



2. 北京交通大学 载运工具先进制造与测控技术教育部重点实验室, 北京 100044
2. Key Laboratory of Vehicle Advanced Manufacturing, Measuring and Control Technology, Ministry of Education, Beijing Jiaotong University, Beijing 100044, China
航天器在上升和再入太空阶段受到巨大的气动加热效应,为保证飞行员安全和机载仪器正常运转,需在航天器的外部铺设防热层结构[1]。目前航天器防热层结构通常采用正六边形蜂窝板结构[2-3],通过对蜂窝结构进行防热材料灌注来实现热防护的功能[4-5]。
由于蜂窝结构和防热层材料的特殊性,国内外防热层灌注多采用人工进行,但该灌注方式效率较低,随着中国航天器的发展,球冠面的外形尺寸逐渐变大,人工灌注方式无法满足防热材料灌注的需求,因此,需要提出一种满足要求的灌注机器人。
由于球冠面外形尺寸较大,灌注装置末端需携带负载,要求灌注机器人具有较大的工作空间和较高的刚度。串联机器人因其工作空间大、操作灵活、响应速度快等优点在工业生产方面得到了广泛的应用,例如,PUMA[6]、SCARA[7]和IRB[8]等工业机器人,但串联机器人同时具有刚度小的缺点。而与传统的串联机器人相比,具有复杂结构的并联机器人具有许多明显的优势,例如,高刚度、高精度、高承载能力和误差积累小等优点[9-12],并应用于并联机床[13-14]、喷涂机器人[15]、微操作机器人[16]和力传感器[17]等方面,但并联机器人同时具有工作空间小的缺点。因此,对于灌注机器人来说,单纯的串联机器人和并联机器人都无法完全满足灌注要求。结合以上2种机器人的优点,串并混联机器人可以最大程度地满足航天器防热材料灌注要求。
本文提出一种用于防热层灌注的串并混联机器人,该机器人的工作空间能够覆盖整个球冠面。通过采用被动支链,使得并联机构具有较高的刚度。建立了并联机构的模型,对机构进行了运动学分析,通过约束分析绘制了并联机构的工作空间,在雅可比矩阵的基础上建立了并联机构的刚度模型,利用遗传算法,以工作空间和全局刚度为指标对并联机构的参数进行多目标优化分析。优化结果大大提高了并联机构的刚度和工作空间,能够满足防热层灌注的要求。
1 机构描述如图 1(a)所示系统主要由3PSS-PU并联机构、圆形导轨和蜂窝转台组成,其中3PSS-PU并联机构可在圆形导轨上运动,蜂窝转台可绕自身转动, 通过沿导轨和转台的自转使得灌注机构末端操作器能够到达整个蜂窝球冠面。本文重点对3PSS-PU并联机构进行分析,如图 1(b)所示机构由定平台、动平台以及连接定平台和动平台的3个完全相同的主动支链PSS和1个被动支链PU组成,主动支链均匀的分布在定平台上,每个主动支链依次由移动(P)副、球(S)副和球(S)副组成,每个P副由直线电机驱动;被动支链由P副和虎克铰(U)副组成,U副与动平台相连接。由于每条主动支链自由度为6,对动平台不提供约束,所以动平台和中间被动支链具有相同的自由度数,即动平台具有沿x轴和y轴的转动自由度以及沿z轴的移动自由度。

|
| 图 1 串并混联灌注机器人系统 Fig. 1 Serial-parallel perfusion robot system |
如图 2所示为3PSS-PU机构运动简图,其中B1、B2、B3分别代表 3个移动副,动平台上3个球副分别由M1、M2、M3表示,与P副相连的3个球副分别由N1、N2、N3表示,固定坐标系O-XbYbZb建立在定平台的中心点O,轴线Xb沿导轨


|
| 图 2 3PSS-PU机构运动简图 Fig. 2 Kinematic sketch of 3PSS-PU mechanism |
由图 2可得,φi和ϕi参数之间的关系表示如下:
|
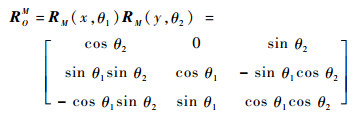
定义θ1和θ2分别为动平台绕x轴和y轴的转角。
因此,可得出动坐标系相对于定坐标系的旋转矩阵:
|
(1) |
式中:RM(x, θ1)为绕x轴旋转θ1的旋转矩阵; RM(y, θ2)为绕y轴旋转θ2的旋转矩阵。
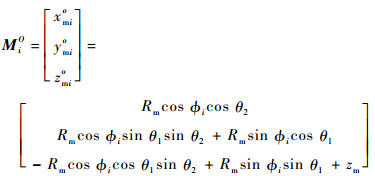
定义zm为动平台沿z轴方向上的坐标,动坐标系原点M在定坐标系下的坐标MO可以表示为

