距离信息与真实目标相近,方位、俯仰信息与真实目标相近,并且每个虚假目标的回波中含有与各自运动状态相匹配的多普勒信息,同时为了欺骗雷达的速度跟踪系统,真实目标回波中含有虚假的多普勒信息。

|
| 图 1 速度多假目标欺骗干扰示意图 Fig. 1 Schematic of speed-multiple-false-target deception interference |
根据以上分析可知,面临的问题主要有以下几个方面:①虚假目标具有与其运动状态匹配的多普勒信息,采用径向速度比对的方法对虚假目标进行识别将难以奏效;②若目标自身携带干扰机施放自卫式干扰[13-14],如何识别真实目标径向速度量测的真伪;③若目标发生机动,此时速度欺骗干扰的识别是否可靠,若不可靠,将如何处理。
1.2 算法流程针对1.1节的问题,本文的解决思路如下:利用目标回波所含有的距离和角度信息对目标进行滤波跟踪,同时启动速度-位置信息双通道机动检测方法控制跟踪模型的切换并判别目标跟踪的稳定性,若判定目标跟踪稳定则采用速度估计径向投影的方法构造检验统计量,识别速度欺骗干扰,并根据识别结果决定速度量测的取舍。总体思路如图 2所示。

|
| 图 2 跟踪算法框图 Fig. 2 Block diagram of tracking algorithm |
点迹的距离和角度量测包含目标的真实位置信息,但其速度信息是否真实可用尚需检验,另外目标为了有效摆脱跟踪,很可能在进行速度欺骗干扰的同时进行机动,因此还需要进行机动检测和机动跟踪模型的切换。如何在目标机动且可能施放速度欺骗干扰的情况下尽量利用好目标的速度量测信息,并保持目标的跟踪稳定,这是本文要解决的重点问题。
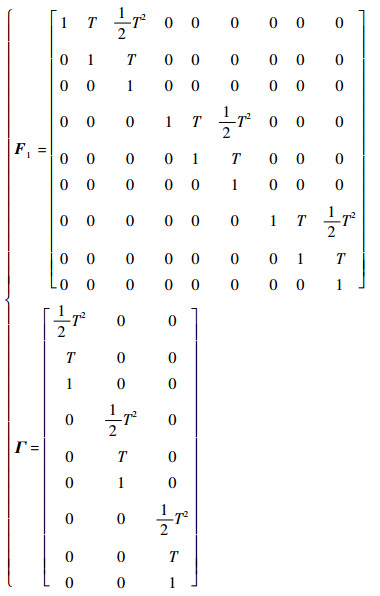
2.1 机动检测在雷达上报点迹后,首先需对其进行机动检测。设雷达上报的点迹集合为Ω,其中的元素为极坐标量测(r, θ, φ, vr),r为目标的距离量测,θ为方位角量测,φ为俯仰角量测,vr为径向速度量测。雷达位置坐标为(XR, YR, ZR),非机动目标的状态方程为匀加速直线运动方程:

|
(1) |
式中:v(k)为零均值高斯过程噪声,其协方差为Q;X(k)为k时刻状态向量,表示为

|
(2) |
|
(3) |
其中:T为雷达扫描周期。
包含径向速度量测的极坐标量测方程为

|
(4) |
式中:Z1(k)为量测向量,表示为

|
(5) |

|
(6) |
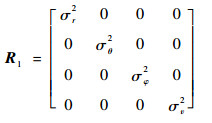
W1(k)为量测误差向量,其协方差矩阵表示为
|
(7) |
其中:σr2、σθ2、σφ2、σv2分别为雷达的距离、方位角、俯仰角、径向速度的量测误差方差。
不包含径向速度量测的极坐标量测方程为

|
(8) |
式中:W2(k)的协方差矩阵为R2,即为从式(5)~式(7)中去除速度所对应的元素即可,此处不再给出具体表达式。由于量测方程的非线性较强,本文采用不敏卡尔曼滤波(UKF)进行滤波和估计,具体的滤波算法可参考文献[15]。
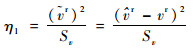
根据状态方程式(1)和量测方程式(4)对目标量测进行预测,而后利用获得的实际量测与量测预测值构建检验统计量,依此对目标是否发生机动进行判断。本文采用速度-位置信息双通道机动检测的方法,即分别利用径向速度量测、距离-方位-俯仰量测构造2个检验统计量对是否机动做出判断。需要注意的是:与位置信息相比,利用速度信息进行机动检测更为敏感。速度机动检测的检验统计量为
|
(9) |
式中:为了表述方便, 省略了时间标识;

