



2. 北京航空航天大学 航空科学与工程学院, 北京 100083
2. School of Aeronautic Science and Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100083, China
复飞是指飞机在进近着陆的过程中,由于机场障碍、飞机无法建立稳定安全进近或本身存在故障等不宜降落的条件存在时,飞机中止着陆并严格按照程序重新拉起转入爬升的过程[1]。根据执行复飞时飞机所处的阶段不同,复飞可分为发生在着陆阶段时的着陆爬升和进近阶段时的进场爬升[2]。复飞应保证飞机能迅速增速和安全上升,为此驾驶员应迅速平稳地将发动机油门推至最大并柔和地拉杆[3],此时飞机由下滑逐渐过渡到爬升状态。衡量复飞安全性的是爬升梯度,其定义为爬升时的高度增量与飞行水平距离之比,表征了飞机的越障能力[4]。运输类飞机适航标准CCAR-25-R4[2]规定了民用飞机的复飞爬升梯度应满足的条件,并要求最终通过飞行试验来完成适航符合性验证。此外,复飞爬升梯度也是评估飞机最大着陆重量的重要限制条件。因此,有必要在民机的方案设计阶段就较为准确地计算出复飞爬升梯度,以保证飞机最终通过复飞爬升性能条款的适航符合性验证,并为飞机最大着陆重量的确定提供依据。
目前,计算飞机复飞爬升梯度通常是由爬升状态下的飞机动力学方程推导出爬升梯度计算公式,通过代入飞机重量、升阻比、发动机推力和加速因子等变量的值来确定飞机爬升梯度的大小[5-8]。该方法使用了一些简化的假设,并且当涉及到估计修正系数的大小时带有一定的经验成分;另外对于单发失效下进场复飞爬升梯度的计算,除要考虑增加风车阻力外,飞机为配平发动机失效导致的偏航力矩还会产生偏航阻力,这将使飞机爬升性能进一步下降,为确定偏航阻力需进行额外的配平迭代计算,过程繁琐,且常被忽略不计。这些都会影响评估结果的精确度。
随着数字计算机和计算流体力学(CFD)技术的发展,设计人员可以越来越方便地在方案设计阶段就获得充足的气动数据,这就为在设计早期阶段就建立飞机的运动模型,进行飞行仿真计算创造了条件。为此,国外早在20世纪90年代末就提出了在飞机早期方案设计阶段通过建模和仿真对飞机适航符合性进行评估的数字虚拟飞行方法[9-10],随着近年中国民用航空产业的飞速发展,针对数字虚拟飞行方法的研究和应用方兴未艾[11-13]。所谓数字虚拟飞行方法,是指首先根据考核飞行任务的适航条例,建立飞行任务模型和适航评估指标,然后再构建飞机运动模型和驾驶员操纵模型,并进行符合适航标准规定的仿真计算,最后依据仿真结果直接评估设计的方案是否满足设计要求及适航符合性。该方法有效克服了经验公式和工程估算方法的不足,能够更加准确有效、方便快捷地评估民机飞行性能的适航符合性。
本文基于与复飞任务相关的适航条款建立了着陆爬升和进场爬升任务的数字化模型和驾驶员操纵模型,与飞机飞行动力学模型一起构成了复飞任务的数字虚拟飞行仿真模型,结合复飞爬升梯度的适航符合性指标要求,构成了基于数字虚拟飞行的民机复飞爬升梯度适航符合性评估方法。以中国某型涡喷支线客机为算例,对着陆爬升和进场爬升任务进行了仿真,并将评估结果与真实试飞结果进行对比,验证了本文方法的准确性和可靠性。
1 适航条款分析为保证飞机在复飞爬升时能安全越障,CCAR-25-R4第25.119条和第25.121条(d)分别对民机着陆爬升和进场爬升的适航符合性验证状态以及最小爬升梯度做出了规定,具体如图 1所示[2]。图中:LD为着陆距离。2种复飞爬升梯度的适航符合性验证都需要考虑着陆重量、构型、速度和结冰条件等因素的影响。

图 1中:VREF称为基准着陆速度,是整个着陆航线飞行中的参考速度,也是进行着陆爬升和进场爬升验证试飞时的爬升速度,其取值大小应确保飞机复飞时具有足够的性能[14];VSR为基准失速速度;VMCL为全发工作进场着陆时的最小操纵速度;VS为着陆构型下的失速速度。通常民机采用五边进近的方式进场着陆,一般在下降到1 000 ft(1 ft=0.304 8 m)之前完成四边至五边的转弯,而后进入五边进近。沿着陆航线在跑道入口上空50 ft处的一点被定义为进近目标窗口,同时也是跑道入口的窗口,该点处的目标速度为VREF,在五边稳定进近过程中,应不断修正速度并控制在VREF[14]。