|
(2) |
Mi在动坐标系下的坐标MiM可以表示为

|
(3) |
因此,Mi在定坐标系下的坐标MiO可以表示为
|
(4) |
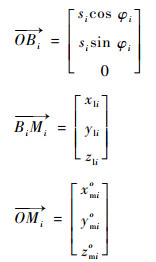
已知输出构件的位姿,求解输入构件的位置称为机构的运动学反解。由图 2可得,第i个支链的封闭矢量方程可以表示为

|
(5) |
式中:
|
其中:si(i=1~3)为每个移动副移动的距离;xli、yli、zli分别为向量
将式(4)代入式(5)可得
|
(6) |
式中:Axi=Rmcos ϕicos θ2; Bxi=-cos φi; Ayi=Rmcos ϕisin θ1sin θ2+Rmsin ϕicos θ1; Byi=-sin φi; Azi=-Rmcos ϕicos θ1sin θ2+Rmsin ϕisin θ1+zm; Bzi=0。
根据杆长条件可得
|
(7) |
将式(6)代入式(7)可得

|
(8) |
式中:
|
|
因此,由式(8)中可得出运动学反解:

|
(9) |
由于

|
(10) |
对式(10)两边分别对xmio、ymio和zmio求偏导数,可得

|
(11) |
通过对式(11)整理可得
|
(12) |
式中:λmi=ylisin φi+xlicos φi。
对式(4)两边同时对时间求偏导数可得
|
(13) |
式中:
|
联立方程式(12)和方程式(13)可得
|
(14) |
式中:xm和ym分别为动平台沿x轴和y轴方向上的坐标;Jp为仅有3条主动支链组成机构的雅可比矩阵:
|
如图 3所示,建立了每个运动副的局部坐标系,因此可得
|
(15) |

|
| 图 3 中间被动支链各运动副的局部坐标系 Fig. 3 Local coordinate system of every kinematic pair of middle passive link |
式中:a4i为旋转矩阵A10A21…Aii-1的第3列元素,a40=[0 0 1]T,Aii-1为从第i个坐标系到第i-1个坐标系的旋转矩阵,同时位置矢量可表示为

|
(16) |
其中:b41=[0 0 zm]T;b42=[0 0 0]T;b43=[0 0 0]T。
因此,对于中间约束支链,可得
|
(17) |
将方程式(17)代入方程式(14),可求出并联机构的整体雅可比矩阵:

|
(18) |
式中:
根据机构的特点,影响机构工作空间的主要因素有:移动副移动的距离、杆的长度以及连杆分别与定平台和动平台的夹角。其中,移动副移动距离的约束是限制机构工作空间的主要因素。
因此,移动副的相应约束可表示为
|
(19) |
式中:simin和simax分别为移动副的最小和最大位移。
定义主动连杆与动平台之间的夹角为αi,其中杆件的半径忽略不计,故其约束条件可表示为

|
(20) |
式中:αimin和αimax分别为αi的最小值和最大值。

|
定义主动连杆与定平台之间的夹角为βi,故其约束条件可表示为
|
(21) |
式中:βimin和βimax分别为βi的最小值和最大值。
3PSS-PU并联机构结构参数和相关的变量如表 1所示,通过以下参数和以上约束条件,可计算出并联机构在笛卡儿坐标系下的工作空间,如图 4(a)所示, 图 4(b)和图 4(c)分别为工作空间的右视图和左视图。
| 参数 | 数值 |
| Rm/mm | 250 |
| li/mm | 220 |
| φ1/(°) | 60 |
| ϕ1/(°) | 60 |
| simin/mm | 0 |
| simax/mm | 450 |
| αimin/(°) | 50 |
| αimax/(°) | 120 |
| βimin/(°) | 50 |
| βimax/(°) | 120 |

|
| 图 4 3PSS-PU并联机构的工作空间及其左、右视图 Fig. 4 Workspace of 3PSS-PU parallel mechanism and its right and left side views |
为了分析机构在运动过程中刚度的变化趋势,需建立刚度模型,假定整个系统为刚性,得出如下表达式[18]:

|
(22) |
式中:
ε=[τ1 τ2 Fm]T为作用在末端操作器上的力(τ1、τ2)和力矩(Fm)向量;


|
(23) |
式中:k11、k22和k33为纯刚度,代表动平台在同一方向上力或力矩受变形的影响,在刚度矩阵中,这3个参数最重要,即其他参数可以忽略不计,k11, k22的单位为N·mm/rad,k33的单位为N/mm。
当θ1或θ2为定值时,k22在θ2方向上随着θ2、zm或θ1、zm变化的刚度分布如图 5和图 6所示。随着zm的增大,刚度都逐渐变大,当zm=140 mm时,刚度达到最大值,当zm为常数时,刚度值不随θ2或θ1的变化而变化。

|
| 图 5 k22在θ2方向上随着θ2和zm变化的刚度分布(θ1=0.3 rad) Fig. 5 Stiffness distribution of k22 along θ2 with change of θ2 and zm (when θ1=0.3 rad) |

|
| 图 6 k22在θ2方向上随着θ1和zm变化的刚度分布(θ2=0.3 rad) Fig. 6 Stiffness distribution of k22 along θ2 with change of θ1 and zm (when θ2=0.3 rad) |
图 7为zm=210 mm时,k22在θ2方向上随着θ1和θ2的变化的刚度分布图, 刚度随着θ1和θ2的增大逐渐变小,当θ1=0.35 rad时,刚度达到最小值。

|
| 图 7 k22在θ2方向上随着θ1和θ2变化的刚度分布(zm=210 mm) Fig. 7 Stiffness distribution of k22 along θ2 with change of θ1 and θ2 (when zm=210 mm) |
优化问题主要由目标函数和约束条件两部分组成[19-20]。目标函数主要包括2个:全局刚度和工作空间。对于全局刚度,由于刚度矩阵中对角线上的主元素k11、k22、k33分别对θ1、θ2、zm上的刚度影响比较大,主要通过这几个刚度值来衡量全局刚度的大小。对于工作空间,可用工作空间内散点的个数来更衡量其大小,避免了复杂的推导过程,同时达到了优化的目的。
全局刚度E可以被描述为

|
(24) |
为区分2个优化目标的收敛曲线,定义以下优化目标函数:

|
(25) |
式中:W为工作空间体积的目标函数;ei和wi分别为第i个性能指标。
结合约束条件,给出优化参数的尺寸约束范围:
|
(26) |
同时,在优化过程中为保证刚度取值在工作空间之内,应对限制工作空间的参数进行约束
|
(27) |
基于遗传算法对3PSS-PU并联机构进行多目标优化,优化的各项参数为:优化代数G为100,群数为20。通过编程计算,得出图 8所示的目标函数优化曲线,图中展示了从0~100代的遗传运算的过程。由图 8(a)可看出60代以后,全局刚度值曲线趋于平稳; 图 8(b)中工作空间散点曲线从40代以后趋于平稳,此时,全局刚度和工作空间散点数都达到最大。如表 2所示,列举了第100代中20组机构的优化设计参数值。

|
| 图 8 目标函数收敛图 Fig. 8 Convergence graph of objective function |
| 组数 | 机构设计参数 | |||
| Rm/mm | li/mm | φ1/rad | ϕ1/rad | |
| 1 | 266.608 0 | 237.058 5 | 0.676 7 | 0.687 6 |
| 2 | 269.573 9 | 237.284 5 | 0.634 9 | 0.733 3 |
| 3 | 270.356 9 | 236.858 3 | 0.634 9 | 0.733 3 |
| 4 | 267.452 5 | 237.519 3 | 0.676 7 | 0.687 6 |
| 5 | 269.551 9 | 237.284 3 | 0.634 9 | 0.733 3 |
| 6 | 269.551 9 | 237.284 3 | 0.676 7 | 0.687 6 |
| 7 | 267.452 5 | 237.519 3 | 0.676 7 | 0.687 6 |
| 8 | 267.199 7 | 237.557 2 | 0.634 9 | 0.733 3 |
| 9 | 266.526 2 | 237.056 6 | 0.634 9 | 0.733 3 |
| 10 | 269.573 4 | 237.284 4 | 0.634 9 | 0.733 3 |
| 11 | 270.347 2 | 236.971 9 | 0.676 7 | 0.687 6 |
| 12 | 267.452 5 | 237.519 3 | 0.634 9 | 0.733 3 |
| 13 | 269.551 7 | 237.284 3 | 0.634 9 | 0.733 3 |
| 14 | 269.329 7 | 237.303 0 | 0.676 7 | 0.687 6 |
| 15 | 270.355 1 | 236.848 2 | 0.634 9 | 0.733 3 |
| 16 | 269.562 5 | 237.280 2 | 0.634 9 | 0.733 3 |
| 17 | 269.414 6 | 237.272 3 | 0.676 7 | 0.687 6 |
| 18 | 267.473 7 | 237.515 3 | 0.676 7 | 0.687 6 |
| 19 | 270.339 5 | 236.969 1 | 0.634 9 | 0.733 3 |
| 20 | 267.452 5 | 237.519 3 | 0.634 9 | 0.733 3 |
为了从20组设计参数中选出一组参数取值,此处采用机构体积最小的原则进行选取,该并联机构的体积公式近似表示为