|
(10) |
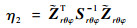
式中:Srθφ为目标距离、方位、俯仰的新息协方差矩阵;η2服从自由度为3的χ2分布;

|
(11) |
其中:
速度机动检测有3方面作用:①若目标确实进行了机动,可以根据机动检测结果进行模型切换,以保证不丢失目标和跟踪的连续稳定;②若目标没有进行机动,而是开始施放速度欺骗干扰,在干扰开始的时刻由于速度量测会突然偏离预测值,因此速度机动检测器通常也会将其判断为目标发生了机动,此时速度机动检测器又发挥了早期识别速度欺骗干扰的作用;③若目标既进行机动,又施放速度欺骗干扰,那么速度机动检测器同样会做出发生机动的判断。根据以上3方面的分析,当速度机动检测判断目标存在机动时,很可能是由速度欺骗干扰造成的,但目标也可能存在机动而导致跟踪误差增大,此时采用速度估计径向投影方法很难得到准确的判断,因此本文采取相对保守的做法,即放弃速度量测信息,仅用位置量测信息进行滤波跟踪,虽然目标可能并没有施放速度欺骗干扰,但是此处损失了速度量测信息最多会影响到目标的跟踪精度,并不会因为跟踪回路引入虚假速度信息而导致滤波发散。
如果上一时刻判断目标既没有发生机动,也没有速度欺骗干扰,则根据速度机动检测的结果对其进行相应后续的机动状态判断、速度欺骗干扰识别等处理,此处之所以将速度机动检测结果作为启动后续处理步骤的控制量是基于以下2点考虑:①由于上一时刻判断目标没有机动和速度欺骗干扰,滤波器基于非机动模型和距离、方位、俯仰、速度四维量测进行滤波跟踪,如果在本时刻目标机动的同时施放速度欺骗干扰,而基于位置信息的机动检测灵敏度相对较差,若没能及时识别出机动的存在,计数器继续累加1,并且仍然采用非机动滤波模型进行目标的状态估计,导致跟踪模型失配,使状态估计方差增大,而上一时刻目标处于非机动、无速度欺骗干扰的状态,因此计数器数值N一定是超过门限L的,从而会进入速度欺骗干扰识别的环节,而此时状态估计方差的增大会使速度欺骗干扰的正确识别率降低,虚假的速度信息很可能进入跟踪环节,此时在模型失配和速度欺骗的双重作用下,会引起较大的目标跟踪误差,甚至导致发散。②虽然利用速度量测信息进行机动检测会存在相对较高的“虚警概率”,如果检测到发生机动会首先排除速度量测,确保虚假的速度量测信息不会进入跟踪回路,同时切换到机动跟踪模型(本文采用Singer模型),这样最多会使跟踪误差有一定增大,但通常不会导致跟踪发散的后果。
若上一个时刻判断目标的状态并不是没有机动和速度欺骗干扰,而是速度欺骗干扰、机动+速度欺骗干扰、机动三者之一,此时的机动判断则采用基于位置量测的机动检测,主要有以下2点原因:①由于在目标发生机动或机动刚刚结束跟踪误差还比较大的时刻进行速度欺骗干扰识别,其误判率往往较高,因此本文采用计数器对目标机动检测的结果进行积累,如果连续L个时刻判定没有发生机动,则启动速度欺骗干扰识别模块,判断是否存在速度欺骗干扰,因此机动判断的结果不但直接关系到下一步跟踪状态模型的切换,而且影响到速度量测信息的取舍,对于上一时刻存在速度欺骗干扰、机动+速度欺骗干扰2种情况,由于速度欺骗干扰的影响,若继续采用基于速度量测的机动检测方法,且目标仍然施放速度欺骗干扰,那么就仍然会被判断为存在机动,对于机动+速度欺骗干扰的情况尚无影响,但是对于仅存在速度欺骗干扰的情况,会导致目标施放干扰期间跟踪单元始终在采用机动模型进行跟踪,不但计算量较大,而且跟踪误差也有所增大,且导致计数器无法启动,从而始终不能进入速度欺骗干扰识别的环节,这显然是不合适的,因此必须采用基于位置量测的机动检测方法。②对于仅存在机动的情况,速度欺骗干扰已经结束的可能性较大,应当尽快进入速度欺骗干扰识别环节,若判定没有速度欺骗干扰则可以将速度量测信息尽早引入到跟踪回路,而基于速度量测的机动检测方法“虚警率”较高,计数器达到门限需要较长时间积累,使速度欺骗干扰识别迟迟不能启动,因此影响到跟踪效果,所以应当采用基于位置量测的机动检测。
2.2 机动目标跟踪模型在检测到目标发生机动时,将跟踪模型由式(1)的匀加速运动模型切换到Singer模型进行滤波跟踪,状态方程为

