



2. 南京晓庄学院 信息工程学院, 南京 211171
2. School of Electronic Engineering, Nanjing Xiaozhuang University, Nanjing 211171, China
机动飞行是指作战飞机根据任务需求、战场环境等作出的快速改变飞行姿态的飞行行为[1-2]。随着战场复杂化,无人机向高机动性发展已成为不可避免的趋势。一般而言,机动动作是三维空间内的复杂飞行状态,为了研究方便,在控制器设计研究中,通常用二维空间的机动动作组合表示三维空间的机动飞行动作[3-5]。具有机动飞行能力的无人机可以执行更多的作战任务、提高战场生存力,如规避地面防空打击、执行快速移动目标跟踪、拦截巡航导弹、舰上着陆等。
飞翼无人机的机动飞行主要面临两大困难:操纵能力不足和机动飞行条件下的控制律设计。近年来,矢量控制技术和控制设计方法的发展为以上两大困难的解决提供了可能。在提高操纵能力方面,矢量控制技术是最有效的解决方式。除了传统的机械矢量控制方式,新兴起的流体矢量控制技术对于中小型无人机来说更具优势。根据试验结果,和机械喷管相比,流体矢量喷管的优点包括:矢量装置重量减少24%~80%;发动机推质比提高7%~12%;成本和维护费用降低37%~53%;由于流体矢量喷管形状固定没有转动机构,减小了雷达散射截面[6-10]。工程应用方面,英国“恶魔”(Demon)无人技术验证机于2010年9月17日成功首飞。该无人机仅依靠喷射气流完成了升降和转向控制。这架无人机成为英国民航管理局(CAA)首次批准并且正式认定“无襟翼飞行”(flapless flight)飞行器。此次试飞成功,对于射流控制技术的实用化具有重大意义。
在控制方面,飞翼无人机具有复杂的耦合性、非线性、非定常、迟滞效应、不确定扰动等问题,使得飞翼无人机的机动飞行控制系统设计面临困难[11-13]。机动飞行飞行状态的快速改变和迟滞效应等使其并不存在典型的平衡状态,这在理论上动摇了传统线性控制方法的基础[13-15]。近年来,非线性控制理论的发展为无人机机动飞行特定环境下的控制律设计的发展开辟了道路。文献[16-21]研究了粒子群优化(PSO)算法,为非线性优化设计提供了可能。文献[22-28]研究非线性控制方法在工程实践的应用问题。从上述文献可知,应用动态逆方法为代表的非线性控制理论,解决飞行器机动飞行控制问题的方案已得到广大学者和工程设计人员的高度重视并得到了充分发展和实践。
根据本文采用流体矢量动力的飞翼无人机特定的研究对象,在大迎角机动飞行时除同样存在非线性、非定常及强耦合等问题外,还存在发动机喷流和气动耦合、不可建模部分和扰动的影响,使得无人机的外流畅更加复杂。因此,需要针对该特定的研究对象研究具有强鲁棒性的系统设计方法,以保证系统在各种飞行状态和扰动情况下的鲁棒稳定性和期望的飞行品质。因此,本文采用内外回路分别设计以实现不同控制目的的设计思路。
本文研究重点是飞翼无人机的控制器设计方法。因此,对流体矢量发动机的特性只作简要的介绍,并在该发动机满足控制要求的前提下开展设计。在本文的设计中,为了消除飞翼无人机各种已知的不利非线性耦合项,首先采用气动补偿和线性化解耦方法对内环姿态回路进行补偿;外环跟踪回路采用反步跟踪方法对指定理想指令进行跟踪;为了克服各种不确定性干扰影响,保证跟踪精度采用PSO补偿器对跟踪误差进行补偿。本文证明了该控制结构的稳定性。同传统反步控制方法相比,本控制器增加了内环解耦结构。不同于传统的动态逆解耦控制方法,本文在控制结构中保留气动阻尼项,使得线性化后的系统为弱非线性系统。该结构不仅可以降低外环控制器设计的保守性,而且便于工程实现。
1 飞翼无人机气动建模样例飞翼无人机如图 1所示。该无人机具有位于翼面尾部的升降副翼舵、机翼上的阻力式方向舵。其中,升降副翼舵可以通过分配算法进行制动,联动为升降舵,差动为副翼。

|
| 图 1 样例无人机结构图 Fig. 1 Configuration of a sample UAV |
该无人机的发动机具有流体矢量装置,不仅提供推力,还可以提供矢量控制力矩。该发动机的喷流可以在垂直方向产生20°的矢量角,以产生俯仰控制力矩。该流体矢量发动机结构如图 2所示。