|
(28) |
由式(28)可知,当si取最大值400mm时,机构的体积最大, 此时机构的体积公式可转化为

|
(29) |
把以上20组参数值代入式(29)对比可得,第9组参数优化值的机构体积最小,因此,取该组参数作为最终优化的设计参数值,整理后列出优化参数前后的对比值,如表 3所示, θ1=θ2=0.34 rad,zm=120 mm时,优化前后的刚度对比值如表 4所示,倍数为优化值与初始值的比值,S为散点数。
| 设计参数 | 初始值 | 优化值 |
| Rm/mm | 250 | 267 |
| li/mm | 220 | 237 |
| φ1/rad | π/3 | 0.63 |
| ϕ1/rad | π/3 | 0.73 |
| 刚度参数 | 初始值 | 优化值 | 倍数 |
| k11 | 1 272.95 | 4 023.15 | 3.160 |
| k22 | 6.244 17×107 | 1.102 13×108 | 1.765 |
| k33 | 9.851 90×105 | 9.015 62×106 | 9.151 |
| E | 6.342 81×107 | 1.192 33×108 | 1.880 |
| S | 929 775 | 1 069 132 | 1.150 |
通过以上对于全局刚度和工作空间的优化可以得出,优化后的机构的刚度和工作空间都变大,在一定条件下,优化后的全局刚度值是初始值的1.880倍,优化后工作空间的散点数是初始值的1.150倍。
5 结论1) 提出了一种用于防热层材料灌注的新型3PSS-PU并联灌注机器人,采用被动支链的约束方式,提高了机构的刚度,并通过圆形导轨增大了动平台的工作空间。
2) 建立了并联灌注机构的约束方程,进行了运动学分析,在机构参数约束条件下绘制了机构的工作空间,并在雅可比矩阵的基础上建立了机构的刚度模型。
3) 以全局刚度和工作空间为指标,基于遗传算法对机构进行多目标参数优化,并提出以工作空间内散点的数目来衡量工作空间体积大小,最终给出优化后机构尺寸参数, 为蜂窝灌注机器人应用奠定基础。
| [1] | ACKERMAN P K, BAKER A L, NEWQUIST C W. Thermal protection system: US 5322725[P]. 1994-06-21. |
| [2] | WU D F, ZHOU A F, ZHENG L M, et al. Study on the thermal protection performance of superalloy honeycomb panels in high-speed thermal shock environments[J]. Theoretical & Applied Mechanics Letters, 2014, 4 (2): 19–26. |
| [3] |
程文礼, 袁超, 邱启艳, 等. 航空用蜂窝夹层结构及制造工艺[J].
航空制造技术, 2015, 476 (7): 94–98.
CHENG W L, YUAN C, QIU Q Y, et al. Honeycomb sandwich structure and manufacturing process in aviation industry[J]. Aeronautical Manufacturing Technology, 2015, 476 (7): 94–98. (in Chinese) |
| [4] |
张纪奎, 马志阳, 李学梅, 等. 带防热层复合材料锥壳热固化变形的数值模拟[J].
北京航空航天大学学报, 2013, 39 (8): 1037–1041.
ZHANG J K, MA Z Y, LI X M, et al. Numerical simulation of cure deformation of composite taper shell with thermal protection layer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39 (8): 1037–1041. (in Chinese) |
| [5] |
郑力铭, 吴大方, 王岳武, 等. 金属蜂窝板高温环境下的隔热性能试验与计算[J].
北京航空航天大学学报, 2012, 38 (6): 731–735.
ZHENG L M, WU D F, WANG Y W, et al. Experiment and numerical simulation on heat-shielding properties of metallic honeycomb panel in high temperature environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38 (6): 731–735. (in Chinese) |
| [6] | LEE C S G, ZIEGLER M. Geometric approach in solving inverse kinematics of PUMA robots[J]. IEEE Transactions on Aerospace & Electronic Systems, 1984, 20 (6): 695–706. |
| [7] | OMODEI A, LEGNANI G, ADAMINI R. Three methodologies for the calibration of industrial manipulators:Experimental results on a SCARA robot[J]. Journal of Robotic Systems, 2000, 17 (6): 291–307. DOI:10.1002/(ISSN)1097-4563 |
| [8] | NUBIOLA A, BONEV I A. Absolute calibration of an ABB IRB 1600 robot using a laser tracker[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29 (1): 236–245. DOI:10.1016/j.rcim.2012.06.004 |