|
(12) |
式中:F2为状态转移矩阵,表示为
|
(13) |
|
(14) |
其中:α为机动时间常数。
过程噪声

|
(15) |

|
(16) |
式中:σm2为机动加速度方差,表示为
|
(17) |
其中:aM为加速度极大值;pM为加速度取极大值的概率;p0为非机动的概率。
矩阵
|
进行速度欺骗干扰识别不但可以对敌方的干扰态势做出判断,而且在判断出干扰停止的情况下可以利用真实速度量测信息提高目标的跟踪精度,由于在机动时刻进行干扰识别的误判率较高,所以本文在计数器超过一定门限后再启动干扰识别,以提高正确识别率。首先利用目标的距离、方位、俯仰量测得到目标速度估计,进而求得其在径向上的投影,即径向速度估计,然后将其与径向速度量测进行对比,构造检验统计量,达到识别速度欺骗干扰的目的。
设k时刻采用式(8)量测方程得到目标速度估计矢量V为
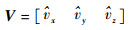
|
(18) |
其位置估计为
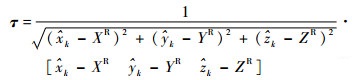
|
(19) |
则有V在τ方向上的投影为
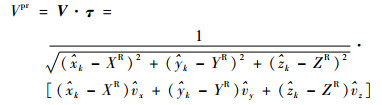
|
(20) |
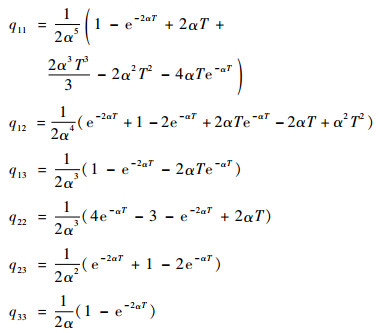
其方差为
|
(21) |
式中:Pk′为k时刻位置和速度估计的协方差矩阵。设k时刻的状态估计协方差矩阵为P,则Pk′的表达式为
|
(22) |
式中:Pij为矩阵P中的第i行、第j列的元素。
|
(23) |
|
(24) |
|
(25) |
|
(26) |
|
(27) |
|
(28) |
设k时刻雷达对目标径向速度量测为vk,雷达的测速误差方差为σv2,则有近似服从自由度为1的χ2分布检验统计量Δk:
|
(29) |
据此可得速度欺骗干扰判别准则如下。
存在速度欺骗干扰:

|
(30) |
不存在速度欺骗干扰:

|
(31) |
式中:Gβ为判决门限,β为显著性水平。
3 速度多假目标欺骗干扰下目标跟踪算法根据第2节分析,结合图 2得到速度多假目标欺骗干扰下的机动目标跟踪算法流程如下:
步骤1 首先进行点-航迹关联,并进行量测更新。
步骤2 若目标上一时刻的状态为既不存在机动,也不存在速度欺骗干扰,则进入步骤3,否则,进入步骤12。
步骤3 启动基于速度信息的机动检测方法,识别目标的运动状态,若不存在机动则进入步骤4,若存在机动则进入步骤11。
步骤4 计数器累加N=N+1,比较N与门限L的大小,若N≤L,进入步骤5,若N>L,进入步骤6。
步骤5 仅利用输入的距离、方位、俯仰量测,采用非机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为非机动、速度欺骗干扰未知,返回步骤1。
步骤6 仅利用输入的距离、方位、俯仰量测,采用非机动模型进行滤波跟踪,根据输出结果,估计各雷达中的径向速度Vipr,并计算其方差。
步骤7 利用Vipr及各雷达的径向速度量测vki构造检验统计量Δ,选取显著性水平β,确定判决门限Gβ。
步骤8 若Δ≥Gβ,则判定存在速度欺骗干扰,进入步骤9;若Δ < Gβ,则判定不存在速度欺骗干扰,进入步骤10。
步骤9 将步骤5的估计结果作为输出,同时确定该时刻目标的状态为非机动、存在速度欺骗干扰,返回步骤1。
步骤10 利用输入的距离、方位、俯仰和速度量测,采用非机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为非机动、不存在速度欺骗干扰,返回步骤1。
步骤11 将计数器置零,N=0,利用输入的距离、方位、俯仰量测,采用机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为机动、速度欺骗干扰未知,返回步骤1。
步骤12 启动基于位置信息的机动检测方法,识别目标的运动状态,若不存在机动则进入步骤13,若存在机动则进入步骤20。
步骤13 计数器累加N=N+1,比较N与门限L的大小,若N≤L,进入步骤14,若N>L,进入步骤15。
步骤14 仅利用输入的距离、方位、俯仰量测,采用非机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为非机动、速度欺骗干扰未知,返回步骤1。
步骤15 仅利用输入的距离、方位、俯仰量测,采用非机动模型进行滤波跟踪,根据输出结果,估计各雷达中的径向速度Vipr,并计算其方差。
步骤16 利用Vpr及各雷达的径向速度量测vk构造检验统计量Δk,选取显著性水平β,确定判决门限Gβ。
步骤17 若Δk≥Gβ,则判定存在速度欺骗干扰,进入步骤18;若Δk < Gβ,则判定不存在速度欺骗干扰,进入步骤19。
步骤18 将步骤15的估计结果作为输出,同时确定该时刻目标的状态为非机动、存在速度欺骗干扰,返回步骤1。
步骤19 利用输入的距离、方位、俯仰和速度量测,采用非机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为非机动、不存在速度欺骗干扰,返回步骤1。
步骤20 将计数器置零,N=0,利用输入的距离、方位、俯仰量测,采用机动模型进行滤波跟踪,输出估计结果,并确定该时刻目标的状态为机动、速度欺骗干扰未知,返回步骤1。
4 仿真分析对本文算法剔除速度欺骗干扰的能力和真实目标跟踪精度进行分析,并将本文算法与文献[7]中提出的DM算法进行比较分析。
4.1 仿真条件1) 雷达初始参数设置
设雷达测距精度为100 m,方位、俯仰角测量精度为0.3°,径向速度测量精度为1 m/s。机动跟踪模型中机动频率
2) 机动目标参数设置
运动过程共分为6个运动阶段,第1、6阶段目标保持匀速运动不发生机动,第2~5阶段目标发生机动,具体如表 1所示。
| 运动阶段序号 | 持续时间段/s |
X方向加速度/ (m·s-2) |
Y方向加速度/ (m·s-2) |
Z方向加速度/ (m·s-2) |
| 1 | 0~65 | 0 | 0 | 0 |
| 2 | 66~88 | -20 | 20 | 10 |
| 3 | 89~117 | 20 | -10 | 10 |
| 4 | 118~136 | -20 | 10 | 10 |
| 5 | 137~160 | 30 | -20 | -10 |
| 6 | 161~246 | 0 | 0 | 0 |
4.2 机动目标跟踪性能分析
1) 不同测距精度下的性能分析
改变雷达的测距精度,使其分别取值100、300、500 m,得到动目标跟踪精度的仿真结果如图 3和图 4所示。可见,雷达测距精度对目标位置跟踪误差和Y方向速度估计误差影响较大;同时,图 3和图 4中的每个曲线都存在一些起伏,较明显的起伏为7个(图 3中雷达测距精度100 m曲线的最右边起伏不明显),这些起伏主要是由模型间的切换所造成的,其中第1个起伏时刻大约在第16 s左右,第7个起伏大约在第200 s左右,这2个时刻正对应着速度欺骗干扰的起始和结束时刻,由于本文算法在进行速度欺骗干扰识别之前首先要进行机动检测,而速度欺骗干扰的启动和结束均会造成速度量测的突变,因此在利用速度量测信息进行机动检测时很容易将其误判为机动并进行模型切换,造成位置、速度估计误差的增大,而第2~6个起伏则是由目标的真实机动所造成。