|
| 图 2 流体矢量涡轮增压发动机SolidWorks模型 Fig. 2 Model of fluidic thrust vectoring-turbochargedengine by SolidWorks |
该流体矢量发动机具有复杂的控制特性。其具体响应特性如图 3所示,pi、Δp分别为控制量和改变范围。

|
| 图 3 FTV-E控制过程的动态响应 Fig. 3 Dynamic response of control process by FTV-E |
从图 3可知,FTV-E的控制动态响应类似于无人机大迎角条件下的迟滞效应。因此,对该装置的控制难点有两点:非线性控制方法和控制舵机的响应速度。该装置的控制问题已通过合理的控制律设计方法和脉宽调制(Pulse Width Modulator,PWM)控制舵机得到了良好的解决。本文在该装置满足控制要求的前提下分析该装置与无人机外流场的相互影响对无人机控制系统设计的带来的挑战。
在流体矢量发动机的控制满足要求的假设下,该该装置产生的力与力矩与传统的矢量发动机相似,因此,本文借鉴具有矢量发动机的无人机建模方式进行建模。而本文假设发动机矢量流与无人机外流场之间的耦合效应为不可建模部分,以干扰的形式来体现。
根据具体的研究对象和后文控制器设计表述方便,对飞翼无人机建立姿态方程如下模型:

|
(1) |
式中:ω=[p, q, r]T为飞翼无人机姿态角速度矩阵,p、q、r为无人机的姿态角速率;MA为气动力矩;MT为矢量力矩;I和S(ω)为惯性矩阵和ω的反对称矩阵,具体的形式如下:
|
其中:Ix、Iy、Iz和Ixz为无人机的转动惯量。
飞翼无人机的姿态方程、气流坐标系下的速度和气流角方程如下:
|
(2) |
|
(3) |

|
(4) |
|
(5) |
式中:α、β和θ、φ为无人机的气流角和姿态角;其余参量的符号表示均参考惯用表达习惯,具体可参见文献[2-4]。
2 控制器结构设计对于控制而言,理想的控制对象为线性系统。但是,实际中的对象多为非线性系统,特别是机动飞行的飞翼无人机,其非线性特性非常强烈。为了协调这对矛盾,于是诞生了非线性系统的线性化方法并得到了快速发展。
传统的动态逆解耦线性化控制方法是通过系统的状态反馈补偿掉系统所有的非线性项。具体到无人机则包括气动力/力矩非线性及耦合项、惯性耦合项和重力耦合项等。而在实际中,惯性耦合项、重力耦合项和部分气动耦合项等对控制效果影响较大,设计过程中需要对这些项进行线性化才能达到理想的控制效果。然而,气动非线性项中的阻尼项对无人机的动稳定性保持是有利的,保留下来可以减少操作舵面的负担。保留气动阻尼项的系统是包含时变参数的弱非线性系统,但是,在设计外环控制器时,具有降低系统的保守性,而且便于工程实现。本文控制器结构如图 4所示。

|
| 图 4 控制器结构图 Fig. 4 Controller structure diagram |
在图 4所示的控制结构中,非线性解耦模块、惯性力矩耦合补偿模块和非线性非定常气动力矩补偿模块构成系统的内环控制器。经过内环控制器的补偿、解耦之后,系统为保留气动阻尼项的弱非线性系统。外环控制器采用反步跟踪算法进行设计以满足系统对希望指令的跟踪要求。PSO补偿器用来消除系统的跟踪误差,提高系统的鲁棒性。
3 姿态方程的线性化解耦 3.1 保留气动阻尼项的力矩补偿为飞翼无人机进行各种气动补偿且保留气动阻尼项,本文设计了如图 5所示的气动补偿模块[29]。

把式(1)中气动力矩表示为如下形式:

|
(6) |
式中:δA=[δa, δe, δr]T为飞翼无人机气动舵面组成的矩阵,δa、δe、δr分别为副翼、升降舵阻力式方向舵;φ1=[1,α, β, p, q, r]T。
|
其中:Q、s分别为动压和机翼面积; b、c分别为机翼展长和平均气动弦长;其他参数Cl0、Clβ、Clr、Clp、Clr、Cm0、Cmα、Cmq、Cnβ、Cnp、Cn0、Cnr为无人机的气动参数。