着陆阶段飞机的高度余量很小,且复飞过渡段还有一定量的航迹下沉,因而CCAR-25-R4第25.119条对着陆爬升只定义了全发工作时的情况,未考虑严酷的单发失效情形[2]。该条规定着陆爬升的验证试飞状态为:全部发动机对称功率,取油门杆从最小飞行慢车位移向复飞推力位8 s之后的可用推力;着陆构型;估算得到的最小爬升限制着陆重量[15],前重心;起落架放下。当飞机以该着陆构型复飞的定常爬升梯度不得小于3.2%。
对于进场爬升而言,单发失效状态显然比全发工作状态更为严酷,因此CCAR-25-R4第25.121条(d)规定进场爬升的验证试飞状态为:关键发动机停车,剩余发动机处于复飞推力状态;进场构型;最大着陆重量,前重心;起落架收起[2]。当飞机以该进场构型爬升,定常爬升梯度应为:①双发飞机不小于2.1%;②三发飞机不小于2.4%;③四发飞机不小于2.7%。
综上,民机复飞爬升梯度适航符合性评估的主要内容是:根据适航条款制定飞机构型、飞行状态和复飞程序等符合条款规定的验证试飞任务,试飞完成后得到复飞定常爬升梯度,确定其大小是否满足相应的数值要求。
2 基于数字虚拟飞行的适航符合性评估方法基于数字虚拟飞行的适航符合性评估方法,一般可分成3个步骤:①根据考核飞行任务的相关适航条款,建立适航评估指标和飞行任务数字化模型;②构建包含飞机本体运动模型、飞行控制系统模型和驾驶员操纵模型的飞行仿真模型,以及满足适航条款要求的外部环境(如风场、跑道路况等)模型;③利用该仿真模型,完成考核任务的数字虚拟飞行,并基于仿真结果对相应指标进行适航符合性评估。图 2展示了该方法的基本流程和结构,主要包括飞机本体运动模型、飞行任务数字化模型、驾驶员操纵模型、外部环境模型和适航符合性评估环节。

|
| 图 2 基于数字虚拟飞行的适航符合性评估方法结构框图 Fig. 2 Architecture of airworthiness compliance evaluation method based on digital virtual flight |
飞机本体运动模型采用六自由度刚体动力学方程[16]:
|
(1) |
|
(2) |
式中:m为飞机质量;g为重力加速度;Xg、Yg、Zg为飞机质心在地面坐标系中的坐标;Ti为单台发动机推力;nT为发动机台数;φT为发动机安装角;LEB为机体坐标系到地面坐标系的转换矩阵;LBA为气流坐标系到机体坐标系的转换矩阵;D、C和Llift分别为沿气流坐标系的气动阻力、侧力和升力;p、q和r分别为滚转、俯仰和偏航角速度;Ix、Iy和Iz为机体轴三轴转动惯量;Izx为惯性积;L、M和N分别为滚转、俯仰和偏航力矩;xTi、yTi、zTi为第i台发动机推力作用点坐标。
2.2 飞行控制系统模型现代客机普遍采用电传飞行控制系统,其工作的基本过程为:首先,驾驶员输入的操纵力通过操纵杆和脚蹬转换为电信号,并输入飞行控制计算机;然后,飞行控制计算机根据已设计好的控制律计算出各操纵面的偏度,生成电信号并将其输入到对应操纵面的作动器;最后,各操纵面开始偏转,使飞机达到期望的飞行姿态、航迹或位置。飞行控制系统的基本模型结构如图 3所示。

|
| 图 3 飞行控制系统基本模型 Fig. 3 Basic flight control system model |
操纵面作动器模型如图 4所示,包含作动器动力学、偏转速率限制和操纵面幅度限制环节。操纵面作动器动力学环节为二阶系统,传递函数如式(3)所示:
|
(3) |

|
| 图 4 操纵面作动器模型 Fig. 4 Actuator model of control surfaces |
式中:δact为操纵面偏转角;ωns为操纵面振荡自然频率;ξ为阻尼比。
2.3 发动机模型采用一阶惯性环节模拟发动机的油门响应特性,表达式如下:
|
(4) |