|
| 图 3 雷达测距精度对目标位置跟踪误差的影响 Fig. 3 Influence of radar ranging accuracy on target position tracking error |

|
| 图 4 雷达测距精度对目标速度估计误差的影响 Fig. 4 Influence of radar ranging accuracy on target velocity estimation error |
在目标径向速度量测偏差30 m/s的条件下,雷达取不同测距精度得到干扰的正确剔除率,结果如图 5所示。在雷达测距精度为100 m时曲线的起伏较小,而测距精度降低到300 m和500 m时曲线会有明显的起伏,并且与目标的机动时刻相对应,这是因为本文算法在检测到目标发生机动时会强制剔除速度量测信息,同时目标的跟踪误差增大,在经过若干个延迟后收敛程度还不能保证对速度欺骗干扰的准确识别,从而造成了速度欺骗干扰剔除率的下降。不同测距精度下目标真实速度信息的误剔除率如图 6所示。可见,误剔除率对雷达测距精度的变化并不敏感,3条曲线几乎重合,图中出现5个“突变”,其中第1处的“突变”是由航迹起始误差较大造成的误判,之后的4处“突变”是由于检测到目标机动并强制剔除速度信息而造成的。

|
| 图 5 雷达测距精度对速度欺骗干扰正确剔除率的影响 Fig. 5 Influence of radar ranging accuracy on correct elimination rate of velocity deception interference |

|
| 图 6 雷达测距精度对真实速度信息误剔除率的影响 Fig. 6 Influence of radar ranging accuracy on wrong elimination rate of true velocity information |
2) 不同方位角测量精度下的性能分析
其他仿真条件不变,改变雷达的方位角测量精度,分别取0.1°、0.3°、0.5°得到目标位置跟踪误差曲线如图 7和图 8所示。当方位角测量精度从0.1°降低到0.5°时,目标位置跟踪误差的增加幅度较大,而速度估计误差的变化相对较小,同时图 7和图 8中的曲线也存在着与目标机动、速度欺骗干扰起止所对应的起伏;同样得到速度欺骗干扰正确剔除率、真实速度信息误剔除率的变化曲线如图 9和图 10所示。图 9中的曲线也存在一定起伏,但与图 6中的起伏相比要微小得多。

|
| 图 7 方位角测量精度对目标位置跟踪误差的影响 Fig. 7 Influence of azimuth measurement accuracy on target position tracking error |

|
| 图 8 方位角测量精度对目标速度估计误差的影响 Fig. 8 Influence of azimuth measurement accuracy on target velocity estimation error |

|
| 图 9 方位角测量精度对速度欺骗干扰正确剔除率的影响 Fig. 9 Influence of azimuth measurement accuracy on correct elimination rate of velocity deception interference |

|
| 图 10 方位角测量精度对真实速度信息误剔除率的影响 Fig. 10 Influence of azimuth measurement accuracy on wrong elimination rate of true velocity information |
3) 不同俯仰角测量精度下的性能分析
改变雷达的俯仰角测量精度得到目标的跟踪误差曲线如图 11和图 12所示。与图 7相比可以发现,当俯仰角测量精度在0.1°~0.5°变化时,目标位置跟踪误差变化较大;图 11目标位置跟踪误差相对较大,是由目标机动所造成的;从图 12~图 14可见,俯仰角测量精度对其他仿真结果影响相对较小。

|
| 图 11 俯仰角测量精度对目标位置跟踪误差影响 Fig. 11 Influence of elevation angle measurement accuracy on target position tracking error |

|
| 图 12 俯仰角测量精度对目标速度估计误差的影响 Fig. 12 Influence of elevation angle measurement accuracy on target velocity estimation error |

|
| 图 13 俯仰角测量精度对速度欺骗干扰正确剔除率的影响 Fig. 13 Influence of elevation angle measurement accuracy on correct elimination rate of velocity deception interference |