|
其中:Clδa、Clδr、Cmδe、Cnδe、Cnδa为飞翼无人机的气动参数。
推力矢量力矩可以通过油门开度δth和射流偏角δT控制。令推力矢量作用点到质心的距离沿机体坐标系到X轴和Z轴的投影距离分别为XT和ZT,推力产生的力矩可表示为
|
(7) |
式中:T(δth)为发动机推力函数。令气动力矩Θi和发动机推力MT0为含摄动函数的非线性函数

|
其中:Θi和MT0分别为气动力矩和发动机推力的标称值,这两组值为慢变量;ΔΘi和ΔMT0分别为气动力矩和发动机推力的摄动值,是随时间而变化的快变量。
将式(6)、式(7)代入式(1)得

|
(8) |
式中:f=-I-1S(ω)Iω+I-1Θ1φ1+I-1MT0; Δf=I-1ΔΘ1φ1+I-1ΔMT0; g=I-1[Θ2, Θ3]; Δg=I-1[ΔΘ2, ΔΘ3]; δ=[δAT, δT]T。
系统标称模型为

|
(9) |
式中:f0=f-Kω为对飞行不利,需要消除掉的耦合力矩,包括不利的气动耦合力矩、推力耦合力矩、惯性耦合力矩等;K=diag(k1, k2, k3)为各控制通道的阻尼力矩的标称值,k1=h11lp+h13np,k2=h22mp,k3=h31lr+h33nr,hij(i, j=1, 2, 3)为惯性矩阵I-1的第i行和j列分量,lp、np、mp、lr、nr为各通道的阻尼力矩气动参数;ucm、ulin为气动补偿控制律、外环控制律; Θ1、MT0和K可以通过气动数据库以及推力数据库和飞翼无人机当前飞行状态数据进行插值计算得到。
该气动补偿模块存在的意义是在保留阻尼特性的情况下消除其他非线性特性。因此,补偿力矩为

|
(10) |
通过式(10)所示的气动补偿器可以消除各种影响飞行品质的耦合力矩。
将式(10)代入式(9)可得
|
(11) |
因此,以ulin为控制量进行外环控制器设计时可以保证系统具有较好的闭环性能。
3.2 姿态方程的线性化为了消除系统状态间的非线性特性,下面介绍采用基于李导数的输入/输出线性化方法。步骤如下:
1) 选择在xo邻域内的坐标变换函数集。
|
(12) |
2) 把系统方程变换为m组方程并表示为
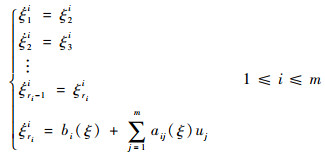
|
(13) |
式中:

|
(14) |
3) 把

|
(15) |
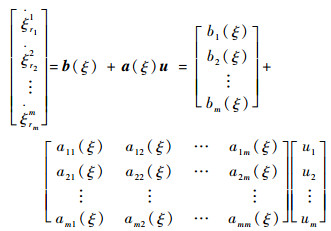
令b(ξ)+a(ξ)u=v=[v1, v2, …, vm]T, 则精确线性化的反馈控制律为

|
(16) |
经过上述坐标变换和状态反馈,原非线性系统可以变换为Brunovsky标准形:
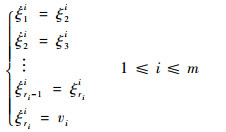
|
(17) |
对于飞翼无人机具体的方程形式,由式(14)可得系统的坐标变换函数为
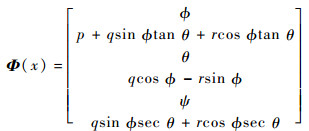
|
(18) |
由式(13)可得
|
(19) |

|
(20) |
将飞翼无人机解耦后的姿态方程和轨迹方程分别表示为

|
其中:状态向量x1, x2, x3, u∈R3,且x1=[α, β, φ]T,x2=[p, q, r]T,x3=[φ, θ, ψ]T,u=[δe, δa, δr, δT, δth]T,x4=[x1, x2]T。
4 粒子群优化算法PSO补偿器的目的是提高系统的鲁棒性,减小各种干扰对系统响应的影响。
PSO算法对于任意非线性函数Δ:Ω→Rp,PSO算法得出的结果存在常数ε>0使得