式中:δpi为第i台发动机的实际油门;Tp为发动机时间常数;δpi.c为油门偏度指令,取值范围为0~1,建模时取复飞推力油门偏度δpi.NTO=1,慢车推力油门偏度δpi.NFI=0.2,发动机停车时δpi.F=0。发动机推力根据油门、马赫数、高度和温度差从推力数据表格插值得到,推力响应特性由Tp决定。
另外,进场爬升时关键发动机停车,建模时还考虑了发动机停车后的风车阻力。
2.4 飞行任务数字化模型飞行任务数字化模型是基于适航条款对试飞任务的要求制定的数字虚拟飞行指令[17],也是对考核任务的量化,主要包括飞机构型参数、初始飞行状态、驾驶员操纵程序以及使用条件等[12]。复飞爬升梯度适航符合性验证试飞任务的飞机构型参数和初始飞行状态等已在第1节中给予了详细说明,下面对驾驶员操纵程序进行数字化建模。
2.4.1 着陆爬升根据相关适航规章[2, 14],制定着陆爬升任务的数字虚拟试飞操纵程序如下:
1) 在试验高度足够高的高度上按着陆构型、起落架放下、全发对称功率或推力的形态设置飞机,收油门到飞行慢车位,并调整以进场速度VREF下滑,逐渐接近至试验高度。
2) 驾驶员在试验高度决定复飞,平稳迅速地推油门至复飞位,同时拉杆调整飞机姿态,使飞机转入爬升,且在稳定爬升时保持试验空速在VREF,确定推油门至少8 s后的定常爬升梯度。
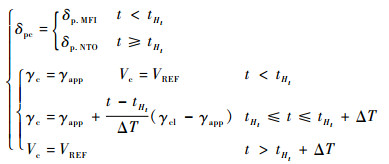
基于上述操纵程序,着陆复飞任务的数字虚拟飞行指令可以写为
|
(5) |
式中:δpc、γc和Vc分别为油门指令、航迹倾角指令和速度指令;δp.MFI为油门杆慢车位;δp.NTO为油门杆复飞位;tHt为飞机到达试验高度驾驶员开始执行复飞的时刻;ΔT为飞机从下滑拉起到爬升的过渡时间,一般可取为8 s;γapp为慢车推力时的下滑角;γcl为飞机转入复飞时的初始目标爬升角。在tHt到tHt+ΔT内γc线性增加,以模拟拉起过程;在tHt+ΔT后将速度调整恢复到VREF,逐渐建立稳定爬升。
2.4.2 进场爬升按同样方法制定的进场爬升任务的虚拟试飞操纵程序如下:
1) 设置飞机为进场构型、起落架收起、全发对称推力的形态,调整飞机以进场速度VREF沿着-3°下滑角从试验高度上足够高的高度开始下降。
2) 到达试验高度时,驾驶员关闭一台关键发动机,将其余发动机油门平稳推至复飞位,同时结合使用方向舵和副翼稳定飞机姿态,并柔和拉杆使飞机进入稳定爬升。
3) 拉杆调整飞机姿态,使飞机保持试验空速在VREF,确定最终的定常爬升梯度。
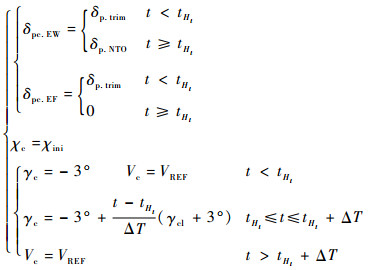
进场复飞任务的数字虚拟飞行指令为
|
(6) |
式中:δpc.EW为正常工作发动机油门;δpc.EF为被选停车的关键发动机的油门;δp.trim为定常下滑时的配平油门;χc为航迹偏角指令;χini为初始航迹偏角,保持恒定,可取为零,以保证飞机作直线复飞[1]。飞机初始按γc=-3°下滑,而后γc线性增加,飞机转入复飞,在tHt+ΔT后调整速度恢复到VREF,建立稳定爬升。
2.5 驾驶员操纵模型驾驶员操纵模型用于描述驾驶员的操纵行为,其由当前飞行任务要求和飞机飞行状态反馈给出具体的操纵输入[1-2]。在一般的数字虚拟飞行任务仿真中,驾驶员操纵模型可分为内外两环,外环依据飞机飞行姿态、速度和航迹的要求生成姿态指令,内环则跟踪飞机的姿态指令,给出操纵面操纵量[18]。基于2.4节所建的飞行任务数字化模型,建立着陆爬升和进场爬升任务通用的数字虚拟飞行仿真控制结构如图 5所示。图 5中:θc、ϕc、ψc为三轴姿态角指令;δp、δe、δa和δr分别为油门、升降舵、副翼和方向舵偏角。

|
| 图 5 复飞爬升数字虚拟飞行仿真控制结构框图 Fig. 5 Control architecture of digital virtual flight simulation for go-around climb |
油门通道为开环操纵。如2.4节中所述,在下滑到试验高度前,着陆复飞任务发动机为慢车油门δp.MFI,进场复飞任务发动机油门为按-3°下滑角、速度为VREF下滑的配平指令δp.trim;到达试验高度驾驶员决定复飞后,对于着陆复飞任务全发油门推至复飞位δp.NTO,对于进场复飞任务正常工作发动机油门指令为复飞位,而关键发动机停车,δpc.EF=0。油门指令经发动机惯性环节后生成实际油门输入到发动机模型,产生对应的推力。