|
| 图 14 俯仰角测量精度对真实速度信息误剔除率的影响 Fig. 14 Influence of elevation angle measurement accuracy on wrong elimination rate of true velocity information |
4) 不同测速精度下的性能分析
仿真初始条件不变,分析雷达测速精度为1、10、15 m/s时本文算法的跟踪性能,由图 15可见,雷达测速精度越高, 目标跟踪的位置误差越小,发生机动后收敛的速度越快,干扰停止后也能够获得更高的跟踪精度。一方面原因是较高的测速精度提高了速度量测数据的质量,使估计精度提高;另一方面,较高的测速精度能够使虚假速度信息的正确剔除率更高,当测速精度为15 m/s时,每次机动都会导致虚假速度剔除率大幅下降,使虚假速度信息以更高的概率进入跟踪单元,降低跟踪精度甚至引起发散。其他仿真结果如图 16~图 18所示,测速精度对其影响相对较小。

|
| 图 15 雷达测速精度对目标位置跟踪误差的影响 Fig. 15 Influence of radar velocity measurement accuracy on position tracking error |

|
| 图 16 雷达测速精度对目标速度估计误差的影响 Fig. 16 Influence of radar velocity measurement accuracy on target velocity estimation error |

|
| 图 17 雷达测速精度对速度欺骗干扰正确剔除率的影响 Fig. 17 Influence of radar velocity measurement accuracy on correct elimination rate of velocity deception interference |

|
| 图 18 雷达测速精度对真实速度信息误剔除率的影响 Fig. 18 Influence of radar velocity measurement accuracy on wrong elimination rate of true velocity information |
本节仿真将文献[7]基于DM的跟踪算法与本文算法进行比较,仿真初始条件不变,蒙特卡罗次数为300,仿真实验结果如图 19所示。当目标不发生机动时,2种算法的性能相当,但是在目标发生机动且尚未重新恢复稳定的时段中,DM算法的跟踪误差远远超过了本文算法。