为提高PSO算法的效率,本文采用式(21)所示的混沌函数对算法粒子初置进行初始化,式(22)确定权重系数。
|
(21) |

|
(22) |
式中:n为粒子群粒子个数;ωstart和ωend分别为初始权重系数和迭代最大次数时的权重系数;Tmax为迭代最大次数。
5 外环控制器设计外环控制器的作用是根据飞行器的当前飞行状态和输入指令输出自适应律实现对气流角的输入指令进行精确跟踪。使得系统的输出x1渐进跟踪期望的参考输入x1d。
定义系统的误差为
|
(23) |
式中:
系统状态误差可定义为

|
(24) |

|
(25) |
式中:x2d为参考输入。
对式(24)、式(25)求导,并代入闭环误差状态方程可得

|
(26) |

|
(27) |
式中:ϕ1、ϕ2为防止由于控制器权值过大而破坏系统的稳定性而引入的参数向量。
由式(26)可得

|
(28) |
定义z1系统的理想控制量为

|
(29) |
式中:k1>0为需要设计参数向量。因为ϑ*是未知量,这里用估计值

|
(30) |
将式(30)代入式(28)可得

|
(31) |
根据式(27), 定义系统的理想控制输入为

|
(32) |
式中:k2为需要设计的参数向量。
同上

|
(33) |
代入式(27)可得

|
(34) |
分析和证明系统稳定性需要选取Lyapunov函数,则

|
(35) |
将


|
(36) |
对V(t)对时间t求导可得
|
(37) |
令PSO的权值自适应律为

|
(38) |
式中:

将以上自适应律代入式(37)可得
|
(39) |
式中:k10、k11、k20、k21为需要设计的参数。
由于不等式(40)成立:
|
(40) |
将式(40)代入式(39)可得
|
(41) |
式中:
令ρ=min{2k10, 2k20, αi, βi}则式(41)可表示为

|
(42) |
给出如下定理。
定理1 对于解耦后飞翼无人机,在给定已知的输入参考信号x1d,采用控制律式(33)和PSO补偿器给出的自适应律式(38),对于任意给定的初始紧集:

|
有如下结论:
1) 闭环系统状态x(t)=[x1T, x2T]T和PSO自适应权值

|
(43) |

|
(44) |

|
(45) |
式中:
|
2) 系统的状态及PSO补偿器权值指数收敛于一个有界紧集Ωs内:

|
(46) |
式中:
对结论1)证明如下:
对式(42)两边从[0, t]积分可得

|
(47) |
即

|
(48) |
根据式(48)和式(36)可得
|
由于

|
(49) |

|
(50) |
由式(49)和式(50)可得式(43)、式(44)。
由于z1、z2、x1d有界,又因e(t)=x1(t)-xd(t),可得

|
(51) |
即式(45)成立,结论1)得证。
对结论2)证明如下:
由式(49)可得

|
(52) |

|
(53) |

|
(54) |
若V(0)=τ/ρ,则∀t≥0,||e(t)||≤μe*。若V(0)≠τ/ρ,则存在Tr,使得当t>Tr时||e(t)||≤μe*。
令μe=

|
(55) |
|
(56) |

|
(57) |
结论2)得证。
由式(46)可知,通过调整k10、k20、λ1、αi、λ2、βi的大小,可以调整系统的收敛速度和收敛域的大小。
7 仿真验证为了验证本文控制器的性能,本文选取耦合严重、抗侧滑要求高的蛇形机动进行仿真。蛇形机动的飞行过程为:在海拔高度500 m,无人机以100 m/s的速度进入机动动作。在该机动动作中,无人机通过快速滚转实现速度方向顺时针转动180°。然后,通过反向滚转使得速度方向从180°转到0°。运动中2个转向过程连续衔接。
为了验证控制器的鲁棒性,在整个机动过程中选取如下气动系数发生不同程度的偏移,不确定性变化范围如表 1所示,ΔCβL、ΔCβN、CpL、CrN分别为侧滑角和角加速度引起的气动力矩系数,ΔL为重心漂移。
| 参数 | ΔCβL/% | ΔCβN/% | CpL/% | CrN/% | ΔL/cm |
| 偏移幅度 | 15 | -10 | 20 | 20 | 1.5 |
蛇形机动仿真结果如图 6所示,红色实线为无拉偏情况,黑色虚线是气动参数存在扰动情况。

|
| 图 6 飞翼无人机蛇形机动仿真结果 Fig. 6 Simulation results of flying wingUAV snake maneuver |
从机动轨迹看,当无人机建立大角度滚转姿态时,飞行高度有所降低。带有气动拉偏情况下的轨迹线在第1个转弯处出现了很小的偏差。但是,飞翼无人机依然完成了机动转弯。从无人机的姿态角和侧滑角的动态图可知,控制器对扰动有很好地适应性。
从图 7可知:在飞行过程中,飞翼无人机各气动控制舵面出舵量适中,波动量很小。但是,在飞行过程中,由于控制器时刻要对无人机进行气动补偿和解耦,使得各舵面处于快速振荡状态。