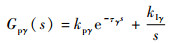
三轴操纵面通道则为内外环形式的闭环操纵。对于升降舵通道,在飞机复飞前的下滑阶段以及复飞拉起转入爬升的阶段,外环为航迹跟踪控制,驾驶员根据航迹倾角偏差(γc-γ)来确定俯仰姿态增量指令Δθc,再通过内环的俯仰姿态控制最终实现航迹跟踪。因此,Gpγ(s)为[19]
|
(7) |
式中:kpγ为比例环节增益;τγ为驾驶员信息处理延迟时间;为消除Δθc的稳态误差引入了积分环节,kIγ为积分环节增益。
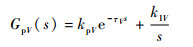
在飞机拉起后的稳定爬升段,驾驶员需保持速度在VREF,因此时油门已经设定,只能通过调整航迹倾角来控制空速。驾驶员根据速度的偏差(Vc-V)生成航迹倾角增量Δγc,继而通过内环的航迹跟踪控制,改变重力在航迹上的切向投影分量,实现速度的保持控制。因此,GpV(s)设计为
|
(8) |
式中:kpV为驾驶员增益;τV为驾驶员信息处理延迟时间;kIV为消除稳态误差的积分环节的增益。由于若Vc-V<0,需Δγc>0,反之则Δγc<0,因此kpV和kIV都应取负值。
副翼和方向舵通道的外环输入都为航迹偏角指令,共同实现航向保持的目的。对于着陆爬升任务,在无侧风情况下,仿真中横航向通道可不予关注;而对于进场爬升任务,由于推力的不对称,需要通过该通道稳定飞机姿态和保持航向。其中,Gpχ.a(s)的结构与式(7)和式(8)相同:
|
(9) |
式中:各参数与式(7)和式(8)的对应参数含义相同。由于飞机航向主要通过副翼通道改变滚转角来控制,方向舵通道只起辅助作用,故Gpχ.r(s)设计成只含比例环节:

|
(10) |
内环的三轴姿态操纵Gpθ(s)、Gpϕ(s)和Gpψ(s)均采用一种改进的McRuer驾驶员操纵模型[20-22]。该模型除对驾驶员依据视觉信息进行姿态偏差补偿的行为进行建模外,还建立了因人体旋转运动感受器官感知角运动变化而引入的反馈模型,最终生成三轴操纵面偏转指令,即δac、δec和δrc。其结构框图如图 6所示。

|
| 图 6 驾驶员操纵模型 Fig. 6 Pilot control model |
图 6中:Hpv回路用于补偿姿态偏差,Hec与McRuer模型类似,其数学描述见式(11)[20],式中各参数的意义和取值范围如表 1中所示[23]。
|
(11) |
Hpm回路为驾驶员的加速度感受回路,用于反馈三轴转动角加速度。其中,Km为运动感觉补偿增益,Hscc为人体内耳前庭器官系统中的半规管模型,用于感知角运动变化,其数学描述为[21]

|
(12) |
驾驶员操纵模型中的限制项e-τvs和e-τms表示驾驶员对信息反应的神经传导时延,而Hnm(s)表示手臂神经肌肉系统的动态特性,其数学描述为自然频率ωn=9.0 rad/s,阻尼比ζ=0.7的二阶环节:
|
(13) |
表 1总结列出了Hosman驾驶员操纵模型中各参数的符号、含义和取值范围[23]。
2.6 复飞爬升梯度适航符合性评估复飞任务的外部环境模型主要是大气环境的设置。一般在进行爬升梯度科目的取证试飞时,需分别进行正反航向的爬升试验,然后取结果的均值,以消除风速影响[15]。因此,风场可采用平静大气模型。
综上,基于上述飞机本体运动模型、复飞爬升任务数字化模型和驾驶员操纵模型,即可构建图 2所示的复飞爬升任务的数字虚拟飞行仿真模型。为完成复飞爬升梯度的适航符合性评估,首先初始化考核飞行任务设置,包括试验高度、进场速度、重量与重心位置、飞机构型、起落架收放状态、发动机推力大小等;然后进行数字虚拟飞行仿真计算,模拟复飞爬升任务过程,并采集相关数据,其中爬升梯度CG为航迹倾角γ的正切值:
|
(14) |
最后得到飞机的定常爬升梯度,并根据适航条款的要求,对飞机复飞爬升梯度是否达到数值要求进行评估。