| [9] | FANG Y F, TSAI L W. Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures[J]. International Journal of Robotics Research, 2002, 21 (9): 799–810. DOI:10.1177/0278364902021009314 |
| [10] |
房海蓉, 方跃法, 郭胜. 四自由度对称并联机器人结构综合方法[J].
北京航空航天大学学报, 2005, 31 (3): 346–350.
FANG H R, FANG Y F, GUO S. Structural synthesis method for 4-degrees-of-freedom symmetrical parallel manipulators[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31 (3): 346–350. (in Chinese) |
| [11] |
张克涛, 方跃法, 房海蓉. 基于变胞原理的一种探测车机构设计与分析[J].
北京航空航天大学学报, 2007, 33 (7): 838–841.
ZHANG K T, FANG Y F, FANG H R. Design and analysis of a rover mechanism based on the metamorphic principle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33 (7): 838–841. (in Chinese) |
| [12] | PASHKEVICH A, CHABLAT D, WENGER P. Stiffness analysis of over-constrained parallel manipulators[J]. Mechanism & Machine Theory, 2009, 44 (5): 966–982. |
| [13] | GAO Z, ZHANG D. Performance analysis, mapping, and multi-objective optimization of a hybrid robotic machine tool[J]. IEEE Transactions on Industrial Electronics, 2015, 62 (1): 423–433. DOI:10.1109/TIE.2014.2327008 |
| [14] | GAO F, PENG B, ZHAO H, et al. A novel 5-DOF fully parallel kinematic machine tool[J]. The International Journal of Advanced Manufacturing Technology, 2006, 31 (1): 201–207. |
| [15] |
陈友东, 季旭东, 汤伟. 管道喷涂机器人:结构与位姿调整[J].
北京航空航天大学学报, 2015, 41 (2): 209–215.
CHEN Y D, JI X D, TANG W. Pipeline spraying robot:Structure and pose adjustment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41 (2): 209–215. (in Chinese) |
| [16] |
于靖军, 毕树生, 宗光华, 等. 面向生物工程的微操作机器人机构型综合研究[J].
北京航空航天大学学报, 2001, 27 (3): 356–360.
YU J J, BI S S, ZONG G H, et al. Research on type synthesis of micromanipulation mechanisms for bioengineering[J]. Journal of Beijing University of Aeronautics and Astronautics, 2001, 27 (3): 356–360. (in Chinese) |
| [17] | KIM G S, SHIN H J, YOON J. Development of 6-axis force/moment sensor for a humanoid robot's intelligent foot[J]. Sensors & Actuators A Physical, 2008, 2 (3): 122–133. |
| [18] | CHI Z, ZHANG D, XIA L, et al. Multi-objective optimization of stiffness and workspace for a parallel kinematic machine[J]. International Journal of Mechanics and Materials in Design, 2013, 9 (3): 281–293. DOI:10.1007/s10999-013-9219-9 |
| [19] | KONAK A, COIT D W, SMITH A E. Multi-objective optimization using genetic algorithms:A tutorial[J]. Reliability Engineering & System Safety, 2006, 91 (9): 992–1007. |
| [20] | HUANG H Z, QU N J, ZUO N M J. A new method of system reliability multi-objective optimization using genetic algorithms[C]//Proceedings of Reliability and Maintainability Symposium. Piscataway, NJ: IEEE Press, 2006: 278-283. |