|
| 图 7 无人机蛇形机动出舵量 Fig. 7 Rudder angle of UAV snake maneuver |
1) 针对飞翼布局无人俯仰操纵能力不足的特点,设计无人机采用流体矢量涡轮增压发动机提供动力和额外俯仰矢量力矩。
2) 针对飞翼无人机的机动飞行控制存在各种耦合和扰动的特点,本文设计了内环线性化解耦补偿器消除各种不利的耦合项,采用反步跟踪算法设计了外环航迹跟踪,并采用PSO补偿器补偿各种扰动和不可建模项的控制方案。
3) 本文证明了该控制结构的稳定性。同传统反步控制方法相比,本控制器增加了内环解耦结构,使得线性化后的系统为弱非线性系统。同时保留了对飞行稳定有利的保留气动阻尼项,便于工程实现。
4) 对蛇形机动的仿真结果表明,该设计方案是有效的。
| [1] | LAN C E, LI J L, YAU W C, et al. Longitudinal and lateral-directional coupling effects on nonlinear unsteady aerodynamic modeling from flight data[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit. Reston: AIAA, 2013: 394-402. |
| [2] | ALIKHAN M, PEYADA N K, GO T H. Flight dynamics and optimization of three-dimensional perching maneuver[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (6): 1791–1797. DOI:10.2514/1.58894 |
| [3] | GUO Y, YAO Y, WANG S, et al. Maneuver control strategies to maximize prediction errors in ballistic middle phase[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (4): 1225–1234. DOI:10.2514/1.56818 |
| [4] | ZHI Q, CAI Y L. Energy-management steering maneuver for thrust vector-controlled interceptors[J]. Journal of Guidance, Control, and Dynamics, 2012, 35 (6): 1798–1804. DOI:10.2514/1.56611 |
| [5] | MUELLER J B, GRIESEMER P R, THOMAS S J. Avoidance maneuver planning incorporating station-keeping constraints and automatic relaxation[J]. Journal of Aerospace Computing Information & Communication, 2013, 10 (6): 306–322. |
| [6] | NEELY A J, GESTO F N, Young J. Performance studies of shock vector control fluidic thrust vectoring[C]//Proceedings of 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference. Reston: AIAA, 2007: 1-14. |
| [7] | KAREN A D. Summary of fluidic thrust vectoring research conducted at NASA langley research center: AIAA-2003-3800[R]. Reston: AIAA, 2003. |
| [8] | SADIQ M U. Performance analysis and flowfield characterization of secondary injection thrust vector control (SITVC) for a 2DCD nozzle[D]. Los Angeles: University of Southern California, 2007: 85-108. |
| [9] |
王猛杰, 额日其太, 王强. 激波矢量控制喷管落压比影响矢量性能及分离区控制数值模拟[J].
航空动力学学报, 2015, 30 (3): 527–538.
WANG M J, ERIQITAI, WANG Q. Numerical simulaton of nozzle pressure ratio effect on vector performance and separation control for shock vector control nozzle[J]. Journal of Aerospace Power, 2015, 30 (3): 527–538. (in Chinese) |
| [10] | KIRANYAZ S, INCE T, GABBOUJ M. Dynamic data clustering using stochastic approximation driven multi-dimensional particle swarm optimization[J]. Lecture Notes in Computer Science, 2010, 22 (10): 1448–1462. |
| [11] | YANG Y, CHEN X, LI C. Transient performance improvement in model reference adaptive control using H∞ optimal method[J]. Journal of the Franklin Institute, 2015, 352 (1): 16–32. DOI:10.1016/j.jfranklin.2014.09.014 |
| [12] |
杨艺, 陈欣, 李春涛. 一种可保证瞬态特性的改进鲁棒模型参考自适应控制[J].
控制与决策, 2015, 30 (8): 1379–1385.
YANG Y, CHEN X, LI C T. A modified robust model reference adaptive controller with guaranteed transient performance[J]. Control and Decision, 2015, 30 (8): 1379–1385. (in Chinese) |
| [13] |
朱纪洪, 张尚敏, 周池军, 等. 飞机超机动状态动力学特征及对控制系统的挑战[J].
控制理论与应用, 2014, 31 (12): 1650–1662.
ZHU J H, ZHANG S M, ZHOU C J, et al. Dynamic characteristics and challenges for control system of super-maneuverable aircraft[J]. Control Theory & Applications, 2014, 31 (12): 1650–1662. (in Chinese) |
| [14] | WILSON J R. UAV worldwide roundup 2007[J]. Aerospace America, 2007, 45 (5): 30–37. |