3 评估算例与结果对比以中国自行设计的某型涡喷支线客机为算例飞机,采用其真实构型参数、质量特性数据、发动机数据和气动数据,建立了复飞爬升任务的数字虚拟飞行仿真模型。分别对着陆爬升和进场爬升过程进行仿真,并将得到的爬升梯度评估结果与试飞结果对比,以确定评估精度。其中试飞数据均来源于该型客机的适航取证试飞结果。
3.1 着陆爬升着陆爬升试飞的试飞状态参数和试飞结果如表 2所示。其中,重心在4.48%的机翼平均气动弦长c处,属前重心位置;F4卡位为着陆构型位置,对应襟翼偏度为41.5°,缝翼偏度为20.86°;左右发动机转速NL、NR都是100%,处于复飞推力状态;试飞得到的定常爬升梯度为10.4%。按照表 2设置数字虚拟飞行仿真系统着陆爬升任务的构型参数、任务参数和使用条件,进行仿真计算,部分仿真结果如图 7所示。图 7中:为与试飞数据对比,飞行速度采用校正空速CAS,kn;H为高度;α为迎角。
| 参数 | 数值 | |
| 构型参数 | 重量/kg | 40 101.0 |
| 卡位 | F4 | |
| 重心 | 4.48%c | |
| 起落架 | 放下 | |
| 任务参数 | 试验高度/m | 3 000 |
| NL/% | 100 | |
| VREF/kn | 130.0 | |
| NR/% | 100 | |
| 使用条件 | 静温/K | 270.0 |
| 风速 | 0 | |
| 试飞结果 | 爬升率/(m·s-1) | 8.16 |
| 爬升梯度/% | 10.4 | |

|
| 图 7 着陆爬升过程飞行状态和控制参数时间历程曲线 Fig. 7 Time history curves of flight state and control variables of landing climb |
飞机初始以慢车油门、进近速度VREF=130.0kn稳定下滑时的配平下滑角γapp=-5.88°,当下降至目标高度时驾驶员决定复飞,迅速将发动机油门推至复飞位,也即满油门位置,随后拉杆使飞机转入爬升。在此过程中由于推力和高度先后增加,飞机速度先增加后减小并不断波动,飞机进入持续爬升状态后驾驶员通过操纵升降舵调整爬升角,使空速回复到VREF,并最终获得稳定的爬升梯度。决定复飞8 s后的定常爬升角为6.14°,定常爬升梯度值为10.76%,达到了适航条款3.2%的规定值,且与试飞结果值10.4%非常接近,相对误差仅为3.46%。
3.2 进场爬升表 3所示为进场爬升性能试飞状态参数和结果数据。其中,重心位置在前重心;F3卡位为复飞构型位置,对应的襟翼偏度为25°,缝翼偏度为20.86°;左发动机为复飞推力,NL=100%,右发动机停车,转速为0;试飞得到的定常爬升梯度为3.08%。同样,按照表 3所示真实试飞时的试飞状态定义数字虚拟飞行仿真系统进场爬升任务的仿真设置,进行仿真评估得到的部分仿真结果如图 8所示。图中:β为侧滑角;δPL为左发动机油门(右发动机停车,油门为0)。
| 参数 | 数值 | |
| 构型参数 | 重量/kg | 39 954.7 |
| 卡位 | F3 | |
| 重心 | 3.86%c | |
| 起落架 | 收起 | |
| 任务参数 | 试验高度/m | 3 500 |
| NL/% | 100 | |
| VREF/kn | 165.2 | |
| NR | 0 | |
| 使用条件 | 静温/K | 267.8 |
| 风速 | 0 | |
| 试飞结果 | 爬升率/(m·s-1) | 3.02 |
| 爬升梯度/% | 3.08 | |

|
| 图 8 进场爬升过程飞行状态和控制参数时间历程曲线 Fig. 8 Time historiy curves of flight state and control variables of approach climb |