|
| 图 19 本文算法与DM算法比较 Fig. 19 Comparison of proposed method with DM algorithm |
本文针对速度多假目标欺骗干扰在雷达数据层的具体特征,提出了相应的欺骗干扰识别和虚假信息剔除方法。主要结论包括:
1) 通过基于速度、位置量测信息的双通道机动检测方法,解决了干扰环境下机动目标检测准确性下降的问题。
2) 通过目标运动状态计数延迟的方法,保证了速度欺骗识别的可靠性。
3) 通过基于速度估计径向投影的速度欺骗干扰识别方法,解决了目标在机动时段速度估计误差大、识别错误率高的问题,并利用基于速度量测机动检测方法对速度欺骗干扰的敏感性,保证了剔除速度虚假信息的及时性。
| [1] |
赵国庆.
雷达对抗原理[M]. 2版 西安: 西安电子科技大学出版社, 2012.
ZHAO G Q. Radar countermeasures[M]. 2nd ed Xi'an: Xidian University Press, 2012. (in Chinese) |
| [2] |
莫翠琼, 李加海, 戴幻尧, 等. 速度欺骗干扰对反舰PD导引头的相干视频仿真[J].
系统仿真学报, 2015, 27 (5): 1024–1029.
MO C Q, LI J H, DAI H Y, et al. Velocity deception jamming analysis of coherent video simulation of anti-ship PD seeker[J]. Journal of System Simulation, 2015, 27 (5): 1024–1029. (in Chinese) |
| [3] |
吴健, 崔国龙, 孔令讲. 一种抗速度欺骗干扰的认知波形设计方法[J].
雷达科学与技术, 2015, 13 (2): 133–138.
WU J, CUI G L, KONG L J. A cognitive waveform design approach against velocity deception jamming[J]. Radar Science and Technology, 2015, 13 (2): 133–138. (in Chinese) |
| [4] |
孙殿星, 王国宏, 贺达超, 等. 雷达组网抗距离-速度欺骗复合干扰技术研究[J].
现代防御技术, 2016, 44 (3): 84–90.
SUN D X, WANG G H, HE D C, et al. Antijamming technique in the presence of range-velocity deceptipn compound jamming based on radar network[J]. Modern Defence Technology, 2016, 44 (3): 84–90. (in Chinese) |
| [5] |
左家骏, 彭世蕤, 郁春来. 基于单站无源定位的抗自卫式欺骗干扰方法[J].
空军预警学院学报, 2014, 28 (4): 250–253.
ZUO J J, PENG S R, YU C L. Anconfronting self-screening deception jamming based on single-observer passive location[J]. Journal of Air Force Early Warming Academy, 2014, 28 (4): 250–253. (in Chinese) |
| [6] |
单凉, 张剑云, 周青松. 基于多普勒的欺骗干扰识别方法[J].
航天电子对抗, 2016 (2): 37–39.
SHAN L, ZHANG J Y, ZHOU Q S. A method to identify the deception jamming based on Doppler[J]. Aerospace Electronic Warfare, 2016 (2): 37–39. (in Chinese) |
| [7] |
卢云龙, 李明, 陈洪猛, 等. 基于熵特征的DRFM有源欺骗干扰CFAR检测[J].
系统工程与电子技术, 2016, 38 (4): 732–738.
LU Y L, LI M, CHEN H M, et al. CFAR detection of DRFM deception jamming based on entropy feature[J]. Systems Engineering and Electronics, 2016, 38 (4): 732–738. (in Chinese) |
| [8] | ZHANG J. New antivelocity deception jamming technique using pulses with adaptive initial phases[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49 (2): 1290–1300. DOI:10.1109/TAES.2013.6494414 |
| [9] |
贲德. 机载脉冲多普勒(PD)雷达的工作特点及抗干扰措施[J].
现代雷达, 2000, 22 (4): 1–6.
BEN D. The property of airborne pulsed Doppler radar and the methods of counter countermeasures[J]. Modern Radar, 2000, 22 (4): 1–6. (in Chinese) |
| [10] |
李迎春, 王国宏, 关成斌. 速度拖引干扰和杂波背景下脉冲多普勒雷达目标跟踪算法[J].
电子与信息学报, 2015, 37 (4): 989–992.
LI Y C, WANG G H, GUAN C B. Algorithm for target tracking with pulse Doppler radar in the presence of velocity gate pull off/in jamming and clutter environment[J]. Journal of Electronics & Information Technology, 2015, 37 (4): 989–992. DOI:10.11999/JEIT140856 (in Chinese) |
| [11] |
卢再奇, 樊建鹏, 刘伟, 等. 集成多普勒观测的目标机动检测算法[J].
系统工程与电子技术, 2013, 35 (1): 1–8.
LU Z Q, FAN J P, LIU W, et al. Target maneuver detection algorithm integrated with Doppler measurement[J]. Systems Engineering and Electronics, 2013, 35 (1): 1–8. (in Chinese) |
| [12] |
颜世刚, 石章松. 基于迭代端点拟合辅助的目标机动检测方法[J].
舰船科学技术, 2014, 36 (4): 123–125.
YAN S G, SHI Z S. Target maneuver detection method with iterative endpoint fitting assisted[J]. Ship Science and Technology, 2014, 36 (4): 123–125. (in Chinese) |
| [13] |
陈津津, 付孝龙. 机载自卫式电子干扰对抗技术研究[J].
飞航导弹, 2016 (6): 50–54.
CHEN J J, FU X L. Research on airborne confrontation techno-logy of airborne self-defense[J]. Aerodynamic Missile Journal, 2016 (6): 50–54. (in Chinese) |
| [14] |
刘灜, 徐佳婧, 苏伟, 等. 基于有源/无源融合的雷达抗欺骗干扰方法研究[J].
舰船电子对抗, 2016, 39 (6): 19–26.
LIU Y, XU J J, SU W, et al. Research into radar anti-deception jamming method based on active and passive fusion[J]. Shipboard Electronic Countermeasure, 2016, 39 (6): 19–26. (in Chinese) |
| [15] |
孙殿星, 王国宏, 李迎春, 等. 距离多假目标干扰下低可观测目标跟踪处理[J].
电子学报, 2016, 44 (4): 826–837.
SUN D X, WANG G H, LI Y C, et al. Low observable target tracking processing in the presence of multi-range-false-target jamming[J]. Journal of Electronics, 2016, 44 (4): 826–837. (in Chinese) |