| [15] | OSTERHUBER R. FCS requirements for combat aircraft-lessons learned for future designs[C]//Workshop on Stability & Control, 2011: STO-AVT-189. |
| [16] | LI J, CHEN X, LI Z. The attitude decoupling control of the flying wing UAV[C]//Proceedings of IEEE Guidance, Navigation and Control Conference. Piscataway, NJ: IEEE Press, 2017: 357-362. |
| [17] | BANKS A, VINCENT J, ANYAKOHA C. A review of particle swarm optimization.Part Ⅱ:Hybridisation, combinatorial, multicriteria and constrained optimization, and indicative applications[J]. Natural Computing, 2008, 7 (1): 109–124. DOI:10.1007/s11047-007-9050-z |
| [18] |
范成礼, 邢清华, 范海雄, 等. 带审敛因子的变邻域粒子群算法[J].
控制与决策, 2014, 29 (4): 696–701.
FAN C L, XING Q H, FAN H X, et al. Particle swarm optimization and variable neighborhood search algorithm with convergence criterions[J]. Control and Decision, 2014, 29 (4): 696–701. (in Chinese) |
| [19] |
贾树晋, 杜斌, 岳恒. 基于局部搜索与混合多样性策略的多目标粒子群算法[J].
控制与决策, 2012, 27 (6): 813–819.
JIA S J, DU B, YUE H. Local search and hybrid diversity strategy based multi-objective particle swarm optimization algorithm[J]. Control and Decision, 2012, 27 (6): 813–819. (in Chinese) |
| [20] |
李擎, 张超, 陈鹏, 等. 一种基于粒子群参数优化的改进蚁群算法[J].
控制与决策, 2013, 28 (6): 873–879.
LI Q, ZHANG C, CHEN P, et al. Improved ant colony optimization algorithm based on particle swarm optimization[J]. Control and Decision, 2013, 28 (6): 873–879. (in Chinese) |
| [21] | POLI R, KENNEDY J, BLACKWELL T. Particle swarm optimization:An overview[J]. Swarm Intelligence, 2007, 1 : 33–57. DOI:10.1007/s11721-007-0002-0 |
| [22] | SOEST W R V, CHU Q P, MULDER J A. Combined feedback linearization and constrained model predictive control for entry flight[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (2): 427–434. DOI:10.2514/1.14511 |
| [23] | SONNEVELDT L, CHU Q P, MULDER J A. Nonlinear flight control design using constrained adaptive backstepping[J]. Journal of Guidance, Control, and Dynamics, 2007, 30 (2): 322–336. DOI:10.2514/1.25834 |
| [24] | LEE T, KIM Y. Nonlinear adaptive flight control using backstepping and neural networks controller[J]. Journal of Guidance, Control, and Dynamics, 2001, 24 (4): 675–682. DOI:10.2514/2.4794 |
| [25] | SIEBERLING S, CHU Q P, MULDER J A. Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction[J]. Journal of Guidance, Control, and Dynamics, 2010, 33 (6): 1732–1742. DOI:10.2514/1.49978 |
| [26] | MACKUNIS W, PATRE P M, KAISER M K, et al. Asymptotic tracking for aircraft via robust and adaptive dynamic inversion methods[J]. IEEE Transactions on Control Systems Technology, 2010, 18 (6): 1448–1456. DOI:10.1109/TCST.2009.2039572 |
| [27] | JOHNSON E N, TURBE M A. Modeling, control, and flight testing of a small-ducted fan aircraft[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (4): 769–779. DOI:10.2514/1.16380 |
| [28] | XU B, HUANG X, WANG D, et al. Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation[J]. Asian Journal of Control, 2014, 16 (1): 162–174. DOI:10.1002/asjc.2014.16.issue-1 |
| [29] |
李继广, 陈欣, 王鑫, 等. 飞翼无人机机动飞行非线性鲁棒自适应控制[J].
系统工程与电子技术, 2017, 39 (9): 2058–2067.
LI J G, CHEN X, WANG X, et al. Nonlinear robust adaptive control of flying wing UAV maneuvering flight[J]. Systems Engineering and Electronics, 2017, 39 (9): 2058–2067. DOI:10.3969/j.issn.1001-506X.2017.09.20 (in Chinese) |