飞机在试验高度上方以给定的进近速度VREF=165.2 kn沿-3°下滑角稳定下滑时的配平油门为30.5%,下降至目标高度后驾驶员决定复飞,设置右发动机失效,并迅速推满左发动机油门,由于推力不对称,需随后操纵副翼和方向舵稳定飞机姿态,同时操纵升降舵拉起飞机使之转入爬升,飞机最终稳定后向左侧工作发动机一侧滚转约3°,左侧滑约2°。此过程中飞机速度发生波动,进入持续的爬升状态后通过操纵升降舵调整空速回到VREF,进而得到的定常爬升角为1.66°,定常爬升梯度CG=2.89%,满足2.1%的适航条款规定值,与试飞结果值3.08%的相对误差约为6.17%。
4 结论1) 基于适航条款对民机复飞程序和复飞爬升梯度的规定,建立了着陆爬升和进场爬升任务的数字化模型、驾驶员操纵模型、飞机飞行动力学模型,最终构成了可进行复飞任务模拟的数字虚拟飞行仿真系统,提出了基于数字虚拟飞行的复飞爬升梯度适航符合性评估方法。
2) 本文方法可在充分考虑适航规章要求的基础上,准确有效、方便快捷地评估民机复飞爬升性能的适航符合性,并且能够反映驾驶员操纵和飞机的动态过程,另外还具有较好的平台集成性。
3) 在民机的方案设计阶段,可采用本文方法对飞机着陆爬升和进场爬升性能的适航符合性进行评估,为飞机的方案设计和最大着陆重量的确定等提供支持。
| [1] |
刘彦俊. 复飞的分析与探讨[J].
空中交通管理, 2011 (6): 15–17.
LIU Y J. Analysis and discussions on missed approach[J]. Air Traffic Management, 2011 (6): 15–17. (in Chinese) |
| [2] |
中国民用航空局. 中国民用航空规章第25部: 运输类飞机适航标准: CCAR-25-R4[S]. 北京: 中国民用航空局, 2011.
Civil Aviation Administration of China.China civil aviation regulations Part 25:Airworthiness standards of transport category aircraft:CCAR-25-R4[S].Beijing:Civil Aviation Administration of China, 2011(in Chinese). |
| [3] |
田勇, 万莉莉.
飞机性能工程学[M]. 北京: 科学出版社, 2015.
TIAN Y, WAN L L. Aircraft performance engineering[M]. Beijing: Science Press, 2015. (in Chinese) |
| [4] | FILIPPONE A. Flight performance of fixed and rotary wing aircraft[M]. Berlin: Elsevier, 2006. |
| [5] |
蒋苗, 吴洋. CJ818高原起降单发失效爬升梯度分析[J].
民用飞机设计与研究, 2009 (S1): 45–49.
JIANG M, WU Y. Analysis of single failure climbing gradient of CJ818 plateau taking off and landing[J]. Civil Aircraft Design and Research, 2009 (S1): 45–49. (in Chinese) |
| [6] | JOHNSON S C, GLOVER H.Method for determining a currently obtainable climb gradient of an aircraft:U.S.Patent 6, 691, 004[P].2004-02-10. |
| [7] | FILIPPONE A. Theoretical framework for the simulation of transport aircraft flight[J]. Journal of Aircraft, 2010, 47 (5): 1679–1696. DOI:10.2514/1.C000252 |
| [8] |
孟祥光, 王立新, 刘海良. 民机起飞爬升梯度适航符合性数学仿真评估[J].
北京航空航天大学学报, 2016, 42 (10): 2222–2230.
MENG X G, WANG L X, LIU H L. Mathematical simulation and assessment of airworthiness compliance of climb gradient during take-off of civil aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42 (10): 2222–2230. (in Chinese) |
| [9] | BURDUN I Y, DELAURENTIS D A, MAVRIS D N.Modeling and simulation of airworthiness requirements for an hsct prototype in early design:AIAA-1998-4936[R].Reston:AIAA, 1998. |
| [10] | SCHARL J, MAVRIS D N, BURDUN I Y.Use of flight simulation in early design:Formulation and application of the virtual testing and evaluation methodology[C]//World Aviation Conference, 2000:5590. |
| [11] | XU H J, LIU D L, XUE Y, et al. Airworthiness compliance verification method based on simulation of complex system[J]. Chinese Journal of Aeronautics, 2012, 25 (5): 681–690. DOI:10.1016/S1000-9361(11)60434-2 |
| [12] |
刘海良, 王立新. 基于数字虚拟飞行的民用飞机纵向地面操稳特性评估[J].
航空学报, 2015, 36 (5): 1432–1441.
LIU H L, WANG L X. Assessment of longitudinal ground stability and control for civil aircraft based on digital virtual flight testing method[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36 (5): 1432–1441. (in Chinese) |
| [13] | LIU F, WANG L, TAN X. Digital virtual flight testing and evaluation method for flight characteristics airworthiness compliance of civil aircraft based on HQRM[J]. Chinese Journal of Aeronautics, 2015, 28 (1): 112–120. DOI:10.1016/j.cja.2014.12.013 |
| [14] |
美国联邦航空局. 飞机飞行手册[M]. 陈新河, 译. 上海: 上海交通大学出版社, 2010: 298-299, 301.
United States Federal Aviation Administration.Aircraft flight manual[M].CHEN X H, translated.Shanghai:Shanghai Jiao Tong University Press, 2010:298-299, 301(in Chinese). |
| [15] |
修忠信, 由立岩.
运输类飞机合格审定飞行试验指南[M]. 上海: 上海交通大学出版社, 2013: 56.
XIU Z X, YOU L Y. Flight test guide for certification of transport category airplanes[M]. Shanghai: Shanghai Jiao Tong University Press, 2013: 56. (in Chinese) |
| [16] | ETKIN B. Dynamics of flight:Stability and control[M]. New York: John Wiley and Sons, 1995. |
| [17] | HEFFLEY R K.Use of a task-pilot-vehicle (TPV) model as a tool for flight simulator math model development:AIAA-2010-7620[R].Reston:AIAA, 2010. |
| [18] | JOHNSON E N, PRITCHETT A R.Generic pilot and flight control model for use in simulation studies[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.Reston:AIAA, 2002:4694. |
| [19] |
贾重任, 黄成涛, 王立新. 空中最小操纵速度的人机闭环数学仿真计算[J].
北京航空航天大学学报, 2013, 39 (5): 580–584.
JIA Z R, HUANG C T, WANG L X. Mathematical simulation method to calculate air minimum control speed[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39 (5): 580–584. (in Chinese) |
| [20] | POOL D M, MULDER M, ZAAL P M T, et al.Pilot equation in manual control of aircraft dynamics[C]//Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics.Piscataway, NJ:IEEE Press, 2009:2480-2485. |
| [21] | HOSMAN R, VAN DER GEEST P, VAN DER ZEE J.Development of a pilot model for the manual balked landing maneuver:AIAA-2009-5818[R].Reston:AIAA, 2009. |
| [22] | ROBINSON J, BARNES S, WEBB M, et al.The use of pilot modeling in aviation reguatory affairs:AIAA-2009-5825[R].Reston:AIAA, 2009. |
| [23] |
高金源, 李陆豫, 冯亚昌, 等.
飞机飞行品质[M]. 北京: 国防工业出版社, 2003.
GAO J Y, LI L Y, FENG Y C, et al. Aircraft handling qualities[M]. Beijing: National Defend Industry Press, 2003. (in Chinese) |